ROS机器视觉入门:从基础到人脸识别与目标检测
前言
从本文开始,我们将开始学习ROS机器视觉处理,刚开始先学习一部分外围的知识,为后续的人脸识别、目标跟踪和YOLOV5目标检测做准备工作。我采用的笔记本是联想拯救者游戏本,系统采用Ubuntu20.04,ROS采用noetic。
颜色编码格式,图像格式和视频压缩格式
(1)RGB和BGR:这是两种常见的颜色编码格式,分别代表了红、绿、蓝三原色。不同之处在于,RGB按照红、绿、蓝的顺序存储颜色信息,而BGR按照蓝、绿、红的顺序存储。
rgb8图像格式:常用于显示系统,如电视和计算机屏幕。RGB值以8 bits表示每种颜色,总共可以表示256×256×256=16777216种颜色。例如: (255,0,0) 表示红色,(0,255,0) 表示绿色,(0,0,255) 表示蓝色。
bgr8图像格式:由一些特定的硬件制造商采用,软件方面最著名的就是opencv,其默认使用BGR的颜色格式来处理图像。与RGB不同, (0,0,255) 在BGR中表示红色,(0,255,0) 仍然表示绿色,(255,0,0) 表示蓝色。在自动驾驶里,使用rgb8图像格式的图像,一般称为原图,是数据量最大的格式,没有任何压缩。(2)(2)YUV:这是另一种颜色编码方法,与RGB模型不同的是,它将图像信息分解为亮度(Y)和色度(U和V)两部分。这种方式更接近于人类对颜色的感知方式。
Y:代表亮度信息,也就是灰阶值。
U:从色度信号中减去Y得到的蓝色信号的差异值。
V:从色度信号中减去Y得到的红色信号的差异值。YUV颜色编码主要用在电视系统以及视频编解码标准中,在这些系统中,Y通道信息可以单独使用,这样黑白电视机也能接收和显示信号。而彩色信息则通过U和V两个通道传输,只有彩色电视机才能处理。这样设计兼容了黑白电视和彩色电视。YUV色彩空间相比RGB色彩空间,更加符合人眼对亮度和色彩的敏感度,在视频压缩时,可以按照人眼的敏感度对YUV数据进行压缩,以达到更高的压缩比。由于历史和技术的原因,YUV的标准存在多种,例如YUV 4:4:4、YUV 4:2:2和YUV 4:2:0等,这些主要是针对U和V通道的采样方式不同定义的。采样不同,对应的压缩比也不同。
(3)图像压缩格式:
jpeg:Joint Photographic Experts Group,是一种常见的用于静态图像的损失性压缩格式,它特别适合于全彩色和灰度图片,被广泛使用。通常情况下,JPEG可以提供10:1到20:1的有损压缩比,根据图像质量自由调整。
png: Portable Network Graphics,PNG是一种无损压缩格式,主要使用了DEFLATE算法。由于这是无损压缩,所以解压缩图像可以完全恢复原始数据。被广泛应用于需要高质量图像的场景,如网页设计、艺术作品等。
bmp:Bitmap,BMP是Windows系统中常用的一种无压缩的位图图像格式,通常会创造出较大的文件。位图(Bitmap)是一种常见的计算机图形,最小单位是像素,每个像素都包含一定量的信息,如颜色和亮度等。位图图像的一个主要特点就是,在放大查看时,可以看到图像的像素化现象,也就是我们常说的"马赛克"。BMP、JPEG、GIF、PNG等都是常见的位图格式。
(4)H264和H265:这是两个视频压缩格式,也是两种视频编解码标准。以1280*720的摄像头为例,如果是rgb8格式的原图,一帧图像的大小是:
3*1280*720=27648000字节,即2.7648MB
如果是一小时的视频,那将是非常大的数据量,对网络传输,数据存储,都是很大的压力。而H264通过种种帧间操作,可以达到10:1到50:1的压缩比,甚至更高。H265更进一步,压缩比更高,用来解决4K或8K视频的传输。
