强化学习_06_pytorch-PPO2实践(ALE/Breakout-v5)
一、环境适当调整
- 数据收集:
RecordEpisodeStatistics - 进行起始跳过n帧:
baseSkipFrame - 一条生命结束记录为done:
EpisodicLifeEnv - 得分处理成0或1:
ClipRewardEnv - 叠帧:
FrameStack- 图像环境的基本操作,方便CNN捕捉智能体的行动
- 向量空间reset处理修复
gym.vector.SyncVectorEnv: 原始代码中的reset是随机的- 继承重写的
spSyncVectorEnv方法,支持每个向量的环境的seed一致,利于同一seed下环境的训练
class spSyncVectorEnv(gym.vector.SyncVectorEnv):"""step_await _terminateds reset"""def __init__(self,env_fns: Iterable[Callable[[], Env]],observation_space: Space = None,action_space: Space = None,copy: bool = True,random_reset: bool = False,seed: int = None):super().__init__(env_fns, observation_space, action_space, copy)self.random_reset = random_resetself.seed = seeddef step_wait(self) -> Tuple[Any, NDArray[Any], NDArray[Any], NDArray[Any], dict]:"""Steps through each of the environments returning the batched results.Returns:The batched environment step results"""observations, infos = [], {}for i, (env, action) in enumerate(zip(self.envs, self._actions)):(observation,self._rewards[i],self._terminateds[i],self._truncateds[i],info,) = env.step(action)if self._terminateds[i]:old_observation, old_info = observation, infoif self.random_reset:observation, info = env.reset(seed=np.random.randint(0, 999999))else:observation, info = env.reset() if self.seed is None else env.reset(seed=self.seed) info["final_observation"] = old_observationinfo["final_info"] = old_infoobservations.append(observation)infos = self._add_info(infos, info, i)self.observations = concatenate(self.single_observation_space, observations, self.observations)return (deepcopy(self.observations) if self.copy else self.observations,np.copy(self._rewards),np.copy(self._terminateds),np.copy(self._truncateds),infos,)
二、pytorch实践
2.1 智能体构建与训练
详细可见 Github: test_ppo_atari.Breakout_v5_ppo2_test
调整向量环境的reset 之后,
- 支持actor, criticor用同一个cnn层提取特征(
PPOSharedCNN) - 对
eps进行了调小->eps=0.165,希望更新的策略范围更小一些; - 关闭学习率衰减
- 进行不同
ent_coef的尝试: 稍微大一点,增加agent的探索;ent_coef=0.015&batch_size=256+128batch陡降-回升慢ent_coef=0.025&batch_size=256陡降回升-最终reward=311- √
ent_coef=0.05&batch_size=256-最终PPO2__AtariEnv instance__20241029__2217 reward=416 ent_coef=0.05&batch_size=256+128ent_coef=0.1&batch_size=256提升过于平缓


