Robot Operating System——带有时间戳和坐标系信息的多边形信息
大纲
- 应用场景
- 1. 机器人导航
- 场景描述
- 具体应用
- 2. 环境建模
- 场景描述
- 具体应用
- 3. 路径规划
- 场景描述
- 具体应用
- 4. 无人机飞行控制
- 场景描述
- 具体应用
- 5. 机械臂运动控制
- 场景描述
- 具体应用
- 6. 自动驾驶车辆控制
- 场景描述
- 具体应用
- 定义
- 字段解释
- 案例
geometry_msgs::msg::PolygonStamped 是 ROS 2 中的一个消息类型,用于表示带有时间戳和坐标系信息的多边形。它包含一个 std_msgs::msg::Header 和一个 geometry_msgs::msg::Polygon。这种消息类型在需要记录多边形的时间和坐标系信息的场景中非常有用,例如机器人导航、环境建模、路径规划和避障等。
应用场景
1. 机器人导航
场景描述
在机器人导航中,需要使用带有时间戳和坐标系信息的多边形来表示导航区域、障碍物和路径。这对于实现机器人在复杂环境中的自主导航和避障至关重要。
具体应用
- 导航区域:使用 geometry_msgs::msg::PolygonStamped 表示机器人可以导航的区域。例如,在室内导航任务中,使用 PolygonStamped 消息表示机器人可以行驶的区域,以进行路径规划和导航,并记录导航区域的时间和坐标系信息。
- 障碍物表示:使用 geometry_msgs::msg::PolygonStamped 表示环境中的障碍物。例如,在机器人避障任务中,使用 PolygonStamped 消息表示障碍物的边界,以帮助机器人避开障碍物,并记录障碍物的时间和坐标系信息。
- 路径规划:使用 geometry_msgs::msg::PolygonStamped 表示机器人导航路径上的关键区域。例如,在机器人路径规划任务中,使用 PolygonStamped 消息表示路径上的关键区域,以引导机器人沿着预定路径行驶,并记录路径区域的时间和坐标系信息。
2. 环境建模
场景描述
在环境建模中,需要使用带有时间戳和坐标系信息的多边形来表示环境中的物体和区域。这对于构建精确的环境模型和进行环境感知非常重要。
具体应用
- 房间建模:使用 geometry_msgs::msg::PolygonStamped 表示房间的边界。例如,在室内环境建模任务中,使用 PolygonStamped 消息表示房间的边界,以构建室内环境模型,并记录房间边界的时间和坐标系信息。
- 物体表示:使用 geometry_msgs::msg::PolygonStamped 表示环境中的物体边界。例如,在物体识别任务中,使用 PolygonStamped 消息表示物体的边界,以进行物体识别和定位,并记录物体边界的时间和坐标系信息。
- 区域划分:使用 geometry_msgs::msg::PolygonStamped 表示环境中的不同区域。例如,在环境监测任务中,使用 PolygonStamped 消息表示监测区域的边界,以进行区域划分和监测,并记录区域边界的时间和坐标系信息。
3. 路径规划
场景描述
在路径规划中,需要使用带有时间戳和坐标系信息的多边形来表示路径上的关键区域和障碍物。这对于实现机器人在复杂环境中的路径规划和导航非常重要。
具体应用
- 关键区域表示:使用 geometry_msgs::msg::PolygonStamped 表示路径上的关键区域。例如,在机器人路径规划任务中,使用 PolygonStamped 消息表示路径上的关键区域,以引导机器人沿着预定路径行驶,并记录关键区域的时间和坐标系信息。
- 障碍物避让:使用 geometry_msgs::msg::PolygonStamped 表示路径上的障碍物。例如,在机器人避障任务中,使用 PolygonStamped 消息表示路径上的障碍物,以帮助机器人避开障碍物,并记录障碍物的时间和坐标系信息。
- 路径优化:使用 geometry_msgs::msg::PolygonStamped 表示路径上的优化区域。例如,在机器人路径优化任务中,使用 PolygonStamped 消息表示路径上的优化区域,以进行路径优化和导航,并记录优化区域的时间和坐标系信息。
4. 无人机飞行控制
场景描述
在无人机飞行控制中,需要使用带有时间戳和坐标系信息的多边形来表示飞行区域和障碍物。这对于实现无人机在三维空间中的稳定飞行和精确操作非常重要。
具体应用
- 飞行区域表示:使用 geometry_msgs::msg::PolygonStamped 表示无人机可以飞行的区域。例如,在无人机巡检任务中,使用 PolygonStamped 消息表示无人机可以飞行的区域,以进行飞行路径规划和导航,并记录飞行区域的时间和坐标系信息。
- 障碍物表示:使用 geometry_msgs::msg::PolygonStamped 表示飞行路径上的障碍物。例如,在无人机避障任务中,使用 PolygonStamped 消息表示飞行路径上的障碍物,以帮助无人机避开障碍物,并记录障碍物的时间和坐标系信息。
- 飞行路径规划:使用 geometry_msgs::msg::PolygonStamped 表示飞行路径上的关键区域。例如,在无人机飞行路径规划任务中,使用 PolygonStamped 消息表示飞行路径上的关键区域,以引导无人机沿着预定路径飞行,并记录关键区域的时间和坐标系信息。
5. 机械臂运动控制
场景描述
在机械臂运动控制中,需要使用带有时间戳和坐标系信息的多边形来表示工作空间和障碍物。这对于实现机械臂在工作空间中的精确操作非常重要。
具体应用