更具体的原理见:图像编码与 H264 基础知识在自动驾驶领域,图像数据也使用h264格式,主要用于数采和回放,控制数据量。
usb_cam
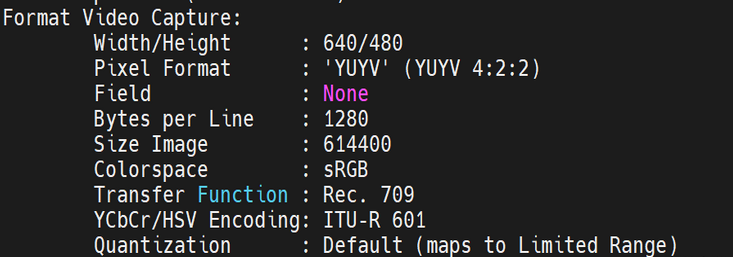
(1)linux针对摄像头硬件有一套Video for Linux内核驱动框架,对应提供的有命令行工具 v4l2-ctl (Video for Linux 2),可以查看摄像头硬件信息:
ls /dev/video0 //一般video0是笔记本自带摄像头设备文件
v4l2-ctl -d /dev/video0 --all这里截取了部分关键信息,下面的usb_cam的launch文件将用到:
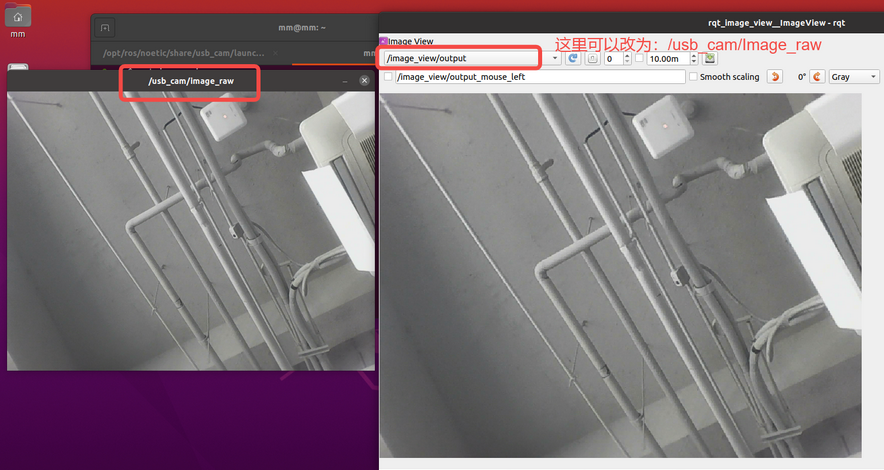
(2)usb_cam是ros里usb camera的软件包,一般称为ros摄像头驱动,但这是一个应用程序,其调用v4l2并通过ros topic发出图像数据。搞机器视觉,第一步就是要有图。安装并启动usb_cam,查看图像:
sudo apt-get install ros-noetic-usb-cam
roslaunch usb_cam usb_cam-test.launch
rqt_image_viewusb_cam-test.launch:
<launch><node name="usb_cam" pkg="usb_cam" type="usb_cam_node" output="screen" >//指定设备文件名,默认是/dev/video0<param name="video_device" value="/dev/video0" />// 宽和高分辨率 <param name="image_width" value="640" /><param name="image_height" value="480" />// 像素编码,可选值:mjpeg,yuyv,uyvy<param name="pixel_format" value="yuyv" /><param name="color_format" value="yuv422p" />// camera坐标系名<param name="camera_frame_id" value="usb_cam" />// IO通道,可选值:mmap,read,userptr,大数据量信息一般用mmap<param name="io_method" value="mmap"/></node><node name="image_view" pkg="image_view" type="image_view" respawn="false" output="screen">// 指定发出的topic名:/usb_cam/image_raw<remap from="image" to="/usb_cam/image_raw"/><param name="autosize" value="true" /></node>
</launch>
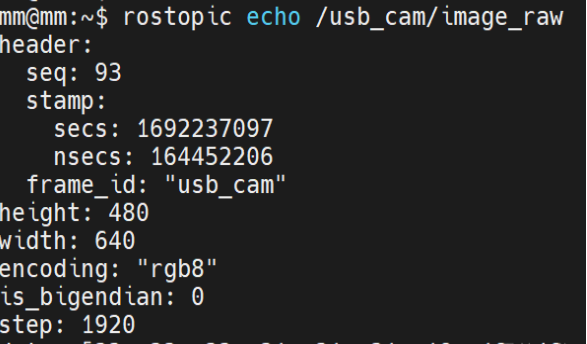
(3)/usb_cam/image_raw的数据结构体:
rostopic info /usb_cam/image_raw
rosmsg show sensor_msgs/Image//消息头,每个topic都有
std_msgs/Header header uint32 seqtime stamp// 坐标系名string frame_id
// 高和宽分辨率
uint32 height
uint32 width
