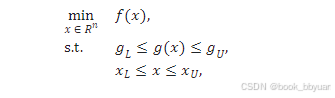
如何使用ipopt进行非线性约束求目标函数最小值(NLP非线性规划)内点法(inner point method)
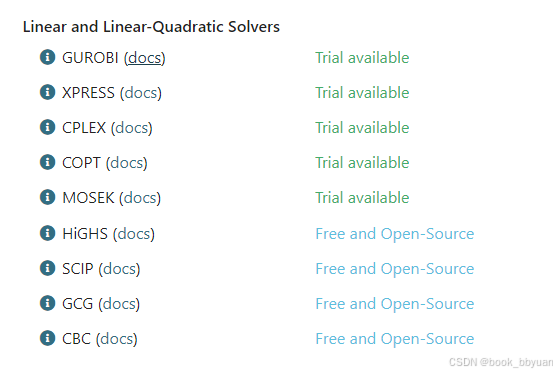
非线性规划,一般用matlab调用cplex和gurobi了,但这两个一般用于线性规划和二次规划
线性规划LP,二次规划(quadratic programming),如果要求更一般的非线性规划IPOT是个很好的选择,求解器很多,根据情况自己选择
非线性

具体的,这篇文章介绍的很清楚了https://blog.csdn.net/mpt0816/article/details/127638557
我这里就是再选择一个问题进行求解
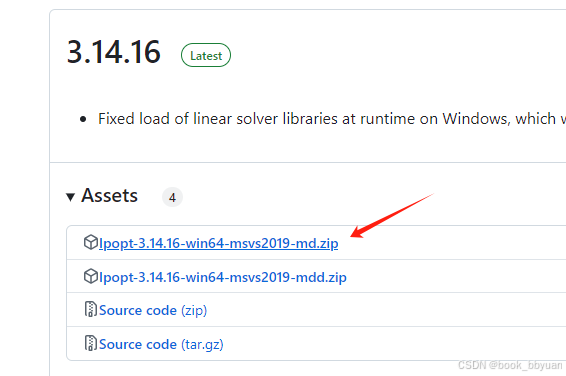
ipopt的可执行程序下载下来, Releases · coin-or/Ipopt · GitHub
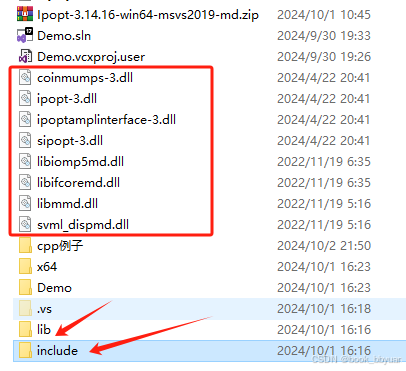
建立一个vs2022的工程,把include加到目录里面,把lib库都加进去,同样dll也准备好
就这一个主文件放入工程
编译运行即可
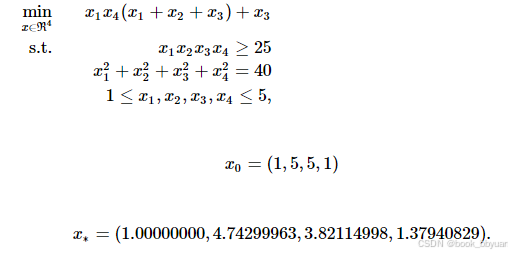
四个自变量,两个约束
eval_f: 计算目标函数值,即需要最小化的目标。
eval_grad_f: 计算目标函数的梯度。分别是4个偏导数
eval_g: 计算约束条件的值。 n 是变量个数,m是约束条件个数,g是具体的约束函数
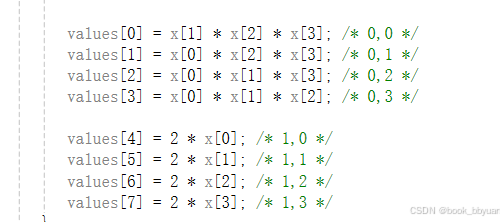
eval_jac_g: 计算约束条件的雅可比矩阵(两个约束条件的一阶偏导数)
eval_h: 计算目标函数和约束条件的二阶导数(即Hessian矩阵,二阶偏导数)。
现在使用matlab符号函数把 涉及到 用的 梯度、黑森矩阵都求一下
%clear all
close all
clc% 使用符号函数进行 求解梯度,黑森矩阵syms f g1 g2
syms x1 x2 x3 x4% 定义目标函数
f = x1 * x4 * (x1 + x2 + x3) + x3;% 定义约束函数
g1 = x1 * x2 * x3 * x4;
g2 = x1^2 + x2^2 + x3^2 + x4^2;% 计算目标函数的梯度和 Hessian
grad_f = gradient(f, [x1, x2, x3, x4]);
hess_f = hessian(f, [x1, x2, x3, x4]);% 计算约束函数 g1 的梯度和 Hessian
