超像素提取加svm训练,鼠标点击选择标签(左键为正样本,右键为负样本)
自己写的demo记个笔记用
替换掉图片路径和保存路径svm训练的模型路径就可以跑
效果我觉的不行,目前也不知到如何优化、希望有大佬可以给点建议
流程
处理超像素
选择超像素
提取HOG、颜色直方图、LBP直方图特征
训练
预测
#include <iostream>
#include <opencv2/opencv.hpp>
#include <opencv2/ximgproc.hpp>
#include <opencv2/ml.hpp>using namespace cv;
using namespace std;
using namespace cv::ml;
Mat g_LabelSlic;
Mat g_MaskSlic;
int g_NumSuperPixels;//目标图像和标签
multimap<int, Mat>g_mapImgSuperPixelsOfTarget;
multimap<int, Mat>g_mapImgSuperPixelsOfNonTarget;struct MouseCallbackData {Mat img; // 原始图像Mat imgClone; // 克隆图像
};Mat GetSuperPixelsByLabel(const Mat& img, int superpixelID)
{int minX = img.cols, minY = img.rows, maxX = 0, maxY = 0;for (int y = 0; y < img.rows; y++) {for (int x = 0; x < img.cols; x++) {if (g_LabelSlic.at<int>(y, x) == superpixelID) {// 更新边界框坐标if (x < minX) minX = x;if (y < minY) minY = y;if (x > maxX) maxX = x;if (y > maxY) maxY = y;}}}// 确保边界框有效if (minX > maxX || minY > maxY) {cout << "未找到有效的超像素!" << endl;return Mat(); }Rect superPixelBoundingBox(minX, minY, maxX - minX + 1, maxY - minY + 1);Mat croppedRegion = img(superPixelBoundingBox).clone(); for (int y = 0; y < croppedRegion.rows; y++) {for (int x = 0; x < croppedRegion.cols; x++) {int origX = x + minX;int origY = y + minY;if (g_LabelSlic.at<int>(origY, origX) != superpixelID) {croppedRegion.at<Vec3b>(y, x) = Vec3b(0, 0, 0); }}}return croppedRegion;
}vector<float> GetHOGDescriptor(Mat img)
{if (img.empty()) {std::cerr << "输入图像为空!" << std::endl;return {};}resize(img, img, Size(64, 64));Mat imgGray;cvtColor(img, imgGray, COLOR_BGR2GRAY);HOGDescriptor hog(Size(32, 32), // 图像窗口大小Size(8, 8), // 块大小Size(4, 4), // 块步长Size(4, 4), // cell 大小9 // 梯度方向 bins 数);vector<float> descriptors;hog.compute(imgGray, descriptors);return descriptors;
}// 提取 LBP 特征及其直方图
void ExtractLBPFeatures(Mat img, Mat& lbp, Mat& lbpHist)
{resize(img, img, Size(64, 64));// 转换为灰度图Mat gray;if (img.channels() == 3) {cvtColor(img, gray, COLOR_BGR2GRAY);}else {gray = img.clone();}// 初始化 LBP 特征矩阵lbp = Mat(gray.size(), CV_8UC1, Scalar(0));for (int y = 1; y < gray.rows - 1; y++) {for (int x = 1; x < gray.cols - 1; x++) {uchar center = gray.at<uchar>(y, x);uchar code = 0;code |= (gray.at<uchar>(y - 1, x - 1) > center) << 7; // 128code |= (gray.at<uchar>(y - 1, x) > center) << 6; // 64code |= (gray.at<uchar>(y - 1, x + 1) > center) << 5; // 32code |= (gray.at<uchar>(y, x + 1) > center) << 4; // 16code |= (gray.at<uchar>(y + 1, x + 1) > center) << 3; // 8code |= (gray.at<uchar>(y + 1, x) > center) << 2; // 4code |= (gray.at<uchar>(y + 1, x - 1) > center) << 1; // 2code |= (gray.at<uchar>(y, x - 1) > center); // 1lbp.at<uchar>(y, x) = code; // 将计算的 LBP 值存储}}// 计算 LBP 直方图const int histSize = 256; // LBP 特征值的范围const float range[] = { 0, 256 };const float* histRange = { range };calcHist(&lbp, 1, 0, Mat(), lbpHist, 1, &histSize, &histRange);normalize(lbpHist, lbpHist);