// 无压缩的图像编码格式,包括rgb8,YUV444
string encoding
// 图像数据的大小端存储模式
uint8 is_bigendian
// 一行图像数据的字节数量,作为步长参数
uint32 step
// 存储图像数据的柔性数组,大小是step*height
uint8[] data/usb_cam/image_raw内容展示:
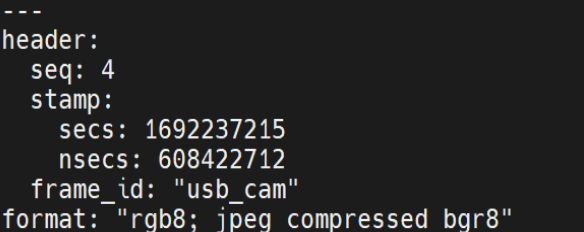
(4)/usb_cam/image_raw/compressed的数据结构体:
rostopic info /usb_cam/image_raw/compressed
rosmsg show sensor_msgs/CompressedImagestd_msgs/Header headeruint32 seqtime stampstring frame_id
// 压缩的图像编码格式,jpeg,png
string format
uint8[] data/usb_cam/image_raw/compressed内容展示:
摄像头标定
标定引入
(1)Calibration:翻译过来就是校准和标定。(2)摄像头标定:Camera Calibration是计算机视觉中的一种关键技术,其目的是确定摄像头的内部参数(Intrinsic Parameters)和外部参数(Extrinsic Parameters)。
内部参数:包括焦距、主点坐标以及镜头畸变等因素。这些参数与相机本身的硬件有关,如镜头和图像传感器等,一般由厂家提供。
外部参数:摄像头相对于环境的位置和方向。例如,它可能描述了一个固定摄像头相对于周围环境的姿态或者安装位置。以汽车为例,外参包括各个摄像头之间的关系,摄像头与radar,摄像头与lidar的关系。(3)汽车各种传感器的之间的相对位置和朝向,用3自由度的旋转矩阵和3自由度的平移向量表示,这些外参由整车厂自己标。一般整车下线之后,进入特定的房间,使用静态标靶、定位器的等高精度设备,完成Camera、radar、Lidar等传感器的标定,称之为产线标定,也叫做下线标定。
笔记本摄像头内参标定
这里我们使用标定常用的标靶图形,完成笔记本摄像头的内参标定。usb_cam可以使用内参标定,避免图像畸变。(1)安装标定功能包(ubuntu20.04+noetic)
sudo apt-get install ros-noetic-camera-calibration(2)创建 robot_vision 软件包,并标定相关文件
cd ~/catkin_ws/src
catkin_create_pkg robot_vision cv_bridge image_transport sensor_msgs std_msgs geometry_msgs message_generation roscpp rospycd robot_vision
mkdir doc launch
touch launch/cameta_calibration.launch标定靶图片:
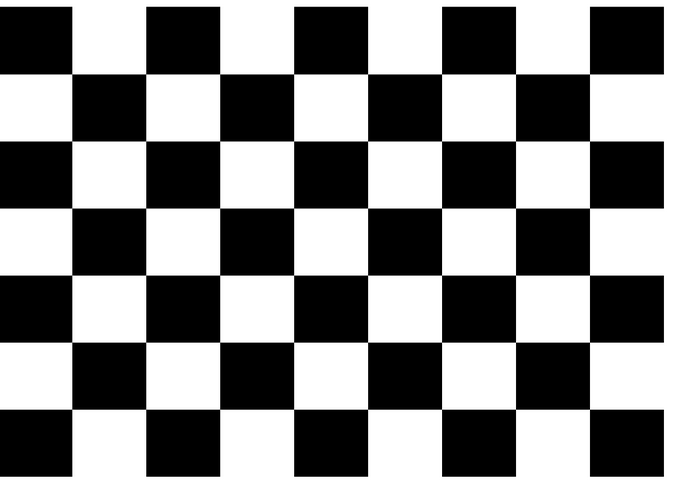
cameta_calibration.launch:
<launch>// 使用usb_cam包,发出/usb_cam/image_raw图像数据<node name="usb_cam" pkg="usb_cam" type="usb_cam_node" output="screen" ><param name="video_device" value="/dev/video0" /><param name="image_width" value="640" /><param name="image_height" value="480" /><param name="pixel_format" value="yuyv" /><param name="camera_frame_id" value="usb_cam" /><param name="io_method" value="mmap"/></node>// 使用标定功能包,完成标定。// 参数中,8x6表示横向8个内部角点,竖向有6个// square 是每个棋盘格的边长// /usb_cam/image_raw是监听的图像topic<nodepkg="camera_calibration"type="cameracalibrator.py"name="camera_calibration"output="screen"args="--size 8x6 --square 0.024 image:=/usb_cam/image_raw camera:=/usb_cam"/>
</launch>(3)编译并运行
cd ~/catkin_ws/
catkin_make --source src/robot_vision
source devel/setup.bash
roslaunch robot_vision cameta_calibration.launch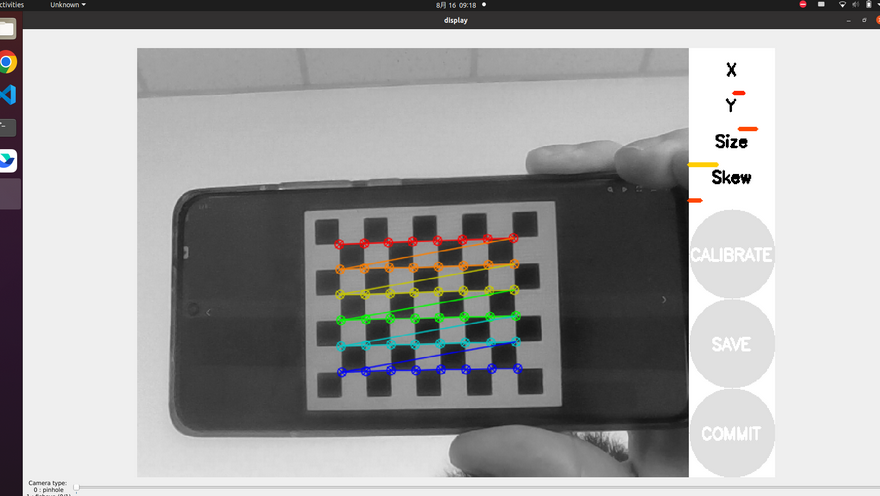
不断晃动,直到COMMIT按键亮起,然后点击,即可生成标定文件,本人的路径为:/home/mm/.ros/camera_info/head_camera.yaml。
opencv和cv_bridge引入
(1)opencv和cv_bridge
安装opencv(ubuntu20.04+noetic):
sudo apt-get install ros-noetic-vision-opencv libopencv-dev python3-opencv(2)opencv和cv_bridge的简单架构图如下:
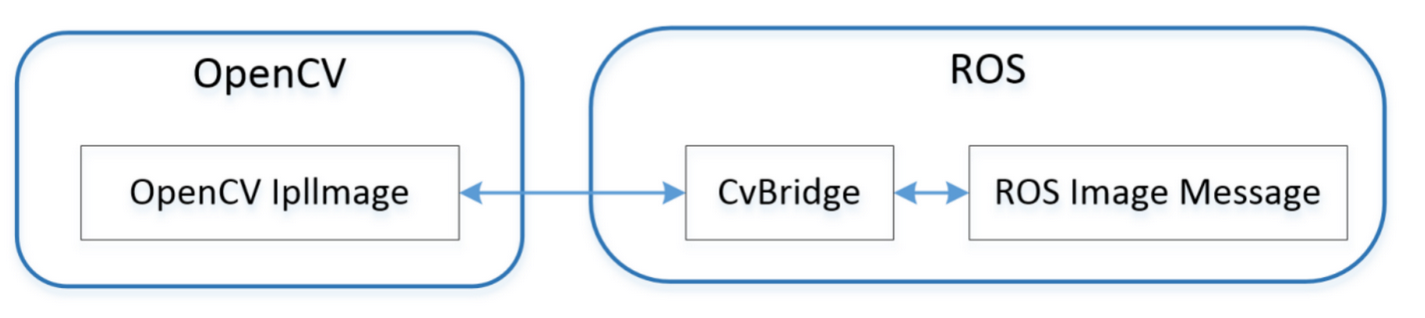
根据这个图,在ros里,处理图像的流程一般是:
# 第一步:使用cv_bridge将ROS的图像数据转换成OpenCV的图像格式cv_image = cv_bridge.imgmsg_to_cv2(msg, "bgr8")# 第二步:使用opencv进行图像处理。。。# 第三步,再将opencv格式额数据转换成ros image格式的数据ros_image = cv_bridge.cv2_to_imgmsg(cv_image, "bgr8")(3)在 上节的robot_vision包里,我们新增一个cv_bridge的小样例,主要功能是在捕捉到的图像上打个蓝色的圆标。
本文不深入讲解opencv,推荐一个资料:W3Cschool - OpenCV教程
cv_bridge_test.py:
#! /usr/bin/env python3
# -*- coding: utf-8 -*-
import rospy
import cv2
from functools import partial
from cv_bridge import CvBridge, CvBridgeError