- 工作空间表示:使用 geometry_msgs::msg::PolygonStamped 表示机械臂的工作空间。例如,在机器人装配任务中,使用 PolygonStamped 消息表示机械臂的工作空间,以进行路径规划和操作,并记录工作空间的时间和坐标系信息。
- 障碍物表示:使用 geometry_msgs::msg::PolygonStamped 表示工作空间中的障碍物。例如,在机器人避障任务中,使用 PolygonStamped 消息表示工作空间中的障碍物,以帮助机械臂避开障碍物,并记录障碍物的时间和坐标系信息。
- 路径规划:使用 geometry_msgs::msg::PolygonStamped 表示机械臂运动路径上的关键区域。例如,在机器人焊接任务中,使用 PolygonStamped 消息表示焊接路径上的关键区域,以引导机械臂沿着预定路径运动,并记录关键区域的时间和坐标系信息。
6. 自动驾驶车辆控制
场景描述
在自动驾驶车辆控制中,需要使用带有时间戳和坐标系信息的多边形来表示导航区域和障碍物。这对于实现自动驾驶车辆在复杂交通环境中的自主行驶和精确导航非常重要。
具体应用
- 导航区域表示:使用 geometry_msgs::msg::PolygonStamped 表示自动驾驶车辆可以行驶的区域。例如,在自动驾驶车辆导航任务中,使用 PolygonStamped 消息表示车辆可以行驶的区域,以进行路径规划和导航,并记录导航区域的时间和坐标系信息。
- 障碍物表示:使用 geometry_msgs::msg::PolygonStamped 表示导航路径上的障碍物。例如,在自动驾驶车辆避障任务中,使用 PolygonStamped 消息表示导航路径上的障碍物,以帮助车辆避开障碍物,并记录障碍物的时间和坐标系信息。
- 路径规划:使用 geometry_msgs::msg::PolygonStamped 表示导航路径上的关键区域。例如,在自动驾驶车辆路径规划任务中,使用 PolygonStamped 消息表示导航路径上的关键区域,以引导车辆沿着预定路径行驶,并记录关键区域的时间和坐标系信息。
定义
namespace geometry_msgs
{
namespace msg
{struct PolygonStamped
{std_msgs::msg::Header header;geometry_msgs::msg::Polygon polygon;
};} // namespace msg
} // namespace geometry_msgs
字段解释
- header:包含时间戳和坐标系信息的头部。
- stamp:时间戳,表示消息生成的时间。
- frame_id:坐标系的ID,表示多边形所在的坐标系。
- polygon:表示多边形的顶点数组,每个顶点由 geometry_msgs::msg::Point32 表示。
- points:点数组,每个点包含 x、y 和 z 坐标。
案例
#include "rclcpp/rclcpp.hpp"
#include "geometry_msgs/msg/polygon_stamped.hpp"
#include "geometry_msgs/msg/point32.hpp"class PolygonStampedPublisher : public rclcpp::Node
{
public:PolygonStampedPublisher() : Node("polygon_stamped_publisher"){publisher_ = this->create_publisher<geometry_msgs::msg::PolygonStamped>("polygon_stamped_topic", 10);timer_ = this->create_wall_timer(500ms, std::bind(&PolygonStampedPublisher::publish_polygon_stamped, this));}private:void publish_polygon_stamped(){auto message = geometry_msgs::msg::PolygonStamped();message.header.stamp = this->now();message.header.frame_id = "map";geometry_msgs::msg::Point32 point1, point2, point3;point1.x = 0.0;point1.y = 0.0;point1.z = 0.0;point2.x = 1.0;point2.y = 0.0;point2.z = 0.0;point3.x = 0.5;point3.y = 1.0;point3.z = 0.0;message.polygon.points.push_back(point1);message.polygon.points.push_back(point2);message.polygon.points.push_back(point3);publisher_->publish(message);}rclcpp::Publisher<geometry_msgs::msg::PolygonStamped>::SharedPtr publisher_;rclcpp::TimerBase::SharedPtr timer_;
};int main(int argc, char *argv[])
{rclcpp::init(argc, argv);rclcpp::spin(std::make_shared<PolygonStampedPublisher>());rclcpp::shutdown();return 0;
}
相关文章:

Robot Operating System——带有时间戳和坐标系信息的多边形信息
大纲 应用场景1. 机器人导航场景描述具体应用 2. 环境建模场景描述具体应用 3. 路径规划场景描述具体应用 4. 无人机飞行控制场景描述具体应用 5. 机械臂运动控制场景描述具体应用 6. 自动驾驶车辆控制场景描述具体应用 定义字段解释 案例 geometry_msgs::msg::PolygonStamped …...

内网穿透(当使用支付宝沙箱的时候需要内网穿透进行回调)
内网穿透 一、为什么要使用内网穿透: 内网穿透也称内网映射,简单来说就是让外网可以访问你的内网:把自己的内网(主机)当做服务器,让外网访问 二、安装路由侠 路由侠-局域网变公网 (luyouxia.com) 安装成功如下: 三…...

Contact Form 7最新5.9.8版错误修复方案
最近有多位用户反应Contact Form 7最新5.9.8版的管理页面有错误如下图所示 具体错误文件的路径为wp-content\plugins\contact-form-7\admin\includes\welcome-panel.php on line 153 找到welcome-panel.php这个文件编辑它,将如下图选中的部分删除 删除以后…...

【第十一章:Sentosa_DSML社区版-机器学习之分类】
目录 11.1 逻辑回归分类 11.2 决策树分类 11.3 梯度提升决策树分类 11.4 XGBoost分类 11.5 随机森林分类 11.6 朴素贝叶斯分类 11.7 支持向量机分类 11.8 多层感知机分类 11.9 LightGBM分类 11.10 因子分解机分类 11.11 AdaBoost分类 11.12 KNN分类 【第十一章&…...

kafka3.8的基本操作
Kafka基础理论与常用命令详解(超详细)_kafka常用命令和解释-CSDN博客 [rootk1 bin]# netstat -tunlp|grep 90 tcp6 0 0 :::9092 :::* LISTEN 14512/java [rootk1 bin]# ./kafka-topics.s…...

如何检测并阻止机器人活动
恶意机器人流量逐年增加,占 2023 年所有互联网流量的近三分之一。恶意机器人会访问敏感数据、实施欺诈、窃取专有信息并降低网站性能。新技术使欺诈者能够更快地发动攻击并造成更大的破坏。机器人的无差别和大规模攻击对所有行业各种规模的企业都构成风险。 但您的…...

《linux系统》基础操作
二、综合应用题(共50分) 随着云计算技术、容器化技术和移动技术的不断发展,Unux服务器已经成为全球市场的主导者,因此具备常用服务器的配置与管理能力很有必要。公司因工作需要,需要建立相应部门的目录,搭建samba服务器和FTP服务器,要求将销售部的资料存放在samba服务器…...