}Mat ExtractHSVHistogram(Mat img)
{resize(img, img, Size(64, 64));Mat hsv_img;cvtColor(img, hsv_img, cv::COLOR_BGR2HSV); vector<cv::Mat> hsv_planes;split(hsv_img, hsv_planes); // 分割 H, S, V 通道int histSize = 256; // 直方图分为 256 个区间float h_range[] = { 0, 180 }; // H 通道范围是 0-180float s_v_range[] = { 0, 256 }; // S 和 V 通道范围是 0-256const float* h_histRange = { h_range };const float* sv_histRange = { s_v_range };Mat h_hist, s_hist, v_hist;calcHist(&hsv_planes[0], 1, 0, cv::Mat(), h_hist, 1, &histSize, &h_histRange, true, false); // H 通道直方图calcHist(&hsv_planes[1], 1, 0, cv::Mat(), s_hist, 1, &histSize, &sv_histRange, true, false); // S 通道直方图calcHist(&hsv_planes[2], 1, 0, cv::Mat(), v_hist, 1, &histSize, &sv_histRange, true, false); // V 通道直方图// 合并 H, S, V 直方图Mat hist;hconcat(h_hist, s_hist, hist);hconcat(hist, v_hist, hist);Mat normalizedHist;normalize(hist, normalizedHist);return normalizedHist; // 返回归一化后的直方图
}void OnMouse(int event, int x, int y, int flags, void* param)
{MouseCallbackData* data = static_cast<MouseCallbackData*>(param);Mat& img = data->img;Mat& imgClone = data->imgClone;int mouseButtonClicked = 0;if (event == EVENT_LBUTTONDOWN) {mouseButtonClicked = 1;if (x >= 0 && x < img.cols && y >= 0 && y < img.rows) {int superpixelID = g_LabelSlic.at<int>(y, x);cout << "点击目标超像素ID: " << superpixelID << endl;g_mapImgSuperPixelsOfTarget.insert({ mouseButtonClicked, GetSuperPixelsByLabel(img, superpixelID) });circle(imgClone, Point(x, y), 3, Scalar(0, 255, 0), -1);imshow("Imageview", imgClone);}}else if (event == EVENT_RBUTTONDOWN) {mouseButtonClicked = 2;if (x >= 0 && x < img.cols && y >= 0 && y < img.rows) {int superpixelID = g_LabelSlic.at<int>(y, x);cout << "点击非目标超像素ID: " << superpixelID << endl;g_mapImgSuperPixelsOfNonTarget.insert({ mouseButtonClicked, GetSuperPixelsByLabel(img, superpixelID) });circle(imgClone, Point(x, y), 3, Scalar(0, 0, 255), -1);imshow("Imageview", imgClone);}}
}void SvmClassifier(multimap<int, vector<float>> HOGDescriptorOFTarget,multimap<int, Mat> lbpHistOFTarget,multimap<int, Mat> hsvHistOFTarget,multimap<int, vector<float>> HOGDescriptorOFNonTarget,multimap<int, Mat> lbpHistOFNonTarget,multimap<int, Mat> hsvHistOFNonTarget)
{cout << "star svm model train ..." << endl;Mat featureList;Mat labels;for (const auto& pair : HOGDescriptorOFTarget) {Mat hogMat(pair.second, CV_32F);normalize(hogMat, hogMat, 0, 1, NORM_MINMAX);hogMat = hogMat.reshape(1, 1);Mat lbpHist = lbpHistOFTarget.find(pair.first)->second;lbpHist.convertTo(lbpHist, CV_32F);lbpHist = lbpHist.reshape(1, 1); // 展平Mat hsvHist = hsvHistOFTarget.find(pair.first)->second;hsvHist.convertTo(hsvHist, CV_32F);hsvHist = hsvHist.reshape(1, 