OpenHarmony(鸿蒙南向开发)——轻量系统内核(LiteOS-M)【扩展组件】
往期知识点记录:
- 鸿蒙(HarmonyOS)应用层开发(北向)知识点汇总
- 鸿蒙(OpenHarmony)南向开发保姆级知识点汇总~
- 持续更新中……
C++支持
基本概念
C++作为目前使用最广泛的编程语言之一,支持类、封装、重载等特性,是在C语言基础上开发的一种面向对象的编程语言。
运行机制
C++代码的识别主要由编译器支持,系统主要对全局对象进行构造函数调用,进行初始化操作。
开发指导
接口说明
表1 C++支持接口
| 功能分类 | 接口名 | 描述 |
|---|---|---|
| 使用C++特性的前置条件 | LOS_CppSystemInit | C++构造函数初始化 |
开发流程
使用C++特性之前,需要调用函数LOS_CppSystemInit,实现C++构造函数初始化,其中被初始化的构造函数存在init_array这个段中,段区间通过变量__init_array_start__、__init_array_end__传递。
表2 参数说明
| 参数 | 参数说明 |
|---|---|
| init_array_start | init_array段起始位置 |
| init_array_end | init_array段结束位置 |
说明: 调用该函数时,一定要在c++业务前。另外部分与系统资源强相关的类或接口,如std::thread,std::mutex等,在三方编译器使用的c库非musl c时,存在兼容性问题,不建议使用。
编程实例
void app_init(void)
{
......
/* 启动阶段C++初始化 */
LOS_CppSystemInit((UINTPTR)&__init_array_start__, (UINTPTR)&__init_array_end__);
/* C++业务 */
......
}
CPU占用率
基本概念
CPU(中央处理器,Central Processing Unit)占用率分为系统CPU占用率和任务CPU占用率。
系统CPU占用率:是指周期时间内系统的CPU占用率,用于表示系统一段时间内的闲忙程度,也表示CPU的负载情况。系统CPU占用率的有效表示范围为0~100,其单位为百分比。100表示系统满负荷运转。
任务CPU占用率:指单个任务的CPU占用率,用于表示单个任务在一段时间内的闲忙程度。任务CPU占用率的有效表示范围为0~100,其单位为百分比。100表示在一段时间内系统一直在运行该任务。
用户通过系统级的CPU占用率,判断当前系统负载是否超出设计规格。
通过系统中各个任务的CPU占用情况,判断各个任务的CPU占用率是否符合设计的预期。
此外开启CPUP的情况下,可选择开启中断占用率统计。
中断占用率:是指单个中断在全部中断消耗时间的占用率。占用率的有效表示范围为0~100。100表示在一段时间内仅触发该中断。
运行机制
OpenHarmony LiteOS-M的CPUP(CPU Percent,系统CPU占用率)采用任务级记录的方式,在任务切换时,记录任务启动时间,任务切出或者退出时间,每次当任务退出时,系统会累加整个任务的占用时间。
可以在target_config.h的中对该功能进行选配。
OpenHarmony LiteOS-M提供以下两种CPU占用率的信息查询:
- 系统CPU占用率。
- 任务CPU占用率。
此外,系统还提供了中断占用率的信息查询能力(需同时开启CPUP和定时器)。
占用率的计算方法:
系统CPU占用率=系统中除idle任务外其他任务运行总时间/系统运行总时间
任务CPU占用率=任务运行总时间/系统运行总时间
中断占用率=单个中断运行时间/中断运行总时间
接口说明
表1 功能列表
| 功能分类 | 接口描述 |
|---|---|
| 获取系统CPU占用率 | LOS_SysCpuUsage:获取当前系统CPU占用率 |
| LOS_HistorySysCpuUsage:获取系统历史CPU占用率 | |
| 获取任务CPU占用率 | LOS_TaskCpuUsage:获取指定任务CPU占用率 |
| LOS_HistoryTaskCpuUsage:获取指定任务历史CPU占用率 | |
| LOS_AllTaskCpuUsage:获取所有任务CPU占用率 | |
| 输出任务CPU占用率 | LOS_CpupUsageMonitor:输出任务历史CPU占用率 |
| 获取中断CPU占用率 | LOS_GetAllIrqCpuUsage:获取所有中断CPU占用率 |
开发流程
在kernel/liteos_m目录下执行 make menuconfig 命令配置"Kernel->Enable Cpup"中打开YES开启任务cpup;
开启后出现新选项“Enable Cpup include irq”打开YES开启中断cpup。
CPU占用率的典型开发流程:
-
调用获取系统CPU占用率函数LOS_SysCpuUsage。
-
调用获取系统历史CPU占用率函数LOS_HistorySysCpuUsage。
-
调用获取指定任务CPU占用率函数LOS_TaskCpuUsage。
- 若任务已创建,则关中断,正常获取,恢复中断;
- 若任务未创建,则返回错误码;
-
调用获取指定任务历史CPU占用率函数LOS_HistoryTaskCpuUsage。
- 若任务已创建,则关中断,根据不同模式正常获取,恢复中断;
- 若任务未创建,则返回错误码;
-
调用获取所有任务CPU占用率函数LOS_AllCpuUsage。
- 若CPUP已初始化,则关中断,根据不同模式正常获取,恢复中断;
- 若CPUP未初始化或有非法入参,则返回错误码;
编程实例
实例描述
本实例实现如下功能:
-
创建一个用于CPUP测试的任务。
-
获取当前系统CPUP。
-
以不同模式获取历史系统CPUP。
-
获取创建的测试任务的CPUP。
-
以不同模式获取创建的测试任务的CPUP
示例代码
前提条件:
在kernel/liteos_m目录下执行 make menuconfig命令配置"Kernel->Enable Cpup"中开启任务cpup:
代码实现如下:
本演示代码在 ./kernel/liteos_m/testsuites/src/osTest.c 中编译验证,在TestTaskEntry中调用验证入口函数ExampleCpup。
#include "los_task.h"
#include "los_cpup.h"#define TEST_TASK_PRIO 5
#define TASK_DELAY_TIME 100
VOID CpupTask(VOID)
{printf("entry cpup test example\n");usleep(TASK_DELAY_TIME);usleep(TASK_DELAY_TIME);printf("exit cpup test example\n");
}UINT32 ExampleCpup(VOID)
{UINT32 ret;UINT32 cpupUse;UINT32 taskID;TSK_INIT_PARAM_S cpupTestTask = { 0 };cpupTestTask.pfnTaskEntry = (TSK_ENTRY_FUNC)CpupTask;cpupTestTask.pcName = "TestCpupTsk";cpupTestTask.uwStackSize = LOSCFG_BASE_CORE_TSK_DEFAULT_STACK_SIZE;cpupTestTask.usTaskPrio = TEST_TASK_PRIO;ret = LOS_TaskCreate(&taskID, &cpupTestTask);if(ret != LOS_OK) {printf("cpupTestTask create failed .\n");return LOS_NOK;}usleep(TASK_DELAY_TIME);/* 获取当前系统CPU占用率 */cpupUse = LOS_SysCpuUsage();printf("the current system cpu usage is: %u.%u\n",cpupUse / LOS_CPUP_PRECISION_MULT, cpupUse % LOS_CPUP_PRECISION_MULT);/* 获取当前系统历史CPU占用率 */cpupUse = LOS_HistorySysCpuUsage(CPUP_LESS_THAN_1S);printf("the history system cpu usage in all time:%u.%u\n",cpupUse / LOS_CPUP_PRECISION_MULT, cpupUse % LOS_CPUP_PRECISION_MULT);/* 获取指定任务的CPU占用率 */cpupUse = LOS_TaskCpuUsage(taskID);printf("cpu usage of the cpupTestTask:\n TaskID: %d\n usage: %u.%u\n",taskID, cpupUse / LOS_CPUP_PRECISION_MULT, cpupUse % LOS_CPUP_PRECISION_MULT);/* 获取指定任务在系统启动到现在的CPU占用率 */cpupUse = LOS_HistoryTaskCpuUsage(taskID, CPUP_LESS_THAN_1S);printf("cpu usage of the cpupTestTask in all time:\n TaskID: %d\n usage: %u.%u\n",taskID, cpupUse / LOS_CPUP_PRECISION_MULT, cpupUse % LOS_CPUP_PRECISION_MULT);return LOS_OK;
}结果验证
编译运行得到的结果为:
entry cpup test example
the current system cpu usage is: 8.2
the history system cpu usage in all time:8.9
cpu usage of the cpupTestTask:TaskID: 5usage: 0.5
cpu usage of the cpupTestTask in all time:TaskID: 5usage: 0.5exit cpup test example根据实际运行环境,上文中的数据会有差异,非固定结果
动态加载
基本概念
在硬件资源有限的小设备中,需要通过算法的动态部署能力来解决无法同时部署多种算法的问题。以开发者易用为主要考虑因素,同时考虑到多平台的通用性,LiteOS-M选择业界标准的ELF加载方案,方便拓展算法生态。LiteOS-M提供类似于dlopen、dlsym等接口,APP通过动态加载模块提供的接口可以加载、卸载相应算法库。如图1所示,APP需要通过三方算法库所需接口获取对应信息输出,三方算法库又依赖内核提供的基本接口,如malloc等。APP加载所需接口,并对相关的未定义符号完成重定位后,APP即可调用该接口完成功能调用。目前动态加载组件只支持arm架构。此外,待加载的共享库需要验签或者限制来源,确保系统的安全性。
图1 LiteOS-M内核动态加载架构图