env_name = 'ALE/Breakout-v5'
env_name_str = env_name.replace('/', '-')
gym_env_desc(env_name)
print("gym.__version__ = ", gym.__version__ )
path_ = os.path.dirname(__file__)
num_envs = 12
episod_life = True
clip_reward = True
resize_inner_area = True # True
env_pool_flag = False # True
seed = 202404
envs = spSyncVectorEnv([make_atari_env(env_name, skip=4, episod_life=episod_life, clip_reward=clip_reward, ppo_train=True, max_no_reward_count=120, resize_inner_area=resize_inner_area) for _ in range(num_envs)],random_reset=False,seed=202404
)
dist_type = 'norm'
cfg = Config(envs, save_path=os.path.join(path_, "test_models" ,f'PPO2_{env_name_str}-2'), seed=202404,num_envs=num_envs,episod_life=episod_life,clip_reward=clip_reward,resize_inner_area=resize_inner_area,env_pool_flag=env_pool_flag,# 网络参数 Atria-CNN + MLPactor_hidden_layers_dim=[512, 256], critic_hidden_layers_dim=[512, 128], # agent参数actor_lr=4.5e-4, gamma=0.99,# 训练参数num_episode=3600, off_buffer_size=128, max_episode_steps=128, PPO_kwargs={'cnn_flag': True,'clean_rl_cnn': True,'share_cnn_flag': True,'continue_action_flag': False,'lmbda': 0.95,'eps': 0.165, # 0.165'k_epochs': 4, # update_epochs'sgd_batch_size': 512, 'minibatch_size': 256, 'act_type': 'relu','dist_type': dist_type,'critic_coef': 1.0, # 1.0'ent_coef': 0.05, 'max_grad_norm': 0.5, 'clip_vloss': True,'mini_adv_norm': True,'anneal_lr': False,'num_episode': 3600,}
)
minibatch_size = cfg.PPO_kwargs['minibatch_size']
max_grad_norm = cfg.PPO_kwargs['max_grad_norm']
cfg.trail_desc = f"actor_lr={cfg.actor_lr},minibatch_size={minibatch_size},max_grad_norm={max_grad_norm},hidden_layers={cfg.actor_hidden_layers_dim}",
agent = PPO2(state_dim=cfg.state_dim,actor_hidden_layers_dim=cfg.actor_hidden_layers_dim,critic_hidden_layers_dim=cfg.critic_hidden_layers_dim,action_dim=cfg.action_dim,actor_lr=cfg.actor_lr,critic_lr=cfg.critic_lr,gamma=cfg.gamma,PPO_kwargs=cfg.PPO_kwargs,device=cfg.device,reward_func=None
)
agent.train()
ppo2_train(envs, agent, cfg, wandb_flag=True, wandb_project_name=f"PPO2-{env_name_str}-NEW",train_without_seed=False, test_ep_freq=cfg.off_buffer_size * 10, online_collect_nums=cfg.off_buffer_size,test_episode_count=10, add_max_step_reward_flag=False,play_func='ppo2_play',ply_env=ply_env
)
2.2 训练出的智能体观测
最后将训练的最好的网络拿出来进行观察
env = make_atari_env(env_name, skip=4, episod_life=episod_life, clip_reward=clip_reward, ppo_train=True, max_no_reward_count=120, resize_inner_area=resize_inner_area, render_mode='human')()
ppo2_play(env, agent, cfg, episode_count=2, play_without_seed=False, render=True, ppo_train=True)

相关文章:
强化学习_06_pytorch-PPO2实践(ALE/Breakout-v5)
一、环境适当调整 数据收集:RecordEpisodeStatistics进行起始跳过n帧:baseSkipFrame一条生命结束记录为done:EpisodicLifeEnv得分处理成0或1:ClipRewardEnv叠帧: FrameStack 图像环境的基本操作,方便CNN捕捉智能体的行动 向量空间reset处理修…...

《JVM第8课》垃圾回收算法
文章目录 1.标记算法1.1 引用计数法1.2 可达性分析法 2.回收算法2.1 标记-清除算法(Mark-Sweep)2.2 复制算法(Coping)2.3 标记-整理算法(Mark-Compact) 3.三种垃圾回收算法的对比 为什么要进行垃圾回收&…...
)
SpringBoot整合Freemarker(二)
if分支 语法: <#if condition>... <#elseif condition2>... <#elseif condition3>... <#else>... </#if> 例子: <#if x 1>x is 1 </#if> --------------------------------- <#if x 1>x is 1 <…...

element plus el-form自定义验证输入框为纯数字函数
element plus 的el-form 使用自定义验证器,验证纯数字,禁止输入小数、中文、字母、特殊符号。input的maxlength为最大输入多少位长度 效果图 <el-form ref"dataFormRef" :model"dataForm" :rules"dataRules" label-w…...

Android笔记(三十一):Deeplink失效问题
背景 通过deeplink启动应用之后,没关闭应用的情况下,再次使用deeplink会失效的问题,是系统bug导致的。此bug仅在某些设备(Nexus 5X)上重现,launchMode并且仅当应用程序最初通过深层链接启动并再次通过深层…...

