动态规划探索篇
Leetcode63——不同路径Ⅱ
题目描述:
给定一个 m x n 的整数数组 grid。一个机器人初始位于 左上角(即 grid[0][0])。机器人尝试移动到 右下角(即 grid[m - 1][n - 1])。机器人每次只能向下或者向右移动一步。
网格中的障碍物和空位置分别用 1 和 0 来表示。机器人的移动路径中不能包含 任何 有障碍物的方格。
返回机器人能够到达右下角的不同路径数量。
测试用例保证答案小于等于 2 * 109。
示例 1:

输入:obstacleGrid = [[0,0,0],[0,1,0],[0,0,0]]
输出:2
解释:3x3 网格的正中间有一个障碍物。
从左上角到右下角一共有 2 条不同的路径:
1. 向右 -> 向右 -> 向下 -> 向下
2. 向下 -> 向下 -> 向右 -> 向右
算法思想:
利用动态规划的思想,通过bp[][]二位数组记录每到位置(m,n)时有多少种走法。
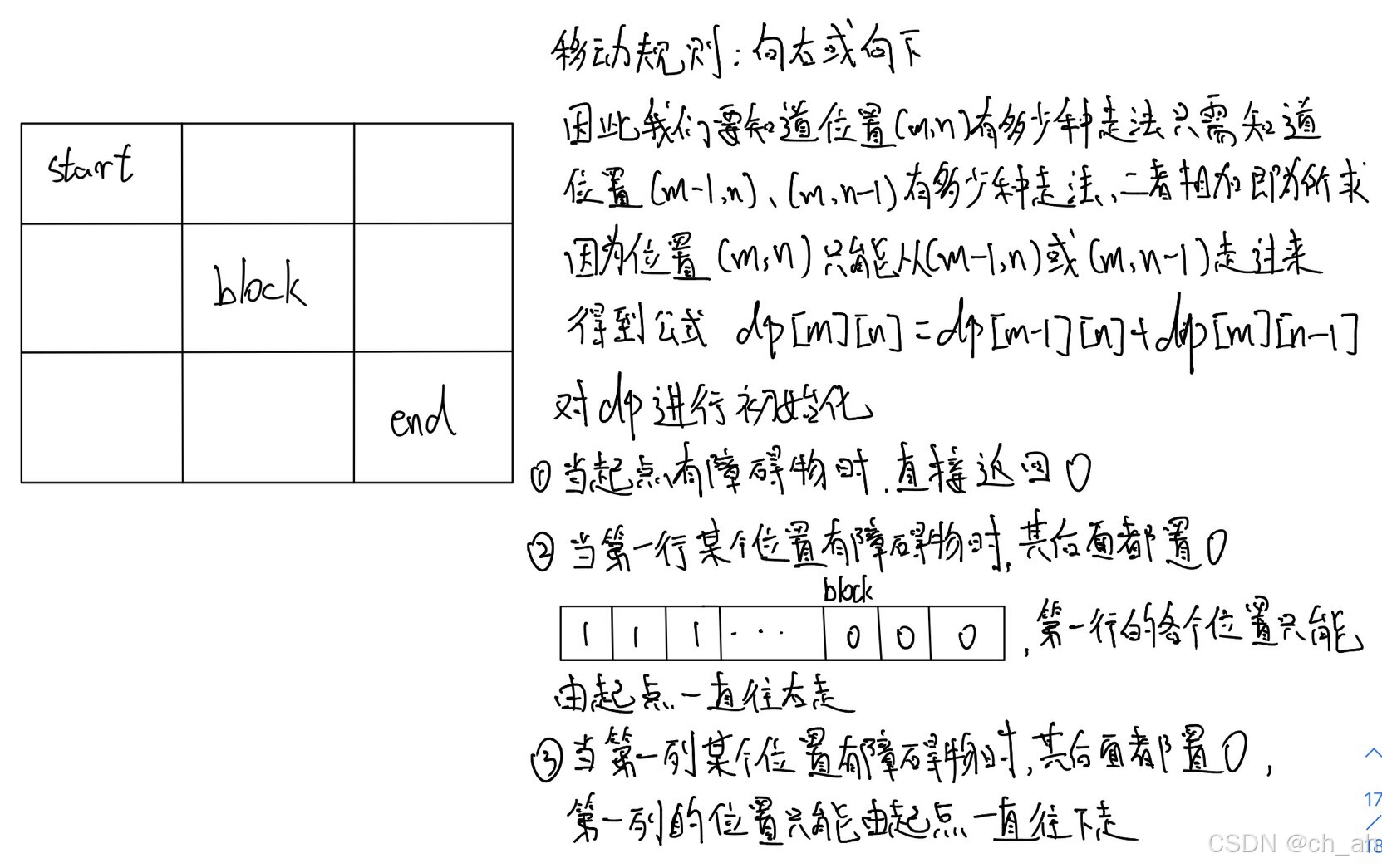
算法实现:
int uniquePathsWithObstacles(vector<vector<int>>& obstacleGrid) {//起点有障碍直接返回0if (obstacleGrid[0][0] == 1)return 0;/*bp[m][n]表示到位置m,n有多少种不同的路径*/vector<vector<int>> bp(obstacleGrid.size(),vector<int>(obstacleGrid[0].size(), 1));//bp数组第一行的初始化for (int i = 0; i < obstacleGrid[0].size(); i++) {if (obstacleGrid[0][i] == 1) {while (i < obstacleGrid[0].size()) {bp[0][i++] = 0;}}}//bp数组的第一列初始化for (int i = 0; i < obstacleGrid.size(); i++) {if (obstacleGrid[i][0] == 1) {while (i < obstacleGrid.size()) {bp[i++][0] = 0;}}}//bp数组的计算for (int i = 1; i < obstacleGrid.size(); i++) {for (int j = 1; j < obstacleGrid[0].size(); j++) {if (obstacleGrid[i][j] == 1)bp[i][j] = 0;elsebp[i][j] = bp[i - 1][j] + bp[i][j - 1];}}//终点位置及所求返回return bp[obstacleGrid.size() - 1][obstacleGrid[0].size() - 1];}相关文章:
动态规划探索篇
Leetcode63——不同路径Ⅱ 题目描述: 给定一个 m x n 的整数数组 grid。一个机器人初始位于 左上角(即 grid[0][0])。机器人尝试移动到 右下角(即 grid[m - 1][n - 1])。机器人每次只能向下或者向右移动一步。 网格…...

