JZ2440开发板——S3C2440的时钟体系
参考博客
(1)S3C2440-裸机篇-05 | S3C2440时钟体系详解(FCLK、PCLK、HCLK)
一、三种时钟(FCLK、HCLK、PCLK)
如下图所示,S3C2440的时钟控制逻辑,给整个芯片提供三种时钟:
(1)FCLK:用于CPU核;
(2)HCLK:用于接在AHB总线上的设备,比如LCD控制器、存储器控制器、中断控制器、USB主机模块等;
(3)PCLK:用于接在APB总线上的设备,比如看门狗、IIS、I2C、ADC、UART等。

另外由数据手册可知(如下图所示),CPU最大的工作频率可达400MHz,高速设备最大的工作频率可达136MHz,低速设备最大的工作频率是68MHz。

二、如何产生三种时钟
由底板原理图可知(如下图所示),时钟源是12MHz的晶振。

如何由12MHz提高到400MHz?这需要使用到 PLL(锁相环)。
我们来看一下时钟产生框图:

由图可知有两个时钟源:一个是晶振提供时钟源,另一个是通过外部引脚提供时钟源。具体选择哪个时钟源,由选择器的OM[3:2]来决定,如下图所示:

由于 OM[3:2] 引脚接地,所以其值为00,则选择晶振作为时钟源,如下所示:
由图可知,S3C2440有两个PLL,分别叫做MPLL(main PLL)、UPLL(usb PLL)。UPLL专用于USB设备,MPLL用于设置FCLK、HCLK、PCLK。它们的设置方法类似,这里以MPLL为例。
上电时,MPLL没被启动,FCLK等于外部输入的时钟(一般是晶振产生的12Mhz时钟),我们称之为Fin。如果要提高系统的时钟,需要使用软件来启用MPLL。其上电时序图如下所示:

(1)LOCKTIME 寄存器:用于设置锁相时间
Fin进入MPLL后,需要经过一定的时长(时长可以通过 LOCKTIME 寄存器进行设置,我们一般使用默认值0xFFFF-FFFF就好),MPLL才能输出倍频后的 FCLK。

(2)MPLLCON 寄存器:用于设置FCLK与Fin的倍数关系
已知给 MPLL 输入的 Fin=12MHz,如果想让MPLL输出的 FCLK = 400MHz(因为CPU最大的工作频率可达400MHz),该如何设置呢?可以通过 MPLLCON 寄存器进行设置。

有如下公式:
从MPLL输出的FCLK = (2*m*Fin)/(p*2^s)m = MDIV(即 MPLLCON[19:12] 的值 )+ 8p = PDIV(即 MPLLCON[9:4] 的值 )+ 2s = SDIV(即 MPLLCON[1:0] 的值 )数据手册会给出FCLK典型值的设置推荐值,如下图所示,我们编程时使用这些推荐值即可(虽然也可以由公式自己推算)。

(3)CLKDIVN寄存器:用于设置FCLK、HCLK、PCLK的比例
上面已经得到FCLK,那如何由它进一步得到HCLK、PCLK呢?可以将FCLK进行分频,得到HCLK、PCLK,这意味着FCLK、HCLK、PCLK三者存在比例关系。具体的分频系数,可以通过CLKDIVN寄存器进行设置,比如通过 CLKDIVN[2:1] 设置将FCLK分频多少以得到HCLK。

过程总结如下图所示:

三、编程实践
3.1 编程前的分析
在编程之前,注意数据手册有下面的一段描述:

它表明,如果HDIVN的值不设为0(为0则表示HCLK=FCLK/1,而HCLK一般不等于FCLK,所以一般不会设置为0的),则需要添加上图红框内的代码(注意将“R1_nF…”这个宏转换为实际值)。
假设我们需要设置FCLK=400MHz,HCLK=100MHz,PCLK=50MHz。
则根据第二节的描述,我们需要设置MPLLCON寄存器、CLKDIVN寄存器:
(1)关于MPLLCON寄存器的设置。由于400MHz是典型值, 我们使用数据手册给出的设置:
MDIV(即 MPLLCON[19:12] 的值 ):设置为92(0x5c)
PDIV(即 MPLLCON[9:4] 的值 ):设置为1
SDIV(即 MPLLCON[1:0] 的值 ):设置为1
那么MPLLCON寄存器的值应该设置为:(92<<12)|(1<<4)|(1<<0)
(2)关于CLKDIVN寄存器的设置。
由于 HCLK(100MHz) = FCLK(400MHz) / 4,所以CLKDIVN[2:1] = 0b10;而且CAMDIVN[9]要设置为0(初始值默认也为0,那么设不设置好像都行)。