图神经网络初步实验
实验复现来源 https://zhuanlan.zhihu.com/p/603486955 该文章主要解决问题: 1.加深对图神经网络数据集的理解 2.加深对图神经网络模型中喂数据中维度变化的理解 原理问题在另一篇文章分析: 介绍数据集:cora数据集 其中的主要内容表示为…...

创建线程时传递参数给线程
在C中,可以使用 std::thread 来创建和管理线程,同时可以通过几种方式将参数传递给线程函数。这些方法包括使用值传递、引用传递和指针传递。下面将对这些方法进行详细讲解并给出相应的代码示例。 1. 值传递参数 当你创建线程并希望传递参数时ÿ…...

兴业严选|美国总统都是不良资产出身 法拍市场是否将大众化
北京时间11月6日,特朗普赢得美国大选。 说起特朗普那就不得不提他的发家史,那可真是一笔笔不良资产投资堆出来的。 没错,特朗普就是处理不良资产的高手,战果丰硕。 改造斯威夫特小镇、 康莫德酒店、打造特朗普(TRUM…...

C#-拓展方法
概念:为现有的非静态变量类型,添加方法 语法: 访问修饰符 static 返回值 函数名(this 拓展类名 参数名, 参数类型 参数名,参数类型 参数名....){} 而public static void F(this Console()){ }是错的。Console是静态类不可以为静态类添加方…...
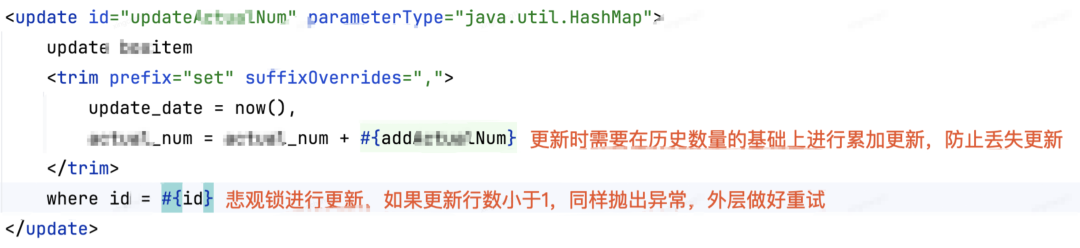
加锁失效,非锁之过,加之错也|京东零售供应链库存研发实践
本文导读 从事京东零售供应链库存业务,库存数量操作增减十分频繁,并且项目开发中会常常遇到各种并发情况,一旦库存数量操作有误,势必给前台销售产生损失影响,因此需要关注对库存数量并发操作下的一致性问题。 大部分…...

vue3 传值的几种方式
一.父组件传子组件 父组件 //父组件 <Decisionobject :Decisionselected"Decisionselected"></Decisionobject> <script lang"ts" setup> let Decisionselected ref(false); </script>子组件 <script lang"ts" s…...

AUTOSAR CP NVRAM Manager规范导读
一、NVRAM Manager功能概述 NVRAM Manager是AUTOSAR(AUTomotive Open System ARchitecture)框架中的一个模块,负责管理非易失性随机访问存储器(NVRAM)。它提供了一组服务和API,用于在汽车环境中存储、维护和恢复NV数据。以下是NVRAM Manager的一些关键功能: 数据存储和…...
2024阿里云CTF Web writeup
《Java代码审计》http://mp.weixin.qq.com/s?__bizMzkwNjY1Mzc0Nw&mid2247484219&idx1&sn73564e316a4c9794019f15dd6b3ba9f6&chksmc0e47a67f793f371e9f6a4fbc06e7929cb1480b7320fae34c32563307df3a28aca49d1a4addd&scene21#wechat_redirect 前言 又是周末…...

