STM32输出PWM波控制电机转速,红外循迹避障智能车+L298N的详细使用手册、接线方法及工作原理,有代码
智能循迹红外避障小车
本设计的完整的系统主要包括STM32单片机最小系统、L298n电机驱动,超声波 ,舵机 ,红外模块等。寻迹小车相信大家都已经耳熟能祥了。
我们在这里主要讲一下L298N驱动电机和单片机输出PWM控制电机转速。
本设计软件系统采用模块设计思想,采用C语言作为程序设计语言,通过KEI MDK完成程序设计,使用仿真器下载软件完成程序的烧录和在线调试。
1.采用C8T6开发板,这个板子我只能说性价比无敌。
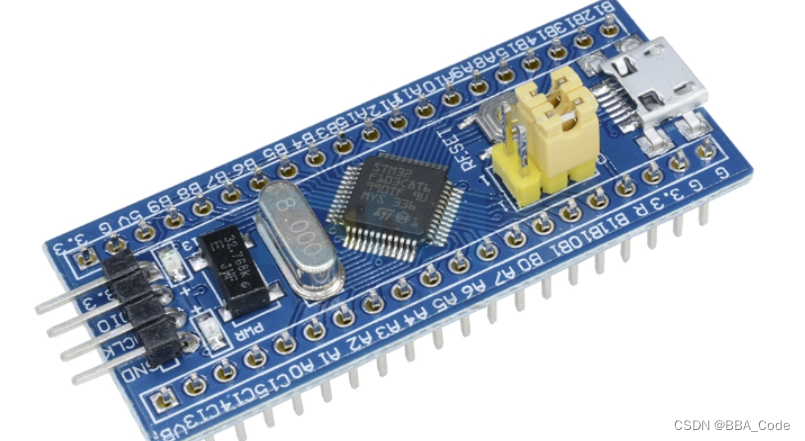
STM32F103C8T6是一个中密度性能线,配有ARM Cortex-M3 32位微控制器,48路LQFP封装.它结合了高性能的RISC内核,运行频率可达72MHz,以及高速内嵌存储器,增强范围的强化输入/输出和外部连接至两个APB总线.STM32F103C8T6具有12位模数转换器,4个计时器,3个串口等等。
2.电机驱动模块,当时看有人用这个 我也买了。后来很多人反映以及我在使用过程中,发现L298N不算是那么好用。
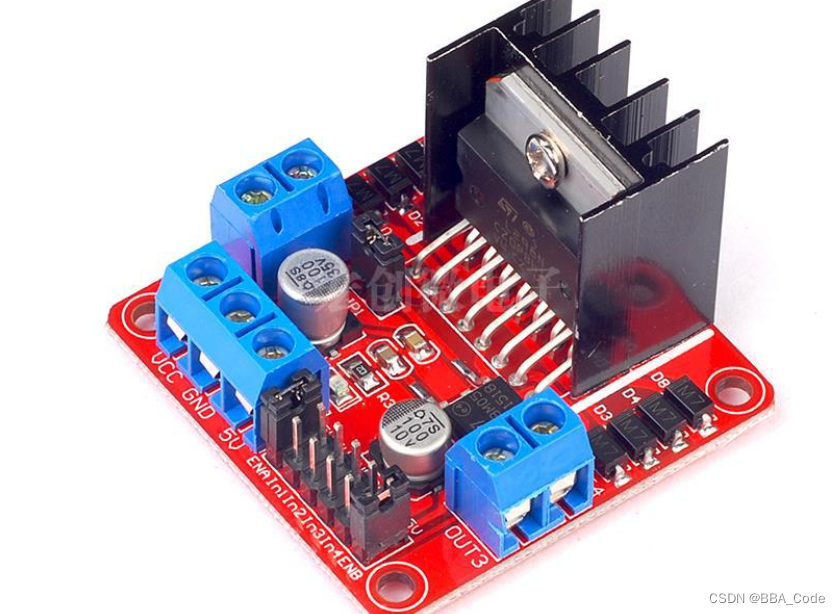
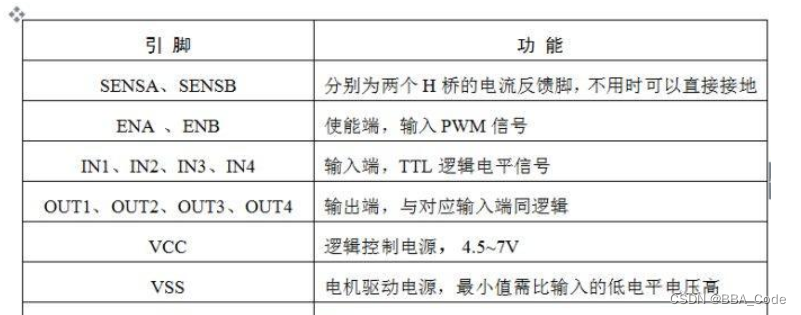
L298N我也只是在这个简单的小车上用一下这个模块,做别的一般不推荐这个,推荐TB6612等。对于L298N的讲解此网站上有很多 我只能说讲的好的每一个,我初次找L298N的资料时,真的被搞的迷迷糊糊,怎么说的都有,服了。我再次为大家讲解明白。
L298N双通道输出,输出A与输出B
供电方式 :12V供电,左下角三个接口,最左边为12V输入,中间为GND引脚,右边是5v输出(要将上面跳线帽连接)
如果输入大于12v要将上面跳线帽拔掉!!!
通道输出:
1.不考虑电机调速:使能ENA、ENB置于高电平,直接对N1、N2、N3、N4接入高低电平
(电机以最快速度转动)---------------------------------没办法调整左右轮速度
2.考虑电机调速:ENA和ENB接单片机的PWM波输出引脚!别被其他文章搞混了。
IN1,IN2,IN3,IN4按章上面的接法控制方向。就这么简单。别好多人讲的迷迷糊糊。
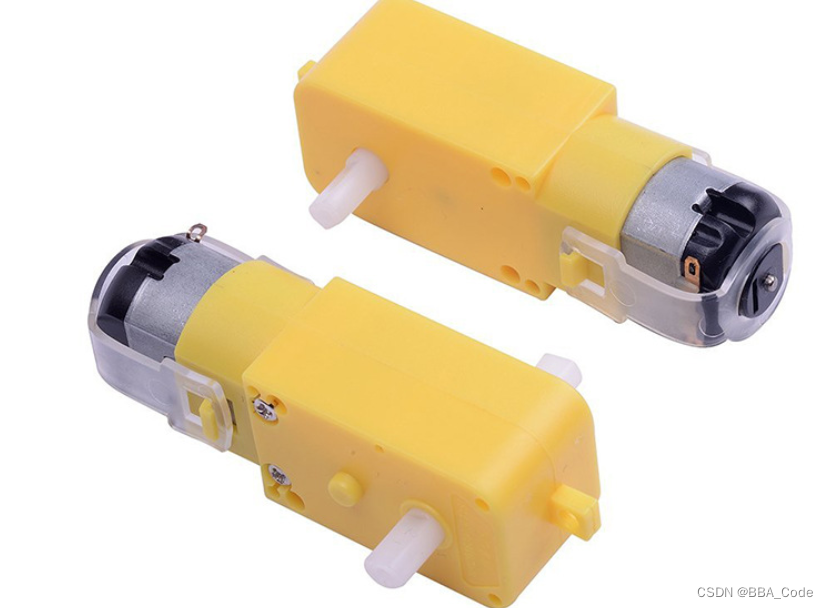
这里采用这种简单的减速小马达减速比好像是1:48,童年回忆哈哈哈哈。
bsp_pwm.c
#include "bsp_pwm.h"
//PWM输出初始化
//arr:自动重装值
//psc:时钟预分频数
//TIM1_PWM_Init(7199,0);//PWM频率=72000/(7199+1)=10Khz
void TIM1_PWM_Init(u16 arr,u16 psc)
{ GPIO_InitTypeDef GPIO_InitStructure;TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; //时基单元配置TIM_OCInitTypeDef TIM_OCInitStructure; //tim定时器输出模式结构体RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE);// RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA , ENABLE); //使能GPIO外设时钟使能//设置该引脚为复用输出功能,输出TIM1 CH1 CH4的PWM脉冲波形GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8|GPIO_Pin_11; //TIM_CH1 //TIM_CH4GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure);TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值 TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值 不分频TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_timTIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式TIM_TimeBaseInit(TIM1, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //选择定时器模式:TIM脉冲宽度调制模式1TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能TIM_OCInitStructure.TIM_Pulse = 0; //设置待装入捕获比较寄存器的脉冲值TIM_OCInitStructure.TIM_Pulse = arr >> 1;TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高TIM_OC1Init(TIM1, &TIM_OCInitStructure); //根据TIM_OCInitStruct中指定的参数初始化外设TIMxTIM_OC4Init(TIM1, &TIM_OCInitStructure); //根据TIM_OCInitStruct中指定的参数初始化外设TIMxTIM_CtrlPWMOutputs(TIM1,ENABLE); //MOE 主输出使能 高级定时器输出PWM波特殊配置TIM_OC1PreloadConfig(TIM1, TIM_OCPreload_Enable); //CH1预装载使能 TIM_OC4PreloadConfig(TIM1, TIM_OCPreload_Enable); //CH4预装载使能 TIM_ARRPreloadConfig(TIM1, ENABLE); //使能TIMx在ARR上的预装载寄存器TIM_Cmd(TIM1, ENABLE); //使能TIM1
}bsp_pwm.h
#ifndef __PWM_H
#define __PWM_H#include "sys.h"void TIM1_PWM_Init(u16 arr,u16 psc);#endifmain.c
#include "sys.h" //这个文件有点基础的都懂吧 不懂私信我/*** @brief 主函数* @param 无* @retval 无*/ #define SOFT_DELAY Delay(0x0FFFFF);void Delay(__IO u32 nCount); int main(void)
