AVLTree
1.AVL树的概念
二叉搜索树虽然可以提高查找的效率,但是如果数据有序或者接近有序,二叉搜索树将退化为单支树,查找元素相当于在顺序表中搜索元素,效率低下。为了解决该问题,于是就有了AVLTree。即当向二叉搜索树中插入新节点后,如果能保证每个节点的左右子树高度差的绝对值不超过1(需要对数中的节点进行调整),即可降低树的高度,从而减少平均搜索长度。
AVL树可以是空树,也可以是具有以下性质的二叉搜索树:
1)它的左右子树都是AVL树;
2)左右子树高度差(简称平衡因子=右子树高度-左子树高度)的绝对值不超过1(-1/0/1)。

如果一棵二叉搜索树是高度平衡的,该树就是AVL树。如果该树有N个节点,其高度可保持在O(logN),搜索时间复杂度O(logN)。
2.实现AVL树
2.1 AVL树节点的定义
由于要实现AVL树的增删查改,所以要定义AVL树的节点,就需要定义parent,否则插入节点时,不知道要链接到树中哪个节点下面。
template<class K,class V>
struct AVLTreeNode
{AVLTreeNode<K, V>* _left;//指向左子树AVLTreeNode<K, V>* _right;//指向右子树AVLTreeNode<K, V>* _parent;//指向父亲节点pair<K, V> _kv;//用pair存储一对值int _bf;//平衡因子AVLTreeNode(const pair<K,V>& kv):_left(nullptr),_right(nullptr),_parent(nullptr),_kv(kv),_bf(0){}
};2.2 AVL树插入节点
AVL树就是在二叉搜索树的基础张引入了平衡因子,因此AVL树也可以看成是二叉搜索树。那么AVL树的插入过程可以分为两步:1.按照二叉搜索树的方式插入新节点;2.调整节点的平衡因子。
2.2.1 按二叉搜索树的方式插入新节点
插入新节点需要先判断树是否为空:(1)若为空,让该节点作为根节点;(2)若不为空,分为3种情况:①要插入节点的key值比当前节点的key值小,向左走;②要插入节点的key值比当前节点的key值大,向右走。③要插入节点的key值与当前节点的key值相等,插入失败。
template<class K,class V>
class AVLTree
{typedef AVLTreeNode<K,V> Node;
public://往AVLTree中插入节点,插入成功返回true,插入失败返回falsebool Insert(const pair<K, V>& kv){//1、先按照二叉搜索树的规则插入节点//如果二叉搜索树为空,则将新插入的节点作为根节点if (_root == nullptr){_root = new Node(kv);return true;}Node* parent = nullptr;Node* cur = _root;while (cur){if (cur->_kv.first > kv.first){parent = cur;cur = cur->_right;}else if (cur->_kv.first <= kv.first){parent = cur;cur = cur->_left;}else{return false;}}cur = new Node(kv);if (kv.first > parent->_kv.first)parent->_right = cur;elseparent->_left = cur;//反向链接父节点cur->_parent = parent;//2、更新平衡因子}private:Node* _root = nullptr;
};2.2.2 调整节点的平衡因子
更新前:
在插入新节点之前,parent的平衡因子分为三种情况:-1、0、1。新节点插入后,AVL树的平衡性可能会遭到破坏。一个节点的平衡因子是否需要更新,取决于它的左右子树的高度是否发生变化。如果插入节点后,它的父节点到根节点路径上的部分节点的平衡因子发生改变,那么需要对这些节点进行更新,以保持树的平衡。
①如果新增节点插入到父亲节点的左侧(cur==parent->left),那么父亲节点的平衡因子-1,parent->_bf--;
②如果新增节点插入到父亲节点的右侧(cur==parent->right),那么父亲节点的平衡因子+1,parent->_bf++;
更新后:
此时parent的平衡因子可能有三种情况:0、正负1、正负2。
①如果parent的平衡因子为0,说明插入新节点之前parent平衡因子为正负1,插入新节点后被调整为0,此时满足AVL树的性质,插入成功;
②如果parent的平衡因子为正负1,说明插入新节点前parent的平衡因子一定为0,插入新节点后被更新为正负1,此时以parent为根的树高度增加,需要继续向上更新;
③如果parent的平衡因子为正负2,则parent的平衡因子违反平衡树的性质,需要对其进行旋转处理。
//2、更新平衡因子
while (parent)
{//1、首先计算插入节点后,父亲节点的平衡因子if (cur == parent->_right){parent->_bf++;}else{parent->_bf--;}//2、根据更新后的parent节点的平衡因子,//进一步判断parent是否需要进行进一步的更新调整if (parent->_bf == 0){//parent->_bf==0,说明以parent为根节点的子树高度不变,更新结束。break;}else if (parent->_bf == 1 || parent->_bf == -1){//说明以parent为根节点的子树高度变高了,继续往上更新cur = parent;parent = parent->_parent;}else if (parent->_bf == 2 || parent->_bf == -2){//此时,以parent为根节点的子树出现不平衡了,需要进行旋转处理。//1、旋转的前提是保持它依旧是搜索二叉树;//2、旋转成平衡树if (parent->_bf == 2){if (cur->_bf == 1){//新节点插入较高右子树的右侧,需要进行左单旋RotateL(parent);//左单旋}else if (cur->_bf == -1){//新节点插入较高右子树的左侧,先右单旋、再左单旋RotateRL(parent);}}else if (parent->_bf == -2){if (cur->_bf == -1){//新节点插入较高左子树的左侧,需要进行右单旋RotateR(parent);}else if (cur->_bf == 1){//新节点插入较高左子树的右侧,先左单旋、再右单旋RotateLR(parent);}}//旋转完成后,子树的高度恢复到了插入节点前的高度//如果是子树,对上一层没有影响,更新结束。break;}
}2.2.3 旋转调整
如果在一棵原本是平衡的AVL树中插入一个新节点,可能造成不平衡,此时必须调整树的结构,使之恢复平衡。根据节点插入位置的不同,AVL树的旋转分为4种。①左单旋、②右单旋、③左右旋转、④右左旋转。
2.2.3.1 新节点插入较高右子树的右侧--左单旋
插入新节点前,AVL树是平衡的,新节点插入到以60为根节点的右子树,那么以60为根节点的右子树增加了一层,导致以30为根节点的二叉树不平衡。为了让以30为根节点的二叉树平衡,让30的右子树高度减小1,并把60的左子树的高度增加1。因此,要把60的右子树往上提,把30转下来,因为30比60小,所以30只能放在60的左子树上。而60的左子树节点的值比60小、比30大,因此只能将60的左子树放在30的右子树上。如下图所示:

此外,在写左旋转的代码时还应考虑到以下两种情况:
①节点subR的左孩子节点可能存在、也可能不存在;
②parent节点可能时根节点,也可能时子树;如果是根节点,左旋转操作只会,需要跟新根节点。如果是子树,可能是左子树也可能是右子树,此时需要将parent节点的父亲节点的左或右指向subR节点,subR节点的_parent指针指向parent节点的父亲节点。
//(1)左单旋
void RotateL(Node* parent)
{Node* subR = parent->_right;Node* subRL = subR->_left;parent->_right = subRL;if (subRL)subRL->_parent = parent;subR->_left = parent;Node* ppNode = parent->_parent;parent->_parent = subR;//1、如果原来parent是这棵树的根节点,左旋转完成后subR节点变成这棵树的根节点if (ppNode == nullptr){_root = subR;subR->_parent == nullptr;}else{if (ppNode->_left == parent)ppNode->_left = subR;elseppNode->_right = subR;subR->_parent = ppNode;}//左旋转完成之后,调整节点parent和subR的平衡因子parent->_bf = subR->_bf = 0;
}2.2.3.2 新节点插入较高左子树的左侧--右单旋
插入节点前,AVL树是平衡的,新节点插入到节点30的左子树上,那么节点30的左子树增加了一层,导致以节点60为根节点的二叉树不平衡。为了让以60为根节点的二叉树恢复平衡,让30的左子树高度减少一层,并把60的右子树的高度增加一层。因此,需要将节点30的左子树往上提,同时将节点60转下来。因为节点60比节点30大,因此只能将节点60放在节点30的右子树上。而节点30的右子树的值比30大、比60小,因此只能将节点30的右子树放在节点60的左子树上,最后更新平衡因子。如下图所示:

//(2)右单旋
void RotateR(Node* parent)
{Node* subL = parent->_left;Node* subLR = subL->_right;parent->_left = subLR;if (subLR)subLR->_parent = parent;subL->_right = parent;Node* ppNode = parent->_parent;parent->_parent = subL;if (parent == _root){_root = subL;subL->_parent = nullptr;}else{if (ppNode->_left == parent)ppNode->_left = subL;elseppNode->_right = subL;subL->_parent = ppNode;}subL->_bf = parent->_bf = 0;
}2.2.3.3 新节点插入较高左子树的右侧--先左单旋再右单旋
插入新节点前,AVL树是平衡的,新节点插入到以60为根节点的左子树上。那么以60为根节点的左子树增加了一层,导致以90为根节点的左子树高度+1。为了让以90为根节点的二叉树恢复平衡,只能让以90为根节点的左子树的高度减小一层。此时分为两步:①先把以30为根的二叉树左单旋;②再把以60为根节点的二叉树右单旋。

//(3)左-右双旋
void RotateLR(Node* parent)
{Node* subL = parent->_left;Node* subLR = subL->_right;int bf = subLR->_bf;RotateL(parent->_left);RotateR(parent);if (bf == 1){parent->_bf = 0;subL->_bf = -1;subLR->_bf = 0;}else if (bf == -1){parent->_bf = 1;subL->_bf = 0;subLR->_bf = 0;}else if (bf == 0){parent->_bf = 0;subL->_bf = 0;subLR->_bf = 0;}
}2.2.3.4 新节点插入较高右子树的左侧--先右单旋再左单旋
插入新节点前,AVL树是平衡的,新节点插入到以60为根节点的二叉树的右子树上,那么以60为根节点的右子树增加了一层,导致以30为根节点的二叉树不平衡。为了让以30为根节点的二叉树平衡,只能让以30为根节点的右子树的高度减小一层。此时,需要旋转两次:①先把90右单旋;②再把30左旋转。

//(4)右-左双旋
void RotateRL(Node*parent)
{Node* subR = parent->_right;Node* subRL = subR->_left;int bf = subRL->_bf;RotateR(parent->_right);RotateL(parent);if (bf == 1){parent->_bf = -1;subR->_bf = 0;subRL->_bf = 0;}else if (bf == -1){parent->_bf = 0;subR->_bf = 1;subRL->_bf = 0;}else if (bf == 0){parent->_bf = 0;subR->_bf = 0;subRL->_bf = 0;}
}3.AVL树的高度
计算树的高度肯定要借助递归计算:①计算左右子树的高度;②谁的高度大,那么AVL树的高度就为较高子树的高度+1。
//2、AVLTree的高度
int _Height(Node* root)
{if (root == nullptr)return 0;int leftHeight = _Height(root->_left);int rightHeight = _Height(root->_right);return leftHeight > rightHeight ? leftHeight + 1 : rightHeight + 1;
}int Height()
{return _Height(_root);
}4.判断二叉树是否为AVL树
如何检查AVL树是否合法?答案是通过平衡因子检查,平衡因子反映的是左右子树的高度差,计算出左右子树的高度只差,并与当前节点的平衡因子进行比较,如果发现不同,则说明AVL树非法。或者如果当前节点的平衡因子取值范围不再[-1,1]内,也可以判断为非法。①获取左右子树的高度;②根据左右子树的高度计算平衡因子;③当平衡因子<=2 || -2是就是平衡的。
//3、判断是否是AVL树
bool _IsBalance(Node* root)
{if (root == nullptr)return true;int leftHeight = _Height(root->_left);int rightHeight = _Height(root->_right);return abs(leftHeight - rightHeight) < 2&& _IsBalance(root->_left)&& _IsBalance(root->_right);
}bool IsBalance()
{return _IsBalance(_root);
}4.AVL树的性能
AVL树是一棵绝对平衡的二叉搜索树,其要求每个节点的左右子树高度差的绝对值都不超过1,这样可以保证查询时高效的时间复杂度,即O(logN)。但是如果要对AVL树做一些结构修改的操作,性能非常低下,比如:插入时要维护其绝对平衡,旋转的次数比较多,更差的是在删除时,有可能一直要让旋转持续到根的位置。因此:如果需要一种查询高效且有序的数据结构,而且数据的个数为静态的(即不会改变)。可以考虑AVL树,但是一个结构经常修改,就不太适合。
AVL树实现的完整代码可参考:AVL树的实现。
相关文章:
AVLTree
1.AVL树的概念 二叉搜索树虽然可以提高查找的效率,但是如果数据有序或者接近有序,二叉搜索树将退化为单支树,查找元素相当于在顺序表中搜索元素,效率低下。为了解决该问题,于是就有了AVLTree。即当向二叉搜索树中插入…...