EMT-LTR--学习任务间关系的多目标多任务优化
EMT-LTR–学习任务间关系的多目标多任务优化 title: Learning Task Relationships in Evolutionary Multitasking for Multiobjective Continuous Optimization author: Zefeng Chen, Yuren Zhou, Xiaoyu He, and Jun Zhang. journal: IEE…...

MySQL record 08 part
数据库连接池: Java DataBase Connectivity(Java语言连接数据库) 答: 使用连接池能解决此问题, 连接池,自动分配连接对象,并对闲置的连接进行回收。 常用的数据库连接池: 建立数…...
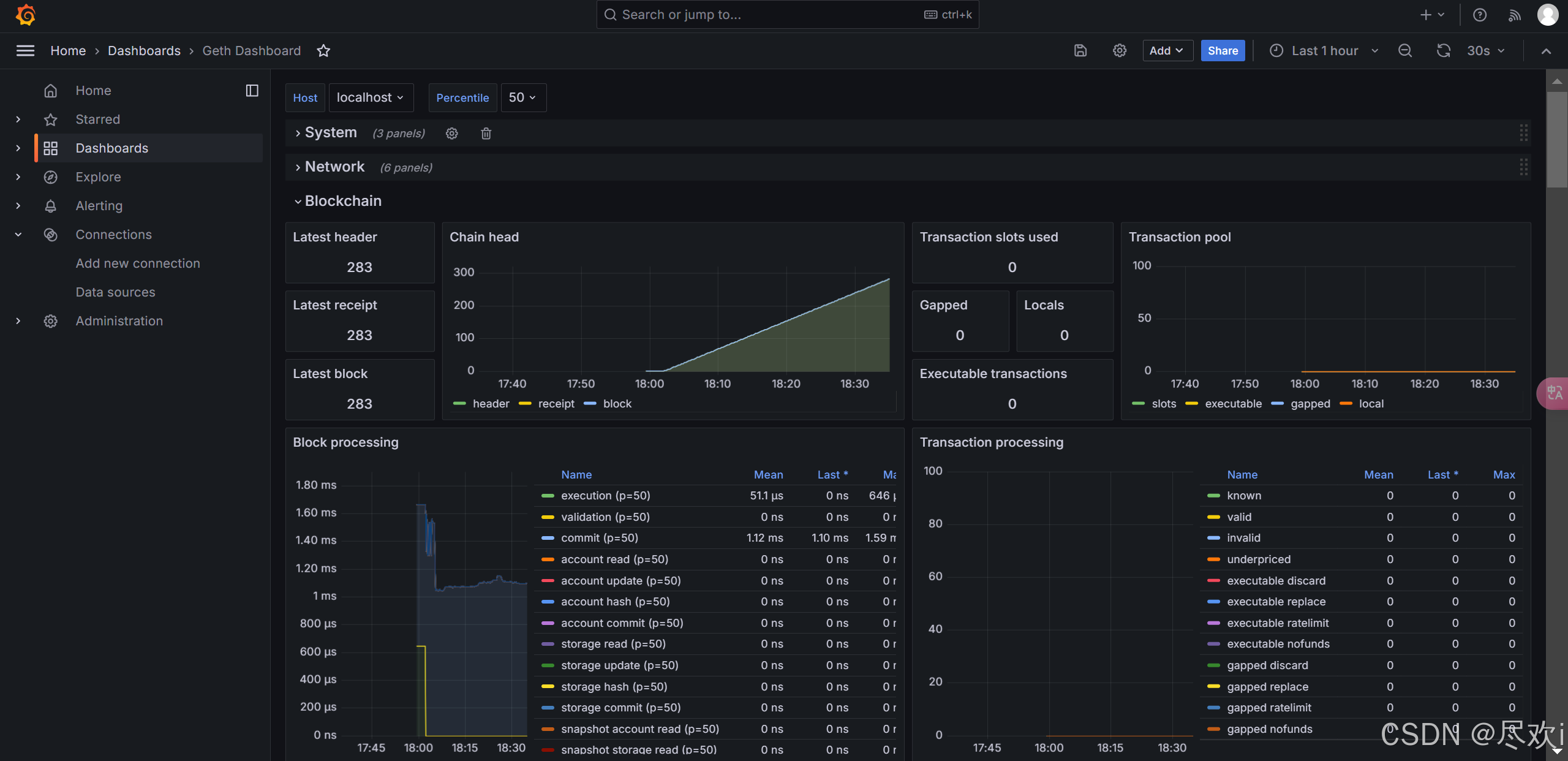
打造以太坊数据监控利器:InfluxDB与Grafana构建Geth可视化分析平台
前言 以太坊客户端收集大量数据,这些数据可以按时间顺序数据库的形式读取。为了简化监控,这些数据可以输入到数据可视化软件中。在此页面上,将配置 Geth 客户端以将数据推送到 InfluxDB 数据库,并使用 Grafana 来可视化数据。 一…...