grad_g1 = gradient(g1, [x1, x2, x3, x4]);
hess_g1 = hessian(g1, [x1, x2, x3, x4]);% 计算约束函数 g2 的梯度和 Hessian
grad_g2 = gradient(g2, [x1, x2, x3, x4]);
hess_g2 = hessian(g2, [x1, x2, x3, x4]);得到如下结果:
目标函数 f 的梯度:
x1*x4 + x4*(x1 + x2 + x3)
x1*x4
x1*x4 + 1
x1*(x1 + x2 + x3)
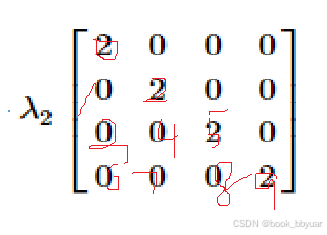
目标函数 f 的 Hessian:
[ 2*x4, x4, x4, 2*x1 + x2 + x3]
[ x4, 0, 0, x1]
[ x4, 0, 0, x1]
[ 2*x1 + x2 + x3, x1, x1, 0]
约束函数 g1 的梯度:
x2*x3*x4
x1*x3*x4
x1*x2*x4
x1*x2*x3
约束函数 g2 的梯度:
2*x1
2*x2
2*x3
2*x4
从g1 g2看出来
nele_jac = 8; 8个非零,两个约束条件,4个变量
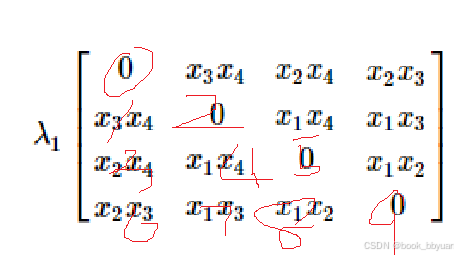
nele_hess = 10; 4*5/2=10,看其中一个hess矩阵的上三角阵
约束函数 g1 的 Hessian:
[ 0, x3*x4, x2*x4, x2*x3]
[ x3*x4, 0, x1*x4, x1*x3]
[ x2*x4, x1*x4, 0, x1*x2]
[ x2*x3, x1*x3, x1*x2, 0]
约束函数 g2 的 Hessian:
[ 2, 0, 0, 0]
[ 0, 2, 0, 0]
[ 0, 0, 2, 0]
[ 0, 0, 0, 2]
要替换的部分
1、eval_f 中 目标函数
![]()
2、eval_grad_f 中的梯度
grad_f[0] = x[0] * x[3] + x[3] * (x[0] + x[1] + x[2]);
grad_f[1] = x[0] * x[3];
grad_f[2] = x[0] * x[3] + 1;
grad_f[3] = x[0] * (x[0] + x[1] + x[2]);
3、eval_g 约束条件
g[0] = x[0] * x[1] * x[2] * x[3] + my_data->g_offset[0];
g[1] = x[0] * x[0] + x[1] * x[1] + x[2] * x[2] + x[3] * x[3] + my_data->g_offset[1];
4、eval_jac_g 约束函数的jacobi矩阵