Java面向对象 C语言字符串常量
1. (1). package liujiawei;public class Phone {String brand;double price;public void call(){System.out.println("手机打电话");}public void play(){System.out.println("手机打游戏");} } public class phonetest {public…...

SpringBoot+Thymeleaf电商系统
> 这是一个基于SpringBootThymeleafBootstrap实现的简单电商系统。 > 实现了用户浏览、添加购物车、商品管理等功能,并支持响应式布局。 > 本项目适合JAVA初学者作为入门学习项目 一、部分界面演示 二、技术栈 技术栈中文描述Spring Boot快速开发框架…...

了解数据库并发产生的问题
在数据库管理系统中,并发控制是一个至关重要的方面。随着多个用户或进程同时访问和修改数据库中的数据,如果没有适当的并发控制机制,就可能导致数据不一致、丢失更新、脏读、不可重复读和幻读等问题。在单用户系统中,数据库操作是…...

openstack之guardian介绍与实例创建过程
运行特征 采集模块:扩展Ceilometer,采集存储网、业务网连通性、nova目录是否可读写; 收集模块:将采集到的数据存储到数据库中; 分析模块:根据采集的结果,分析各节点状态,并进行反向检…...

新一代跟踪器StrongSORT: Make DeepSORT Great Again论文解析—让 DeepSORT 再次伟大
新一代跟踪器StrongSORT: Make DeepSORT Great Again论文解析—让 DeepSORT 再次伟大 时间:2023年 机构:北京邮电大学 发表在:IEEE TRANSACTIONS ON MULTIMEDIA, VOL. 25, 2023 代码源码地址: pytorch版本:https://github.com/dyh…...

SAP ABAP开发学习——RFC
目录 RFC接口 定义 调用过程 RFC的通信 RFC通信情况 RFC接口系统 RFC的通信模式 RFC版本 RFC调用方式 Web Service接口 SAP创建Web Service示例 远程目标的维护 创建远程目标 外部系统访问设置 RFC的调用 RFC接口 定义 调用过程 RFC的通信 RFC通信情况 RFC接…...
)
Elasticsearch里的索引index是什么概念?(ChatGPT回答)
在 Elasticsearch(ES)中,索引(Index) 是一种数据结构,用来存储、组织和管理文档数据。它可以理解为数据库中的一张表,但有一些关键的不同之处。索引是 Elasticsearch 全文搜索引擎的核心概念之一…...

安全性测试
安全性测试评估系统在面对各种安全威胁时的防护能力和安全性的过程。以下是安全性测试的一些主要方面和方法: 1. 身份验证和授权测试 测试目标 确保系统能够正确验证用户的身份,并根据用户的权限授予相应的访问权限。测试方法 弱密码测试:尝…...

ComfyUI和Photoshop相结合,PS内实现:文生图,图生图,高清放大,局部重绘,面部修复,设计师福音
本文主要介绍:ComfyUI和Photoshop相结合,一个平台实现:图像生成,放大,局部重绘,面部修复,实时绘画 简直是设计师的福音。 主要包括: Photoshop 的安装以及插件的安装 Creative Cl…...

使用 map 和 reduce 提取对象数组中的 id 并组成新数组
在开发过程中,经常需要对 API 返回的数据进行处理,例如从对象数组中提取某些字段,并将它们组成新的数组。这里我们将介绍如何通过 JavaScript 的 map 和 reduce 方法来完成这一需求,并深入比较这两者的用法与适用场景。 需求&…...

Zero-Shot Relational Learning for Multimodal Knowledge Graphs
摘要 关系学习是知识表示领域,特别是知识图补全(KGC)领域的一项重要任务。虽然传统单模态环境下的关系学习已经得到了广泛的研究,但在多模态KGC环境下探索关系学习提出了不同的挑战和机遇。其中一个主要挑战是在没有任何相关训练…...