由于 PCLK(50MHz) = HCLK(100MHz) / 2,所以CLKDIVN[0] = 1;
综合起来,CLKDIVN寄存器要设置为0b101=0x5。
3.2 编程实践
完整的代码见链接(课程提供的代码):

(1)其中start.S文件内容如下(我仿写的):
.text
.global _start_start://关看门狗ldr r0,=0x53000000ldr r1,=0str r1,[r0]/*******************************************/ //设置HDIV、PDIV的分频系数,使得FCLK : HCLK : PCLK=400:100:50//通过寄存器CLKDIVN来设置分频系数ldr r0,=0x4c000014ldr r1,=0x5str r1,[r0]//设置CPU工作于异步模式mrc p15,0,r0,c1,c0,0orr r0,r0,#0xc0000000 //R1_nF:OR:R1_iA的值为0xc0000000mcr p15,0,r0,c1,c0,0//设置MPLL的锁相时间/* LOCKTIME(0x4C000000) = 0xFFFFFFFF */ldr r0, =0x4C000000ldr r1, =0xFFFFFFFFstr r1, [r0]//设置MPLL,使它输出400MHzldr r0,=0x4c000004ldr r1,=(92<<12)|(1<<4)|(1<<0)str r1,[r0]
/******************************************************///设置栈/*判断nor/nand启动方式,并设置相应的栈*如何判断启动方式:写0到0地址,然后再读出来,*如果得到0,则表示地址0的内容被修改了,它对应着sram,意味着nand启动*否则为nor启动(因为nor不能直接写)*///ldr r0,[0] //读出原来的值进行备份mov r1,#0ldr r0,[r1]str r1,[r1] //将0写到0地址ldr r2,[r1] //将0地址的内容读出来cmp r1,r2 // r1==r2? 如果相等则表示是nand启动ldr sp,=0x4000000+0x1000 //先假设是nor启动(nor启动时,内部的SRAM映射到0x40000000,4096=0x1000)moveq sp,#4096 //如果相等则表示nand启动,将sp指向内部SRAM的最高地址处streq r0,[r1] //如果相等则表示nand启动,恢复原来的值bl mainhalt:b halt(2)led.c文件的内容如下(我仿写的):
#include "s3c2440_soc.h"void delay(volatile int d)
{while (d--);
}int main(void)
{//设置GPFCON让GPF4/5/6配置为输出引脚GPFCON &= ~((3<<8)|(3<<10)|(3<<12));//先清零GPFCON |= ((1<<8)|(1<<10)|(1<<12));//置位,设置为输出引脚GPFDAT=0xff;//全部熄灭//循环点亮while(1){GPFDAT=0xff;//全部熄灭GPFDAT=0xef;//让LED1亮delay(100000);GPFDAT=0xff;//让LED1灭GPFDAT=0xdf;//让LED2亮delay(100000);GPFDAT=0xff;//让LED2灭GPFDAT=0xbf;//让LED4亮delay(100000);}return 0;
}//课程的版本
#if 0int main(void)
{int val = 0; /* val: 0b000, 0b111 */int tmp;/* 设置GPFCON让GPF4/5/6配置为输出引脚 */GPFCON &= ~((3<<8) | (3<<10) | (3<<12));GPFCON |= ((1<<8) | (1<<10) | (1<<12));/* 循环点亮 */while (1){tmp = ~val;tmp &= 7;GPFDAT &= ~(7<<4);GPFDAT |= (tmp<<4);delay(100000);val++;if (val == 8)val =0;}return 0;
}#endif代码依据是数据手册与原理图中的相关内容,如下所示:

由下面的原理图可知,GPF4~GPF6引脚输出低电平时,对应的LED1、LED2、LED4会亮。


3.3 现象与分析
1、在课程提供的代码(见上面提到的链接)目录下执行make时,在进行链接时报错:
xjh@ubuntu:~/iot/embedded_basic/jz2440/armBareMachine/clk$ make
arm-linux-gcc -c -o led.o led.c
arm-linux-gcc -c -o start.o start.S
arm-linux-ld -Ttext 0 led.o start.o -o led.elf
led.o:(.ARM.exidx+0x0): undefined reference to `__aeabi_unwind_cpp_pr0'
led.o:(.ARM.exidx+0x8): undefined reference to `__aeabi_unwind_cpp_pr1'
make: *** [all] Error 1
xjh@ubuntu:~/iot/embedded_basic/jz2440/armBareMachine/clk$
解决方法是在 arm-linux-gcc 命令加上 -nostdlib 这个选项。它表示不链接系统标准启动文件和标准库文件,只把指定的文件传递给连接器。这个选项常用于编译内核、bootloader等程序,它们不需要启动文件、标准库文件(书P35)。
回顾一下朱的裸机课程,如果 arm-linux-ld 时只有一个待连接的.o文件,Makefile中的arm-linux-gcc命令不需要加上 -nostdlib 这个选项(比如chapter4->8.leds.s),如果有两个待链接的.o文件,则需要加上该选项(比如chapter5->3.set_sp_s及以后的裸机程序)。
这里韦的课程为何不加呢?估计与我环境不一样?
2、一些编程注意事项
(1) &=,这两个符号不能有空格,即不能写成“& =”
GPFCON & = ~((3<<8)|(3<<10)|(3<<12)); //会报错(2)Makefile文件中arm-linux-ld时,.o文件第一个必须是start.o文件!否则可以连接成功,但烧写到开发板后没有现象。
(3)直接写成 ldr r0,[0] 貌似会报错,要写成:
mov r1,#0
ldr r0,[r1](4)课程的led.c文件用的是位操作,我没有仔细分析其代码,而是直接赋值修改。有时间分析一下其代码。
3、烧写现象
以NorFlash启动,在uboot的shell界面下按“n”,使用“usb下载线+dnw”方式将生成的led.bin烧写到NandFlash中。然后改为NandFlash启动,可以看见三颗LED灯在快速地循环点亮。
如果将start.S文件中两条“/**************/”之间的内容(也就是时钟初始化部分)删掉,重新编译烧写运行,可以看见三颗LED灯依然在循环点亮,但速度明显慢许多!(此时FCLK应该是12MHz,而HCLK与PCLK又是多少呢?)
四、总结
1、深入讲解了S3C2440芯片的结构
掌握了S3C2440的时钟体系架构和上电复位时序,其时钟源有两个:外部晶振或者外部时钟,通过OM[3:2]硬件选择;其内部主要调整频率的PLL有两个:MPLL(产生FCLK)和UPLL(产生UCLK);其主要的时钟频率有三个(FCLK->CPU使用,HCLK->AHB总线高速外设使用,PCLK->APB总线低速外设使用),其中HCLK和PCLK由FCLK分频而来。
2、学习了如何进行芯片操作
掌握了如何编程设置寄存器控制S3C2440的时钟频率,比如本节设置FCLK=400Mhz,HCLK=100Mhz,PCLK=50Mhz。
3、其他一些启发
可以关闭某些模块的时钟,以达到省电的目的。 比如设置CLKCON寄存器来关闭某些模块。

相关文章:
JZ2440开发板——S3C2440的时钟体系
参考博客 (1)S3C2440-裸机篇-05 | S3C2440时钟体系详解(FCLK、PCLK、HCLK) 一、三种时钟(FCLK、HCLK、PCLK) 如下图所示,S3C2440的时钟控制逻辑,给整个芯片提供三种时钟࿱…...

[数据集][目标检测]男女性别检测数据集VOC+YOLO格式9769张2类别
数据集格式:Pascal VOC格式YOLO格式(不包含分割路径的txt文件,仅仅包含jpg图片以及对应的VOC格式xml文件和yolo格式txt文件) 图片数量(jpg文件个数):9769 标注数量(xml文件个数):9769 标注数量(txt文件个数):9769 标注…...

static 初始化报错
在 C 或 C 中,当你在函数中使用 static 关键字初始化一个局部变量时,编译器要求初始化器(initializer)是编译时常量。如果你尝试用动态计算的值初始化 static 变量(如函数参数或运行时生成的值),…...