运行机制
符号表导出
共享库调用内核接口需要内核主动暴露动态库所需的接口,如图2所示,该机制将符号信息编译到指定段中,调用SYM_EXPORT宏即可完成对指定符号的信息导出。符号信息通过结构体SymInfo描述,成员包括符号名和符号地址信息,宏SYM_EXPORT通过__attribute__编译属性将符号信息导入.sym.*段中。
typedef struct {CHAR *name;UINTPTR addr;
} SymInfo;#define SYM_EXPORT(func) \
const SymInfo sym_##func __attribute__((section(".sym."#func))) = { \.name = #func, \.addr = (UINTPTR)func \
};
图2 导出的符号表信息

ELF文件加载
加载过程中,根据ELF文件的句柄以及程序头表的段偏移可以得到需要加载到内存的LOAD段,一般有两个段,只读段及读写段,如下所示,可以用readelf -l查看ELF文件的LOAD段信息。如图3所示,根据相应的对齐属性申请物理内存,通过每个段的加载基址及偏移将代码段或数据段写入内存中。
$ readelf -l lib.soElf file type is DYN (Shared object file)
Entry point 0x5b4
There are 4 program headers, starting at offset 52Program Headers:Type Offset VirtAddr PhysAddr FileSiz MemSiz Flg AlignEXIDX 0x000760 0x00000760 0x00000760 0x00008 0x00008 R 0x4LOAD 0x000000 0x00000000 0x00000000 0x0076c 0x0076c R E 0x10000LOAD 0x00076c 0x0001076c 0x0001076c 0x0010c 0x00128 RW 0x10000DYNAMIC 0x000774 0x00010774 0x00010774 0x000c8 0x000c8 RW 0x4Section to Segment mapping:Segment Sections...00 .ARM.exidx01 .hash .dynsym .dynstr .rel.dyn .rel.plt .init .plt .text .fini .ARM.exidx .eh_frame02 .init_array .fini_array .dynamic .got .data .bss03 .dynamic
图3 ELF文件的加载过程

