NeRF三维重建—神经辐射场Neural Radiance Field(二)体渲染相关
NeRF三维重建—神经辐射场Neural Radiance Field(二)体渲染相关
粒子采集部分
粒子采集的部分我们可以理解为,在已知粒子的情况下,对图片进行渲染的一个正向的过程。
- 空间坐标(x,y,z)
- 发射的光线通过相机模型成为图片上的像素坐标(u,v)
- 粒子颜色即为像素颜色
- (u, v)与(x, y, z)的公式如下:也就是之前在相机模型中提到的一些有关坐标转化的部分知识。

内参+外参来进行的
相反我们的任务是给定一张图片,我们需要的是在许多张图片中推导出相机为位姿信息。
- 可以看作是沿着某一条射线上的无数个发光点的“和”;
- 利用相机模型,反推射线
- 那么这个射线表示为:r(t)=o+td
- O为射线原点,d为方向,t为距离
- 极坐标表示
总结来说我们的这个过程就是相机模型的一个反向的过程表达。由像素(u,v)反推出像素的信息来。

在三维的空间中采样射线的信息。
这一部分就是我们有关的粒子采集的部分信息了。可以得到我们的原点和方向的信息。我们通过这两个信息就可以表示出这条射线了。
体渲染
我们最后得到的像素的颜色是无数个发光粒子在该射线长度上经过累计得到的和。(作为我们像素最终的颜色)。
我们在表示出的这条射线上采用一定的方法取发光粒子的值,最后通过积分就可以得出体渲染所得到的像素的位置坐标了。
r ( t ) = o + t d r(t)=o+td r(t)=o+td
在我们计算的时候这个t是离散化的,我们如何通过选择这个离散的t来进行计算呢?
- 方法1:设置near=2,far=6。在near和far之间均匀采样64个点
- 通过图像和相机的位姿,来计算表示一条射线。
- 在射线上均匀的采样了64个点
- 训练时,一张图片取1024个像素,
- 得到1024条射线,每条射线上采样64个粒子共1024*64个粒子
我们的输出就是粒子的密度和颜色值
对之前的模型的信息进行一定的补充:
γ ( p ) = ( sin ( 2 0 π p ) , cos ( 2 0 π p ) , … , sin ( 2 L − 1 ) , cos ( 2 L − 1 π p ) ) \gamma(p)=\left(\sin \left(2^{0} \pi p\right), \cos \left(2^{0} \pi p\right), \ldots, \sin \left(2^{L-1}\right), \cos \left(2^{L-1} \pi p\right)\right) γ(p)=(sin(20πp),cos(20πp),…,sin(2L−1),cos(2L−1πp))
- p需要归一化到[-1,1]
- 对于空间坐标x,L=10,r(x)是60D
- 对于视角坐标d,L= 4,r(d)是24D
- 在代码中,加上初始值:r(x)是63D,r(d)是27D
LOSS
- GT是图片某一像素的RGB
- 将该像素对应光线上的粒子颜色进行求和
- 粒子的颜色和:该像素颜色的预测值
- 粒子的颜色和]与像素颜色做MSE(均方误差损失)
L = ∑ r ∈ R ∥ C ^ ( r ) − C ( r ) ∥ 2 2 R 是每个batch的射线(1024条) \begin{array}{l} L=\sum_{r \in R}\|\hat{C}(r)-C(r)\|_{2}^{2}\\ R \text { 是每个batch的射线(1024条) } \end{array} L=∑r∈R∥C^(r)−C(r)∥22R 是每个batch的射线(1024条)
体渲染连续积分
C ( s ) ^ = ∫ 0 + ∞ T ( s ) σ ( s ) C ( s ) d s T ( s ) = e − ∫ 0 s σ ( t ) d t \begin{array}{l} \hat{C(s)}=\int_{0}^{+\infty} T(s) \sigma(s) C(s) d s \\ T(s)=e^{-\int_{0}^{s} \sigma(t) d t} \end{array} C(s)^=∫0+∞T(s)σ(s)C(s)dsT(s)=e−∫0sσ(t)dt
- T(s):在s点之前,光线没有被阻碍的概率.
- o(s):在s点处,光线碰击粒子(光线被粒子阻碍)的概率密度
- C(s):在s点处,粒子光出的颜色
- 各点的颜色和概率密度已知,要先求T(s)
每个点的体密度与颜色相乘在结合一下不透明度来进行说明。
理论推导部分说明:

- 我们对上面的公式进行推导首先推导T的公式
T ( s + d s ) = T ( s ) [ 1 − σ ( s ) d s ] T ( s + d s ) = T ( s ) − T ( s ) σ ( s ) d s T ( s + d s ) − T ( s ) = − T ( s ) σ ( s ) d s d T ( s ) = − T ( s ) σ ( s ) d s d T ( s ) T ( s ) = − σ ( s ) d s \begin{array}{l} T(s+d s)=T(s)[1-\sigma(s) d s] \\ T(s+d s)=T(s)-T(s) \sigma(s) d s \\ T(s+d s)-T(s)=-T(s) \sigma(s) d s \\ d T(s)=-T(s) \sigma(s) d s \\ \frac{d T(s)}{T(s)}=-\sigma(s) d s \end{array} T(s+ds)=T(s)[1−σ(s)ds]T(s+ds)=T(s)−T(s)σ(s)dsT(s+ds)−T(s)=−T(s)σ(s)dsdT(s)=−T(s)σ(s)dsT(s)dT(s)=−σ(s)ds
两边同时积分就可以得到:
∫ 0 t d T ( s ) T ( s ) = ∫ 0 t − σ ( s ) d s ∫ 0 t 1 T ( s ) d T ( s ) = ∫ 0 t − σ ( s ) d s ln T ( s ) ∣ 0 t = ∫ 0 t − σ ( s ) d s ln T ( t ) − ln T ( 0 ) = ∫ 0 t − σ ( s ) d s ln T ( t ) = ∫ 0 t − σ ( s ) d s T ( t ) = e ∫ 0 t − σ ( s ) d s \begin{aligned} \int_{0}^{t} \frac{d T(s)}{T(s)} & =\int_{0}^{t}-\sigma(s) d s \\ \int_{0}^{t} \frac{1}{T(s)} d T(s) & =\int_{0}^{t}-\sigma(s) d s \\ \left.\ln T(s)\right|_{0} ^{t} & =\int_{0}^{t}-\sigma(s) d s \\ \ln T(t)-\ln T(0) & =\int_{0}^{t}-\sigma(s) d s \\ \ln T(t) & =\int_{0}^{t}-\sigma(s) d s \\ T(t) & =e^{\int_{0}^{t}-\sigma(s) d s} \end{aligned} ∫0tT(s)dT(s)∫0tT(s)1dT(s)lnT(s)∣0tlnT(t)−lnT(0)lnT(t)T(t)=∫0t−σ(s)ds=∫0t−σ(s)ds=∫0t−σ(s)ds=∫0t−σ(s)ds=∫0t−σ(s)ds=e∫0t−σ(s)ds
因为是离散的数据我们要将之前推导出来的连续形式进行离散化的处理。
- 计算机只能处理离散化数据
- 将光线[O,s]划分为N个等间距区间[Tn→ Tn+1]
- n=0,1,2,…,N
- 间隔长度为on
C ^ ( r ) = ∑ i = 1 N T i ( 1 − e − σ i δ i ) c i where T i = e − ∑ j = 1 i − 1 σ j δ j \begin{array}{l} \hat{C}(r)=\sum_{i=1}^{N} T_{i}\left(1-e^{-\sigma_{i} \delta_{i}}\right) c_{i}\\ \text { where } T_{i}=e^{-\sum_{j=1}^{i-1} \sigma_{j} \delta_{j}} \end{array} C^(r)=∑i=1NTi(1−e−σiδi)ci where Ti=e−∑j=1i−1σjδj
下面我们补充我们的离散化公式的一个推导过程。
我们对每个光区贡献的光强进行累计操作。
C ^ = ∑ n = 0 N I ( T n → T n + 1 ) \hat{C}=\sum_{n=0}^{N} I\left(T_{n} \rightarrow T_{n+1}\right) C^=n=0∑NI(Tn→Tn+1)
I ( T n → T n + 1 ) = ∫ t n t n + 1 T ( t ) σ n C n d t = σ n C n ∫ t n t n + 1 T ( t ) d t = σ n C n ∫ t n t n + 1 e − ∫ 0 t σ ( s ) d s d t = σ n C n ∫ t n t n + 1 e − ( ∫ 0 t n σ ( s ) d s + ∫ t n t σ ( s ) d s ) d t = σ n C n ∫ t n t n + 1 e − ∫ 0 t n σ ( s ) d s e − ∫ t n t σ ( s ) d s d t = σ n C n T ( 0 → t n ) ∫ t n t n + 1 e − ∫ t n