机器视觉相机自动对焦算法
第一,Brenner梯度法、
第二,Tenegrad梯度法、
第三,laplace梯度法、
第四,方差法、
第五,能量梯度法。
此实例通过使用Halcon实现5种清晰度算法函数:
1. 方差算法函数;
2. 拉普拉斯能量函数;
3. 能量梯度函数;
4. Brenner函数;
5. Tenegrad函数;
测试效果如下图片;找到峰值对应的那张图,确实是最清晰的那张;使用直方图显示清晰度结果,如果有更好的方法,那就跟帖回复吧。
此实例有HalconBBS群友提供!
*evaluate_definition的使用例子
*使用halcon自带的图片
*实现了五种评价函数,
*选择算子的Method值,可以观察不同评价函数的效果。
read_image (Image, 'pcb_focus/pcb_focus_telecentric_106')
dev_update_off ()
dev_close_window ()
dev_open_window_fit_image (Image, 0, 0, 752, 480, WindowHandle)
set_display_font (WindowHandle, 16, 'mono', 'true', 'false')
dev_set_color ('lime green')
dev_set_line_width (3)
Ret:=[]
get_image_size(Image, Width, Height)
for Index := 1 to 121 by 1
read_image (Image, 'pcb_focus/pcb_focus_telecentric_'+Index$'03d')
evaluate_definition (Image, 'Tenegrad', Value)
dev_display (Image)
Ret:=[Ret,Value]
endfor
*使用直方图显示清晰度结果,如果有更好的方法,那就跟帖回复吧
VMax:=max(Ret)
VMin:=min(Ret)
GRet := 100*(Ret-VMin)/(VMax-VMin)
gen_region_histo(Region, Ret, 255, 255, 1)
*找到峰值对应的那张图,确实是最清晰的那张。
qxd:=find(Ret, max(Ret))
read_image (GoodImage, 'pcb_focus/pcb_focus_telecentric_'+qxd$'03d')
dev_display (GoodImage)
dev_display (Region)
evaluate_definition函数代码如下:
scale_image_max(Image, Image)
get_image_size(Image, Width, Height)if(Method = 'Deviation')
*方差法region_to_mean (Image, Image, ImageMean) convert_image_type (ImageMean, ImageMean, 'real')convert_image_type (Image, Image, 'real') sub_image(Image, ImageMean, ImageSub, 1, 0)mult_image(ImageSub, ImageSub, ImageResult, 1, 0)intensity(ImageResult, ImageResult, Value, Deviation) elseif(Method = 'laplace')
*拉普拉斯能量函数laplace (Image, ImageLaplace4, 'signed', 3, 'n_4')laplace (Image, ImageLaplace8, 'signed', 3, 'n_8')add_image(ImageLaplace4,ImageLaplace4,ImageResult1, 1, 0)add_image(ImageLaplace4,ImageResult1,ImageResult1, 1, 0)add_image(ImageLaplace8,ImageResult1,ImageResult1, 1, 0)mult_image(ImageResult1, ImageResult1, ImageResult, 1, 0)intensity(ImageResult, ImageResult, Value, Deviation)elseif(Method = 'energy')
*能量梯度函数crop_part(Image, ImagePart00, 0, 0, Width-1, Height-1)crop_part(Image, ImagePart01, 0, 1, Width-1, Height-1)crop_part(Image, ImagePart10, 1, 0, Width-1, Height-1)convert_image_type (ImagePart00, ImagePart00, 'real')convert_image_type (ImagePart10, ImagePart10, 'real')convert_image_type (ImagePart01, ImagePart01, 'real')sub_image(ImagePart10, ImagePart00, ImageSub1, 1, 0)mult_image(ImageSub1, ImageSub1, ImageResult1, 1, 0)sub_image(ImagePart01, ImagePart00, ImageSub2, 1, 0)mult_image(ImageSub2, ImageSub2, ImageResult2, 1, 0)add_image(ImageResult1, ImageResult2, ImageResult, 1, 0) intensity(ImageResult, ImageResult, Value, Deviation)
elseif(Method = 'Brenner')
*Brenner函数法crop_part(Image, ImagePart00, 0, 0, Width, Height-2)convert_image_type (ImagePart00, ImagePart00, 'real')crop_part(Image, ImagePart20, 2, 0, Width, Height-2)convert_image_type (ImagePart20, ImagePart20, 'real')sub_image(ImagePart20, ImagePart00, ImageSub, 1, 0)mult_image(ImageSub, ImageSub, ImageResult, 1, 0)intensity(ImageResult, ImageResult, Value, Deviation)