ELF文件链接
如图4所示,通过ELF文件的.dynamic段获取重定位表,遍历表中每一个需要重定位的条目,再根据需要重定位的符号名在共享库和内核提供的导出符号表中查找相应符号并更新相应的重定位信息。
图4 ELF文件的链接过程

ELF支持规格
ELF支持类型
编译共享库时,添加-fPIC可以编译出位置无关代码(-fPIC为编译选项),此时共享库文件类型为ET_DYN,其可以加载至任意有效的地址区间。
例:arm-none-eabi-gcc -fPIC –shared –o lib.so lib.c
ELF共享库编译链接选项
-
“-nostdlib”编译链接选项:不依赖编译器中lib库。
-
“-nostartfiles”编译链接选项:不依赖编译器中启动相关的文件。
-
“-fPIC”编译选项:可编译位置无关的共享库。
-
“-z max-page-size=4”链接选项:二进制文件中可加载段的对齐字节数为4,可节约内存,可用于动态库。
-
“-mcpu=”需要指定对应的CPU架构。
约束
- 不支持应用程序加载,只支持共享库加载。
- 待加载的共享库不能依赖编译器中的libc库及其他共享库,只能依赖内核提供的对外接口(由导出的符号表提供)。
- 依赖交叉编译器及文件系统。
文件系统
VFS
基本概念
VFS(Virtual File System) 是文件系统的虚拟层,它不是一个实际的文件系统,而是一个异构文件系统之上的软件粘合层,为用户提供统一的类Unix文件操作接口。由于不同类型的文件系统接口不统一,若系统中有多个文件系统类型,访问不同的文件系统就需要使用不同的非标准接口。而通过在系统中添加VFS层,提供统一的抽象接口,屏蔽了底层异构类型的文件系统的差异,使得访问文件系统的系统调用不用关心底层的存储介质和文件系统类型,提高开发效率。
M核的文件系统子系统当前支持的文件系统有FATFS与LittleFS。通过VFS层提供了POSIX标准的操作,保持了接口的一致性,但是因为M核的资源非常紧张,VFS层非常轻薄,没有提供类似A核的高级功能(如pagecache等),主要是接口的标准化和适配工作,具体的事务由各个文件系统实际承载。M核文件系统支持的功能如下表所示:
接口说明
表1 文件操作
| 接口名 | 描述 | FATFS | LITTLEFS |
|---|---|---|---|
| open | 打开文件 | 支持 | 支持 |
| close | 关闭文件 | 支持 | 支持 |
| read | 读取文件内容 | 支持 | 支持 |
| write | 往文件写入内容 | 支持 | 支持 |
| lseek | 设置文件偏移位置 | 支持 | 支持 |
| stat | 通过文件路径名获取文件信息 | 支持 | 支持 |
| unlink | 删除文件 | 支持 | 支持 |
| rename | 重命名文件 | 支持 | 支持 |
| fstat | 通过文件句柄获取文件信息 | 支持 | 支持 |
| fsync | 文件内容刷入存储设备 | 支持 | 支持 |
表2 目录操作
| 接口名 | 描述 | FATFS | LITTLEFS |
|---|---|---|---|
| mkdir | 创建目录 | 支持 | 支持 |
| opendir | 打开目录 | 支持 | 支持 |
| readdir | 读取目录项内容 | 支持 | 支持 |
| closedir | 关闭目录 | 支持 | 支持 |
| rmdir | 删除目录 | 支持 | 支持 |
表3 分区操作
| 接口名 | 描述 | FATFS | LITTLEFS |
|---|---|---|---|
| mount | 分区挂载 | 支持 | 支持 |
| umount | 分区卸载 | 支持 | 支持 |
| umount2 | 分区卸载,可通过MNT_FORCE参数进行强制卸载 | 支持 | 不支持 |
| statfs | 获取分区信息 | 支持 | 不支持 |
ioctl,fcntl等接口由不同的lib库支持,与底层文件系统无关。
FAT
基本概念
FAT文件系统是File Allocation Table(文件配置表)的简称,主要包括DBR区、FAT区、DATA区三个区域。其中,FAT区各个表项记录存储设备中对应簇的信息,包括簇是否被使用、文件下一个簇的编号、是否文件结尾等。FAT文件系统有FAT12、FAT16、FAT32等多种格式,其中,12、16、32表示对应格式中FAT表项的比特数。FAT文件系统支持多种介质,特别在可移动存储介质(U盘、SD卡、移动硬盘等)上广泛使用,使嵌入式设备和Windows、Linux等桌面系统保持很好的兼容性,方便用户管理操作文件。
OpenHarmony内核支持FAT12、FAT16与FAT32三种格式的FAT文件系统,具有代码量小、资源占用小、可裁切、支持多种物理介质等特性,并且与Windows、Linux等系统保持兼容,支持多设备、多分区识别等功能。OpenHarmony内核支持硬盘多分区,可以在主分区以及逻辑分区上创建FAT文件系统。
开发指导
驱动适配
FAT文件系统的使用需要底层MMC相关驱动的支持。在一个带MMC存储设备的板子上运行FATFS,需要:
1、适配板端EMMC驱动,实现disk_status、disk_initialize、disk_read、disk_write、disk_ioctl接口;
2、新增fs_config.h文件,配置FS_MAX_SS(存储设备最大sector大小)、FF_VOLUME_STRS(分区名)等信息,例如:
#define FF_VOLUME_STRS "system", "inner", "update", "user"
#define FS_MAX_SS 512
#define FAT_MAX_OPEN_FILES 50
分区挂载
移植FATFS到新硬件设备上,需要在初始化flash驱动后,完成设备分区。
设备分区接口:int LOS_DiskPartition(const char *dev, const char *fsType, int *lengthArray, int *addrArray, int partNum);
- dev:设备名称, 如“spinorblk0”
- fsType:文件系统类型,”vfat“
- lengthArray:该设备上各分区的长度列表,fatfs填入百分比即可
- addrArray:该设备上各分区的起始地址列表
- partNum:分区的个数
格式化接口:int LOS_PartitionFormat(const char *partName, char *fsType, void *data);
- partName:分区名称,设备名称+ ‘p’ + 分区号,如“spinorblk0p0”
- fsType:文件系统类型,”vfat“
- data:私有数据 传入(VOID *)formatType,(如FMT_FAT, FMT_FAT32)
mount接口:int mount(const char *source, const char *target, const char *filesystemtype, unsigned long mountflags, const void *data);