3D Gaussian Splatting 论文学习
概述 目前比较常见的渲染方法大致可以分为2种: 将场景中的物体投影到渲染平面:传统的渲染管线就是这种方式,主要针对Mesh数据,可以将顶点直接投影成2D的形式,配合光栅化、深度测试、Alpha混合等就可以得到渲染的图像…...
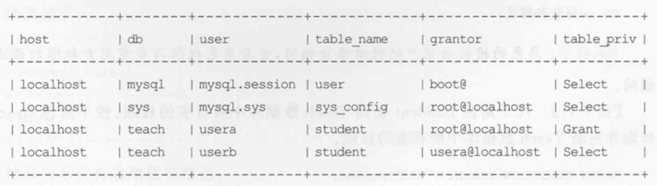
MySQL 安全机制全面解析
在如今的数字化时代,数据库安全 变得越来越重要。为了防止对数据库进行非法操作,MySQL 定义了一套完整的安全机制,包括用户管理、权限管理 和 角色管理。本文将为你深入浅出地介绍这三大安全机制,帮助你轻松掌握MySQL的安全管…...
研究new Vue()中的 initProvide)
vue原理分析(十四)研究new Vue()中的 initProvide
在Vue.prototype._init 中有一些init函数,今天我们来研究这些init函数 Vue.prototype._init function (options) {......{initProxy(vm);}......initLifecycle(vm);initEvents(vm);initRender(vm);callHook$1(vm, beforeCreate, undefined, false /* setContext *…...

Qt控制开发板的LED
Qt控制开发板的LED 使用开发板的IO接口进行控制是嵌入式中非常重要的一点,就像冯诺依曼原理说的一样,一个计算机最起码要有输入输出吧,我们有了信息的接收和处理,那我们就要有输出。 我们在开发板上一般都是使用开发板的GPIO接口…...

S3C2440开发板点亮LED灯+PWM定时器
目录 GPIO引脚和寄存器概述 点亮LED灯步骤 1.配置GPIO 2.点亮LED 设置引脚为输出 控制引脚电平 完整代码 PWM GPIO引脚和寄存器概述 GPIO端口: S3C2440的GPIO引脚可被配置为输入或输出(控制LED的引脚通常配置为输出模式)。寄存器&#…...
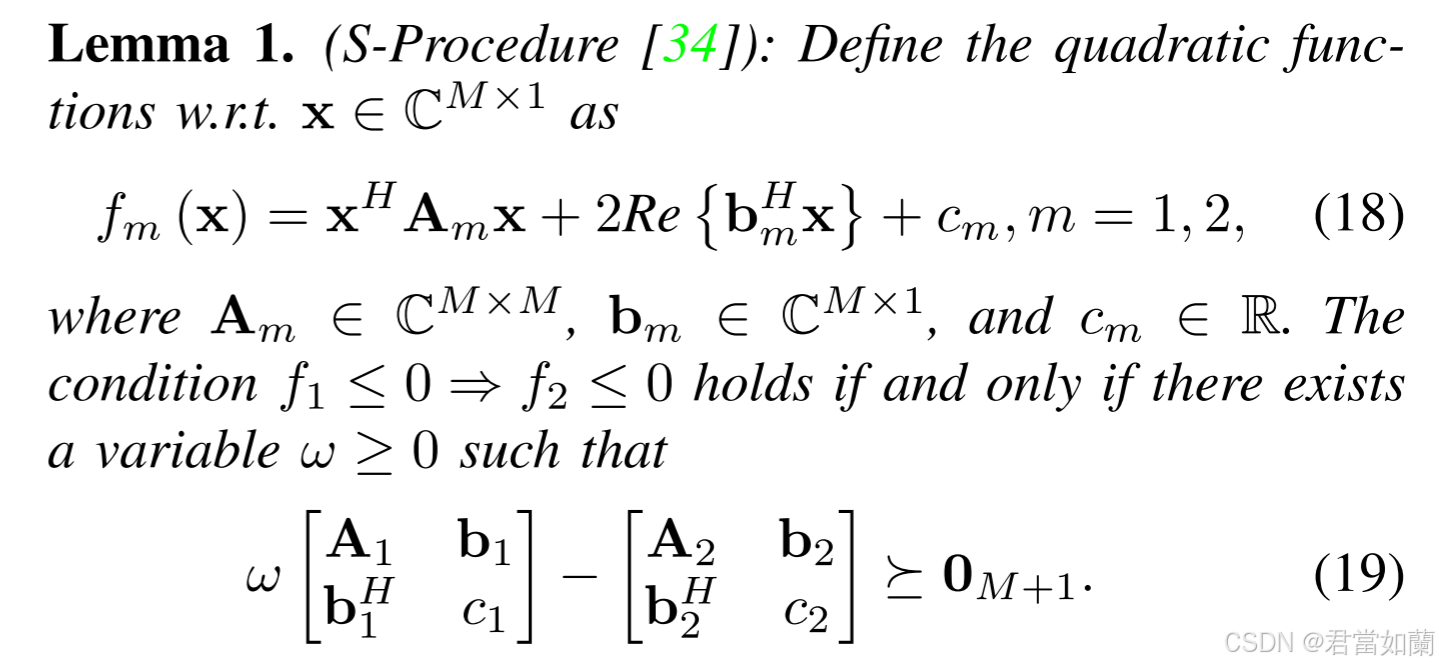
S-Procedure的基本形式及使用
理论 Lemma 1. ( S- Procedure[ 34] ) : Define the quadratic func- \textbf{Lemma 1. ( S- Procedure[ 34] ) : Define the quadratic func- } Lemma 1. ( S- Procedure[ 34] ) : Define the quadratic func- tions w.r.t. x ∈ C M 1 \mathbf{x}\in\mathbb{C}^M\times1 x…...