{ delay_init();/* LED端口初始化 */LED_GPIO_Config();TIM1_PWM_Init(99,71);//72+100/72000Motor_Init();LED2_ON;//我习惯在都初始化后亮个灯表示一下。while(1){LED2_ON;delay_ms(500);LED2_OFF;;advance();delay_ms(3000);retreat();delay_ms(3000);left();delay_ms(3000);right();delay_ms(3000);stop();}bsp_motor.c
#include "bsp_motor.h"void Motor_Init(void)
{GPIO_InitTypeDef GPIO_InitStructure;RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //使能PB端口时钟GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12|GPIO_Pin_13|GPIO_Pin_14|GPIO_Pin_15; //端口配置GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //50MHZGPIO_Init(GPIOB, &GPIO_InitStructure); //根据设定参数初始化GPIOB AIN1=0,AIN2=0;BIN1=0,BIN2=0;
}
void stop(void)
{
TIM_SetCompare1(TIM1, 0);
TIM_SetCompare4(TIM1, 0 );AIN1=0,AIN2=0;BIN1=0,BIN2=0;
}
void advance(void)
{PWM1=100;PWM4=100;
//TIM_SetCompare1(TIM1, 100);
//TIM_SetCompare4(TIM1, 100 );AIN1=1,AIN2=0;BIN1=1,BIN2=0;
}void retreat(void)
{PWM1=100;PWM4=100;AIN1=0,AIN2=1;BIN1=0,BIN2=1;
}void right(void)
{PWM1=100;PWM4=100;AIN1=0,AIN2=1;BIN1=1,BIN2=0;
}
void left(void)
{PWM1=100;PWM4=100;AIN1=1,AIN2=0;BIN1=0,BIN2=1;
}bsp_motor.h
#ifndef __BSP_MOTOR_H
#define __BSP_MOTOR_H#include "sys.h"#define PWM1 TIM1->CCR1 //PA8#define PWM4 TIM1->CCR4 //PA11#define AIN2 PBout(13)
#define AIN1 PBout(12)
#define BIN1 PBout(14)
#define BIN2 PBout(15)void Motor_Init(void);void stop(void);
void advance(void);
void retreat(void);
void left(void);
void right(void);#endif /*__BSP_MOTOR_H*/相关文章:
STM32输出PWM波控制电机转速,红外循迹避障智能车+L298N的详细使用手册、接线方法及工作原理,有代码
智能循迹红外避障小车 本设计的完整的系统主要包括STM32单片机最小系统、L298n电机驱动,超声波 ,舵机 ,红外模块等。寻迹小车相信大家都已经耳熟能祥了。 我们在这里主要讲一下L298N驱动电机和单片机输出PWM控制电机转速。 本设计软件系统采…...