- source:分区名称,设备名称+ ‘p’ + 分区号,如“spinorblk0p0”
- target:挂载路径
- filesystemtype:文件系统类型,”vfat“
- mountflags:mount配置参数
- data:私有数据,传入(VOID *)formatType,(如FMT_FAT, FMT_FAT32)
本参考代码已在 ./device/qemu/arm_mps2_an386/liteos_m/board/fs/fs_init.c 中实现,M核qemu上可直接使用,请参考并根据实际硬件修改。
#include "fatfs_conf.h"
#include "fs_config.h"
#include "los_config.h"
#include "ram_virt_flash.h"
#include "los_fs.h"struct fs_cfg {CHAR *mount_point;struct PartitionCfg partCfg;
};INT32 FatfsLowLevelInit()
{INT32 ret;INT32 i;UINT32 addr;int data = FMT_FAT32;const char * const pathName[FF_VOLUMES] = {FF_VOLUME_STRS};HalLogicPartition *halPartitionsInfo = getPartitionInfo(); /* 获取长度和起始地址的函数,请根据实际单板适配 */INT32 lengthArray[FF_VOLUMES] = {25, 25, 25, 25};INT32 addrArray[FF_VOLUMES];/* 配置各分区的地址和长度,请根据实际单板适配 */for (i = 0; i < FF_VOLUMES; i++) {addr = halPartitionsInfo[FLASH_PARTITION_DATA1].partitionStartAddr + i * 0x10000;addrArray[i] = addr;FlashInfoInit(i, addr);}/* 配置分区信息,请根据实际单板适配 */SetupDefaultVolToPartTable();ret = LOS_DiskPartition("spinorblk0", "vfat", lengthArray, addrArray, FF_VOLUMES);printf("%s: DiskPartition %s\n", __func__, (ret == 0) ? "succeed" : "failed");if (ret != 0) {return -1;}ret = LOS_PartitionFormat("spinorblk0p0", "vfat", &data);printf("%s: PartitionFormat %s\n", __func__, (ret == 0) ? "succeed" : "failed");if (ret != 0) {return -1;}ret = mount("spinorblk0p0", "/system", "vfat", 0, &data);printf("%s: mount fs on '%s' %s\n", __func__, pathName[0], (ret == 0) ? "succeed" : "failed");if (ret != 0) {return -1;}return 0;
}
开发流程
说明:
- FATFS文件与目录操作:
- 单个文件大小不超过4G。
- 支持同时打开的文件数最大为FAT_MAX_OPEN_FILES,文件夹数最大为FAT_MAX_OPEN_DIRS。
- 暂不支持根目录管理,文件/目录名均以分区名开头,例如“user/testfile”就是在“user”分区下名为“testfile”的文件或目录。
- 若需要同时多次打开同一文件,必须全部使用只读方式(O_RDONLY)。以可写方式(O_RDWR、O_WRONLY等)只能打开一次。
- 读写指针未分离,例如以O_APPEND(追加写)方式打开文件后,读指针也在文件尾,从头读文件前需要用户手动置位。
- 暂不支持文件与目录的权限管理。
- stat及fstat接口暂不支持查询修改时间、创建时间和最后访问时间。微软FAT协议不支持1980年以前的时间。
- FATFS分区挂载与卸载:
- 支持以只读属性挂载分区。当mount函数的入参为MS_RDONLY时,所有的带有写入的接口,如write、mkdir、unlink,以及非O_RDONLY属性的open,将均被拒绝。
- mount支持通过MS_REMOUNT标记修改已挂载分区的权限。
- 在umount操作前,需确保所有目录及文件全部关闭。
- umount2支持通过MNT_FORCE参数强制关闭所有文件与文件夹并umount,但可能造成数据丢失,请谨慎使用。
- FATFS支持重新划分存储设备分区、格式化分区,对应接口为fatfs_fdisk与fatfs_format:
- 在fatfs_format操作之前,若需要格式化的分区已挂载,需确保分区中的所有目录及文件全部关闭,并且分区umount。
- 在fatfs_fdisk操作前,需要该设备中的所有分区均已umount。
- fatfs_fdisk与fatfs_format会造成设备数据丢失,请谨慎使用。
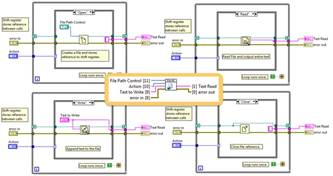
编程实例
实例描述
本实例实现以下功能:
-
创建目录“system/test”
-
在“system/test”目录下创建文件“file.txt”
-
在文件起始位置写入“Hello OpenHarmony!”
-
将文件内容刷入设备中
-
设置偏移到文件起始位置
-
读取文件内容
-
关闭文件
-
删除文件
-
删除目录
示例代码
前提条件:
系统已将设备分区挂载到目录,qemu默认已挂载system。
在kernel/liteos_m目录下执行 make menuconfig 命令配置"FileSystem->Enable FS VFS"开启FS功能;
开启FS后出现新选项“Enable FAT”开启FAT。
代码实现如下:
本演示代码在 ./kernel/liteos_m/testsuites/src/osTest.c 中编译验证,在TestTaskEntry中调用验证入口函数ExampleFatfs。
#include <stdio.h>
#include <string.h>
#include "sys/stat.h"
#include "fcntl.h"
#include "unistd.h"#define BUF_SIZE 20
#define TEST_ROOT "system" /* 测试的根目录请根据实际情况调整 */
VOID ExampleFatfs(VOID)