if中 (8个),位置是
00 01 02 03
10 11 12 13,
else 中
g1梯度,g2梯度
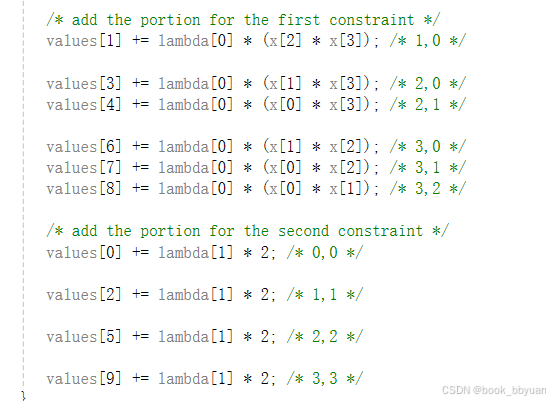
5、eval_h 黑森矩阵
固定抄写,4是变量个数
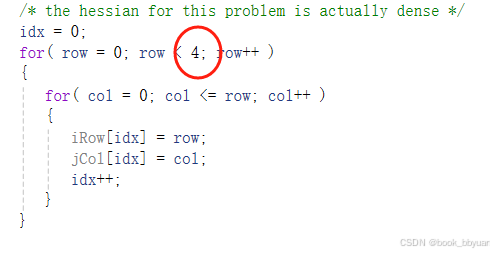
目标的黑森矩阵,注意走位,注意骚走位,注意下三角阵骚走位


约束的黑森
6、主函数
初始值和 上下限
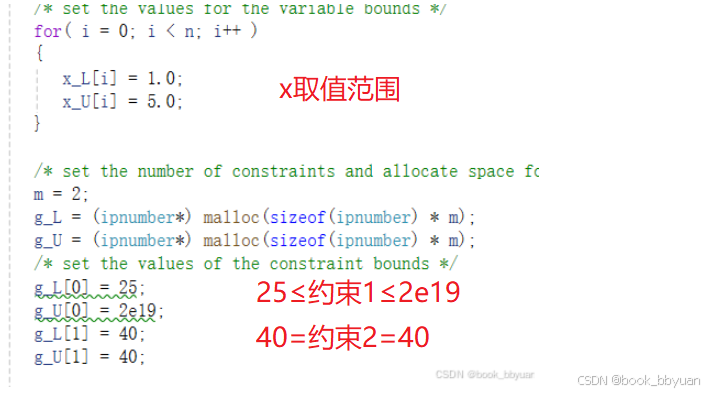
约束条件的jacobi矩阵和hess矩阵的非零元素