1); // 展平Mat combinedFeature;hconcat(hogMat, lbpHist, combinedFeature); hconcat(combinedFeature, hsvHist, combinedFeature); featureList.push_back(combinedFeature);labels.push_back(1); }for (const auto& pair : HOGDescriptorOFNonTarget) {Mat hogMat(pair.second, CV_32F);normalize(hogMat, hogMat, 0, 1, NORM_MINMAX); hogMat = hogMat.reshape(1, 1);Mat lbpHist = lbpHistOFNonTarget.find(pair.first)->second;lbpHist.convertTo(lbpHist, CV_32F);lbpHist = lbpHist.reshape(1, 1); Mat hsvHist = hsvHistOFNonTarget.find(pair.first)->second;hsvHist.convertTo(hsvHist, CV_32F);hsvHist = hsvHist.reshape(1, 1); Mat combinedFeature;hconcat(hogMat, lbpHist, combinedFeature);hconcat(combinedFeature, hsvHist, combinedFeature);featureList.push_back(combinedFeature);labels.push_back(0); }Mat trainingData;vconcat(featureList, trainingData); //Mat labelsMat;// = Mat(labels).reshape(1, 1);Mat labelsMat = labels;trainingData.convertTo(trainingData, CV_32F);labelsMat.convertTo(labelsMat, CV_32S);Ptr<SVM> svm = SVM::create();svm->setKernel(SVM::RBF);svm->setType(SVM::C_SVC);svm->trainAuto(trainingData,ROW_SAMPLE,labelsMat,10);/*svm->setC(1.5);svm->setGamma(0.5);svm->setTermCriteria(cv::TermCriteria(cv::TermCriteria::MAX_ITER, 200, 1e-6));svm->train(trainingData, ROW_SAMPLE, labelsMat);*/svm->save("C:/Users/svs/Desktop/svm_model2.xml"); // 保存训练好的模型
}void DrawSuperpixelRegion(Mat& img, int targetLabel) {for (int y = 0; y < img.rows; y++) {for (int x = 0; x < img.cols; x++) {if (g_LabelSlic.at<int>(y, x) == targetLabel) {img.at<Vec3b>(y, x) = Vec3b(0, 255, 0); }}}
}int main() {Mat img = imread("C:/Users/svs/Desktop/test.jpeg");if (img.empty()) {cerr << "无法读取图片!" << endl;return -1;}//图片进行超像素分割int region_size = 50;float ruler = 20.0;int num_iterations = 100;Ptr<ximgproc::SuperpixelSLIC> slic = ximgproc::createSuperpixelSLIC(img, ximgproc::SLICO,region_size, ruler);slic->iterate(num_iterations);slic->getLabels(g_LabelSlic);slic->getLabelContourMask(g_MaskSlic);g_NumSuperPixels = slic->getNumberOfSuperpixels();Mat imgWithContours;img.copyTo(imgWithContours, ~g_MaskSlic);imshow("Superpixel Contours", imgWithContours);cout << "请点击选择一个超像素区域...\n";namedWindow("Imageview", WINDOW_AUTOSIZE);imshow("Image", img);Mat imgClone = img.clone();imshow("Imageview", imgClone);MouseCallbackData data;data.img = img;data.imgClone = imgClone;setMouseCallback("Imageview", OnMouse, &data);// 等待用户按 'q' 退出while (true) {const char key = waitKey(0);if (key == 'q') {break;}}/*提取获取图片的特征*/multimap<int, vector<float> >HOGDescriptorOFTarget;multimap<int, Mat >lbpHistOFTarget;multimap<int, Mat >hsvHistOFTarget;multimap<int, vector<float> >HOGDescriptorOFNonTarget;multimap<int, Mat>lbpHistOFNonTarget;multimap<int, Mat>hisHistOFNonTarget;for (const auto& pair : g_mapImgSuperPixelsOfTarget) {vector<float> vectorHOGDescriptor = GetHOGDescriptor(pair.second);HOGDescriptorOFTarget.insert({ pair.first, vectorHOGDescriptor});Mat lbpImg, lbpHist;ExtractLBPFeatures(pair.second, lbpImg, lbpHist);lbpHistOFTarget.insert({ pair.first, lbpHist });Mat hsvHist;hsvHist = ExtractHSVHistogram(pair.second);hsvHistOFTarget.insert({ pair.first,hsvHist });/*imshow("true", pair.second);waitKey(0);*/}for (const auto& pair : g_mapImgSuperPixelsOfNonTarget){vector<float> vectorHOGDescriptor = GetHOGDescriptor(pair.second);HOGDescriptorOFNonTarget.insert({ pair.first,vectorHOGDescriptor });Mat lbpImg, lbpHist;ExtractLBPFeatures(pair.second, lbpImg, lbpHist);lbpHistOFNonTarget.insert({ pair.first, lbpHist });Mat hsvHist;hsvHist = ExtractHSVHistogram(pair.second);hisHistOFNonTarget.insert({ pair.first,hsvHist});/* imshow("false", pair.second);waitKey(0);*/}SvmClassifier(HOGDescriptorOFTarget, lbpHistOFTarget, hsvHistOFTarget,HOGDescriptorOFNonTarget,lbpHistOFNonTarget, hisHistOFNonTarget);Ptr<SVM> svm = SVM::load("C:/Users/svs/Desktop/svm_model2.xml");if (svm.empty()) {std::cerr << "模型加载失败!\n";return -1;}//进行预测cout << "star predict ...\n";multimap<int, Mat> testSuperPixelsImg;vector<float> testHOGDescriptor;Mat testLbpHist;Mat testHsvHist;// 遍历每个超像素块for (int superpixelID = 0; superpixelID < g_NumSuperPixels; ++superpixelID) {Mat superpixelRegion = GetSuperPixelsByLabel(img, superpixelID);testSuperPixelsImg.insert({ superpixelID, superpixelRegion });}for (const auto& pairs : testSuperPixelsImg) {/*imshow("test", pairs.second);waitKey(0);*/testHOGDescriptor = GetHOGDescriptor(pairs.second);Mat lbpImg;ExtractLBPFeatures(pairs.second, lbpImg,testLbpHist);testHsvHist = ExtractHSVHistogram(pairs.second);if (testHOGDescriptor.empty()){cerr << "HOG特征为空,超像素ID: \n";}if (testLbpHist.empty()){cerr << "LBP特征为空,超像素ID: \n";}if(testHsvHist.empty()){cerr << "Hsv直方图为空,超像素ID:\n";}Mat testHogMat(testHOGDescriptor, CV_32F);normalize(testHogMat, testHogMat, 0, 1, NORM_MINMAX);testHogMat = testHogMat.reshape(1, 1);testLbpHist.convertTo(testLbpHist, CV_32F);testLbpHist = testLbpHist.reshape(1, 1); testHsvHist.convertTo(testHsvHist, CV_32F);testHsvHist = testHsvHist.reshape(1, 1); Mat combinedFeature;hconcat(testHogMat, testLbpHist, combinedFeature);hconcat(combinedFeature, testHsvHist, combinedFeature);// 进行预测float response;response = svm->predict(combinedFeature);if (response == 1) {}else {DrawSuperpixelRegion(img, pairs.first);}}imshow("Image with Green Superpixel", img);cout << "predict successful\n";waitKey(0);destroyAllWindows();return 0;
}
相关文章:
)
超像素提取加svm训练,鼠标点击选择标签(左键为正样本,右键为负样本)
自己写的demo记个笔记用 替换掉图片路径和保存路径svm训练的模型路径就可以跑 效果我觉的不行,目前也不知到如何优化、希望有大佬可以给点建议 流程 处理超像素 选择超像素 提取HOG、颜色直方图、LBP直方图特征 训练 预测 #include <iostream> #include <…...