t σ ( s ) d s d t \begin{aligned} I\left(T_{n} \rightarrow T_{n+1}\right) & =\int_{t_{n}}^{t_{n+1}} T(t) \sigma_{n} C_{n} d t \\ & =\sigma_{n} C_{n} \int_{t_{n}}^{t_{n+1}} T(t) d t \\ & =\sigma_{n} C_{n} \int_{t_{n}}^{t_{n+1}} e^{-\int_{0}^{t} \sigma(s) d s} d t \\ & =\sigma_{n} C_{n} \int_{t_{n}}^{t_{n+1}} e^{-\left(\int_{0}^{t_{n}} \sigma(s) d s+\int_{t_{n}}^{t} \sigma(s) d s\right)} d t \\ & =\sigma_{n} C_{n} \int_{t_{n}}^{t_{n+1}} e^{-\int_{0}^{t_{n}} \sigma(s) d s} e^{-\int_{t_{n}}^{t} \sigma(s) d s} d t \\ & =\sigma_{n} C_{n} T\left(0 \rightarrow t_{n}\right) \int_{t_{n}}^{t_{n+1}} e^{-\int_{t_{n}}^{t} \sigma(s) d s} d t \end{aligned} I(Tn→Tn+1)=∫tntn+1T(t)σnCndt=σnCn∫tntn+1T(t)dt=σnCn∫tntn+1e−∫0tσ(s)dsdt=σnCn∫tntn+1e−(∫0tnσ(s)ds+∫tntσ(s)ds)dt=σnCn∫tntn+1e−∫0tnσ(s)dse−∫tntσ(s)dsdt=σnCnT(0→tn)∫tntn+1e−∫tntσ(s)dsdt
经过化简就可以得到最后的公式的形式:
I ( T n → T n + 1 ) = σ n C n T ( 0 → t n ) ∫ t n t n + 1 e − ∫ t n t σ n d s d t = σ n C n T ( 0 → t n ) ∫ t n t n + 1 e − σ n ( t − t n ) d t = σ n C n T ( 0 → t n ) [ − 1 σ n e − σ n ( t − t n ) ∣ t n t n + 1 ] = C n T ( 0 → t n ) ( 1 − e σ n δ n ) = C n e − ∑ i = 0 n − 1 σ i δ i ( 1 − e σ n δ n ) . \begin{aligned} I\left(T_{n} \rightarrow T_{n+1}\right) & =\sigma_{n} C_{n} T\left(0 \rightarrow t_{n}\right) \int_{t_{n}}^{t_{n+1}} e^{-\int_{t_{n}}^{t} \sigma_{n} d s} d t \\ & =\sigma_{n} C_{n} T\left(0 \rightarrow t_{n}\right) \int_{t_{n}}^{t_{n+1}} e^{-\sigma_{n}\left(t-t_{n}\right)} d t \\ & =\sigma_{n} C_{n} T\left(0 \rightarrow t_{n}\right)\left[-\left.\frac{1}{\sigma_{n}} e^{-\sigma_{n}\left(t-t_{n}\right)}\right|_{t_{n}} ^{t_{n+1}}\right] \\ & =C_{n} T\left(0 \rightarrow t_{n}\right)\left(1-e^{\sigma_{n} \delta_{n}}\right) \\ & =C_{n} e^{-\sum_{i=0}^{n-1} \sigma_{i} \delta_{i}}\left(1-e^{\sigma_{n} \delta_{n}}\right). \end{aligned} I(Tn→Tn+1)=σnCnT(0→tn)∫tntn+1e−∫tntσndsdt=σnCnT(0→tn)∫tntn+1e−σn(t−tn)dt=σnCnT(0→tn)[−σn1e−σn(t−tn) tntn+1]=CnT(0→tn)(1−eσnδn)=Cne−∑i=0n−1σiδi(1−eσnδn).
- 粗模型:输入均匀采样粒子,输出密度
- 细模型:根据密度,二次采样
- 最后输出:采用模型2的输出
- 粗模型和细模型结构相同
相关文章:
NeRF三维重建—神经辐射场Neural Radiance Field(二)体渲染相关
NeRF三维重建—神经辐射场Neural Radiance Field(二)体渲染相关 粒子采集部分 粒子采集的部分我们可以理解为,在已知粒子的情况下,对图片进行渲染的一个正向的过程。 空间坐标(x,y,z)发射的光线通过相机模型成为图片上…...