8个=2*自变量个数
10个=自变量个数*(自变量个数+1)/2

初始值

matlab符号函求解出来的各种算式写成c有点麻烦,我这边搞了一个函数可以很方便转c
function f_str = changetoc(f)syms x1 x2 x3 x4 %替换c语言风格
syms R %为了 R^2也能转% f = x1^2 + x2^2 + x3^2 + x4^2; % 示例符号函数
% f = x1^2 + x2^2 + (x1 + x2)^2 + x3^2 + x4^2; % 示例符号函数,包含复杂表达式
% f = (r*sin(theta)*(3*cos(x1) - 4) + (x2*cos(theta)*(2*cos(x1) - 2))/n1 + (x2*sin(theta)*sin(x1))/n1)^2% 将符号函数转换为字符串
f_str = char(f);% 替换变量为 C 风格的数组索引 x[0], x[1], x[2], x[3]
f_str = regexprep(f_str, 'x1', 'x[0]');
f_str = regexprep(f_str, 'x2', 'x[1]');
f_str = regexprep(f_str, 'x3', 'x[2]');
f_str = regexprep(f_str, 'x4', 'x[3]');% 定义一个集合(Cell数组)用于保存普通变量名
variables = {'x[0]','x[1]','x[2]','x[3]', 'R'};%
% % 示例复杂表达式
% f = (r*sin(theta)*(3*cos(x1) - 4) + (x2*cos(theta)*(2*cos(x1) - 2))/n1 + (x2*sin(theta)*sin(x1))/n1)^2 - R^2 + ...
% (r*cos(theta) + r*sin(theta)*(6*x1 - 6*sin(x1)) + (x2*sin(theta)*(2*cos(x1) - 2))/n1 + ...
% (x2*cos(theta)*(3*x1 - 4*sin(x1)))/n1)^2;% 将符号函数转换为字符串
% f_str = char(f);% 1. 替换普通变量的平方为自乘形式
for i = 1:length(variables)% 构建正则表达式,匹配形如 x1^2, x2^2 等var_pattern = strcat(variables{i}, '^2');% 构建替换字符串 (x1*x1), (x2*x2)replacement = strcat('(', variables{i}, '*', variables{i}, ')');% 进行替换f_str = strrep(f_str, var_pattern, replacement);
end% % 找到 x[i]^2 形式的幂运算,并替换为 (x[i]*x[i])
f_str = regexprep(f_str, '(\w+\[\d+\])\^2', '$1*$1');% 2. 替换括号表达式的平方为自乘形式
% 匹配 (xxxx)^2,替换为 (xxxx)*(xxxx)
% f_str = regexprep(f_str, '\(([^\)]+)\)\^2', '($1)*($1)');
f_str = regexprep(f_str, '\((.*?)\)\^2', '($1)*($1)');% 输出替换后的表达式
disp(f_str);end相关文章:
如何使用ipopt进行非线性约束求目标函数最小值(NLP非线性规划)内点法(inner point method)
非线性规划,一般用matlab调用cplex和gurobi了,但这两个一般用于线性规划和二次规划 线性规划LP,二次规划(quadratic programming),如果要求更一般的非线性规划IPOT是个很好的选择,求解器很多&a…...

【Unity学习笔记】解决疑似升级Win11或使用Unity6导致Unity旧版本无法打开的问题
【Unity学习笔记】解决疑似升级Win11或使用Unity6导致Unity旧版本无法打开的问题 一句话省流: 确保项目地址没有任何中文,重新申请个许可证,然后该咋就咋,完事。 ——————————————————————————————…...

回归分析在数据挖掘中的应用简析
一、引言 在数据驱动的时代,数据挖掘技术已成为从海量数据中提取有价值信息的关键工具。 回归分析,作为一种经典的统计学习方法,不仅在理论研究上有着深厚的基础,而且在实际 应用中也展现出强大的功能。 二、回归分析基础 2.1 回…...

【Node.js】worker_threads 多线程
Node.js 中的 worker_threads 模块 worker_threads 模块是 Node.js 中用于创建多线程处理的工具。 尽管 JavaScript 是单线程的,但有时候在处理计算密集型任务或长时间运行的操作时,单线程的运行会导致主线程被阻塞,影响服务器性能。 为了…...

贪心算法c++
贪心算法C概述 一、贪心算法的基本概念 贪心算法(Greedy Algorithm),又名贪婪法,是一种解决优化问题的常用算法。其基本思想是在问题的每个决策阶段,都选择当前看起来最优的选择,即贪心地做出局部最优的决…...

【STM32】 TCP/IP通信协议(3)--LwIP网络接口
LwIP协议栈支持多种不同的网络接口(网卡),由于网卡是直接跟硬件平台打交道,硬件不同则处理也是不同。那Iwip如何兼容这些不同的网卡呢? LwIP提供统一的接口,底层函数需要用户自行完成,例如网卡的…...

15分钟学 Python 第39天:Python 爬虫入门(五)
Day 39:Python 爬虫入门数据存储概述 在进行网页爬虫时,抓取到的数据需要存储以供后续分析和使用。常见的存储方式包括但不限于: 文件存储(如文本文件、CSV、JSON)数据库存储(如SQLite、MySQL、MongoDB&a…...