js中多let与var
在 JavaScript 中,let 和 var 都用于声明变量,但它们有一些关键的区别。主要区别包括作用域、变量提升、可重复声明、以及在全局作用域中的行为。 1. 作用域(Scope) let:块级作用域。用 let 声明的变量只在其所在的代…...

基于人工智能的搜索和推荐系统
互联网上的搜索历史分析和用户活动是个性化推荐的基础,这些推荐已成为电子商务行业和在线业务的强大营销工具。随着人工智能的使用,在线搜索也在改进,因为它会根据用户的视觉偏好提出建议,而不是根据每个客户的需求和偏好量身定制…...

冷钱包与热钱包的差异 | 加密货币存储的安全方案
随着加密货币的普及,越来越多的人开始重视加密资产的安全存储问题。钱包作为存储数字资产的工具,主要分为冷钱包和热钱包两大类。它们在安全性、便捷性以及适用场景方面各有优劣。了解这两者的差异,有助于投资者根据自己的需求选择合适的钱包…...

014:无人机遥控器操作
摘要:本文详细介绍了无人机遥控器及其相关操作。首先,解释了油门、升降舵、方向舵和副翼的概念、功能及操作方式,这些是控制无人机飞行姿态的关键部件。其次,介绍了美国手、日本手和中国手三种不同的操作模式,阐述了遥…...