{int ret;int fd;ssize_t len;off_t off;char dirName[BUF_SIZE] = TEST_ROOT"/test";char fileName[BUF_SIZE] = TEST_ROOT"/test/file.txt";char writeBuf[BUF_SIZE] = "Hello OpenHarmony!";char readBuf[BUF_SIZE] = {0};/* 创建测试目录 */ret = mkdir(dirName, 0777);if (ret != LOS_OK) {printf("mkdir failed.\n");return;}/* 创建可读写测试文件 */fd = open(fileName, O_RDWR | O_CREAT, 0777);if (fd < 0) {printf("open file failed.\n");return;}/* 将writeBuf中的内容写入文件 */len = write(fd, writeBuf, strlen(writeBuf));if (len != strlen(writeBuf)) {printf("write file failed.\n");return;}/* 将文件内容刷入存储设备中 */ret = fsync(fd);if (ret != LOS_OK) {printf("fsync failed.\n");return;}/* 将读写指针偏移至文件头 */off = lseek(fd, 0, SEEK_SET);if (off != 0) {printf("lseek failed.\n");return;}/* 将文件内容读出至readBuf中,读取长度为readBuf大小 */len = read(fd, readBuf, sizeof(readBuf));if (len != strlen(writeBuf)) {printf("read file failed.\n");return;}printf("%s\n", readBuf);/* 关闭测试文件 */ret = close(fd);if (ret != LOS_OK) {printf("close failed.\n");return;}/* 删除测试文件 */ret = unlink(fileName);if (ret != LOS_OK) {printf("unlink failed.\n");return;}/* 删除测试目录 */ret = rmdir(dirName);if (ret != LOS_OK) {printf("rmdir failed.\n");return;}return;
}
结果验证
编译运行得到的结果为:
Hello OpenHarmony!
LittleFS
基本概念
LittleFS是一个小型的Flash文件系统,它结合日志结构(log-structured)文件系统和COW(copy-on-write)文件系统的思想,以日志结构存储元数据,以COW结构存储数据。这种特殊的存储方式,使LittleFS具有强大的掉电恢复能力(power-loss resilience)。分配COW数据块时LittleFS采用了名为统计损耗均衡的动态损耗均衡算法,使Flash设备的寿命得到有效保障。同时LittleFS针对资源紧缺的小型设备进行设计,具有极其有限的ROM和RAM占用,并且所有RAM的使用都通过一个可配置的固定大小缓冲区进行分配,不会随文件系统的扩大占据更多的系统资源。
当在一个资源非常紧缺的小型设备上,寻找一个具有掉电恢复能力并支持损耗均衡的Flash文件系统时,LittleFS是一个比较好的选择。
开发指导
移植LittleFS到新硬件设备上,需要在初始化flash驱动后,完成设备分区。
设备分区接口:int LOS_DiskPartition(const char *dev, const char *fsType, int *lengthArray, int *addrArray, int partNum);
- dev:设备名称
- fsType:文件系统类型, “littlefs”
- lengthArray:该设备上各分区的长度列表
- addrArray:该设备上各分区的起始地址列表
- partNum:分区的个数
格式化接口:int LOS_PartitionFormat(const char *partName, char *fsType, void *data);
- partName:分区名称
- fsType:文件系统类型, “littlefs”
- data:私有数据 传入(VOID *)struct fs_cfg
mount接口:int mount(const char *source, const char *target, const char *filesystemtype, unsigned long mountflags, const void *data);
- source:分区名称
- target:挂载路径
- filesystemtype:文件系统类型,“littlefs”
- mountflags:mount配置参数
- data:私有数据,传入(VOID *)struct fs_cfg
本参考代码已在 ./device/qemu/arm_mps2_an386/liteos_m/board/fs/fs_init.c 中实现,M核qemu上可直接使用,请参考并根据实际硬件修改。
#include "los_config.h"
#include "ram_virt_flash.h"
#include "los_fs.h"struct fs_cfg {CHAR *mount_point;struct PartitionCfg partCfg;
};INT32 LfsLowLevelInit()
{INT32 ret;struct fs_cfg fs[LOSCFG_LFS_MAX_MOUNT_SIZE] = {0};HalLogicPartition *halPartitionsInfo = getPartitionInfo(); /* 获取长度和起始地址的函数,请根据实际单板适配 */INT32 lengthArray[2];lengthArray[0]= halPartitionsInfo[FLASH_PARTITION_DATA0].partitionLength;INT32 addrArray[2];addrArray[0] = halPartitionsInfo[FLASH_PARTITION_DATA0].partitionStartAddr;ret = LOS_DiskPartition("flash0", "littlefs", lengthArray, addrArray, 2);printf("%s: DiskPartition %s\n", __func__, (ret == 0) ? "succeed" : "failed");if (ret != 0) {return -1;}fs[0].mount_point = "/littlefs";fs[0].partCfg.partNo = 0;fs[0].partCfg.blockSize = 4096; /* 4096, lfs block size */fs[0].partCfg.blockCount = 1024; /* 2048, lfs block count */fs[0].partCfg.readFunc = virt_flash_read; /* flash读函数,请根据实际单板适配 */fs[0].partCfg.writeFunc = virt_flash_write; /* flash写函数,请根据实际单板适配 */fs[0].partCfg.eraseFunc = virt_flash_erase; /* flash擦函数,请根据实际单板适配 */fs[0].partCfg.readSize = 256; /* 256, lfs read size */fs[0].partCfg.writeSize = 256; /* 256, lfs prog size */fs[0].partCfg.cacheSize = 256; /* 256, lfs cache size */fs[0].partCfg.lookaheadSize = 16; /* 16, lfs lookahead size */fs[0].partCfg.blockCycles = 1000; /* 1000, lfs block cycles */ret = LOS_PartitionFormat("flash0", "littlefs", &fs[0].partCfg);printf("%s: PartitionFormat %s\n", __func__, (ret == 0) ? "succeed" : "failed");if (ret != 0) {return -1;}ret = mount(NULL, fs[0].mount_point, "littlefs", 0, &fs[0].partCfg);printf("%s: mount fs on '%s' %s\n", __func__, fs[0].mount_point, (ret == 0) ? "succeed" : "failed");if (ret != 0) {return -1;}return 0;
}
其中.readFunc,.writeFunc,.eraseFunc分别对应该硬件平台上的底层的读写\擦除等接口。
readSize 每次读取的字节数,可以比物理读单元大以改善性能,这个数值决定了读缓存的大小,但值太大会带来更多的内存消耗。
writeSize 每次写入的字节数,可以比物理写单元大以改善性能,这个数值决定了写缓存的大小,必须是readSize的整数倍,但值太大会带来更多的内存消耗。
blockSize 每个擦除块的字节数,可以比物理擦除单元大,但此数值应尽可能小因为每个文件至少会占用一个块。必须是writeSize的整数倍。
blockCount 可以被擦除的块数量,这取决于块设备的容量及擦除块的大小。
示例代码
前提条件:
系统已将设备分区挂载到目录,qemu默认已挂载/littlefs。
在kernel/liteos_m目录下执行 make menuconfig 命令配置"FileSystem->Enable FS VFS"开启FS功能;
开启FS后出现新选项“Enable Little FS”开启littlefs。
代码实现如下:
本演示代码在 ./kernel/liteos_m/testsuites/src/osTest.c 中编译验证,在TestTaskEntry中调用验证入口函数ExampleLittlefs。
#include <stdio.h>
#include <string.h>
#include "sys/stat.h"
#include "fcntl.h"
#include "unistd.h"#define BUF_SIZE 20
#define TEST_ROOT "/littlefs" /* 测试的根目录请根据实际情况调整 */
VOID ExampleLittlefs(VOID)
{int ret;int fd;ssize_t len;off_t off;char dirName[BUF_SIZE] = TEST_ROOT"/test";char fileName[BUF_SIZE] = TEST_ROOT"/test/file.txt";char writeBuf[BUF_SIZE] = "Hello OpenHarmony!";char readBuf[BUF_SIZE] = {0};/* 创建测试目录 */ret = mkdir(dirName, 0777);if (ret != LOS_OK) {printf("mkdir failed.\n");return;}/* 创建可读写测试文件 */fd = open(fileName, O_RDWR | O_CREAT, 0777);if (fd < 0) {printf("open file failed.\n");return;}/* 将writeBuf中的内容写入文件 */len = write(fd, writeBuf, strlen(writeBuf));if (len != strlen(writeBuf)) {printf("write file failed.\n");return;}/* 将文件内容刷入存储设备中 */ret = fsync(fd);if (ret != LOS_OK) {printf("fsync failed.\n");return;}/* 将读写指针偏移至文件头 */off = lseek(fd, 0, SEEK_SET);if (off != 0) {printf("lseek failed.\n");return;}/* 将文件内容读出至readBuf中,读取长度为readBuf大小 */len = read(fd, readBuf, sizeof(readBuf));if (len != strlen(writeBuf)) {printf("read file failed.\n");return;}printf("%s\n", readBuf);/* 关闭测试文件 */ret = close(fd);if (ret != LOS_OK) {printf("close failed.\n");return;}/* 删除测试文件 */ret = unlink(fileName);if (ret != LOS_OK) {printf("unlink failed.\n");return;}/* 删除测试目录 */ret = rmdir(dirName);if (ret != LOS_OK) {printf("rmdir failed.\n");return;}return LOS_OK;
}结果验证
首次编译运行得到的结果为:
Hello OpenHarmony!
相关文章:
OpenHarmony(鸿蒙南向开发)——轻量系统内核(LiteOS-M)【扩展组件】
往期知识点记录: 鸿蒙(HarmonyOS)应用层开发(北向)知识点汇总 鸿蒙(OpenHarmony)南向开发保姆级知识点汇总~ 持续更新中…… C支持 基本概念 C作为目前使用最广泛的编程语言之一,…...
)
官方ROM 免费下载! 王者归来! 华为秘盒media Q M310(续)
最近在捣鼓电视盒子, 前帖讨论了如何拯救华为华为秘盒media Q M310, 详情请点击这里! https://blog.csdn.net/weixin_62598385/article/details/142658048 CSDN上有精简版的M310 ROM下载, 但是我点不进去, 要收年费&am…...