3、AI的道德性测试
AI的道德性 AI系统的道德性如何保障是一个重要而复杂的问题,涉及到人工智能的发展、应用、监管、伦理、法律等多个方面。保障AI系统的道德性是一个很重要的问题,因为AI系统不仅会影响人类的生活和工作,也会涉及人类的价值观和伦理道德原则。针对这部分,也需要测试AI系统是…...

银行数字化转型导师坚鹏:银行业务需求分析师技能快速提升之道
银行业务需求分析师技能快速提升之道 ——以推动银行战略目标实现为核心,实现知行果合一课程背景: 很多银行都在开展业务需求分析工作,目前存在以下问题急需解决:不知道银行业务需求分析师掌握哪些关键知识?不清楚…...

C++IO流
文章目录一、CIO流体系二、C标准IO流三、C文件IO流1.ifstream2.ofstream一、CIO流体系 C流是指信息从外部输入设备向计算机内部输入,从内存向外部输出设备输出的过程,这种输入输出的过程非常形象地被称为流的概念。IO流指的就是输入输出流。 我们平时对…...
交友项目【后端环境搭建】
目录 1:环境搭建 1.1:MYSQL数据库 1.1.1:导入相应的sql 1.2:Linux中的docker-compose方法集中部署 1.2.1:介绍 1.3:IDEA设置 1.3.1:基本要求 1.3.2:设置项目编码格式 1.3.3&…...

大事务问题解决方案
文章目录 大事务引发的问题解决办法少用@Transactional注解将查询(select)方法放到事务外事务中避免远程调用事务中避免一次性处理太多数据非事务执行异步处理总结大事务引发的问题 1、死锁 2、回滚时间长 3、并发情况下数据库连接池被占满 4、锁等待 5、接口超时 6、数据库主…...
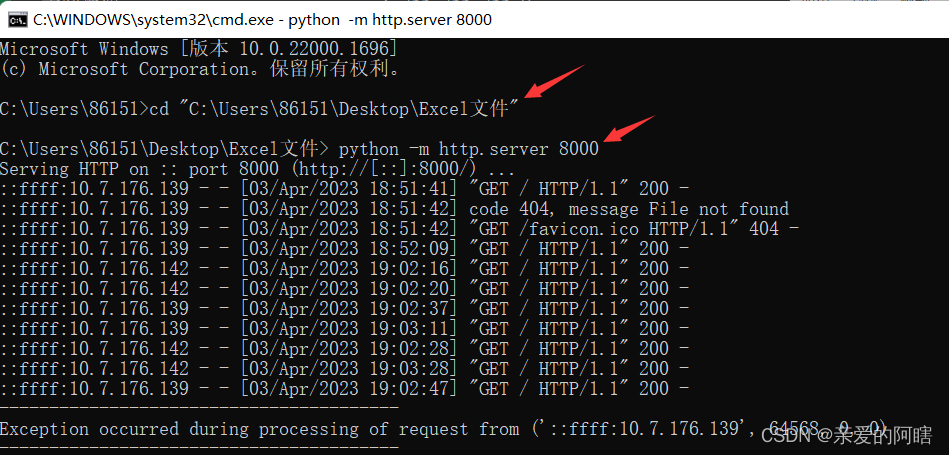
python开启局域网传输
python开启局域网传输 1.找自己的IP 在命令提示窗口输入:ipconfig <----找自己的IP地址 2.创建要传输文件的文件夹(只允许在该文件夹下访问传输) a.复制文件夹路径 b.在命令提示窗口cd打开新创建的文件夹 cd “C:\Users\86151\Desktop…...