elseif(Method = 'Tenegrad')
*Tenegrad函数法sobel_amp (Image, EdgeAmplitude, 'sum_sqrt', 3)min_max_gray(EdgeAmplitude, EdgeAmplitude, 0, Min, Max, Range)threshold(EdgeAmplitude, Region1, 11.8, 255)region_to_bin(Region1, BinImage, 1, 0, Width, Height)mult_image(EdgeAmplitude, BinImage, ImageResult4, 1, 0)mult_image(ImageResult4, ImageResult4, ImageResult, 1, 0)intensity(ImageResult, ImageResult, Value, Deviation)elseif(Method = '2')elseif(Method = '3')endifreturn ()scale_image_max(Image, Image)
get_image_size(Image, Width, Height)
if(Method = 'Deviation')
*方差法
region_to_mean (Image, Image, ImageMean)
convert_image_type (ImageMean, ImageMean, 'real')
convert_image_type (Image, Image, 'real')
sub_image(Image, ImageMean, ImageSub, 1, 0)
mult_image(ImageSub, ImageSub, ImageResult, 1, 0)
intensity(ImageResult, ImageResult, Value, Deviation)
elseif(Method = 'laplace')
*拉普拉斯能量函数
laplace (Image, ImageLaplace4, 'signed', 3, 'n_4')
laplace (Image, ImageLaplace8, 'signed', 3, 'n_8')
add_image(ImageLaplace4,ImageLaplace4,ImageResult1, 1, 0)
add_image(ImageLaplace4,ImageResult1,ImageResult1, 1, 0)
add_image(ImageLaplace8,ImageResult1,ImageResult1, 1, 0)
mult_image(ImageResult1, ImageResult1, ImageResult, 1, 0)
intensity(ImageResult, ImageResult, Value, Deviation)
elseif(Method = 'energy')
*能量梯度函数
crop_part(Image, ImagePart00, 0, 0, Width-1, Height-1)
crop_part(Image, ImagePart01, 0, 1, Width-1, Height-1)
crop_part(Image, ImagePart10, 1, 0, Width-1, Height-1)
convert_image_type (ImagePart00, ImagePart00, 'real')
convert_image_type (ImagePart10, ImagePart10, 'real')
convert_image_type (ImagePart01, ImagePart01, 'real')
sub_image(ImagePart10, ImagePart00, ImageSub1, 1, 0)
mult_image(ImageSub1, ImageSub1, ImageResult1, 1, 0)
sub_image(ImagePart01, ImagePart00, ImageSub2, 1, 0)
mult_image(ImageSub2, ImageSub2, ImageResult2, 1, 0)
add_image(ImageResult1, ImageResult2, ImageResult, 1, 0)
intensity(ImageResult, ImageResult, Value, Deviation)
elseif(Method = 'Brenner')
*Brenner函数法
crop_part(Image, ImagePart00, 0, 0, Width, Height-2)
convert_image_type (ImagePart00, ImagePart00, 'real')
crop_part(Image, ImagePart20, 2, 0, Width, Height-2)
convert_image_type (ImagePart20, ImagePart20, 'real')
sub_image(ImagePart20, ImagePart00, ImageSub, 1, 0)
mult_image(ImageSub, ImageSub, ImageResult, 1, 0)
intensity(ImageResult, ImageResult, Value, Deviation)
elseif(Method = 'Tenegrad')
*Tenegrad函数法
sobel_amp (Image, EdgeAmplitude, 'sum_sqrt', 3)
min_max_gray(EdgeAmplitude, EdgeAmplitude, 0, Min, Max, Range)
threshold(EdgeAmplitude, Region1, 11.8, 255)
region_to_bin(Region1, BinImage, 1, 0, Width, Height)
mult_image(EdgeAmplitude, BinImage, ImageResult4, 1, 0)
mult_image(ImageResult4, ImageResult4, ImageResult, 1, 0)
intensity(ImageResult, ImageResult, Value, Deviation)
elseif(Method = '2')
elseif(Method = '3')
endif
return ()
相关文章:

机器视觉相机自动对焦算法
第一,Brenner梯度法、 第二,Tenegrad梯度法、 第三,laplace梯度法、 第四,方差法、 第五,能量梯度法。 此实例通过使用Halcon实现5种清晰度算法函数: 1. 方差算法函数; 2. 拉普拉斯能量函数…...

StarTowerChain:开启去中心化创新篇章
官网: www.startower.fr 在当今创新驱动的时代,StarTowerChain 以其独特的去中心化创新模式,为我们带来了新的希望和机遇。去中心化,这个充满活力与创造力的理念,正引领着我们走向未来的创新之路。 StarTowerChain …...

SpringCloudStream使用StreamBridge实现延时队列
利用RabbitMQ实现消息的延迟队列 一、安装RabbitMQ 1、安装rabbitmq 安装可以看https://blog.csdn.net/qq_38618691/article/details/118223851,进行安装。 2、安装插件 安装完毕后,exchange是不支持延迟类型的,需要手动安装插件,需要和安装的rabbitmq版本一致 https:…...

MATLAB中head函数用法
目录 语法 说明 示例 显示矩阵的前八行 显示表的前三行 返回表的前八行 head函数的功能是获取数组或表的顶行。 语法 head(A) head(A,k) B head(___) 说明 head(A) 在命令行窗口中显示数组、表或时间表 A 的前八行,但不存储值。 head(A,k) 显示 A 的前 k …...

golang 基本数据类型
1. go语言的数据类型简介 golang的数据类型分为两大类,一类是基本数据类型和符合数据类型; 按照传递的内容分:传递本身数据和传递地址; golang和java很相似,都是值传递,不过分为传递的值和传递的地址&a…...

各种查询sql介绍
1. 关联查询(JOIN) 关联查询用于从多个表中检索数据。它基于两个或多个表之间的共同字段(通常是主键和外键)来组合数据。 内连接(INNER JOIN): sql SELECT a.name, b.order_date FROM custome…...

Guava防击穿回源-异步防击穿
异步防击穿策略 在高并发环境下,缓存击穿(Cache Stampede)是一种常见的问题。当缓存中的热点数据失效或未命中时,大量并发请求同时访问后端数据源(如数据库),可能导致后端系统压力骤增,甚至出现崩溃。为了有效防止这种情况,可以利用Guava提供的异步缓存加载机制(类似…...

人工智能正在扼杀云计算的可持续性
可持续性曾是公共云计算中备受推崇的优势。企业和云提供商大肆宣扬他们的绿色计划,推广采用可再生能源的数据中心,以减少碳足迹。 近几个月来,这个话题已悄然淡出人们的视线。罪魁祸首是什么?对人工智能功能的无限需求正在推动云…...

C# 条形码、二维码标签打印程序
1、条码标答打印主界面 2、打印设置 3、生成QR代码 private void GetBarcode_T(string lr) { QRCodeEncoder qrCodeEncoder = new QRCodeEncoder();//创建一个对象 qrCodeEncoder.QRCodeEncodeMode = QRCodeEncoder.ENCODE_MODE.BYTE; //设置编码测量…...

嵌入式入门学习——6Protues点亮数码管,认识位码和段码,分辨共阴还是共阳(数字时钟第一步)
0 系列文章入口 嵌入式入门学习——0快速入门,Let‘s Do It! 首先新建基于Arduino UNO的protues工程,见本系列第3篇文章 1 点“P”按钮找器件 2 输入“seg”或“digit”查找数码管器件 3 找到我们想要的6位7段数码管 4如图A、B…DP都是段码…...

poisson过程——随机模拟(Python和R实现)
Python实现 exponential()使用,自动poisson过程实现。 import numpy as np import matplotlib.pyplot as plt# Parameters lambda_rate 5 # rate parameter (events per time unit) T 10 # total time# Generate Poisson process times np.random.exponential(…...