【Docker】05-Docker部署前端项目
1. nginx.conf worker_processes 1;events {worker_connections 1024; }http {include mime.types;default_type application/json;sendfile on;keepalive_timeout 65;server {listen 18080;# 指定前端项目所在的位置location / {root /usr/share/nginx…...

SQL进阶技巧:如何优化NULL值引发的数据倾斜问题?
目录 0 场景描述 1 问题分析 1.1 问题剖析 1.2 解决方案 2 小结 0 场景描述 实际业务中有些大量的null值或者一些无意义的数据参与到计算作业中,表中有大量的null值,如果表之间进行join操作,就会有shuffle产生,这样所有的null值都会被分配到一个reduce中,必然产生数…...

【09】纯血鸿蒙HarmonyOS NEXT星河版开发0基础学习笔记-Class类基础全解(属性、方法、继承复用、判断)
序言: 本文详细讲解了关于我们在程序设计中所用到的class类的各种参数及语法。 笔者也是跟着B站黑马的课程一步步学习,学习的过程中添加部分自己的想法整理为笔记分享出来,如有代码错误或笔误,欢迎指正。 B站黑马的课程链接&am…...

快速提升波段交易技能:4种实用策略分享
每个交易员的交易偏好是各不相同的,有人偏爱短线交易的迅速反应,有人钟情于中长线的稳健布局,还有人则热衷于波段交易的灵活操作。我们经常探讨短线与中长线的策略,但你了解波段交易的策略吗? 波段交易是什么…...

LeetCode 11 Container with Most Water 解题思路和python代码
题目: You are given an integer array height of length n. There are n vertical lines drawn such that the two endpoints of the ith line are (i, 0) and (i, height[i]). Find two lines that together with the x-axis form a container, such that the co…...

【深度学习】损失函数
损失函数(Loss Function)是机器学习和深度学习模型中的一个核心概念,它用于衡量模型的预测输出与真实标签之间的差异。通过优化(最小化)损失函数,模型可以不断调整其内部参数,提升预测性能。不同…...

力扣 中等 46.全排列
文章目录 题目介绍题解 题目介绍 题解 代码如下: class Solution {List<List<Integer>> res new ArrayList<>();// 存放符合条件结果的集合List<Integer> path new ArrayList<>();// 用来存放符合条件结果boolean[] used; // 标记…...

LabVIEW机床加工监控系统
随着制造业的快速发展,机床加工的效率与稳定性成为企业核心竞争力的关键。传统的机床监控方式存在效率低、无法远程监控的问题。为了解决这些问题,开发了一种基于LabVIEW的机床加工监控系统,通过实时监控机床状态,改进生产流程&am…...

第五届智能设计国际会议(ICID 2024)
文章目录 一、会议详情二、重要信息三、大会介绍四、出席嘉宾五、征稿主题六、咨询 一、会议详情 二、重要信息 大会官网:https://ais.cn/u/vEbMBz提交检索:EI Compendex、IEEE Xplore、Scopus大会时间:2024年10月25-27日大会地点࿱…...

厨房用品分割系统源码&数据集分享
厨房用品分割系统源码&数据集分享 [yolov8-seg-C2f-DCNV3&yolov8-seg-AFPN-P345等50全套改进创新点发刊_一键训练教程_Web前端展示] 1.研究背景与意义 项目参考ILSVRC ImageNet Large Scale Visual Recognition Challenge 项目来源AAAI Global Al ln…...

【HTTPS】深入解析 https
我的主页:2的n次方_ 1. 背景介绍 在使用 http 协议的时候是不安全的,可能会出现运营商劫持等安全问题,运营商通过劫持 http 流量,篡改返回的网页内容,例如广告业务,可能会通过 Referer 字段 来统计是…...

Axios 快速入门
什么是Ajax Ajax 是一种通过 JavaScript 发送异步请求的技术,它的核心是使用 XMLHttpRequest 对象来与服务器交换数据。这种方式较为繁琐,因为需要手动处理请求状态和响应,并且编写的代码往往比较冗长。 相较之下,Axios 是一个基于…...
LabVIEW提高开发效率技巧----调度器设计模式
在LabVIEW开发中,针对多任务并行的需求,使用调度器设计模式(Scheduler Pattern)可以有效地管理多个任务,确保它们根据优先级或时间间隔合理执行。这种模式在需要多任务并发执行时特别有用,尤其是在实时系统…...

python之认识变量
1、变量 1.1、定义 字面意思来看,会发生改变的量称为变量。 相反的,如果有一个不会发生改变的量,它应该称为不变量,即常量。 1.2、引入变量的原因 主要是为了方便程序员动态的管理、操控数据。 1.3、变量的三要素 名称 类型…...

c++应用网络编程之十Linux下的Poll模式
一、Poll模式 在上一篇文章中提到了Select模式的缺点。既然有缺点,就要改正。但是直接在Select模式上修改不太现实,那么就推出一个新的模式不更香么?poll模式就应运而生了。不过,罗马不是一天建成的,poll模式也只是对…...