病毒丨熊猫烧香病毒分析
作者丨黑蛋 一、病毒简介 病毒名称: 熊猫烧香 文件名称: 40fee2a4be91d9d46cc133328ed41a3bdf9099be5084efbc95c8d0535ecee496 文件格式: EXEx86 文件类型(Magic): MS-DOS executable 文件大小: 29.30KB SHA256&…...

SparkSQL学习——SparkSQL配置与文件的读取与保存
目录 一、添加依赖 二、配置log4j 三、spark提交jar包 四、读取文件 (一)加载数据 (二)保存数据 1.Parquet 2.json 3.CSV 4.MySql 5.hive on spark 6.IDEA的Spark中操作Hive 一、添加依赖 <properties><project.build.sourceEncoding>UTF-8</proje…...
, 322. 零钱兑换, 279.完全平方数)
随想录Day45--动态规划:70. 爬楼梯 (进阶), 322. 零钱兑换, 279.完全平方数
70爬楼梯这道题之前已经做过,是动态规划思想的入门,想要爬上第n层阶梯,看爬上n-1层的方法和n-2层的方法共有多少种,两个相加就是爬上n层阶梯的方法。这里扩展到每次可以爬k层,这样就是一个动态规划问题。因为每次可以爬…...

原理+案例,关于主从延迟,一篇文章给你讲明白!
前言 在生产环境中,为了满足安全性,高可用性以及高并发等方面的需求,基本上采用的MySQL数据库架构都是MHA、MGR等,最低也得是一主一从的架构,搭配自动切换脚本,实现故障自动切换。 上述架构都是通过集群主…...
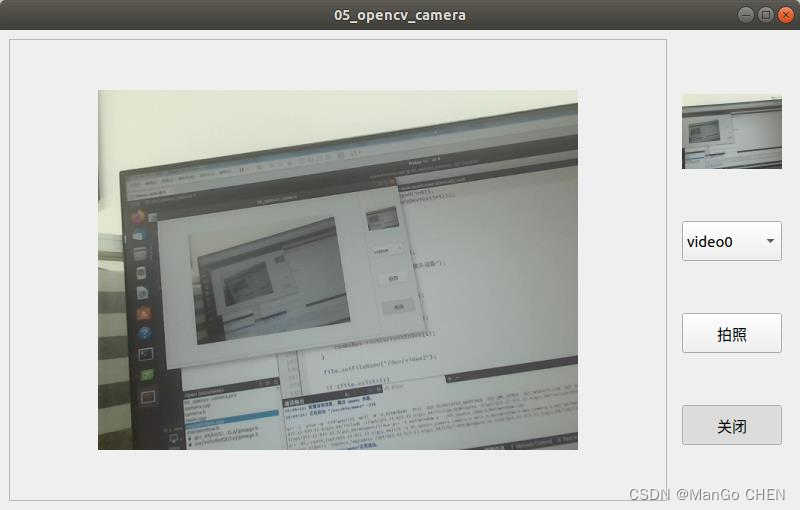
QT开发笔记(Camera)
Camera 此章节例程适用于 Ubuntu 和正点原子 I.MX6U 开发板,不适用于 Windows(需要自行修改 才能适用 Windows,Windows 上的应用不在我们讨论范围)! 资源简介 正点原子 I.MX6U 开发板底板上有一路“CSI”摄像头接口。支持正点原…...
从C++的角度讲解C#容器
讲解C#容器的文章网上一搜一大把,作为一名C程序员如何高效学习C#容器呢,其实学语言如果能讲到这点就能触类旁通,举一反三,那效果是最好的问题市面上没有这样的书籍,那就跟着老白来一起从C的角度去讲解C#容器1.List<…...

