YOLO11项目实战1:道路缺陷检测系统设计【Python源码+数据集+运行演示】
一、项目背景
随着城市化进程的加速和交通网络的不断扩展,道路维护成为城市管理中的一个重要环节。道路缺陷(如裂缝、坑洞、路面破损等)不仅影响行车安全,还会增加车辆的磨损和维修成本。传统的道路缺陷检测方法主要依赖人工巡检,这种方法效率低下且容易遗漏。因此,利用先进的计算机视觉技术进行自动化的道路缺陷检测成为了研究热点。
YOLO (You Only Look Once) 是一种基于深度学习的目标检测算法,以其快速而准确的特点在多个领域得到广泛应用。YOLO11是YOLO系列的一个改进版本,它在保持高效性的同时,进一步提升了检测精度。本项目旨在开发一个基于YOLO11的道路缺陷检测系统,以实现对道路缺陷的自动化检测,提高检测效率和准确性。
二、运行演示
为了更好地展示YOLO11道路缺陷检测系统的实际效果,我们录制了一段视频演示。在视频中,我们可以看到该系统如何处理一段包含多种道路缺陷的视频片段,并实时标注出检测到的缺陷位置。

Yolo11道路缺陷检测识别运行演示1
三、工作流程
- 数据准备:首先,我们需要收集大量的道路图像或视频数据,并对其进行标注。标注包括标记出各种道路缺陷的位置和类型,例如裂缝、坑洞等。
- 模型训练:使用标注好的数据集来训练YOLO11模型。通过调整超参数和优化网络结构,确保模型能够准确地识别出不同类型的道路缺陷。
- 实时检测:将训练好的模型部署到实际环境中,对输入的视频流进行实时处理。系统会逐帧分析视频,识别并标注出每一帧中的道路缺陷。
- 结果显示:检测结果会在视频上以红色边框的形式显示出来,同时还可以输出详细的报告,记录每种缺陷的数量和位置信息。
四、关键技术
1. YOLO11算法概述
YOLO11是一种单阶段目标检测算法,其核心思想是将整个图像划分为多个网格,每个网格负责预测固定数量的边界框及其对应的类别概率。相比于两阶段检测器(如Faster R-CNN),YOLO11具有更快的推理速度,适合于实时应用场景。
2. 数据增强
由于道路缺陷样本可能存在不平衡的问题,即某些类型的缺陷可能较少见,因此需要通过数据增强技术来扩充数据集。常用的数据增强方法包括随机旋转、翻转、缩放和平移等操作,这些操作可以增加模型的泛化能力。
3. 模型优化
为了进一步提升YOLO11在道路缺陷检测任务上的性能,我们采用了一些优化策略:
- 骨干网络改进:使用更强大的骨干网络(如EfficientNet, ResNet等)来提取特征。
- 多尺度特征融合:结合不同层次的特征图,使得模型能够捕捉到不同尺度的目标。
- 损失函数调整:针对道路缺陷的特点,调整分类损失和回归损失的权重,以平衡不同类型缺陷的检测效果。
4. 实时处理
为了保证系统能够在实际应用中实现实时处理,我们采取了以下措施:
- 硬件加速:利用GPU进行模型推理,显著加快处理速度。
- 模型剪枝:去除冗余的网络层和参数,减少计算量。
- 批量处理:对连续多帧进行批处理,提高整体吞吐量。
五、部分核心代码
from ultralytics import YOLO
import cv2# 加载模型
model = YOLO("../chkpts/last.pt") # 加载预训练模型(推荐用于训练)# 打开输入视频文件
input_video_path = "../inputs/006.mp4"
cap = cv2.VideoCapture(input_video_path)# 获取视频属性
frame_width = int(cap.get(cv2.CAP_PROP_FRAME_WIDTH))
frame_height = int(cap.get(cv2.CAP_PROP_FRAME_HEIGHT))
fps = cap.get(cv2.CAP_PROP_FPS)
fourcc = cv2.VideoWriter_fourcc(*'mp4v') # 设置输出视频编码器为H.264# 创建输出视频文件
output_video_path = "../outputs/006_v1.mp4"
out = cv2.VideoWriter(output_video_path, fourcc, fps, (frame_width, frame_height))while cap.isOpened():ret, frame = cap.read()if not ret:break # 如果没有更多帧可读,则退出循环# 对当前帧执行对象检测results = model(frame)# 绘制检测结果到帧上annotated_frame = results[0].plot()cv2.imshow('YOLO Detection', annotated_frame)# 按 'q' 键退出if cv2.waitKey(1) & 0xFF == ord('q'):break# 将标注后的帧写入输出视频out.write(annotated_frame)# 释放资源
cap.release()
out.release()print(f"Processed video saved to {output_video_path}")六、总结:
YOLO11道路缺陷检测系统通过结合高效的YOLO11算法和先进的计算机视觉技术,实现了对道路缺陷的自动化检测。该系统不仅提高了检测效率,还大大降低了人工巡检的成本和时间。通过对大量数据的训练和优化,系统能够准确地识别出多种类型的道路缺陷,并在实时视频流中进行标注。
未来的工作方向包括:
模型进一步优化:探索更多的模型架构和优化方法,以进一步提升检测精度。
多传感器融合:结合其他传感器(如激光雷达)的数据,提高系统的鲁棒性和准确性。
大规模部署:将系统部署到更多城市和地区,为城市道路维护提供强有力的支持。
总之,YOLO11道路缺陷检测系统为道路维护提供了新的解决方案,有望在未来的城市管理中发挥重要作用。
相关文章:
YOLO11项目实战1:道路缺陷检测系统设计【Python源码+数据集+运行演示】
一、项目背景 随着城市化进程的加速和交通网络的不断扩展,道路维护成为城市管理中的一个重要环节。道路缺陷(如裂缝、坑洞、路面破损等)不仅影响行车安全,还会增加车辆的磨损和维修成本。传统的道路缺陷检测方法主要依赖人工巡检…...