free -h 查看内存free空间不足
free空间不足 大部分被buff/cache占用 解决办法一: 手动释放缓存 释放页缓存 sudo sync; sudo sysctl -w vm.drop_caches1 释放目录项和inode缓存 sudo sync; sudo sysctl -w vm.drop_caches2 释放所有缓存(页缓存、目录项和inode缓存) sudo sync…...

rust学习笔记
参考资料:https://doc.rust-lang.org/book/ch01-02-hello-world.html 一、 编译与运行 在 Rust 中,编译和运行代码的常用命令是使用 cargo,这是 Rust 的包管理和构建工具。以下是使用 cargo 和 rustc(Rust 编译器)的具…...

【有啥问啥】复习变分下界即证据下界(Evidence Lower Bound, ELBO):原理与应用
复习变分下界即证据下界(Evidence Lower Bound, ELBO):原理与应用 变分下界(Variational Lower Bound),也称为“证据下界”(Evidence Lower Bound, ELBO),是概率模型中的…...

Linux shell编程学习笔记78:cpio命令——文件和目录归档工具(上)
0 前言 在Linux系统中,除了tar命令,我们还可以使用cpio命令来进行文件和目录的归档。 1 cpio命令的功能,帮助信息,格式,选项和参数说明 1.1 cpio命令的功能 cpio 名字来自 "copy in, copy out"…...
为什么在 JSON 序列化中不使用 transient
有些小伙伴发现了,明明在返回的实体类中指定了属性为transient。为什么前端得到的返回json中还是有这个属性的值? 类: private String name; private transient String password;返回结果: { name:"刘大大", password:…...

K8S - Volume - NFS 卷的简介和使用
在之前的文章里已经介绍了 K8S 中两个简单卷类型 hostpath 和 emptydir k8s - Volume 简介和HostPath的使用 K8S - Emptydir - 取代ELK 使用fluentd 构建logging saidcar 但是这两种卷都有同1个限制, 就是依赖于 k8s nodes的空间 如果某个service pod中需要的vol…...

IO模型---BIO、NIO、IO多路复用、AIO详解
本篇将想给详细解释一下什么是BIO、NIO、IO多路复用以及AIO~ 同步的阻塞(BIO)和非阻塞(NIO)的区别 BIO:线程发来IO请求后,一直阻塞着IO线程,需要缓冲区这边数据准备好之后,才会进行下一步的操作。 举个🌰࿱…...

蓝桥杯真题——约翰的牛奶
输入样例: 8 9 10 输出样例: 1 2 8 9 10 本题是宽搜的模版题,不论怎么倒牛奶,A,B,C 桶里的牛奶可以看做一个三元点集 我们只要找到A桶是空的,B,C桶中的状态即可 #include <iostream> #include <cstring…...

单机docker-compose部署minio
单机多副本docker-compose部署minio 简单介绍 如果服务器有限可以单机挂载多硬盘实现多副本容错(生产不推荐) 部署好的文件状态 有两个重要文件 docker-compose.yaml和nginx.conf docker-compose.yaml是docker部署容器的配置信息包括4个minio和1个ng…...

Winform实现弹出定时框功能
1、程序 private void TimeDialogInitialize(){for(int i1; i<30;i){cbbTimeDialog.Items.Add(i);}}private void cbbTimeDialog_SelectedIndexChanged(object sender, EventArgs e){foreach(int i in cbbTimeDialog.Items){if(cbbTimeDialog.SelectedItem!null &&…...