软件测试工程师:如何写出好的测试用例?
软件测试用例(Test Case)是软件测试过程中的一种详细文档或描述,用于描述在特定条件下,对软件系统或组件进行测试的步骤、输入数据、预期输出和预期行为。编写高质量的测试用例是确保软件质量的关键步骤之一。以下是一些编写优秀测试用例的建议ÿ…...

「图::连通」详解并查集并实现对应的功能 / 手撕数据结构(C++)
目录 概述 成员变量 创建销毁 根节点访问 路径压缩 启发式合并 复杂度 Code 概述 并查集,故名思议,能合并、能查询的集合,在图的连通性问题和许多算法优化上着广泛的使用。 这是一个什么数据结构呢? 一般来讲,并查集是…...

基于PSO粒子群优化的CNN-GRU-SAM网络时间序列回归预测算法matlab仿真
目录 1.算法运行效果图预览 2.算法运行软件版本 3.部分核心程序 4.算法理论概述 5.算法完整程序工程 1.算法运行效果图预览 (完整程序运行后无水印) PSO优化过程: PSO优化前后,模型训练对比: 数据预测对比: 误差回归对比&a…...

PyTorch 的 DataLoader 类介绍
DataLoader 类 功能与作用 PyTorch 是一个流行的开源机器学习库,它提供了一个名为 DataLoader 的类,用于加载数据集并将其封装成一个可迭代的对象。DataLoader 可以自动地将数据集划分为多个批次,并在训练过程中迭代地返回这些批次。是用于加…...

【设计模式系列】命令模式
目录 一、什么是命令模式 二、命令模式的角色 三、命令模式的典型应用场景 四、命令模式在Runnable中的应用 一、什么是命令模式 命令模式(Command Pattern)是一种行为设计模式,它将一个请求或简单操作封装为一个对象。这个模式提供了一种…...

