安全与道路测试:自动驾驶系统安全性探究
随着自动驾驶技术的迅速发展,如何确保自动驾驶系统的安全性已成为业界关注的焦点。本文将探讨自动驾驶系统的潜在风险、安全设计原则和道路测试要求。
潜在风险
自动驾驶系统在改善交通安全和提高出行效率方面具有巨大潜力,但其安全性仍面临许多挑战,主要包括:
-
技术故障:自动驾驶系统依赖于诸如传感器、雷达和摄像头等设备,它们可能会出现故障或误报。
-
软件缺陷:自动驾驶软件可能存在未知的缺陷,导致系统错误。
-
安全隐患:恶意攻击者可能破坏自动驾驶系统,导致安全问题。
-
法规与道路基础设施:现行的法规和道路基础设施可能不适应自动驾驶技术的应用。
安全设计原则
为确保自动驾驶系统的安全性,设计时需遵循以下原则:
-
功能安全:确保系统在故障情况下仍能保持安全运行。
-
红团队测试:定期进行内部和外部安全审查,以发现并修复潜在漏洞。
-
隐私保护:设计系统时,确保数据安全和用户隐私得到保护。
-
透明度和责任:确保相关利益方了解自动驾驶系统的运作原理,并承担相应责任。
道路测试要求
在自动驾驶系统投入市场之前,应进行充分的道路测试,主要包括:
-
仿真测试:在虚拟环境中对自动驾驶系统进行大量测试,以确保其在各种场景下的稳定性和安全性。
-
封闭场地测试:在真实环境中对自动驾驶系统进行封闭场地测试,评估其在复杂道路条件下的表现。
-
公开道路测试:在公开道路上进行有限的测试,以评估系统在实际交通环境中的性能。
以下是一个简单的Python代码示例,用于计算自动驾驶系统在虚拟环境中的行驶里程:
import randomdef simulate_miles_driven(autonomous_system, num_tests):total_miles =0for _ in range(num_tests):miles = random.randint(20, 200) # 模拟每次测试行驶的里程total_miles += milesreturn total_miles
autonomous_system = "AS1"
num_tests = 1000total_miles = simulate_miles_driven(autonomous_system, num_tests)
print(f"自动驾驶系统 {autonomous_system} 在 {num_tests} 次虚拟测试中累计行驶 {total_miles} 英里。")
## 结论
自动驾驶技术正逐步变革交通出行方式,提高道路安全和效率。但要确保自动驾驶系统的安全性,我们需要关注潜在风险,遵循安全设计原则,并进行充分的道路测试。通过这些措施,我们可以期待一个更安全、更高效的自动驾驶未来。
未来发展和监管建议
为了应对自动驾驶技术的未来发展,我们需要在以下几个方面采取措施:
-
技术创新:鼓励企业和研究机构在自动驾驶领域进行创新,不断提高系统的安全性、可靠性和性能。
-
法规更新:政府和监管部门应调整现有法规,以适应自动驾驶技术的发展,并为其普及创造便利条件。
-
基础设施改进:逐步完善道路基础设施,以适应自动驾驶技术的需求,如设置专用车道、增加传感器和信号系统等。
-
教育和培训:提高公众对自动驾驶技术的认识和接受度,通过培训和教育提高驾驶员与自动驾驶系统的互动能力。
-
保险与责任:重新定义保险责任,确保在自动驾驶事故中能明确责任归属,有助于加速自动驾驶技术的普及。
下面是一个简单的 Python 代码示例,用于评估自动驾驶系统在不同道路条件下的表现:
def evaluate_performance(autonomous_system, road_conditions):performance_scores = {}for condition in road_conditions:score = random.uniform(0, 100) # 模拟系统在特定道路条件下的表现评分performance_scores[condition] = scorereturn performance_scoresautonomous_system = "AS1"
road_conditions = ['晴天', '雨天', '雪天', '大风']performance_scores = evaluate_performance(autonomous_system, road_conditions)
print(f"自动驾驶系统 {autonomous_system} 在不同道路条件下的表现评分:")
for condition, score in performance_scores.items():print(f"{condition}: {score:.2f} 分")
通过持续关注自动驾驶技术的发展趋势和安全性问题,我们可以更好地应对潜在风险,确保自动驾驶系统的安全运行。同时,政府、企业和公众应共同努力,推动自动驾驶技术的持续发展和普及。
相关文章:

安全与道路测试:自动驾驶系统安全性探究
随着自动驾驶技术的迅速发展,如何确保自动驾驶系统的安全性已成为业界关注的焦点。本文将探讨自动驾驶系统的潜在风险、安全设计原则和道路测试要求。 潜在风险 自动驾驶系统在改善交通安全和提高出行效率方面具有巨大潜力,但其安全性仍面临许多挑战&a…...

chatGPT学英语,真香!!!
文章目录学习目标学习内容目标方式过程学习时间学习产出学习目标 能够在三个月的练习后,和真人外教比较流畅的沟通! 最近chatGPT实在是太火了,各种事情都能干,能改论文、写代码和翻译。 看到B站很多教程教我们直接用chatGPT进行…...

12 Cache Memory
内存的层次结构 计算机内存的层级结构是一种将不同类型的存储设备按照速度、容量和访问时间组织起来的方式。这种层级结构提高了计算机的性能,使得处理器能够高效地访问数据。通常,内存层级结构可分为以下几个层次: 寄存器:寄存器…...
【CSS系列】第一章 · CSS基础
写在前面 Hello大家好, 我是【麟-小白】,一位软件工程专业的学生,喜好计算机知识。希望大家能够一起学习进步呀!本人是一名在读大学生,专业水平有限,如发现错误或不足之处,请多多指正࿰…...

【Java代码审计】表达式注入
1 前置知识 1.1 EL表达式 EL表达式主要功能: 获取数据:可以从JSP四大作用域中获取数据执行运算:执行一些关系运算,逻辑运算,算术运算获取web开发常用对象:通过内置 的11个隐式对象获取想要的数据调用jav…...
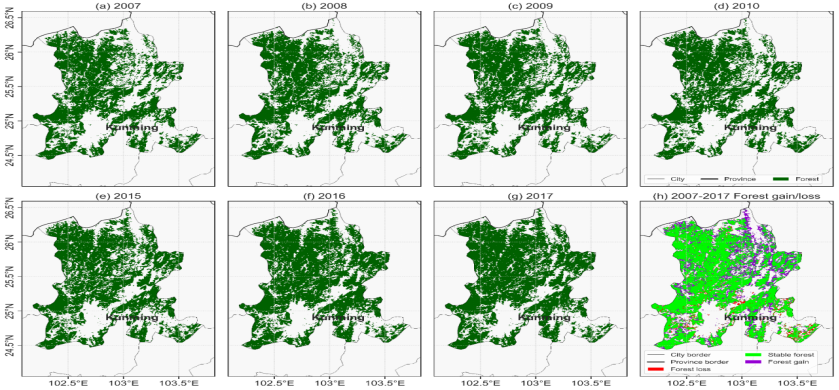
Python-GEE遥感云大数据分析、管理与可视化
Python-GEE遥感云大数据分析、管理与可视化近年来遥感技术得到了突飞猛进的发展,航天、航空、临近空间等多遥感平台不断增加,数据的空间、时间、光谱分辨率不断提高,数据量猛增,遥感数据已经越来越具有大数据特征。遥感大数据的出…...
 | 洛谷 P2731 [USACO3.3]骑马修栅栏 Riding the Fences)
信息学奥赛一本通 1375:骑马修栅栏(fence) | 洛谷 P2731 [USACO3.3]骑马修栅栏 Riding the Fences
【题目链接】 ybt 1375:骑马修栅栏(fence) 洛谷 P2731 [USACO3.3]骑马修栅栏 Riding the Fences 【题目考点】 1. 图论:欧拉回路 欧拉回路存在的条件:图中所有顶点的度都是偶数欧拉路径存在的条件:图中只有两个度为奇数的顶点…...
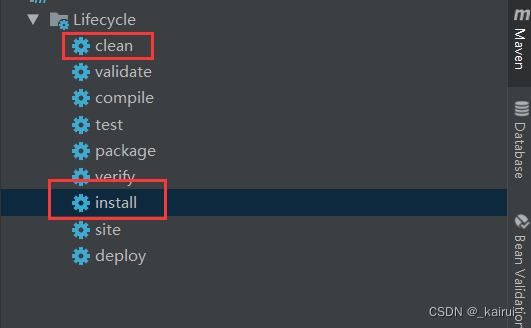
Spring Boot 应用的打包和发布
1. 创建项目(example-fast) 基于 Spring Boot 创建一个 WEB 项目 example-fast。 2. 编译打包 2.1 采用 IDEA 集成的 Maven 环境来对 Spring Boot 项目编译打包,可谓是超级 easy 2.2 mvn 命令打包 # mvn clean 清理编译 # install 打包 #…...