PCL 点云高度归一化
目录 一、概述二、代码示例三、结果一、概述 点云高度归一化:为了消除地形起伏对点云数据高程值的影响,特别是在地物间存在显著高程差异的情况下,必须对点云数据进行归一化处理。这一步骤对于许多算法至关重要,因为它能够显著提升后续点云处理或分割任务的准确性。 归一化处…...

【Effective C++】阅读笔记4
1. 确保公有继承中有is-a的关系 Is-a关系理解 该关系就是派生类应该具备基类的所有特性,并且可以替代基类对象使用,例如猫和狗都是动物的派生类,因为猫和狗都和动物形成了is-a关系,猫和狗都是动物。 在该关系下,派生类…...

浅谈mysql【8.0】链接字符串
string connectionString "serveryour_server;useryour_user;passwordyour_password;databaseyour_database;sslmodenone;allowPublicKeyRetrievaltrue;Allow User VariablesTrue;";在 C# 中配置 MySQL 数据库连接字符串时,可以通过添加多个参数来控制连…...

BERT,RoBERTa,Ernie的理解
BERT: 全称:Bidirectional Encoder Representations from Transformers。可以理解为 “基于 Transformer 的双向编码器表示”。含义:是一种用于语言表征的预训练模型。它改变了以往传统单向语言模型预训练的方式,能够联合左侧和右…...

获取 Wind 数据并进行简单的择时分析
使用Python获取Wind数据并进行简单的择时分析时,需要按照以下步骤操作。 (1)登录Wind官网,在“金融解决方案”的下拉列表里选择“金融终端”选项,如下图3.2所示。 (2)根据自己计算机的实际情况…...

小檗碱的酵母代谢工程生物合成-文献精读78
De novo production of protoberberine and benzophenanthridine alkaloids through metabolic engineering of yeast 将酵母代谢工程应用于原小檗碱和苯并啡啶类生物碱的从头合成 苄基异喹啉类生物碱的微生物合成-文献精读77 香叶醇酵母生产机器学习优化酵母-文献精读66 黄…...

文件指针和写入操作
文件指针位置 w 模式: 打开文件时,文件指针位于文件的开头。如果文件已存在,文件内容会被清空。写入的数据会从文件开头开始覆盖原有内容。 a 模式: 打开文件时,文件指针位于文件的末尾。如果文件已存在,文…...

跨越科技与文化的桥梁——ROSCon China 2024 即将盛大开幕
在全球机器人技术飞速发展的浪潮中,ROS(Robot Operating System)作为一款开源的机器人操作系统,已成为无数开发者、研究人员和企业的首选工具。为了进一步推动ROS的应用与发展,全球知名的机器人操作系统会议——ROSCon…...

springboot+shiro 权限管理
一、为什么要了解权限框架 权限管理框架属于系统安全的范畴,权限管理实现对用户访问系统的控制,按照安全规则用户可以访问而且只能访问自己被授权的资源。 目前常见的权限框架有Shiro和Spring Security,本篇文章记录springboot整合sh…...

PureMVC在Unity中的使用(含下载链接)
前言 Pure MVC是在基于模型、视图和控制器MVC模式建立的一个轻量级的应用框架,这种开源框架是免费的,它最初是执行的ActionScript 3语言使用的Adobe Flex、Flash和AIR,已经移植到几乎所有主要的发展平台,支持两个版本框架…...

25国考照片处理器使用流程图解❗
1、打开“国家公务员局”网站,进入2025公务员专题,找到考生考务入口 2、点击下载地址 3、这几个下载链接都可以 4、下载压缩包 5、解压后先看“使用说明”,再找到“照片处理工具”双击。 6、双击后会进入这样的界面,点击&…...