uniapp中使用lottie实现JSON动画
uniapp中使用lottie实现JSON动画 不喜欢废话直接开干一、引入相关依赖二、在项目的目录新建目录结构三、操作步骤四、编写自定义组件代码五、组件的使用提一嘴更多lottie-web常用方法添加点击事件 不喜欢废话直接开干 一、引入相关依赖 npm install lottie-web # 如果有问题可…...
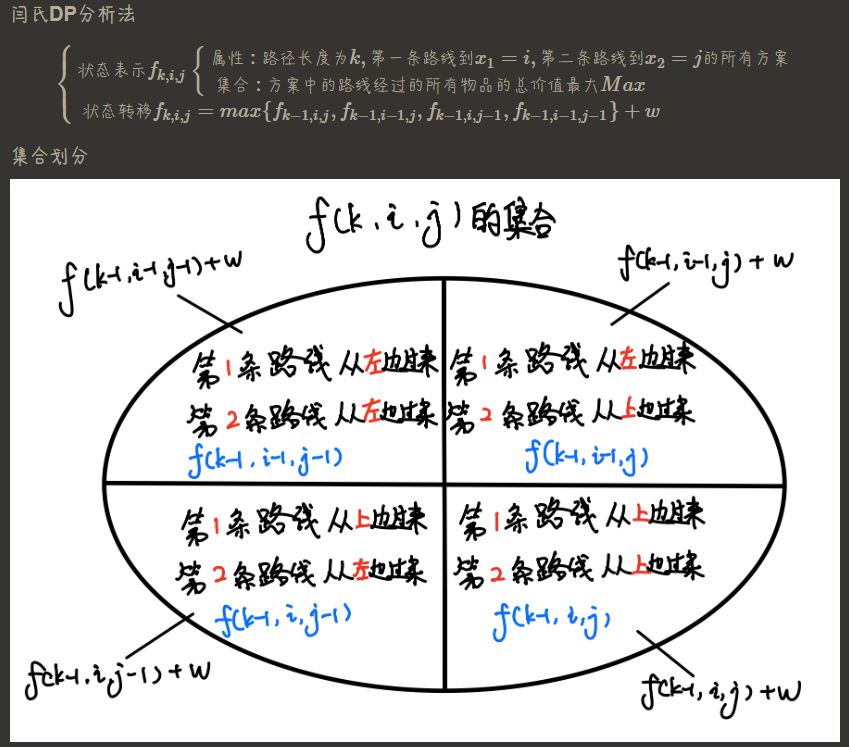
AcWing275
题目重述 这道题的核心是利用方格取数模型的思想,将两条路径的传递过程映射为同时出发的两条路径,避免重复格子的经过。题解通过以下步骤解题: 路径映射:从 (n, m) 回到 (1, 1) 的路径,可以转换成 (1, 1) 到 (n, m) …...

Windows系统部署redis自启动服务【亲测可用】
文章目录 引言I redis以本地服务运行(Windows service)使用MSI安装包配置文件,配置端口和密码II redis服务以终端命令启动缺点运行redis-server并指定端口和密码III 知识扩展确认redis-server可用性Installing the Service引言 服务器是Windows系统,所以使用Windows不是re…...

深入了解机器学习 (Descending into ML):线性回归
人们早就知晓,相比凉爽的天气,蟋蟀在较为炎热的天气里鸣叫更为频繁。数十年来,专业和业余昆虫学者已将每分钟的鸣叫声和温度方面的数据编入目录。Ruth 阿姨将她喜爱的蟋蟀数据库作为生日礼物送给您,并邀请您自己利用该数据库训练一…...