使用Pytorch构建自定义层并在模型中使用
使用Pytorch构建自定义层并在模型中使用 继承自nn.Module类,自定义名称为NoisyLinear的线性层,并在新模型定义过程中使用该自定义层。完整代码可以在jupyter nbviewer中在线访问。 import torch import torch.nn as nn from torch.utils.data import T…...
:从前序与中序遍历序列构造二叉树)
学习记录:js算法(五十六):从前序与中序遍历序列构造二叉树
文章目录 从前序与中序遍历序列构造二叉树我的思路网上思路 总结 从前序与中序遍历序列构造二叉树 给定两个整数数组 preorder 和 inorder ,其中 preorder 是二叉树的先序遍历, inorder 是同一棵树的中序遍历,请构造二叉树并返回其根节点。 示…...

qt使用QDomDocument读写xml文件
在使用QDomDocument读写xml之前需要在工程文件添加: QT xml 1.生成xml文件 void createXml(QString xmlName) {QFile file(xmlName);if (!file.open(QIODevice::WriteOnly | QIODevice::Truncate |QIODevice::Text))return false;QDomDocument doc;QDomProcessin…...

Oracle架构之表空间详解
文章目录 1 表空间介绍1.1 简介1.2 表空间分类1.2.1 SYSTEM 表空间1.2.2 SYSAUX 表空间1.2.3 UNDO 表空间1.2.4 USERS 表空间 1.3 表空间字典与本地管理1.3.1 字典管理表空间(Dictionary Management Tablespace,DMT)1.3.2 本地管理方式的表空…...

springboot整合seata
一、准备 docker部署seata-server 1.5.2参考:docker安装各个组件的命令 二、springboot集成seata 2.1 引入依赖 <dependency><groupId>com.alibaba.cloud</groupId><artifactId>spring-cloud-starter-alibaba-seata</artifactId>&…...
【二次向用户申请授权】程序访问控制)
鸿蒙开发(NEXT/API 12)【二次向用户申请授权】程序访问控制
当应用通过[requestPermissionsFromUser()]拉起弹框[请求用户授权]时,用户拒绝授权。应用将无法再次通过requestPermissionsFromUser拉起弹框,需要用户在系统应用“设置”的界面中,手动授予权限。 在“设置”应用中的路径: 路径…...

docker export/import 和 docker save/load 的区别
Docker export/import 和 docker save/load 都是用于容器和镜像的备份和迁移,但它们有一些关键的区别: docker export/import: export 作用于容器,import 创建镜像导出的是容器的文件系统,不包含镜像的元数据丢失了镜像的层级结构…...

明星周边销售网站开发:SpringBoot技术全解析
1系统概述 1.1 研究背景 如今互联网高速发展,网络遍布全球,通过互联网发布的消息能快而方便的传播到世界每个角落,并且互联网上能传播的信息也很广,比如文字、图片、声音、视频等。从而,这种种好处使得互联网成了信息传…...

STM32+ADC+扫描模式
1 ADC简介 1 ADC(模拟到数字量的桥梁) 2 DAC(数字量到模拟的桥梁),例如:PWM(只有完全导通和断开的状态,无功率损耗的状态) DAC主要用于波形生成(信号发生器和音频解码器) 3 模拟看门狗自动监…...

R语言绘制散点图
散点图是一种在直角坐标系中用数据点直观呈现两个变量之间关系、可检测异常值并探索数据分布的可视化图表。它是一种常用的数据可视化工具,我们通过不同的参数调整和包的使用,可以创建出满足各种需求的散点图。 常用绘制散点图的函数有plot()函数和ggpl…...

安装最新 MySQL 8.0 数据库(教学用)
安装 MySQL 8.0 数据库(教学用) 文章目录 安装 MySQL 8.0 数据库(教学用)前言MySQL历史一、第一步二、下载三、安装四、使用五、语法总结 前言 根据 DB-Engines 网站的数据库流行度排名(2024年)࿰…...

微信小程序开发-配置文件详解
文章目录 一,小程序创建的配置文件介绍二,配置文件-全局配置-pages 配置作用:注意事项:示例: 三,配置文件-全局配置-window 配置示例: 四,配置文件-全局配置-tabbar 配置核心作用&am…...

TCP/UDP初识
TCP是面向连接的、可靠的、基于字节流的传输层协议。 面向连接:一定是一对一连接,不能像 UDP 协议可以一个主机同时向多个主机发送消息 可靠的:无论的网络链路中出现了怎样的链路变化,TCP 都可以保证一个报文一定能够到达接收端…...