React组件库实践:React + Typescript + Less + Rollup + Storybook
背景 原先在做低代码平台的时候,刚好有搭载React组件库的需求,所以就搞了一套通用的React组件库模版。目前通过这套模板也搭建过好几个组件库。 为了让这个模板更干净和通用,我把所有和低代码相关的代码都剔除了,只保留最纯粹的…...

c++ atomic
文章目录why atomic?sequentially consistent atomicRelaxed memory modelswhy atomic? 当我们有一片内存空间S,线程A正在往S里写数据,这个时候线程B突然往S中做了操作,导致线程A的操作结果变得不可预知(对线程A来说),这种情况换句话说叫做data race,我们一般的操作时上锁,在…...
要想孩子写作文没烦恼?建议家长这样做
说起语文学习,就不得不提作文。作为语文学习中的重中之重,作文写作一直是压在学生和家长身上的一块“心头大石”。发现很多孩子在写作文时,往往存在四大问题:写不出、不生动、流水账、太空洞。如今,孩子怕写作文&#…...
基于Python的高光谱图像分析教程
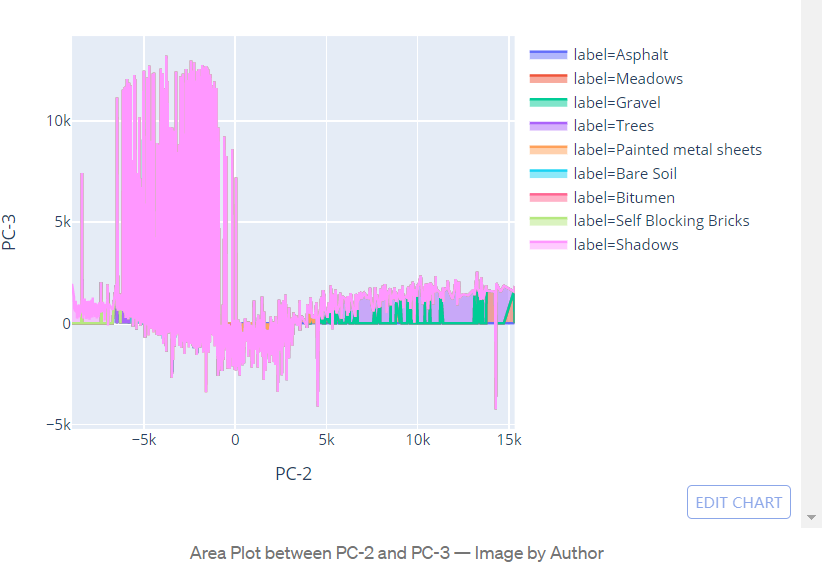
1、前言超光谱图像 (HSI) 分析因其在从农业到监控的各个领域的应用而成为人工智能 (AI) 研究的前沿领域之一。 该领域正在发表许多研究论文,这使它变得更加有趣! 和“对于初学者来说,在 HSI 上开始模式识别和机器学习是相当麻烦的”ÿ…...
【图神经网络】从0到1使用PyG手把手创建异构图
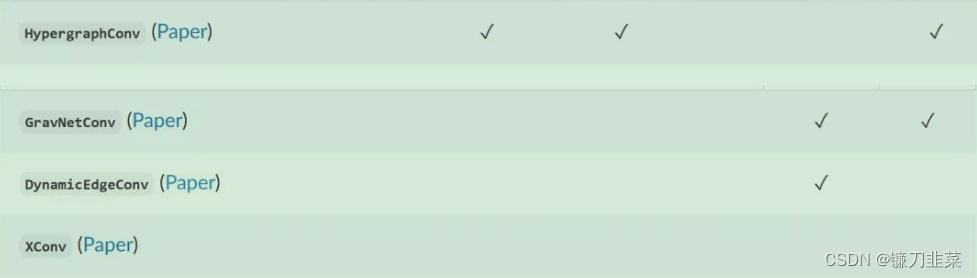
从0到1用PyG创建异构图异构图创建异构图电影评分数据集MovieLens建立二分图数据集转换为可训练的数据集建立异构图神经网络以OGB数据集为例HeteroData中常用的函数将简单图神经网络转换为异质图神经网络GraphGym的使用PyG中常用的卷积层参考资料在现实中需要对 多种类型的节点以…...
2023美赛春季赛思路分析汇总
将在本帖更新汇总2023美赛春季赛两个赛题思路,大家可以点赞收藏! 2023美赛春季赛各赛题全部解题参考思路资料模型代码等全部实时更新!第一时间获取全部美赛春季赛相关资料! 目前思路整理仅为部分,请大家耐心等待&…...