每日OJ题_牛客_集合_排序_C++_Java
目录 牛客_集合_排序 题目解析 C代码 Java代码 牛客_集合_排序 集合_牛客题霸_牛客网 (nowcoder.com) 题目解析 笔试题可直接用set排序,面试可询问是否要手写排序函数,如果要手写排序,推荐写快排。 C代码 #include <iostream> …...
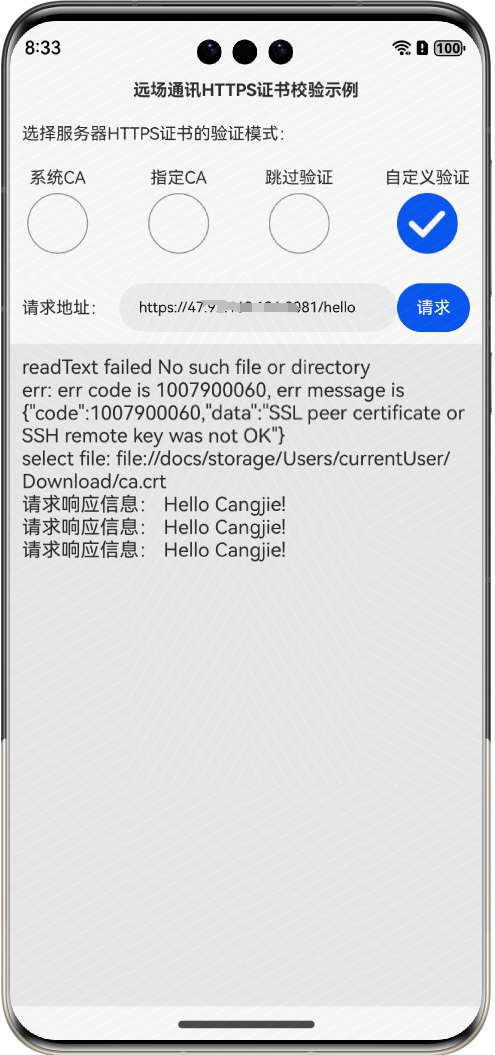
鸿蒙网络编程系列27-HTTPS服务端证书的四种校验方式示例
1. 服务端数字证书验证的问题 在鸿蒙客户端对服务端发起HTTPS请求时,如果使用HttpRequest的request发起请求,那么就存在服务端数字证书的验证问题,你只有两个选择,一个是使用系统的CA,一个是使用自己选定的CA…...

scala继承
Scala中继承的定义为在原有类的基础上定义一个新类,原有类称为父类,新类称为子类。 当子类从父类中继承的方法不能满足需要时,子类需要有自己的行为,怎么办? 此时使用override可以重写父类方法。 class Aniaml(){va…...

【Hive】2-Apache Hive概述、架构、组件、数据模型
Apache Hive概述 什么是Hive Apache Hive是一款建立在Hladoop之上的开源数据仓库系统,可以将存储在Hadoop文件中的结构化、半结构化数据文件映射为一张数据库表,基于表提供了一种类似SQL的查询模型,称为Hive查询语言(HQL),用于访…...

关于目前面试八股文的一些心得体会
现在是2024年10月,自22年开始,明显感觉到整个计算机行业,越来越卷了。一方面,随着信息的传播,越来越多的新人涌入了这个赛道,另一方面,众所周知的原因,不管大厂还是小厂在经历寒冬之…...

大数据-178 Elasticsearch Query - Java API 索引操作 文档操作
点一下关注吧!!!非常感谢!!持续更新!!! 目前已经更新到了: Hadoop(已更完)HDFS(已更完)MapReduce(已更完&am…...

PHP(一)从入门到放弃
参考文献:https://www.php.net/manual/zh/introduction.php PHP 是什么? PHP(“PHP: Hypertext Preprocessor”,超文本预处理器的字母缩写)是一种被广泛应用的开放源代码的多用途脚本语言,它可嵌入到 HTML…...

基于深度学习的生物启发的学习系统
基于深度学习的生物启发学习系统(Biologically Inspired Learning Systems)旨在借鉴生物大脑的结构和学习机制,设计出更高效、更灵活的人工智能系统。这类系统融合了生物神经科学的研究成果,通过模仿大脑中的学习模式、记忆过程和…...

10_实现readonly
在某些时候,我们希望定义一些数据是只读的,不允许被修改,从而实现对数据的保护,即为 readonly 只读本质上也是对数据对象的代理,我们同样可以基于之前实现的 createReactiveObject 函数来实现,可以为此函数…...

简单介绍$listeners
$listeners 它可以获取父组件传递过来的所有自定义函数,如下: // 父组件 <template><div class"a"><Child abab"handleAbab" acac"handleAcac"/></div> </template><script> impor…...