软件著作权申请教程(超详细)(2024新版)软著申请
目录 一、注册账号与实名登记 二、材料准备 三、申请步骤 1.办理身份 2.软件申请信息 3.软件开发信息 4.软件功能与特点 5.填报完成 一、注册账号与实名登记 首先我们需要在官网里面注册一个账号,并且完成实名认证,一般是注册【个人】的身份。中…...

三维测量与建模笔记 - 3.2 直接线性变换法标定DLT
DLT - Direct Linear Transform 上图中,透视成像对应的公式是共线方程,可以参考以下链接: https://zhuanlan.zhihu.com/p/101549821https://zhuanlan.zhihu.com/p/101549821 对于标定来说,需要找到。已知量是。 (u,v)是…...

Whisper AI视频(音频)转文本
在信息化时代,如何高效处理丰富的音频和视频内容成为了一个重要课题。将这些内容转化为文本不仅能提高信息的可获取性,还能促进更广泛的传播。Whisper Desktop作为一款先进的语音识别工具,能够帮助用户轻松实现音频和视频的转文本功能。 什么…...
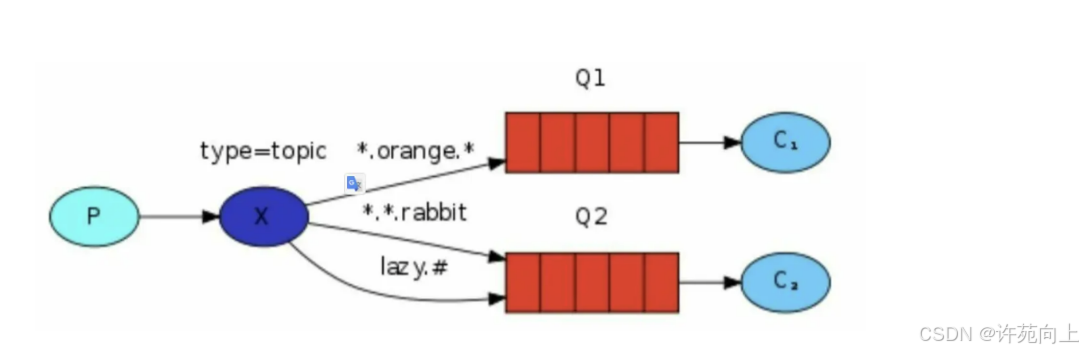
全网最详细RabbitMQ教学包括如何安装环境【RabbitMQ】RabbitMQ + Spring Boot集成零基础入门(基础篇)
目录 一、初始Rabbitmq1、什么是Rabbitmq,它的概述是什么?2、RabbitMQ的应用场景3、RabbitMQ主要组件4、RabbitMQ 的优点5、与其他消息队列性能比较 二、RabbitMQ环境安装初始化三、SpringAMQPRabbitMQ实战入门(基本API)1、实战入…...

esp32记录一次错误
报错信息 PS C:\XingNian\GeRen\4Gdownload\wireless-esp8266-dap> idf.py build Executing action: all (aliases: build) Running cmake in directory c:\xingnian\geren\4gdownload\wireless-esp8266-dap\build Executing "cmake -G Ninja -DPYTHON_DEPS_CHECKED1 …...

Moonshine - 新型开源ASR(语音识别)模型,体积小,速度快,比OpenAI Whisper快五倍 本地一键整合包下载
Moonshine 是由 Useful Sensors 公司推出的一系列「语音到文本(speech-to-text, STT)转换模型」,旨在为资源受限设备提供快速而准确的「自动语音识别(ASR)服务」。Moonshine 的设计特别适合于需要即时响应的应用场景&a…...

java-web-苍穹外卖-day1:软件开发步骤简化版+后端环境搭建
软件开发 感觉书本上和线上课程, 讲的太抽象, 不好理解, 但软件开发不就是为了开发应用程序吗?! 干嘛搞这么抽象,对吧, 下面个人对于软件开发的看法, 主打简单易懂, 当然,我一IT界小菜鸟, 对软件开发的认识也很浅显, 这个思维导图也仅仅是现阶段我的看法, 我以后会尽力…...