对onlyoffice进行定制化开发
基于onlyoffice8.0源码,进行二次开发,可实现包括但不限于以下的功能 1、内容控件的插入 2、内容空间的批量替换 3、插入文本 4、插入图片 5、添加,去除水印 6、修改同时在线人数限制 7、内容域的删除 8、页面UI的定制化 9、新增插件开发 10、…...

使用llama.cpp 在推理MiniCPM-1.2B模型
llama.cpp 是一个开源项目,它允许用户在C中实现与LLaMA(Large Language Model Meta AI)模型的交互。LLaMA模型是由Meta Platforms开发的一种大型语言模型,虽然llama.cpp本身并不包含LLaMA模型的训练代码或模型权重,但它…...

分布式环境中,接口超时重试带来的的幂等问题如何解决?
目录标题 幂等不能解决接口超时吗?幂等的重要性什么是幂等?为什么需要幂等?接口超时了,到底如何处理? 如何设计幂等?幂等设计的基本流程实现幂等的8种方案1.selectinsert主键/唯一索引冲突(常用)2.直接insert 主键…...

设计一个推荐系统:使用协同过滤算法
设计一个推荐系统:使用协同过滤算法 在当今数据驱动的时代,推荐系统已经成为了许多在线平台(如电商、社交媒体和流媒体服务)不可或缺的一部分。推荐系统通过分析用户的行为和偏好,向用户推荐可能感兴趣的内容或产品。本文将详细介绍如何设计一个基于协同过滤算法的推荐系…...
Linux 基本指令(二)
目录 1. more指令 2. less指令(重要) 3. head指令 4. tail指令 5. date指令 (1)可以通过选项来指定格式: 编辑 (2)在设定时间方面 (3)时间戳 6. cal指令 7. find指令 8. grep指令 9. alias指令 10. zip指令与unzip指令 (1). zip指令 (2). unzip指令…...

Facebook的用户隐私保护:从争议到革新
Facebook早期的数据收集方式引发了隐私担忧。平台的快速增长和用户数据的大规模收集使得隐私问题逐渐显现。尤其是在2018年,剑桥分析事件暴露了数千万用户数据被不当使用的问题。这一事件揭示了Facebook在数据保护方面的严重漏洞,引发了公众对隐私保护的…...

计算机前沿技术-人工智能算法-大语言模型-最新论文阅读-2024-09-23
计算机前沿技术-人工智能算法-大语言模型-最新论文阅读-2024-09-23 本期,我们对大语言模型在表情推荐, 软件安全和 自动化软件漏洞检测等方面如何应用,提供几篇最新的参考文章。 1 Semantics Preserving Emoji Recommendation with Large Language Mod…...
2024.9.20)
C++(学习)2024.9.20
目录 C面向对象的基础知识 this指针 概念 功能 1.类内调用成员 2.区分重名的成员变量和局部变量 3. 链式调用 static关键字 1.静态局部变量 2.静态成员变量 3.静态成员函数 4.单例设计模式 const关键字 1.const修饰成员函数 2.const修饰对象 3.const修饰成员变量…...
让AI激发创作力:OpenAI分享5位专业作家利用ChatGPT写作的案例技巧
大家好,我是木易,一个持续关注AI领域的互联网技术产品经理,国内Top2本科,美国Top10 CS研究生,MBA。我坚信AI是普通人变强的“外挂”,专注于分享AI全维度知识,包括但不限于AI科普,AI工…...