如何为《欧洲卡车模拟2》实现完整智能驾驶体验?ETS2LA自动驾驶插件终极指南
如何为《欧洲卡车模拟2》实现完整智能驾驶体验?ETS2LA自动驾驶插件终极指南 【免费下载链接】Euro-Truck-Simulator-2-Lane-Assist Plugin based interface program for ETS2/ATS. 项目地址: https://gitcode.com/gh_mirrors/eur/Euro-Truck-Simulator-2-Lane-Ass…...
安装与中文环境配置实战)
Halcon深度学习工具(DLT)安装与中文环境配置实战
1. Halcon DLT安装前的准备工作 第一次接触Halcon深度学习工具(DLT)时,我完全被各种专业术语搞晕了。后来才发现,只要做好前期准备,安装过程其实比想象中简单得多。首先需要确认的是你的Windows系统版本,DLT目前支持Windows 10和1…...

如何用nmrpflash拯救你的Netgear路由器:从“变砖“到重生的完整指南
如何用nmrpflash拯救你的Netgear路由器:从"变砖"到重生的完整指南 【免费下载链接】nmrpflash Netgear Unbrick Utility 项目地址: https://gitcode.com/gh_mirrors/nmr/nmrpflash 当你的Netgear路由器固件升级失败、意外断电或系统崩溃后无法启动…...

Windows上运行Swift代码的三种实战路径
1. 为什么Windows开发者需要Swift? Swift作为苹果生态的主力编程语言,近年来在服务端开发、机器学习等领域的应用越来越广泛。但很多刚接触Swift的Windows开发者会发现:官方文档里压根没提Windows支持!这其实是因为Swift最初就是…...

【STC8H】GPIO模式深度解析:从准双向到推挽,如何精准控制外设
1. STC8H的GPIO模式全景解析 第一次接触STC8H的GPIO配置时,我被那个神秘的PxM0和PxM1寄存器搞得晕头转向。直到有一次调试I2C通讯失败,才发现是开漏模式配置错误。这次教训让我明白,理解GPIO的四种工作模式,就像掌握不同武器的使用…...

【最新 v2.7.1 版本安装包】零基础也能流畅使用,OpenClaw 无需命令一键部署保姆级教程
OpenClaw(小龙虾)Windows 一键部署保姆级教程 | 10 分钟搭建专属数字员工【点击下载最新OpenClaw安装包】 前言 2026 年开源圈热门 AI 智能体 OpenClaw(昵称小龙虾),GitHub 星标突破 28 万,凭借本地运行 …...

016、Git版本控制与协作开发流程
016 Git版本控制与协作开发流程 一个让我熬夜到凌晨三点的.gitignore 去年做一款基于STM32U5的TinyML手势识别项目,团队四个人,代码库从第一天就开始膨胀。第三天晚上,我习惯性git push,然后去睡觉。凌晨三点被手机震醒——同事在群里@我:“你push了个啥?编译不过了。”…...

React轻量级代码编辑器组件:基于Textarea的语法高亮方案
1. 项目概述:一个为React开发者量身打造的代码编辑器组件 如果你在React项目中需要嵌入一个代码编辑器,并且希望它轻量、美观、开箱即用,那么 uiwjs/react-textarea-code-editor 这个组件库很可能就是你一直在寻找的解决方案。它不是一个像…...

【模拟电路】Circuit JS:从零到一,构建你的首个交互式电路实验
1. 初识Circuit JS:你的虚拟电路实验室 第一次接触Circuit JS时,我正为一个简单的LED电路设计发愁。传统仿真软件要么安装复杂,要么收费昂贵,直到发现这个直接在浏览器里运行的免费工具。打开网页的瞬间,就像走进了中学…...

基于Python与Playwright的招聘信息自动化聚合与智能筛选工具实践
1. 项目概述:一个面向求职者的自动化信息聚合与投递工具最近在和一些做开发的朋友聊天,发现大家普遍有个痛点:找工作太费时间了。每天要在几个招聘App之间来回切换,重复筛选岗位、刷新列表、投递简历,机械性的操作占据…...