一位纯理科生,跨界自学中医,自行组方治好胃病、颈椎病与高血脂症,并在最权威的中国中医药出版社出版壹本专业中医图书!
这是一位铁杆中医迷, 也是《神农本草经——精注易读本》的作者。 希望更多的人能够受到启发,感受中医之神奇,敢于跨界,爱好中医,学习中医! 一个病人以自己的切身感受与诊断,并使之汤药治愈疾病&…...
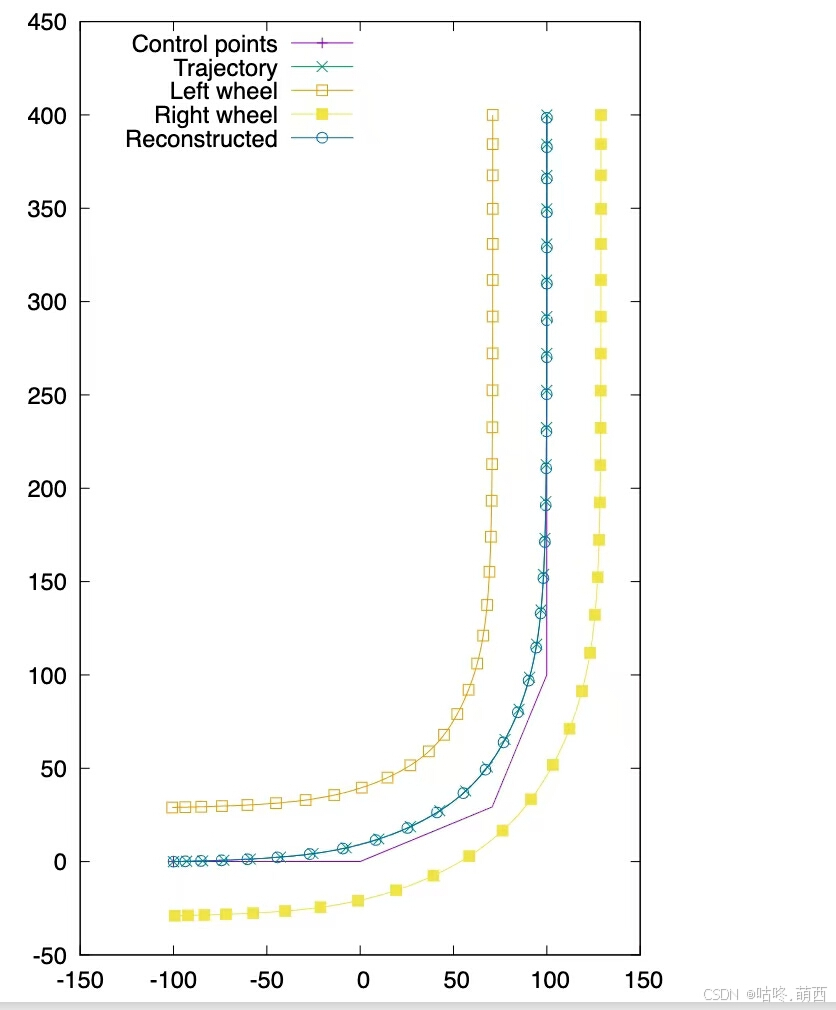
运动控制 双轮差速模型轨迹规划
文章目录 一、轨迹规划1.1轨迹平滑与轮迹1.2 目标距离1.3 速度限制1.4 候选速度的计算与调整1.5 路径生成 二、双轮轨迹2.1 计算梯度2.2 计算偏移轨迹2.3 返回结果 一、轨迹规划 1.1轨迹平滑与轮迹 初始时,我们有一条由若干坐标点构成的机器人运行路径。通过对这些…...

使用 Sortable.js 库 实现 Vue3 elementPlus 的 el-table 拖拽排序
文章目录 实现效果Sortable.js介绍下载依赖添加类名导入sortablejs初始化拖拽实例拖拽完成后的处理总结 在开发过程中,我们经常需要处理表格数据,并为用户提供便捷的排序方式。特别是在需要管理长列表、分类数据或动态内容时,拖拽排序功能显得…...
)
MySQL索引相关介绍及优化(未完...)
如何看一条SQL语句的执行好坏? MySQL提供了自带的工具Explain可以查看sql语句的执行好坏。 explain主要的列: 1:type:这一列表示MySQL决定如何查找表中的行,查找数据行记录的大概范围。 有 system const eq_ref ref…...