linux:iptables (3) 命令行操练(一)
目录 1.命令行手册查缺补漏 2.开始练习,从最陌生的参数练习开启 2.1 --list-rules -S :打印链或所有链中的规则 2.2 --zero -Z 链或所有链中的零计数器 2.3 --policy -P 修改默认链的默认规则 2.4 --new -N 接下来练习添加和删除自定义链 1.命令行手册查缺补…...
 与synchronized(class) 有啥区别)
synchronized(this) 与synchronized(class) 有啥区别
前言 synchronized(this) 与 synchronized(class) 相同处:均对代码加锁,实现互斥性。synchronized(this) 与 synchronized(class) 区别:作用域不同。 synchronized (this) synchronized(this)使用的是对象锁。this为关键词,表示…...

BOSS直拒、失联招聘,消失的“金三银四”,失业的测试人出路在哪里?
裁员潮涌,经济严冬。最近很多测试人过得并不好,行业缩水对测试岗位影响很直接干脆,究其原因还是测试门槛在IT行业较低,同质化测试人员比较多。但实际上成为一位好测试却有着较高的门槛,一名优秀的测试应当对产品的深层…...

华为OD机试【密室逃生游戏】
密室逃生游戏 题目 小强增在参加《密室逃生》游戏,当前关卡要求找到符合给定 密码 K(升序的不重复小写字母组 成) 的箱子, 并给出箱子编号,箱子编号为 1~N 。 每个箱子中都有一个 字符串 s ,字符串由大写字…...

【Python学习笔记(六)】json解析模块的使用
json解析模块的使用 前言 json 是一种轻量级的数据交换格式,通过对象和数组的组合来表示数据。在 Python3 中可以使用 json 模块来对 json 数据进行编解码。 json 模块 是 Python 标准库模块,无需手动安装,可以直接导入 import json # 导入…...