Vue 中引入 ECharts 的详细步骤与示例
在Vue项目中引入ECharts,可以让我们轻松地在前端页面中展示各种图表。ECharts 是一个基于 JavaScript 的开源可视化图表库,它提供了丰富的图表类型和强大的配置选项,使得在Vue项目中集成和使用变得非常方便。 一、准备工作 创建Vue项目&…...

在 EC2 AWS 中开启防火墙后将自己锁定在 SSH 之外
在搭建ftp时,开启了系统防火墙的几个端口,并且设置了防火墙开机自启。当设置好之后,关闭了putty,再次连接SSH时,发现连接错误。仔细一想,防火墙没有开启22端口,这不嘎了么,自己把自己…...

OpenGL 进阶系列02 - OpenGL绘制三角形的必要步骤
目录 一:概述 二:必要的绘制步骤 三:相关OpenGL API 含义: 1. glViewport 介绍 2. OpenGL的 VAO 介绍 3. OpenGL的VBO介绍 4. OpenGL的着色器 API 介绍 5. OpenGL 绘制API介绍 四:例子 一:概述 要使用 OpenGL 绘制一个三角形,通常需要几步,需要使用哪些必要的Open…...
)
MySql基础34题写题记录(11-20)
11、取得最后入职的5名员工 select ename from emp order by hiredate desc limit 5; 12、取得每个薪水等级有多少员工 先取每个员工的薪水等级 Select e.ename,s.grade grade From emp e Join salgrade s On e.sal between s.losal and s.hisal 接着直接分组求 Select …...
)
设计模式——单例模式(1)
一、写在前面 设计模式有23种,每一篇是一种模式,从简单到难,第一篇从最简单的单例模式试试水创建型模式 单例模式工厂方法模式抽象工厂模式原型模式建造者模式 结构型模式行为型模式 二、介绍 单例模式是指一个类只能创建出一个对象&#…...