from sensor_msgs.msg import Imagedef image_cb(msg, cv_bridge, image_pub):# 使用cv_bridge将ROS的图像数据转换成OpenCV的图像格式try:cv_image = cv_bridge.imgmsg_to_cv2(msg, "bgr8")except CvBridgeError as e:print(e)# 在opencv的显示窗口中绘制一个圆,作为标记# cv_image.shape返回一个元组,包含图像的行数(高度),列数(宽度)和通道数(通常是3个通道:BGR)(rows, cols, channels) = cv_image.shape# 当图像的宽度和高度都大于60时,才执行画圆标动作if cols > 60 and rows > 60:# 在计算机图像处理中,图像的原点(0,0)通常定义为图像的左上角。(60,60)是圆心的坐标。# 30是圆的半径。# (255,0,0)定义了圆的颜色。在OpenCV中,默认的颜色空间是BGR,所以这其实是绘制了一个蓝色的圆。# -1表示填充圆。如果这个值是正数,则代表绘制的圆的线宽;如果是负数,则代表填充该圆。cv2.circle(cv_image, (60,60), 30, (255,0,0), -1)# 使用Opencv的接口,显示Opencv格式的图像cv2.imshow("ycao: opencv image window", cv_image)cv2.waitKey(3)# 再将opencv格式额数据转换成ros image格式的数据发布try:image_pub.publish(cv_bridge.cv2_to_imgmsg(cv_image, "bgr8"))except CvBridgeError as e:print(e)def main():rospy.init_node("cv_bridge_test")rospy.loginfo("starting cv_bridge_test node")bridge = CvBridge()image_pub = rospy.Publisher("/cv_bridge_image", Image, queue_size=1)bind_image_cb = partial(image_cb, cv_bridge=bridge, image_pub=image_pub)// 订阅/usb_cam/image_raw,然后再回调函数里处理图像,并发布出来rospy.Subscriber("/usb_cam/image_raw", Image, bind_image_cb)rospy.spin()cv2.destroyAllWindows()
if __name__ == "__main__":main()cv_bridge_test.launch
<launch><node name="usb_cam" pkg="usb_cam" type="usb_cam_node" output="screen" ><param name="video_device" value="/dev/video0" /><param name="image_width" value="640" /><param name="image_height" value="480" /><param name="pixel_format" value="yuyv" /><param name="camera_frame_id" value="usb_cam" /><param name="io_method" value="mmap"/></node><nodepkg="robot_vision"type="cv_bridge_test.py"name="cv_bridge_test"output="screen"/><nodepkg="rqt_image_view"type="rqt_image_view"name="rqt_image_view"output="screen"/>