UEFI EDK2框架学习 (一)
01 Shell界面打印 执行qemu指令后 qemu-system-x86_64 -drive ifpflash,formatraw,fileOVMF.fd -nographic -net none出现shell界面 02 在UEFI shell中创建APP 创建SimplestApp文件夹以及SimplestApp.c、SimplestApp.inf cd edk2 mkdir SimplestAppuuidgen // generate …...

Lusca CSP策略完全指南:构建安全的内容安全策略
Lusca CSP策略完全指南:构建安全的内容安全策略 【免费下载链接】lusca Application security for express apps. 项目地址: https://gitcode.com/gh_mirrors/lu/lusca Lusca是一款专为Express应用打造的安全中间件,提供了全面的内容安全策略&…...

Unity3d之随机生成数字
UnityEngine.Random.Range(min,max)包含最小值不包含最大值Mathf.Clamp是限定范围...

大模型应用开发:从需求分析到上线的全流程指南
一、需求分析:锚定测试视角下的开发方向对于软件测试从业者而言,大模型应用开发的需求分析阶段,核心是跳出传统功能测试的思维局限,从“验证功能正确性”转向“定义AI能力边界”。首先要明确业务场景的核心诉求,比如开…...

告别手动标注!用X-AnyLabeling和SAM-HQ模型,5分钟搞定你的第一个AI标注项目
5分钟极速上手:用X-AnyLabeling与SAM-HQ实现零基础AI标注 在计算机视觉项目的早期阶段,数据标注往往是最耗时的环节。传统手工标注一张图片可能需要几分钟到几十分钟不等,而一个中等规模的数据集往往需要数千张标注样本。这种低效的工作流程…...

新消费品牌的详情页,不该是产品说明书
很多企业做电商页面时,会把重点放在“展示产品”上。图片要好看,卖点要完整,参数要齐全,详情页要显得丰富,品牌故事要讲出来,工艺优势要摆出来,证书、原料、产地、功能、包装、规格、适用人群&a…...

Purple Pi OH开发板适配OpenHarmony 5.0全流程解析与实战
1. 项目概述:从一块开发板到OpenHarmony 5.0的完整旅程最近,我手头的这块触觉智能Purple Pi OH开发板,终于成功跑通了OpenHarmony 5.0 Release版本。这不仅仅是一次简单的系统升级适配,更像是一场从硬件引脚定义、内核驱动、系统服…...

AArch64虚拟内存系统架构与硬件自动更新机制详解
1. AArch64虚拟内存系统架构概述AArch64是ARMv8及ARMv9架构的64位执行状态,其虚拟内存系统架构(Virtual Memory System Architecture)是现代ARM处理器的核心组成部分。这套系统通过多级页表机制实现虚拟地址到物理地址的转换,为操…...

JoyCon-Driver:Windows平台上的Switch手柄完美解决方案
JoyCon-Driver:Windows平台上的Switch手柄完美解决方案 【免费下载链接】JoyCon-Driver A vJoy feeder for the Nintendo Switch JoyCons and Pro Controller 项目地址: https://gitcode.com/gh_mirrors/jo/JoyCon-Driver 还在为Nintendo Switch JoyCon控制器…...

如何快速掌握ComfyUI智能图像分割:面向新手的完整指南
如何快速掌握ComfyUI智能图像分割:面向新手的完整指南 【免费下载链接】comfyui_segment_anything Based on GroundingDino and SAM, use semantic strings to segment any element in an image. The comfyui version of sd-webui-segment-anything. 项目地址: ht…...
到底怎么玩)
别再只把JTAG当烧录器了!一文搞懂它的边界扫描(Boundary-Scan)到底怎么玩
解锁JTAG边界扫描的隐藏技能:从烧录到硬件诊断的全能玩法 在嵌入式开发领域,JTAG接口常被简化为"烧录工具"的代名词——这种认知偏差让我们错失了它最强大的能力。想象一下:当PCB上某个关键信号无法测量时,当BGA封装的芯…...