AUTOSAR COM 模块的主要功能导读以及示例
AUTOSAR COM 模块的主要功能 AUTOSAR COM 模块在车载系统中用于管理通信的中间层,主要功能包括: 信号传输与接收: • 提供信号打包和解包功能,将信号数据打包成协议数据单元(I-PDU)以便传输,或从接收到的…...
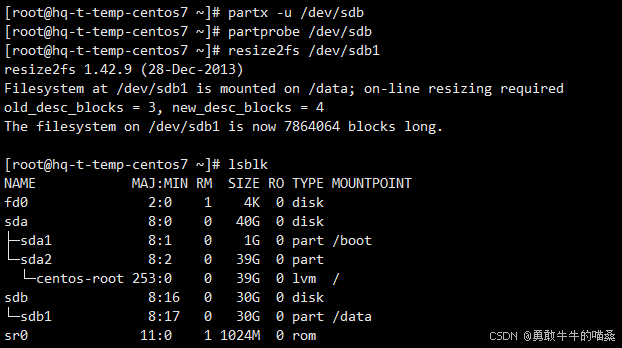
VMware下Centos7虚拟机数据盘/data目录(非lvm)不停机热扩容实操
实操环境 VMware:7.0 虚拟机:Centos7 (TEST-K8S-Node01) 扩容目录:/data (20G>>30G) 前置操作 注意事项:如果有条件的话,建议先做个主机的全量备份(…...

易盾增强版滑块识别/易盾识别/滑块识别/增强版滑块识别/易盾滑块本地识别
易盾增强版滑块识别 计算思路如下: 滑动条拖动距离传入 restrict 算法处理得到 初次值 J J * 率值0.309375 得到滑块偏移量。 滑块的旋转角度滑块偏移量*attrs 所以滑块偏移量滑块的旋转角度/attrs 通过滑块偏移量 求出 滑动条拖动距离 # 应用高斯模糊warped_…...
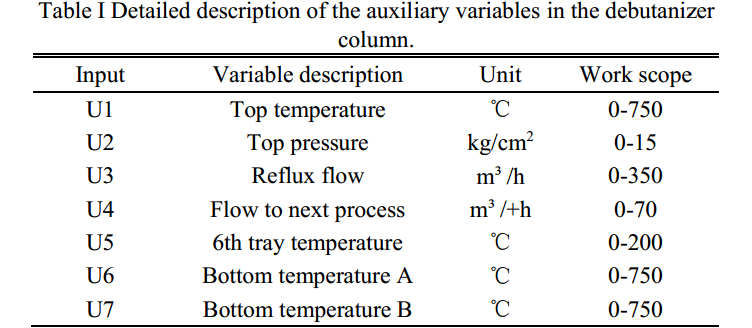
DMRl-Former用于工业过程预测建模和关键样本分析的数据模式相关可解释Transformer网络
DMRl-Former用于工业过程预测建模和关键样本分析的数据模式相关可解释Transformer网络 Liu, Diju, et al. “Data mode related interpretable transformer network for predictive modeling and key sample analysis in industrial processes.” IEEE Transactions on Indust…...

向量模型Jina Embedding: 从v1到v3论文笔记
文章目录 Jina Embedding: 从v1到v3Jina Embedding v1数据集准备训练过程 Jina Embedding v2预训练修改版BERT在文本对上微调在Hard Negatives上微调 Jina Embedding v2 双语言预训练修改版BERT在文本对上微调用多任务目标微调 Jina Embedding v3预训练在文本对上微调训练任务相…...

Spring学习笔记(一)
一 、Spring概述 (一)Spring是什么 Spring是一个分层的Java SE/EE full-stack(一站式)轻量级开源框架,以 IoC(Inverse Of Control:反转控制)和 AOP(Aspect Oriented Programming:面…...

Java编程基础
Java是一种广泛使用的编程语言,以其跨平台兼容性、面向对象的特性和健壮的安全性而闻名。本篇文章将带你了解Java编程的基础知识。 Java简介 Java是由Sun Microsystems(现在是Oracle Corporation的一部分)在1995年发布的。它是一种静态类型…...