怎么屏蔽统计系统统计到的虚假ip
屏蔽统计系统中的虚假IP是保护网站分析数据准确性的重要措施。以下是一些有效的策略和步骤,可以帮助您过滤掉虚假IP: 1. 识别虚假IP的特征 了解虚假IP的常见特征可以帮助您识别和屏蔽它们: 短时间内高频率访问:虚假IP可能会在短…...

前端开发设计模式——策略模式
目录 一、策略模式的定义和特点 1.定义: 2.特点: 二、策略模式的实现方式 1.定义策略接口: 2.创建具体策略类: 3.定义上下文类: 三、策略模式的应用场景 1.表单验证场景: 2.动画效果切换场景&…...
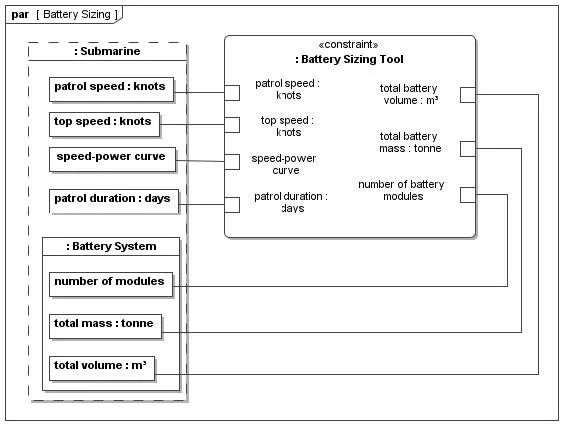
SysML案例-潜艇
DDD领域驱动设计批评文集>> 《软件方法》强化自测题集>> 《软件方法》各章合集>>...

车辆重识别(2020NIPS去噪扩散概率模型)论文阅读2024/9/27
[2] Denoising Diffusion Probabilistic Models 作者:Jonathan Ho Ajay Jain Pieter Abbeel 单位:加州大学伯克利分校 摘要: 我们提出了高质量的图像合成结果使用扩散概率模型,一类潜变量模型从非平衡热力学的考虑启发。我们的最…...

基于深度学习的任务序列中的快速适应
基于深度学习的任务序列中的快速适应是指模型在接连处理不同任务时,能够迅速调整和优化自身以适应新任务的能力。这种能力在动态环境和多任务学习中尤为重要,旨在减少训练时间和资源需求。以下是这一主题的关键要素: 1. 快速适应的背景 动态…...

虚拟机三种网络模式详解
在电脑里开一台虚拟机,是再常见不过的操作了。无论是用虚拟机玩只有旧版本系统能运行的游戏,还是用来学习Linux、跑跑应用程序都是很好的。而这其中,虚拟机网络是绝对绕不过去的。本篇文章通俗易懂的介绍了常见的虚拟网络提供的三种网络链接模…...