基于ESP32与MQTT的家庭环境监测系统:从传感器选型到数据可视化实战
1. 项目概述与核心价值最近几年,我身边越来越多的朋友开始关注家里的空气质量、温湿度这些看不见摸不着,但又实实在在影响生活舒适度和健康的环境指标。从新装修的房子担心甲醛,到有老人小孩的家庭在意PM2.5和二氧化碳浓度,再到南…...

别再死记公式了!用Python手写一个卷积层,彻底搞懂CNN里的‘卷’是怎么算的
用Python手写卷积层:从零理解CNN的"卷"运算 当你第一次看到卷积神经网络(CNN)的数学公式时,那些复杂的符号和下标是否让你望而却步?作为计算机视觉领域的基石,CNN的核心在于理解卷积运算的本质。本文将带你用NumPy从零实…...

MySQL 分区表实战:大表治理的利器与陷阱
开场白 分区表这个东西,我之前一直觉得就是个语法糖,直到有一次运维一张 2 亿行的日志表,查询慢到飞起,索引也建不动了,才认真研究分区表。结果发现分区表确实好用,但坑也不少——分区键选错了、分区裁剪没…...

如何快速获取Steam游戏清单:Onekey工具的终极使用指南
如何快速获取Steam游戏清单:Onekey工具的终极使用指南 【免费下载链接】Onekey Onekey Steam Depot Manifest Downloader 项目地址: https://gitcode.com/gh_mirrors/one/Onekey 还在为Steam游戏清单的繁琐获取过程而烦恼吗?Onekey作为一款完全免…...

【开源】前端拖拽表单设计器 自定义表单
【开源】开源 VUE拖拽表单设计器 自定义表单 开源 tduck-platform: Tduck-填鸭收集器是一款开源的表单在线收集系统,后台基于SpringBootMybatisPlusMySqlRedis,前端基于Vue ElementUI开发,功能强大,界面美观。keywords࿱…...

LizzieYzy:围棋AI分析工具的5大核心功能与实战指南
LizzieYzy:围棋AI分析工具的5大核心功能与实战指南 【免费下载链接】lizzieyzy LizzieYzy - GUI for Game of Go 项目地址: https://gitcode.com/gh_mirrors/li/lizzieyzy LizzieYzy是一款基于Lizzie改进的围棋AI分析图形界面工具,支持Katago、Le…...

从红宝石到光纤:固体激光器家族里,谁才是工业加工界的‘六边形战士’?
从红宝石到光纤:固体激光器家族里,谁才是工业加工界的‘六边形战士’? 在金属切割车间里,激光束正以毫米级精度划过不锈钢板;精密电子产线上,纳米级激光打标机为电路板刻印追溯码;汽车焊接工段…...

RL-ARM CAN迁移至CMSIS-RTOS的实践指南
1. 从RL-ARM CAN到CMSIS-RTOS的迁移背景在嵌入式开发领域,随着Keil MDK版本的迭代,RL-ARM库中的CAN组件逐渐向MDK Middleware过渡。许多基于MDK v4和早期v5版本开发的项目,都使用了RL-ARM库中的CAN驱动实现。当开发者需要将项目升级到较新的M…...
)
从下载到网页管理:TrueNAS SCALE最新版保姆级安装图文教程(VMware Workstation 17环境)
TrueNAS SCALE在VMware Workstation 17中的全流程部署指南 对于需要在本地环境中快速搭建网络存储测试平台的用户来说,TrueNAS SCALE无疑是一个理想选择。作为TrueNAS家族的最新成员,它不仅继承了传统存储管理系统的稳定性和可靠性,还引入了…...

Apache Fesod:Java开发者处理海量Excel数据的终极解决方案
Apache Fesod:Java开发者处理海量Excel数据的终极解决方案 【免费下载链接】fesod Fast. Easy. Done. Processing spreadsheets without worrying about large files causing OOM. 项目地址: https://gitcode.com/gh_mirrors/fast/fesod 在处理海量Excel数据…...