GPT4国内镜像站
GPT-4介绍GPT-4是OpenAI发布的最先进的大型语言模型,是ChatGPT模型的超级进化版本。与ChatGPT相比,GPT-4的推理能力、复杂问题的理解能力、写代码能力得到了极大的强化,是当前人工智能领域,最有希望实现通用人工智能的大模型。但G…...

探索下一代命令行界面:OpenCLI 架构设计与插件化实践
1. 项目概述:一个面向未来的命令行界面原型最近在开源社区里,我注意到一个名为sys-fairy-eve/nightly-mvp-2026-03-19-opencli的项目。这个标题信息量不小,它不像一个成熟的产品,更像是一个开发过程中的里程碑快照。sys-fairy-eve…...

基于MCP协议构建AI编程助手:unloop-mcp文件系统服务器实战指南
1. 项目概述:一个面向开发者的“解循环”MCP服务器最近在GitHub上看到一个挺有意思的项目,叫Escapepaleolithic247/unloop-mcp。光看这个名字,可能有点摸不着头脑,但如果你是一个经常和AI助手(比如Claude、Cursor等&am…...

终极网络资源下载神器:面向内容创作者的5步实战指南
终极网络资源下载神器:面向内容创作者的5步实战指南 【免费下载链接】res-downloader 视频号、小程序、抖音、快手、小红书、直播流、m3u8、酷狗、QQ音乐等常见网络资源下载! 项目地址: https://gitcode.com/GitHub_Trending/re/res-downloader 你是否曾为保…...

Flutter桌面端窗口控制:从隐藏标题栏到自定义全屏交互
1. 为什么需要自定义窗口控制? 当你用Flutter开发Windows桌面应用时,系统默认的标题栏和窗口样式往往显得格格不入。想象一下,你精心设计了一套深色主题的UI,结果顶部突然冒出一条灰白色的标准标题栏——就像给西装革履的绅士戴了…...

安卓客户端架构解析:从MVVM到网络通信的完整实践
1. 项目概述:一个面向安卓设备的智能客户端最近在整理手头的开源项目时,发现了一个挺有意思的仓库,名字叫TOM88812/xiaozhi-android-client。光看这个标题,你可能会有点摸不着头脑,这“小智”到底是个啥?是…...

ESP32边缘AI部署实战:从模型量化到嵌入式推理全流程解析
1. 项目概述:当ESP32遇见AI,边缘智能的微型革命最近在捣鼓一个挺有意思的开源项目,叫wangzongming/esp-ai。光看名字,你可能觉得这又是一个把AI模型塞进微控制器的尝试,但实际深入后,我发现它的野心和实现方…...

视觉显著目标的自适应分割与动态网格生成算法研究
ArticleObjectiveMethodComments视觉显著目标的自适应分割背景是基于视觉注意模型和最大熵分割算法,针对复杂背景下的显著目标分割问题。目的是提出一种自适应显著目标分割方法,以便快速准确地从场景图像中检测出显著目标。试验用的方法是通过颜色、强度…...

OpenClaw量化回测性能调优指南:从数据加载到并行计算的实战优化
1. 项目概述:从开源工具到性能调优的艺术最近在跟几个做量化交易的朋友聊天,他们都在为一个问题头疼:策略回测和实盘执行的速度。动辄几十个G的历史数据,复杂的因子计算,加上高频的模拟交易,一套流程跑下来…...

量子优化算法在组合优化问题中的应用与性能分析
1. 量子优化算法与组合优化问题概述组合优化问题广泛存在于物流调度、网络设计、芯片布局等工业场景中,其核心挑战在于从离散解空间中高效寻找最优解。传统经典算法在面对NP难问题时往往面临计算复杂度爆炸的困境。量子优化算法通过量子叠加和纠缠等特性,…...

CodeWeaver:多仓库聚合分析工具的设计、部署与实战指南
1. 项目概述与核心价值最近在折腾一个老项目,需要把一堆陈年的、用不同语言和框架写的代码仓库整合到一个统一的视图里进行管理和分析。手动去每个仓库里翻看提交记录、统计代码行数、检查依赖关系,这活儿想想就头大。就在我准备硬着头皮写脚本的时候&am…...