剧本杀小程序:提升玩家游戏体验,带动经济效益
剧本杀作为一个新兴游戏方式,能够满足年轻人的社交需求,让大众体验到不太一样的人生,在角色中进行演绎。这种独特的游戏模式吸引了众多的年轻玩家,由此,剧本杀行业进入了爆发期。 如今,在科技的不断创新下…...

Linux系统通过编辑crontab来设置定时任务---定时关机
在Linux系统中,crontab 是用来设置周期性被执行的指令的守护进程。通过编辑 crontab,您可以安排定时任务,比如定时关机、定时备份文件、定时运行脚本等。以下是如何编辑 crontab 来设置定时任务的步骤: 打开终端:您可以…...
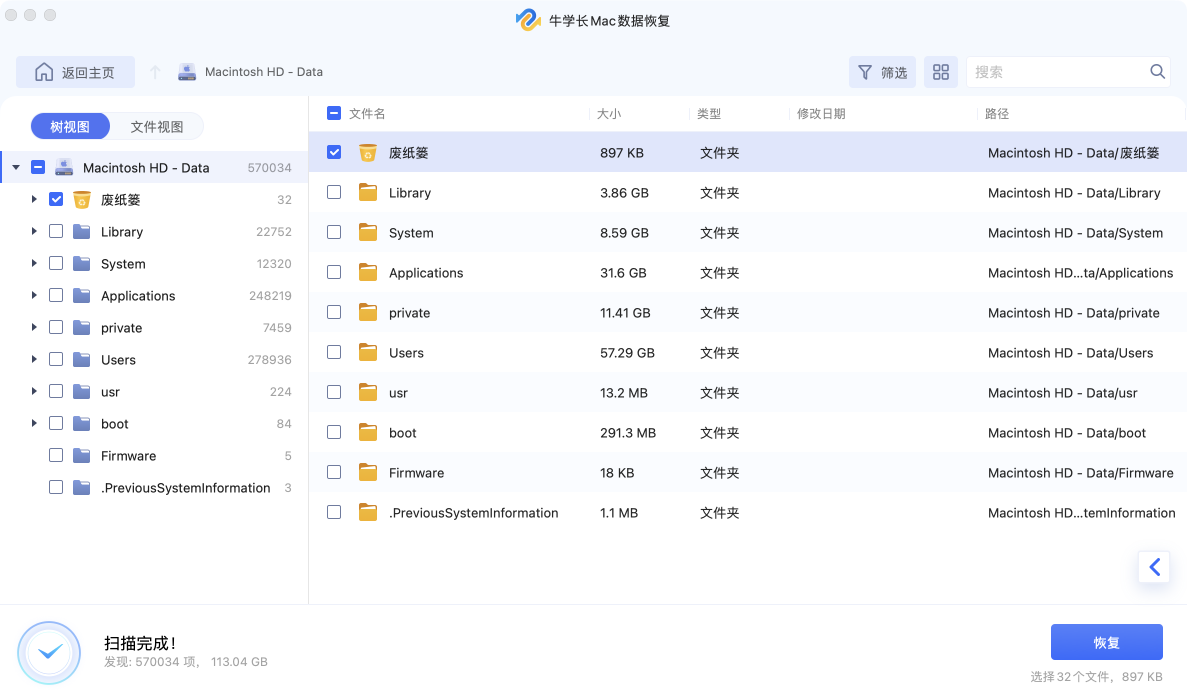
Mac电脑word文档误删,4个方法快速恢复
对于使用Mac的用户来说,丢失重要的Word文档可能会为学习或工作带来严重的影响。不过,幸运的是,关于mac word 文档恢复方法还是有很多的,通常帮助Mac用户轻松找回丢失的word文档。接下来,小编将介绍一些在Mac上恢复丢失…...

threejs-基础材质设置
一、介绍 主要内容:基础材质(贴图、高光、透明、环境、光照、环境遮蔽贴图) 主要属性: side: three.DoubleSide, //设置双面 color: 0xffffff, //颜色 map: texture, //纹理 transparent: true, // 透明度 aoMap: aoTexture, //ao贴图 aoMapIntensity: 1…...

【大模型开发】AI提示词框架:解锁ICIO、CRISPE、BROKE和RASCEF的强大潜力
作为一名经验丰富的程序员,您是否曾感到在与AI助手交互时难以获得理想的输出?本文将为从事AI开发或经常使用AI工具的技术人员介绍四个强大的AI提示词框架:ICIO、CRISPE、BROKE和RASCEF。这些框架能帮助您更有效地与AI模型沟通,提高工作效率。 1. ICIO框架:简洁而有力 IC…...