[C++][第三方库][RabbitMq]详细讲解
目录 1.介绍2.安装1.RabbitMq2.客户端库 3.AMQP-CPP 简单使用1.介绍2.使用 4.类与接口1.Channel2.ev 5.使用1.publish.cc2.consume.cc3.makefile 1.介绍 RabbitMQ:消息队列组件,实现两个客户端主机之间消息传输的功能(发布&订阅)核心概念࿱…...

Next.js 详解
Next.js是一个基于React的开源JavaScript框架,由Vercel(原Zeit)公司开发。它旨在简化React应用的构建过程,并提供了一系列强大的功能来优化性能和开发体验。以下是对Next.js的详细解析: 一、核心特性 服务器端渲染&…...

pygame--超级马里奥(万字详细版)
超级马里奥点我下载https://github.com/marblexu/PythonSuperMario 1.游戏介绍 小时候的经典游戏,代码参考了github上的项目Mario-Level-1,使用pygame来实现,从中学习到了横版过关游戏实现中的一些处理方法。原项目实现了超级玛丽的第一个小…...

工具调用优化:减少API延迟对Agent性能的影响
《工具调用优化全指南:彻底解决API延迟拖累大模型Agent性能的痛点》 副标题:从原理到落地,覆盖缓存、并行、调度、轻量化改造全链路可复现方案 第一部分:引言与基础 1.1 摘要/引言 你有没有遇到过这种场景:辛辛苦苦开发的智能Agent功能非常强大,能查订单、搜资料、算数…...

全志T113-S3开发板网络配置实战:从DHCP到静态IP与故障排查
1. 项目概述:从零上手T113-S3的网络配置刚拿到一块新的全志T113-S3开发板,比如眺望电子的EVM-T113-S3,第一件事你会做什么?我的习惯是,先把它“连上网”。这听起来简单,但却是后续所有高级操作——无论是通…...
)
Linux ln 软硬链接详解——底层原理+生产实战+彻底区分(零踩坑)
前言很多新手永远分不清软硬链接,只会背“软链接像快捷方式、硬链接像副本”,一旦遇到生产删文件、日志切割、程序部署就翻车。本文从inode底层原理讲起,配合完整实战、对比、生产场景,让你彻底吃透 ln 软硬链接,面试、…...

2026免费照片去水印软件app排行榜 | 照片去水印怎么去?最新推荐工具对比
照片水印去除需求在2026年越来越普遍,无论是整理个人相册还是做内容素材处理,找到一款趁手的去水印工具能节省大量时间。本文对标当前免费照片去水印软件app的主流选择进行了全面测评,并整理了一份排行榜式的推荐清单,帮你快速定位…...

ChatGPT Plus 怎么购买?2026 开通教程
如果你还在犹豫是否有必要开通 Plus,可以先通过AI模型聚合平台 做一些基础体验,对比不同模型在写代码、改文档、做总结时的效果,再决定要不要正式升级 ChatGPT Plus。到了 2026 年,ChatGPT 已经不只是“聊天工具”,更像…...

高性价比塑料链板输送机厂家排行适配指南
随着2026年《工业输送设备安全生产通用规范》正式落地,国内输送设备行业的准入门槛和生产标准迎来新一轮调整,新规对各领域使用的输送设备提出了更明确的合规要求,也给中小企业选购设备提供了清晰的参考标准。2026年输送设备安全生产新规核心…...

写给前端的 CANN-GraphCompiler:昇腾图编译器到底是啥?
写给前端的 CANN-GraphCompiler:昇腾图编译器到底是啥? 之前有兄弟问:“哥,PyTorch 模型怎么在昇腾上跑?中间有什么编译过程?” 好问题。今天一次说清楚。 GraphCompiler 是啥? GraphCompiler 是…...
)
收藏必备!小白程序员轻松上手大模型:RAG技术实战指南(含评测体系)
本文深入浅出地解析了RAG(检索增强生成)技术在大模型开发中的应用,覆盖了从文档加载、智能切分到索引构建、检索优化、生成调优的全链路实战指南,并介绍了进阶的Graph RAG和多跳推理。特别强调了“可测、可调、可信赖”的RAG工程化…...

如何打破闭源代码智能模型的垄断?DeepSeek-Coder-V2的技术突围与实践指南
如何打破闭源代码智能模型的垄断?DeepSeek-Coder-V2的技术突围与实践指南 【免费下载链接】DeepSeek-Coder-V2 DeepSeek-Coder-V2: Breaking the Barrier of Closed-Source Models in Code Intelligence 项目地址: https://gitcode.com/GitHub_Trending/de/DeepSe…...

Chrome密码恢复终极指南:如何安全找回所有浏览器保存的密码
Chrome密码恢复终极指南:如何安全找回所有浏览器保存的密码 【免费下载链接】chromepass Get all passwords stored by Chrome on WINDOWS. 项目地址: https://gitcode.com/gh_mirrors/chr/chromepass 你是否曾经因为忘记某个重要网站的密码而焦虑࿱…...