[leetcode]674_最长连续递增序列
给定一个未经排序的整数数组,找到最长且 连续递增的子序列,并返回该序列的长度。 连续递增的子序列 可以由两个下标 l 和 r(l < r)确定,如果对于每个 l < i < r,都有 nums[i] < nums[i 1] &am…...
【无人机设计与技术】四旋翼无人机,UAV仿真,轨迹跟踪PID控制
摘要 本文探讨了四旋翼无人机(UAV)在轨迹跟踪中的PID控制仿真方法。通过设计三轴方向的PID控制器,调节无人机的姿态与位置,使其能够准确跟踪预设轨迹。本文使用MATLAB/Simulink进行了建模与仿真,验证了PID控制算法在无…...

回归预测|基于卷积神经网络-支持向量机的数据回归预测Matlab程序CNN-SVM 卷积提取特征与原始特征进行融合预测
回归预测|基于卷积神经网络-支持向量机的数据回归预测Matlab程序CNN-SVM 卷积提取特征与原始特征进行融合预测 文章目录 一、基本原理原理流程总结 二、实验结果三、核心代码四、代码获取五、总结 回归预测|基于卷积神经网络-支持向量机的数据回归预测Matlab程序CNN-SVM 卷积提…...

javaScript基础知识汇总
一、基础语法 1、区分大小写:无论是变量、函数名还是操作符,都区分大小写。 2、标识符:就是变量、函数、属性或函数参数的名称。标识符可以由一个或多个字符构成,但需要满足以下条件: 第一个字符必须是一个字母、下…...

《动手学深度学习》笔记2.2——神经网络从基础→进阶 (参数管理-每层的权重/偏置)
目录 0. 前言 正文:参数管理 1. 参数访问 1.1 [目标参数] 1.2 [一次性访问所有参数] 1.3 [从嵌套块收集参数] 2. 参数初始化 2.1 [内置初始化] 2.2 [自定义初始化] 2.3 [参数绑定-共享参数] 3. 小结(第2节) 4. 延后初始化 (原书第…...

双端之Nginx+Php结合PostgreSQL搭建Wordpress
第一台虚拟机:安装 Nginx 更新系统包列表: sudo apt update安装 Nginx及php扩展: sudo apt install nginx php-fpm php-pgsql php-mysqli -y启动 Nginx 服务: sudo systemctl start nginx检查 Nginx 是否正常运行: xdg-open http://localhost注意:终端命令打开网址 …...

Another redis desktop manager使用说明
Another redis desktop manager使用说明 概述界面介绍图示说明连接界面设置界面查看操作日志主界面信息进入redis-cli控制台更多 概述 Another Redis Desktop Manager是一个开源的跨平台 Redis 客户端,提供了简洁易用的图形用户界面(GUI)&am…...

【git】配置 Git 的换行符处理和安全性||安装 Ruby
配置 Git 的换行符处理和安全性: git config --global core.autocrlf input:这个设置确保在提交代码时,Git 会将 CRLF(Windows 的换行符)转换为 LF(Unix 的换行符),但在检出代码时不…...

VMware ESXi 8.0U3b macOS Unlocker OEM BIOS 2.7 Dell HPE 定制版 9 月更新发布
VMware ESXi 8.0U3b macOS Unlocker & OEM BIOS 2.7 Dell HPE 定制版 9 月更新发布 VMware ESXi 8.0U3b macOS Unlocker & OEM BIOS 2.7 标准版和厂商定制版 ESXi 8.0U3 标准版,Dell (戴尔)、HPE (慧与)、Lenovo (联想)、IEIT SYSTEMS (浪潮信息)、Cisco …...

Unity 代码裁剪(Strip Engine Code)
文章目录 0.IL2CPP 打包运行闪退问题1.什么是代码裁剪2.为什么要使用代码裁剪3.代码裁剪设置与级别4.强制保留代码4.1 使用[Preserve]标签4.2 使用Link.xml文件 5.Strip中遇到的问题及解决方法6.注意事项 0.IL2CPP 打包运行闪退问题 Google Play要求从2019年8月1日起apk必须支…...

单目3d重建DUSt3R 笔记
目录 DUSt3R 三维重建 报错RecursionError: maximum recursion depth exceeded in comparison 报错 numpy.core.multiarray failed to import 报错Numpy is not available 解决 升级版mast3r 速度变慢 修改了参数设置脚本: 测试效果 操作技巧 DUSt3R 三维重…...