Rust学习如何更有信心?
关于如何学习Rust,在Hacker News上有一篇非常火的教程,作者通过自己的Rust学习经历,向大家指出了一条如何学习Rust的路径。 学习一门编程语言必不可少的是阅读技术书籍和编写代码,要想掌握Rust,两者的交替学习至关重要…...
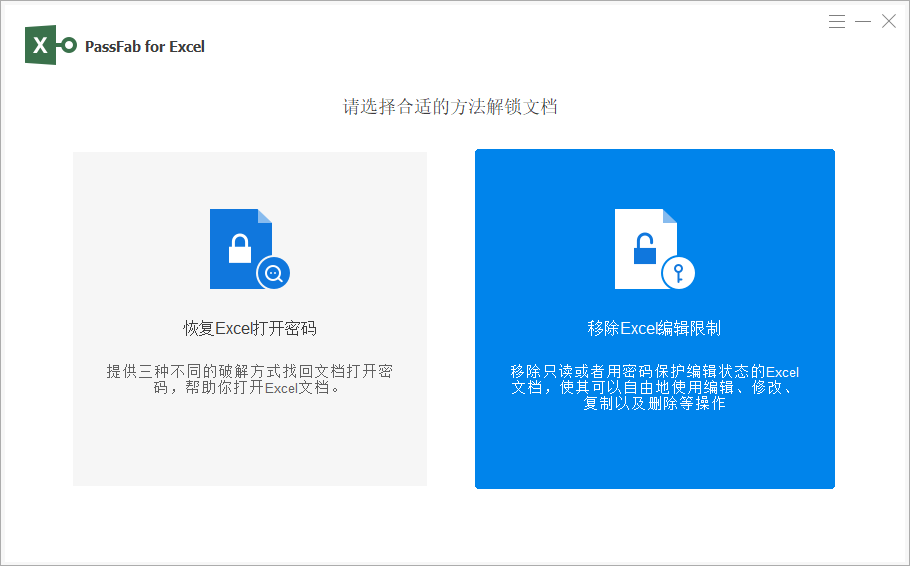
3个简单易懂的方法,教你马上掌握excel表格数据打印技巧
在EXCEL表格里制作表格后,表格的数据有可能不正好是一页,如果就这样打印出来,数据有可能不完整,表格也不美观,还浪费纸张,那么如何将表格打印在一张纸上呢?下面小编为你介绍几种方法和解决方案&…...

dbt 增量策略模型实战教程
上文我们介绍了增量策略的理论知识,本文结合实际场景介绍如何合理利用增量策略,内容包括应用场景、常见问题及解决方案。 应用场景 增量模型是定义如何增量向数据模型添加数据的有效方法——假设我们有描述信用卡交易的数据表——我们创建DBT模型&#…...

【含文档】基于Springboot+Android的校园论坛系统(含源码+数据库+lw)
1.开发环境 开发系统:Windows10/11 架构模式:MVC/前后端分离 JDK版本: Java JDK1.8 开发工具:IDEA 数据库版本: mysql5.7或8.0 数据库可视化工具: navicat 服务器: SpringBoot自带 apache tomcat 主要技术: Java,Springboot,mybatis,mysql,vue 2.视频演示地址 3.功能 系统定…...

Go版数据结构 -【8.4 快速排序】
8.4 快速排序 快速排序是一种分而治之的排序算法。它通过随机选择一个基准元素,将数组分为两部分。 一部分比基准元素小,另一部分比基准元素大,之后对两部分排序。 快速排序以其平均情况下的 O(n log n) 时间复杂度和良好的性能而广泛应用…...

达梦DBLINK访问ORACLE配置方法
目录 1、概述 2、测试环境 3、语法简介 4、配置访问DM的DBLINK 5、配置访问ORACLE的DBLINK 5.1 通过OCI配置 5.2 通过ODBC配置 1、概述 本文介绍了达梦DBLINK的配置方法。有3部分内容,1)达梦访问到达梦的配置方法;2)通过OC…...

基础知识1
目录 1、gcd最大公因数 2、最小公倍数 3、素数问题 ①简单数学求法 ②素数筛 ③线性筛 1、gcd最大公因数 int gcd(int a,int b){return b0?a:gcd(b,a%b);} 做题过程中,如果数据太大,需要边做边对分子分母进行约分 2、最小公倍数 int a,b;scanf(&…...
:对象)
网页前端开发之Javascript入门篇(9/9):对象
Javascript对象 什么是对象? 答:其概念跟 Python教程 的字典基本相似,虽然存有一些差异,不过对于目前的教程来讲可以忽略。 下面是对象的语法: var aaa {"弓" : "张","木" : "李",&…...

Oracle RAC IPC Send timeout detected问题分析处理
一、报错信息 今天在进行数据库巡检时,在集群节点1发现了IPC相关报错信息: 2024-10-10T10:22:06.84631708:00 IPC Receiver dump detected. Sender instance 2 Receiver pnum 277 ospid 377527 [oraclezxsszpt-sjkfwq1 (PPA6)], pser 124403 2024-10-1…...