STM8 Bootloader实现与固件远程升级技术详解
1. 项目概述在嵌入式产品开发中,经常会遇到设备出厂后需要远程升级固件的需求。最近我在新能源行业的一个项目中就遇到了这种情况:已经封装好的设备出现软件Bug需要修复,但无法拆机使用传统烧录工具。这时候Bootloader技术就派上了大用场。Bo…...

iSDIO库:嵌入式系统中FlashAir Wi-Fi卡的SDIO协议栈
1. iSDIO库概述:面向TOSHIBA FlashAir的嵌入式SDIO协议栈iSDIO(intelligent SDIO)库是一个专为东芝(TOSHIBA)FlashAir系列Wi-Fi SD卡设计的轻量级嵌入式驱动与通信中间件。该库并非通用SDIO主机控制器驱动,…...

我用Hermes Agent的经历——对比OpenClaw
前言 昨天在中山出差,等客户的间隙掏出手机,在微信里存了点东西给Hermes Agent。 没有打开电脑,没有配置环境,就是随手往对话框里扔了几个问题。 然后Hermes Agent直接帮我把文档写好了。OpenClaw的体验 坦白说,OpenCl…...

PyTesseract实战:从参数调优到场景化OCR识别方案
1. PyTesseract入门:为什么参数调优如此重要? 第一次用PyTesseract做OCR识别时,我对着满屏乱码的输出结果差点崩溃——明明图片上的文字清晰可见,为什么识别结果却错得离谱?后来才发现,默认参数配置就像用菜…...
)
大厂P9:从P5到P9的关键跃迁 (原始ppt)
来源:基于最近一下线下分享,一并粘贴过来分享给大家。 https://mp.weixin.qq.com/s/C0WaiedJslkg1KZwtsNmkA...

柔性制造企业数字化工厂系统建设方案:制造业数字化全景图、打造5大引擎内核构建工业数字化底座、数据中台与数据治理、典型应用场景示例
本方案针对制造企业信息化痛点,提出基于无代码开发与组装式应用的数字化工厂建设思路,通过数据中台整合多源数据,结合MES、APS、WMS、数字孪生等系统,实现柔性生产、规范化管理与效率提升,助力企业低成本、高柔性、可持…...

本科生毕业论文必备:2026年这几款工具从开题到答辩全覆盖
基于2026年最新实测数据,从学术严谨性、降重效果、AIGC合规性等维度,为你筛选出综合实力最强的论文写作工具。 一、综合实力TOP 10榜单 排名工具名称核心定位综合评分价格一句话总结🥇1毕业之家全流程学术管家9.4/101.2元/千字起真实文献三级…...

2026年五款新手热门电钢琴横向评测~电钢琴深度对比与选择建议
不少钢琴学习者熬过初期的热情期后,都会陷入一个怪圈,就是在练琴时长明明在增加,可实际演奏的声音却机械又僵硬,完全没了灵动质感。从核心逻辑来看,电钢琴从来不是单纯的电子产品,而是高精度传感系统与声学…...

行业内GEO优化服务哪家可靠
行业内可靠的GEO优化服务之选在当今数字化时代,随着用户搜索习惯从传统搜索引擎向生成式AI平台转型,企业面临着传统SEO/社媒营销失效、品牌曝光锐减等问题。GEO(生成式引擎优化)优化服务成为企业抢占AI搜索流量高地的关键。那么&a…...

OpenClaw隐私保护方案:千问3.5-35B-A3B-FP8本地化数据处理实践
OpenClaw隐私保护方案:千问3.5-35B-A3B-FP8本地化数据处理实践 1. 为什么需要全链路隐私保护 去年我帮一位医生朋友整理病历资料时,突然意识到一个问题:当AI助手能读取患者检查报告、化验单甚至影像资料时,如何确保这些敏感信息…...