【机器学习(四)】分类和回归任务-梯度提升决策树(GBDT)-Sentosa_DSML社区版
文章目录 一、算法概念一、算法原理(一) GBDT 及负梯度拟合原理(二) GBDT 回归和分类1、GBDT回归1、GBDT分类二元分类多元分类 (三)损失函数1、回归问题的损失函数2. 分类问题的损失函数: 三、G…...

小学期学习报告-1
通过B站视频学习之后,我掌握冰设计出了555方波发生电路和低通滤波器,通过示波器可以看到,已经除了稳定的方波和正弦波 在这个过程中,根据公式T0.7*( R12R2)*C1,多次调整并得出稳定波形ÿ…...

【NotebookLM食品科研提效指南】:3天内将文献综述效率提升300%的5个隐藏技巧
更多请点击: https://codechina.net 第一章:NotebookLM食品科学研究的范式变革 传统食品科学研究长期依赖人工文献综述、实验数据孤立归档与跨模态信息割裂分析,导致知识发现周期长、可复现性弱、跨学科协同成本高。NotebookLM 的引入正从根…...

Borderless Gaming终极指南:如何轻松实现无边框游戏窗口管理
Borderless Gaming终极指南:如何轻松实现无边框游戏窗口管理 【免费下载链接】Borderless-Gaming Play your favorite games in a borderless window; no more time consuming alt-tabs. 项目地址: https://gitcode.com/gh_mirrors/bo/Borderless-Gaming 你…...

RT-Thread Nano串口控制台移植:GD32F470实现rt_kprintf打印与调试
1. 项目概述与核心目标上次我们成功把 RT-Thread Nano 内核搬到了梁山派 GD32F470 开发板上,让这块高性能的 MCU 跑起了实时任务调度。但光有内核,就像给电脑装好了操作系统却没法敲命令、看输出,调试和交互起来非常别扭。官方 Nano 包的精髓…...

AI写教材新突破!低查重工具,快速生成完整教材框架与内容!
教材编写困境与 AI 工具的破局之道 很多教材编写者常常感到困扰:尽管他们在正文内容上付出了大量心血,但由于缺乏配套资源,最终的教学效果难以理想化。设计课后练习时,缺乏新颖的题型构思;想制作直观的教学课件&#…...

如何像管理代码一样构建个人技能树:从知识管理到职业发展
1. 项目概述与核心价值最近在整理个人知识库和技能树时,发现了一个挺有意思的项目,叫mxyhi/ok-skills。乍一看,这像是一个个人仓库,但深入探究后,我发现它远不止是一个简单的代码托管。它更像是一个结构化的个人能力发…...

恶意软件分析利器:基于统计特征的二进制模式识别与批量编辑工具
1. 项目概述:一个面向恶意软件分析的“均值”编辑器最近在分析一些PUA(潜在不受欢迎应用程序)和恶意软件样本时,我经常遇到一个头疼的问题:很多样本为了绕过静态检测,会嵌入大量垃圾代码、花指令࿰…...

AzurLaneAutoScript:碧蓝航线玩家的终极自动刷图解决方案
AzurLaneAutoScript:碧蓝航线玩家的终极自动刷图解决方案 【免费下载链接】AzurLaneAutoScript Azur Lane bot (CN/EN/JP/TW) 碧蓝航线脚本 | 无缝委托科研,全自动大世界 项目地址: https://gitcode.com/gh_mirrors/az/AzurLaneAutoScript 还在为…...

如何重新定义macOS兼容性:OpenCore Legacy Patcher的完整实践指南
如何重新定义macOS兼容性:OpenCore Legacy Patcher的完整实践指南 【免费下载链接】OpenCore-Legacy-Patcher Experience macOS just like before 项目地址: https://gitcode.com/GitHub_Trending/op/OpenCore-Legacy-Patcher 在技术快速迭代的时代ÿ…...

论文降 AI 软件红黑榜!这 3 类是套壳 ChatGPT 改完 AI 率反涨 30% 别用
论文降 AI 软件红黑榜!这 3 类是套壳 ChatGPT 改完 AI 率反涨 30% 别用 每年毕业季都有同学跑来问我——「学姐我花了 200 块买的降 AI 工具,降完之后送知网检测 AI 率反而涨了 30 个点,怎么回事?」这不是段子,是 202…...