告别Spoon客户端!手把手教你用这个Vue+SpringCloud的Kettle Web版开源工具
从桌面到云端:基于VueSpringCloud的Kettle Web化实践指南 对于长期使用Kettle Spoon客户端的ETL工程师而言,反复安装Java环境、处理客户端兼容性问题、在多台机器间同步配置已成为日常痛点。当团队需要协作开发或管理远程服务器上的数据集成任务时&…...

CANape实战:如何绕过CSMconfig识别问题,用VN5610A的Network模式连接ECAT ADMM模块
CANape高阶实战:绕过CSMconfig限制实现VN5610A与ECAT模块的Network模式直连 当工程师面对CSMconfig无法识别VN5610A网口的报错窗口时,往往会陷入传统配置路径的思维定式。这个看似简单的识别问题背后,实际上隐藏着新旧硬件架构更迭带来的工作…...
)
告别龟速采样!用DDIM加速你的扩散模型推理(附PyTorch代码)
加速扩散模型推理:DDIM核心原理与实战优化指南 在图像生成领域,扩散模型以其卓越的质量表现迅速成为研究热点,但传统DDPM(Denoising Diffusion Probabilistic Models)的致命缺陷在于其缓慢的采样速度——生成一张图片往…...

CentOS8实战:ZeroTier构建安全异地虚拟局域网
1. 为什么选择ZeroTier替代传统内网穿透方案 最近在帮朋友搭建远程办公环境时,遇到了一个典型问题:分布在三个不同物理位置的服务器需要像在同一个办公室内网那样互相访问。最初考虑使用FRP方案,但实测下来发现几个痛点:首先是带宽…...

从零到一:在个人PC上部署并集成ChatGLM-6B到Unity应用
1. 环境准备与模型下载 在个人PC上部署ChatGLM-6B需要先搞定三件事:硬件检查、软件环境搭建和模型文件获取。我的老款游戏本(i7-9750H RTX2060 6GB显存)实测可以流畅运行,关键在于正确的量化配置。 硬件检查要点: 显存…...

Zotero插件市场:三步快速上手的插件管理神器
Zotero插件市场:三步快速上手的插件管理神器 【免费下载链接】zotero-addons Zotero Add-on Market | Zotero插件市场 | Browsing, installing, and reviewing plugins within Zotero 项目地址: https://gitcode.com/gh_mirrors/zo/zotero-addons 想象一下&a…...

从零构建个人知识库:Go+React全栈项目RocketNotes实战解析
1. 项目概述:从零到一构建个人知识管理工具最近在整理个人笔记和代码片段时,发现了一个挺有意思的开源项目fynnfluegge/rocketnotes。乍一看这个名字,可能会联想到火箭(Rocket)和笔记(Notes)的结…...

Ruby中文分词利器Rurima:纯Ruby实现的高性能分词引擎详解
1. 项目概述:一个为Ruby打造的现代中文分词引擎在Ruby社区里,处理中文文本一直是个有点“硌脚”的活儿。如果你做过中文搜索、内容分析或者简单的词频统计,肯定遇到过这个经典难题:怎么把一串连续的中文字符,准确地切割…...

百度网盘直链解析工具:突破下载限速的Python解决方案
百度网盘直链解析工具:突破下载限速的Python解决方案 【免费下载链接】baidu-wangpan-parse 获取百度网盘分享文件的下载地址 项目地址: https://gitcode.com/gh_mirrors/ba/baidu-wangpan-parse 你是否曾经为百度网盘的下载速度而烦恼?作为国内最…...

从零构建可定制对话系统:模块化架构与RAG实战指南
1. 项目概述:从零构建一个可定制的对话系统最近在折腾一个挺有意思的东西,我把它叫做“定制化聊天系统”。起因很简单,市面上现成的聊天机器人,无论是开源的还是商业的,总感觉差了那么点意思。要么是功能太臃肿&#x…...