100 种下划线 / 覆盖层动画 | 终极 CSS(层叠样式表)集合
还在为你的菜单项和链接寻找动画效果而感到疲惫吗? 不用再找了!这里列出了 100 多种不同的动画。从简单的到更复杂的,你肯定能找到自己想要的。 无需 SVG(可缩放矢量图形),无需 JavaScript(脚…...

华为ICT大赛2024-2025网络赛道考试分析
华为ICT大赛2024-2025正在报名中,网络赛道的同学如何备考,了解考试内容呢? 一、考试概况 华为ICT大赛分为4个赛段,分别为省赛初赛、省赛复赛、中国总决赛,全球总决赛。其中对应的能力级别分别如下: 省赛…...

linux 效率化 - 输入法 - fcitx5
安装 Fcitx5 1. 卸载 ibus 框架 由于 ibus 和 fcitx 可能会冲突,先卸载 ibus(暂未确认原因) sudo apt remove --purge ibus2. 安装 fcitx5 输入法框架 sudo apt update sudo apt install fcitx5 fcitx5-chinese-addons fcitx5-frontend-gtk…...
YOLOv11改进策略【卷积层】| 替换骨干网络 CVPR-2024 RepViT 轻量级的Vision Transformers架构
一、本文介绍 本文记录的是基于RepVit的YOLOv11轻量化改进方法研究。RepVit的网络结构借鉴ViT的设计理念,通过分离的token mixe和channel mixer减少推理时的计算和内存成本,同时减少扩展比率并增加宽度,降低延迟,并通过加倍通道来弥补参数大幅减少的问题,提高了准确性。本…...

一天认识一个硬件之路由器
今天来给大家分享一下路由器的知识,先来说一下什么是路由器,路由器是一种计算机网络设备,它的主要作用是在不同的网络之间转发数据包,实现数据的传输和共享,介绍完了什么是路由器,再来介绍一下路由器的定义…...

【scene_manager】与 MoveIt 机器人的规划场景进行交互
scene_manager Scene Manager包是由 Robotnik 创建的 ROS 包,旨在帮助构建和与 MoveIt 机器人的规划场景进行交互。 背景信息 MoveIt 规划场景 是一个用于存储机器人周围世界的表示(外部碰撞)以及机器人自身状态(内部碰撞和当…...