《Spring系列》第3章 基于注解管理Bean
基于注解方式管理Bean 1.通过注解管理Bean 1) 基础注解 Component Service Controller Repository 2) 基于XML的注解扫描 a> 引入依赖 spring-aop-5.1.5.RELEASE.jarb> 开启组件扫描 最简单的开启注解 <context:component-scan base-package"com.jianan&q…...
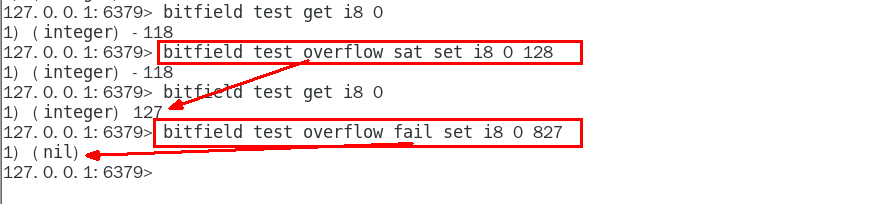
【Redis】十大数据类型(下篇)
文章目录redis位图(bitmap) --- 底子还是string基本命令图示setbit key offset value setbit 键 偏移位 只能零或者1getbit key offset 查看获取字符串长度 strlen统计key中包含1的个数 bitcount keybitop 统计两个比特key是否都为1技术落地:打卡签到,频…...
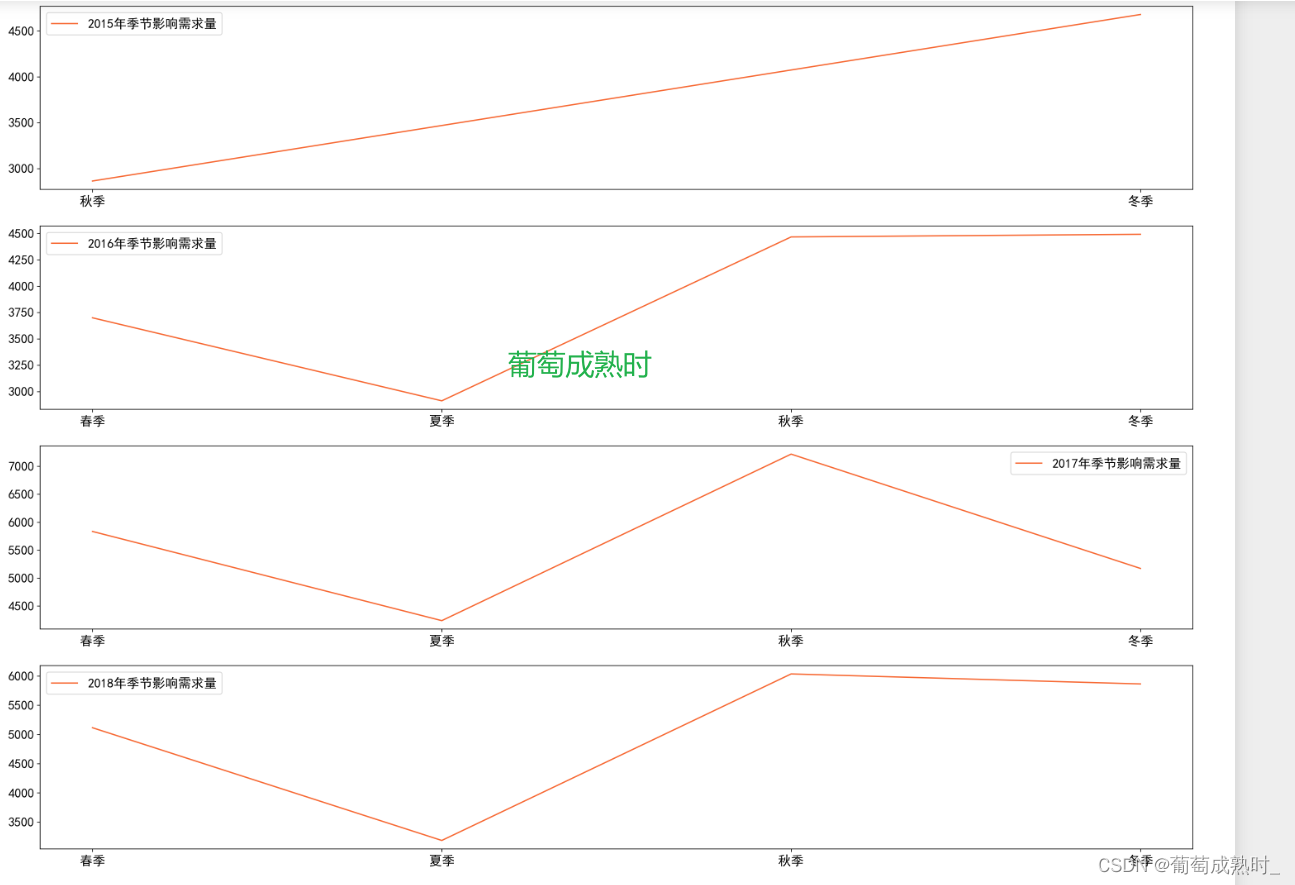
【第十一届“泰迪杯”数据挖掘挑战赛】B题产品订单的数据分析与需求预测“解题思路“”以及“代码分享”
【第十一届泰迪杯B题产品订单的数据分析与需求预测产品订单的数据分析与需求预测 】第一大问代码分享(后续更新LSTMinformer多元预测多变量模型) PS: 代码全写有注释,通俗易懂,包看懂!!!&…...

Python入门到高级【第一章】
预计更新第一章. Python 简介 Python 简介和历史Python 特点和优势安装 Python 第二章. 变量和数据类型 变量和标识符基本数据类型:数字、字符串、布尔值等字符串操作列表、元组和字典 第三章. 控制语句和函数 分支结构:if/else 语句循环结构&#…...

【泰凌微TLSR8258 zigbee】OTA升级操作方法
目录 程序启动模式多地址启动模式Bootloader 启动模式多地址启动模式 Flash 分布Bootloader 启动模式Flash分布模式OTA升级OTA初始化OTA ServerOTA ClientOTA升级固件生成程序启动模式 在介绍OTA升级操作方法前,我们先介绍一下程序的启动模式,以及不同启动模式的优缺点。 多…...

网络基础设施监控
在过去的几十年里,网络基础设施在规模和功能方面都变得复杂起来。不断增长的业务需求和不断增长的技术能力推动了这种快速增长,监控网络基础设施以确保其最佳性能和最大效率已成为任何希望成为行业领跑者的组织不可或缺的优先事项。 什么是网络基础设施…...