创业团队如何通过taotoken的token plan有效控制ai应用开发成本
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 创业团队如何通过taotoken的token plan有效控制ai应用开发成本 对于资源有限的创业团队和独立开发者而言,在开发AI应用…...

AI辅助开发笔记
参考文章 Visual Studio 中的 AI 辅助开发基于Ollama的本地大模型自动化编程实践指南 open-webuiollama ollama 安装 wget https://ollama.com/install.sh sh install.sh # 若网速比较慢,可借助洪荒之力 # proxychains wget https://ollama.com/install.sh # pr…...

Perplexity计算原理与业务落地脱节?——资深算法架构师亲授7步校准法,避免模型上线翻车
更多请点击: https://codechina.net 第一章:Perplexity的本质定义与数学直觉 Perplexity(困惑度)是衡量概率模型对未知序列预测能力的核心指标,其本质是交叉熵的指数形式,直观反映了模型在面对真实数据时的…...

从‘盲猜’到‘先知’:深度解读神经RRT*如何让采样规划拥有‘大局观’
神经RRT*:当路径规划算法学会"思考"的范式革命 在自动驾驶汽车寻找最短路径、无人机规划避障航线的场景中,传统RRT算法就像一位盲人摸象的探险者——它通过随机撒点的方式探索环境,虽然最终能找到出路,却需要耗费大量时…...

惠普OMEN笔记本终极性能控制:OmenSuperHub 5分钟完全指南
惠普OMEN笔记本终极性能控制:OmenSuperHub 5分钟完全指南 【免费下载链接】OmenSuperHub 使用 WMI BIOS控制性能和风扇速度,自动解除DB功耗限制。 项目地址: https://gitcode.com/gh_mirrors/om/OmenSuperHub 想要彻底释放惠普OMEN游戏本的性能潜…...

BBDown实用指南:高效下载B站视频的完整解决方案
BBDown实用指南:高效下载B站视频的完整解决方案 【免费下载链接】BBDown Bilibili Downloader. 一个命令行式哔哩哔哩下载器. 项目地址: https://gitcode.com/gh_mirrors/bb/BBDown BBDown是一个功能强大的命令行式哔哩哔哩视频下载器,专为技术爱…...

使用openclaw配置taotoken实现自动化agent工作流的实践指南
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 使用OpenClaw配置Taotoken实现自动化Agent工作流的实践指南 1. 概述:OpenClaw与Taotoken的集成价值 OpenClaw是一个用…...

从面积与性能权衡出发:深度解析Tessent MBIST中Bypass/Observation逻辑的配置艺术
从面积与性能权衡出发:深度解析Tessent MBIST中Bypass/Observation逻辑的配置艺术 在芯片设计领域,测试逻辑的插入往往被视为一把双刃剑。一方面,它确保了芯片的可测试性和可靠性;另一方面,这些额外逻辑又不可避免地带…...

基于8ms平台的嵌入式GUI开发实践:智能家居86盒UI设计与实现
1. 项目概述:当智能家居遇上8ms,一个86盒的UI革命 最近在折腾一个智能家居的改造项目,核心是想把家里那些老旧的开关面板,换成能联网、能自定义、还能显示点信息的“智能大脑”。市面上现成的智能开关要么功能固化,要么…...

书籍分享:《VirtualLab Fusion物理光学实验教程》
第一章 物理光学概念介绍 1.1 几何光学和光线追迹 1.2 物理光学和光场追迹 1.3 电场、磁场以及坡印廷矢量 1.4 振幅、相位及实部和虚部 1.5 振幅、相位与偏振 1.6菲涅尔公式 1.7 全反射 1.8倏逝波 第二章 光的干涉及干涉系统建模仿真 2.1 牛顿环模拟仿真 2.1.1 牛顿…...