数据结构单向链表的插入和删除(一)
链表 一、链表结构: (物理存储结构上不连续,逻辑上连续;大小不固定)二、单链表:三、单项链表的代码实现:四、开发可用的链表:四、单链表的效率分析: 一、链表结构&#x…...
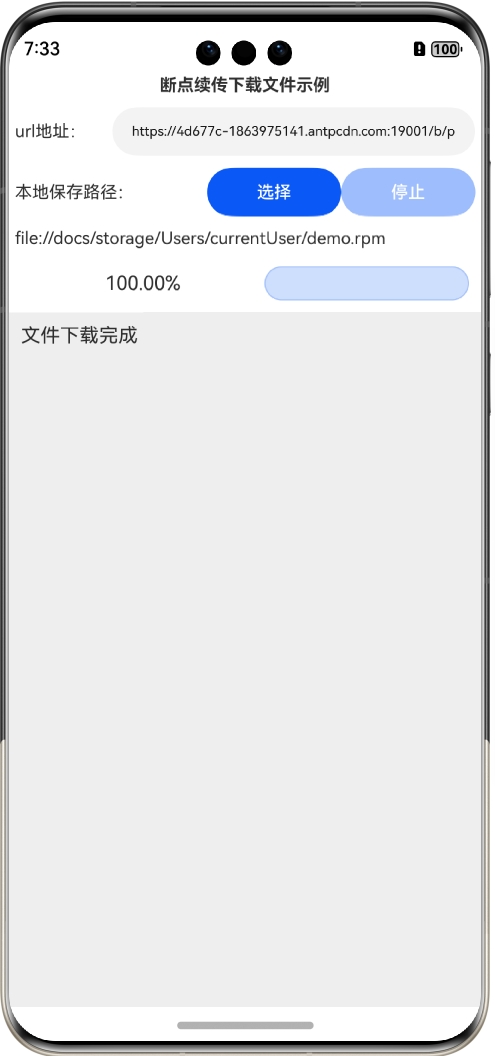
鸿蒙网络编程系列30-断点续传下载文件示例
1. 断点续传简介 在文件的下载中,特别是大文件的下载中,可能会出现各种原因导致的下载暂停情况,如果不做特殊处理,下次还需要从头开始下载,既浪费了时间,又浪费了流量。不过,HTTP协议通过Range…...
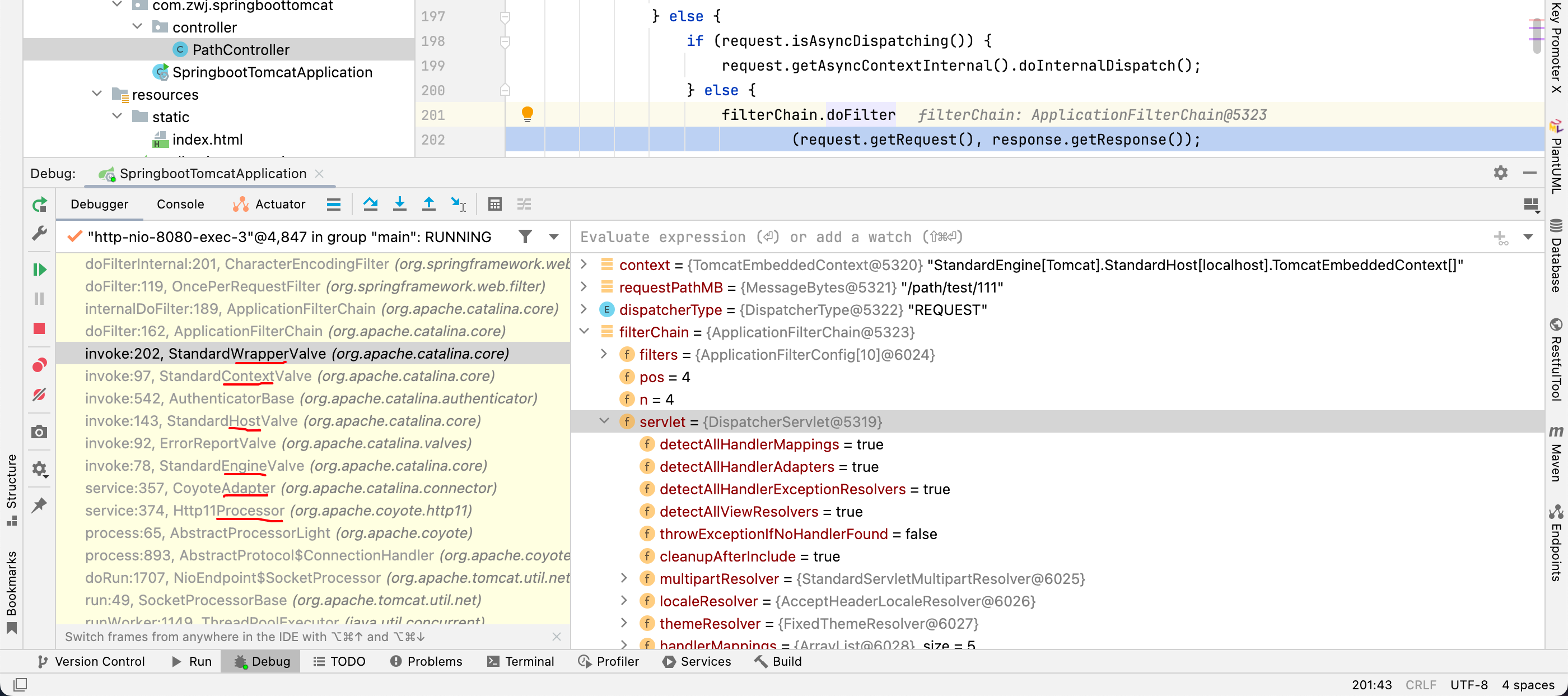
深入拆解TomcatJetty(二)
深入拆解Tomcat&Jetty(二) 专栏地址:https://time.geekbang.org/column/intro/100027701 1、Tomcat支持的IO模型和应用层协议 IO模型: NIO:非阻塞 I/O,采用 Java NIO 类库实现。NIO2:异…...