C++【string类,模拟实现string类】
🌟个人主页:落叶 🌟当前专栏: C专栏 目录 为什么学习string类 C语言中的字符串 标准库中的string类 auto和范围for auto关键字 迭代器 范围for string类的常用接口说明和使用 1. string类对象的常见构造 2.string类对象的容量操作 3…...

如何5分钟完成HS2-HF_Patch安装:Honey Select 2汉化优化补丁终极指南
如何5分钟完成HS2-HF_Patch安装:Honey Select 2汉化优化补丁终极指南 【免费下载链接】HS2-HF_Patch Automatically translate, uncensor and update HoneySelect2! 项目地址: https://gitcode.com/gh_mirrors/hs/HS2-HF_Patch HS2-HF_Patch是一款专为《Hone…...

当 Agent 的输出需要符合特定格式规范
当 Agent 的输出需要符合特定格式规范:从混乱到可控的Prompt工程与结构化交互全解一、引言 (Introduction)钩子 (The Hook) 想象一个场景:你在训练一个医疗辅助诊断Agent,告诉它“把刚才的问诊结果整理成标准的HL7 FHIR Bundle”,…...

NoFences:开源免费的Windows桌面管理终极解决方案
NoFences:开源免费的Windows桌面管理终极解决方案 【免费下载链接】NoFences 🚧 Open Source Stardock Fences alternative 项目地址: https://gitcode.com/gh_mirrors/no/NoFences 厌倦了杂乱无章的桌面图标?不想为专业桌面管理软件付…...

【实战指南】如何用LIWC-python进行心理语言分析:5步快速上手方案
【实战指南】如何用LIWC-python进行心理语言分析:5步快速上手方案 【免费下载链接】liwc-python Linguistic Inquiry and Word Count (LIWC) analyzer 项目地址: https://gitcode.com/gh_mirrors/li/liwc-python LIWC-python是一个强大的心理语言学分析工具&…...

JMeter性能测试实战:从接口验证到分布式压测全链路
1. 这不是“点点点就能跑通”的工具,而是你接口质量的守门人很多人第一次打开 JMeter,以为它就是个“高级版 Postman”——填 URL、选方法、点执行,看到绿色小对勾就以为测试完成了。我带过三届测试团队,每届都有至少两个新人在压…...

如何用本地工具在千万级图片库中快速找到相似图片
如何用本地工具在千万级图片库中快速找到相似图片 【免费下载链接】ImageSearch 基于.NET10的本地硬盘千万级图库以图搜图案例Demo和图片exif信息移除小工具分享 项目地址: https://gitcode.com/gh_mirrors/im/ImageSearch 在数字时代,你的电脑里可能积累了成…...

小红书数据采集Python实战:3个技巧让你轻松获取公开内容
小红书数据采集Python实战:3个技巧让你轻松获取公开内容 【免费下载链接】xhs 基于小红书 Web 端进行的请求封装。https://reajason.github.io/xhs/ 项目地址: https://gitcode.com/gh_mirrors/xh/xhs 你是否曾经想要分析小红书上的热门话题,却苦…...

GitHub中文插件:打破语言壁垒,让开源协作更顺畅
GitHub中文插件:打破语言壁垒,让开源协作更顺畅 【免费下载链接】github-chinese GitHub 汉化插件,GitHub 中文化界面。 (GitHub Translation To Chinese) 项目地址: https://gitcode.com/gh_mirrors/gi/github-chinese 你是否曾在Git…...

QMcDump终极指南:三步解锁QQ音乐加密文件,实现音乐自由
QMcDump终极指南:三步解锁QQ音乐加密文件,实现音乐自由 【免费下载链接】qmcdump 一个简单的QQ音乐解码(qmcflac/qmc0/qmc3 转 flac/mp3),仅为个人学习参考用。 项目地址: https://gitcode.com/gh_mirrors/qm/qmcdum…...

从博弈论到可解释AI:Shapley值及其交互指数的原理与应用
1. 从博弈论到可解释AI:理解Shapley值的核心思想在机器学习模型日益复杂的今天,理解一个模型为何做出某个预测,其重要性不亚于模型本身的性能。想象一下,你训练了一个精准的房价预测模型,当它判断某套房子价值500万时&…...