AI驱动TDSQL-C Serverless 数据库技术实战营-与AI的碰撞
目录 一、简介 二、实验介绍 三、结果展示 四、实操指导 4.1 系统设计 4.2 环境搭建(手把手教程) 4.3 应用构建 4.4 效果展示 4.5 踩坑避雷总结 五、清理资源 5.1 删除TDSQL-C Serverless 5.2 删除 HAI 算力 六、实验总结归纳 一、简介 本…...

C++之String类(上)
片头 嗨!好久不见~ 今天我们来学习C的Sting类,不过,在学习它之前,我们先来对STL库有一个简单的了解。 STL(standard template library--标准模板库),是C标准库的重要组成部分,不仅是…...

大数据量存储终极指南:10个高效数据分片技巧
大数据量存储终极指南:10个高效数据分片技巧 【免费下载链接】til :memo: Today I Learned 项目地址: https://gitcode.com/gh_mirrors/ti/til 在当今数据爆炸的时代,高效处理和存储海量数据已成为企业技术架构的核心挑战。数据分片作为一种关键的…...

ThunderAI:开箱即用的桌面AI助手,聚合Ollama与多模型应用实战
1. 项目概述:一个开箱即用的AI助手桌面应用最近在折腾本地AI应用的时候,发现了一个挺有意思的项目,叫ThunderAI。这名字听着就挺带劲,像一道闪电,主打的就是一个“快”和“直接”。简单来说,它就是一个基于…...

[具身智能-653]:人的大脑神经网络就是天然的模拟电路,还是数字电路?
结论先给:人脑神经网络,本质是【天然模拟电路】,不是数字电路这和前面聊的模拟电路频域特性、硬件隐式频域滤波完全同逻辑。一、先分清:数字电路 vs 模拟电路 核心区别数字电路只有0、1两种离散电平,跳变是阶跃式&…...

免费在线PPT制作工具PPTist:浏览器中的专业演示文稿创作平台
免费在线PPT制作工具PPTist:浏览器中的专业演示文稿创作平台 【免费下载链接】PPTist PowerPoint-ist(/pauəpɔintist/), An online presentation application that replicates most of the commonly used features of MS PowerPoint, allow…...

长裕集团上交所上市:大涨562%市值375亿 年营收18亿净利2.6亿
雷递网 雷建平 5月11日 长裕控股集团股份有限公司(简称:“长裕集团”,股票代码:“603407”)今日在上交所主板上市。长裕集团发行价为13.86元,发行4100万股,募资总额为5.68亿元。长裕集团今日开盘…...

【其他】Obsidian笔记Remotely Save插件中国科技云数据胶囊 配置免费的笔记同步
目录 一 注册中国科技云数据胶囊 二 插件下载 & 配置 三 同步测试 一 注册中国科技云数据胶囊 【1】搜索“中国科技云”,找到“数据胶囊”选项,实名注册可以领取20G的容量: 【2】选择“新数据空间”,输入库的标题…...

Deep SORT:如何用深度关联度量实现95%+准确率的实时多目标追踪?
Deep SORT:如何用深度关联度量实现95%准确率的实时多目标追踪? 【免费下载链接】deep_sort Simple Online Realtime Tracking with a Deep Association Metric 项目地址: https://gitcode.com/gh_mirrors/de/deep_sort 在计算机视觉领域ÿ…...
)
别再死记硬背了!用一块74283芯片搞定所有BCD码转换(附实战练习题)
用74283芯片玩转BCD码转换:从原理到实战的终极指南 在数字电路设计与计算机组成原理的学习中,BCD码转换一直是让许多学生头疼的"拦路虎"。传统的死记硬背方法不仅效率低下,更无法应对考试中千变万化的题型。本文将彻底改变这一现状…...

Wireshark解密不止于IPSec:一份TLS/SSL、HTTPS、SSH等常见加密协议的解密指南
Wireshark解密不止于IPSec:一份TLS/SSL、HTTPS、SSH等常见加密协议的解密指南 当你面对一个加密的网络流量时,是否曾感到无从下手?无论是调试HTTPS API调用、分析SSH连接问题,还是研究QUIC协议的行为,加密流量总是像一…...

零命令行部署飞书AI机器人:桌面应用实现开箱即用
1. 项目概述:一个为普通人设计的飞书AI机器人桌面应用 如果你在飞书里用过官方提供的“AI助手”,可能会觉得它功能不错,但总有些限制——不能自由选择模型,无法深度定制,更别提把它无缝集成到你的工作流里了。于是&am…...