传感器与变送器:工业自动化的感知与信号处理核心
1. 传感器与变送器的核心差异解析在工业自动化领域,传感器和变送器就像人的感官神经与语言翻译系统。传感器如同触觉、视觉等感官末梢,直接感知外界物理量变化;而变送器则像专业的同声传译,将原始感知信息转化为标准化的表达方式。…...

SEO 排名优化软件如何进行竞争对手分析
SEO 排名优化软件如何进行竞争对手分析 在当今的数字营销环境中,SEO(搜索引擎优化)已经成为企业提升在线可见度和吸引潜在客户的关键手段。而SEO排名优化软件作为这一领域的重要工具,其核心功能之一便是竞争对手分析。通过深入了…...

Robin机器人感知系统与持续学习技术
“Robin 面对的是一个万物皆在变化的世界” 一套先进的感知系统能够检测并学习自身错误,使 Robin 机器人能够在生产规模下从杂乱的包裹堆中选取单个物品。 作者:Alan S. Brown 2022年4月18日 阅读时间:9分钟 相关内容 某机构的机器人手臂在安…...

罗技PUBG鼠标宏压枪技术全解析:从核心挑战到落地实践
罗技PUBG鼠标宏压枪技术全解析:从核心挑战到落地实践 【免费下载链接】logitech-pubg PUBG no recoil script for Logitech gaming mouse / 绝地求生 罗技 鼠标宏 项目地址: https://gitcode.com/gh_mirrors/lo/logitech-pubg 在PUBG等战术射击游戏中&#x…...

从YOLOv8到SpikeYOLO:在边缘设备上部署脉冲神经网络目标检测的完整实践指南
从YOLOv8到SpikeYOLO:边缘设备超低功耗目标检测实战手册 在无人机巡检、智能安防摄像头和可穿戴设备等边缘计算场景中,持续运行的目标检测系统常受限于电池容量与散热条件。传统卷积神经网络(CNN)如YOLOv8虽能实现实时检测&#x…...

QMK Toolbox:如何用这款开源工具轻松刷写机械键盘固件?
QMK Toolbox:如何用这款开源工具轻松刷写机械键盘固件? 【免费下载链接】qmk_toolbox A Toolbox companion for QMK Firmware 项目地址: https://gitcode.com/gh_mirrors/qm/qmk_toolbox QMK Toolbox 是一款专为机械键盘爱好者设计的开源固件刷写…...

RetDec反编译神器:从零开始掌握二进制代码逆向分析
RetDec反编译神器:从零开始掌握二进制代码逆向分析 【免费下载链接】retdec RetDec is a retargetable machine-code decompiler based on LLVM. 项目地址: https://gitcode.com/gh_mirrors/re/retdec 你是否曾经面对一个神秘的二进制文件,想要了…...

2026最权威的十大AI辅助写作助手解析与推荐
Ai论文网站排名(开题报告、文献综述、降aigc率、降重综合对比) TOP1. 千笔AI TOP2. aipasspaper TOP3. 清北论文 TOP4. 豆包 TOP5. kimi TOP6. deepseek 现今,人工智能辅助论文写作在学术研究里已渐渐变成常见的手段,当前&a…...

基于stm32的红外体温计设计[单片机]-计算机毕业设计源码+LW文档
摘要:本文详细阐述了一款基于STM32单片机的红外体温计设计过程。该设计综合运用红外测温技术、单片机控制技术以及OLED显示技术等,实现了对人体体温的快速、精准测量与直观显示。通过硬件电路设计与软件程序编写,完成了包括红外测温模块、单片…...

如何轻松管理空洞骑士模组?Lumafly跨平台模组管理器详解
如何轻松管理空洞骑士模组?Lumafly跨平台模组管理器详解 【免费下载链接】Lumafly A cross platform mod manager for Hollow Knight written in Avalonia. 项目地址: https://gitcode.com/gh_mirrors/lu/Lumafly 还在为空洞骑士模组安装的复杂流程而烦恼吗…...