OPNET Modeler 例程——创建一个包交换网络
文章目录一、例程简介二、创建新的包格式三、创建新的链路模型四、创建中心交换节点模型五、创建中心交换节点的进程模型六、创建周边节点模型七、创建周边节点进程模块八、创建网络模型九、收集统计量十、配置并仿真总结一、例程简介 本例程将仿真一个简单的包交换网络&#…...

告别单调终端:250+ Xshell配色方案让你的命令行焕然一新
告别单调终端:250 Xshell配色方案让你的命令行焕然一新 【免费下载链接】Xshell-ColorScheme 250 Xshell Color Schemes 项目地址: https://gitcode.com/gh_mirrors/xs/Xshell-ColorScheme 每天面对单调的黑白终端界面,是否感到视觉疲劳ÿ…...

DDrawCompat v0.6.0:终极指南,让经典游戏在现代Windows系统完美重生
DDrawCompat v0.6.0:终极指南,让经典游戏在现代Windows系统完美重生 【免费下载链接】DDrawCompat DirectDraw and Direct3D 1-7 compatibility, performance and visual enhancements for Windows Vista, 7, 8, 10 and 11 项目地址: https://gitcode.…...

别再被Windows Defender误报了!手把手教你用PowerShell自制证书给EXE签名
别再被Windows Defender误报了!手把手教你用PowerShell自制证书给EXE签名 当你在深夜终于完成了一个自研小工具的编译,迫不及待地双击运行时,那个熟悉的红色警告框又弹了出来——"Windows Defender已阻止此程序运行"。作为开发者&…...

RakkasJS深度解析:基于Bun的全栈React框架性能与迁移实践
1. 项目概述:下一代全栈React框架的探索如果你和我一样,在过去几年里深度使用过Next.js、Remix或者SvelteKit这类全栈框架,那你肯定对它们带来的开发体验又爱又恨。爱的是它们统一了前后端,让全栈开发变得前所未有的顺畅ÿ…...

Arm DynamIQ架构缓存一致性协议解析与优化
1. Arm DynamIQ架构中的缓存一致性技术解析在异构计算架构中,缓存一致性协议是确保多核处理器高效协同工作的关键技术。作为Arm体系结构的重要组成部分,DynamIQ共享单元(DSU)通过AMBA ACE和CHI协议实现了灵活的系统级缓存一致性管理。这两种协议虽然设计…...

Linux服务器文件传输服务搭建:从FTP协议到vsftpd实战部署
1. 项目概述:为什么要在Linux上搭建FTP服务器?很多刚接触Linux的朋友,尤其是从Windows转过来的,一提到搭建服务器,特别是像FTP这种“古老”但依然实用的文件传输服务,第一反应可能就是“头大”。在Windows上…...

红米K60澎湃OS解锁进阶:Delta面具Root实战与BL解锁后系统深度定制指南
1. 红米K60澎湃OS解锁Root前的准备工作 拿到一台已经解锁Bootloader的红米K60,想要通过Delta面具获取Root权限,准备工作至关重要。我遇到过不少小伙伴因为前期准备不足,导致刷机过程中出现各种奇怪问题。下面这些步骤都是我实测有效的方案&am…...
)
从“玩原神不”到AC:手把手教你用概率DP解决湘潭邀请赛F题(期望计算避坑指南)
从队友闲聊到AC代码:概率DP在算法竞赛中的实战拆解 "玩原神不~"——这句看似随意的队友闲聊,竟成了解决湘潭邀请赛F题的关键灵感。在算法竞赛中,概率与期望DP问题往往让选手望而生畏,但通过这道题的完整解析࿰…...

Windows本地部署Claude代码助手:架构解析与实战指南
1. 项目概述与核心价值 最近在GitHub上看到一个挺有意思的项目,叫“Claude-code-ChatInWindows”,作者是LKbaba。光看名字,你大概能猜到它想干什么:在Windows系统里,让Claude这个AI来帮你写代码。这听起来是不是挺酷的…...
)
告别Xilinx思维:用Microsemi Libero为SmartFusion FPGA创建你的第一个工程(附资源清单)
告别Xilinx思维:用Microsemi Libero为SmartFusion FPGA创建你的第一个工程(附资源清单) 当习惯了Xilinx Vivado或Intel Quartus的工程师第一次打开Microsemi Libero时,那种感觉就像突然被扔进了一个陌生的城市——所有的路标都似…...