</launch>(4)编译并运行
cd ~/catkin_ws/
catkin_make --source src/robot_vision
source devel/setup.bash
roslaunch robot_vision cv_bridge_test.launch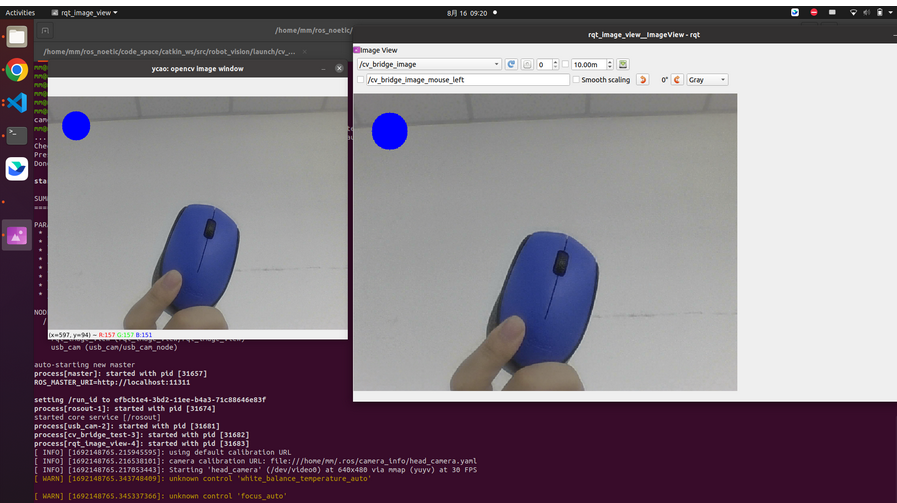
总结
本文主要系统介绍了机器视觉处理的外围知识,引入了opencv和cv_bridge,后面几篇文章,我们将用它们继续丰富 robot_vision 软件包。
相关文章:
ROS机器视觉入门:从基础到人脸识别与目标检测
前言 从本文开始,我们将开始学习ROS机器视觉处理,刚开始先学习一部分外围的知识,为后续的人脸识别、目标跟踪和YOLOV5目标检测做准备工作。我采用的笔记本是联想拯救者游戏本,系统采用Ubuntu20.04,ROS采用noetic。 颜…...

2024 APMCM亚太数学建模C题 - 宠物行业及相关产业的发展分析和策略(详细解题思路)
在当下, 日益发展的时代,宠物的数量应该均为稳步上升,在美国出现了下降的趋势, 中国 2019-2020 年也下降,这部分变化可能与疫情相关。需要对该部分进行必要的解释说明。 问题 1: 基于附件 1 中的数据及您的团队收集的…...

C#里怎么样访问文件时间
C#里怎么样访问文件时间 文件时间也是一个关键信息, 因为很多数据处理需要时间来判断数据的有效性,比如股票中的股价, 它是的权重,是随着时间递减的。 一般来说,超过5年以上的数据,都是可以删除掉了。 或者说超过三年的数据,就需要压缩保存了,这样可以省掉很多磁盘空…...
Cesium教程01_认识View
Cesium 地图视图组件 目录 一、引言二、功能说明三、代码实现 1. 模板结构2. 脚本逻辑3. 样式设计 四、总结 一、引言 在三维地球可视化中,Cesium 是一个强大的开源 JavaScript 库,它能够展示精美的地球和地图应用。本示例展示了如何使用 Vue 组件化…...

【SQL Server】华中农业大学空间数据库实验报告 实验八 存储过程
1.实验目的 通过实验课程与理论课的学习深入理解掌握的存储过程的原理、创建、修改、删除、基本的使用方法、主要用途,并且可以在练习的基础上,熟练使用存储过程来进行数据库的应用程序的设计;深入学习深刻理解与存储过程相关的T-SQL语句的编…...

ArcMap 处理栅格数据的分辨率功能操作
ArcMap 处理栅格数据的分辨率功能操作 一、统一多分辨率栅格数据 1、查看两个栅格数据的分辨率 1)raster1 点击属性 2) raster2 2、统一像元大小 1)点击环境 展示和填写 处理范围 栅格分析 点击确定 3、重采样 让raster1和..2保持一致,即…...
 ae事件处理器(一))
redis7.x源码分析:(4) ae事件处理器(一)
ae模块是redis实现的Reactor模型的封装。它的主要代码实现集中在 ae.c 中,另外还提供了平台相关的io多路复用的封装,它们都实现了一套相同的poll接口,就类似于C中提供了一个接口基类,由针对不同平台的派生类去实现。 // 创建平台…...

【React】React Router:深入理解前端路由的工作原理
🌈个人主页: 鑫宝Code 🔥热门专栏: 闲话杂谈| 炫酷HTML | JavaScript基础 💫个人格言: "如无必要,勿增实体" 文章目录 React Router:深入理解前端路由的工作原理路由的演进历程传统多页面…...

51单片机-独立按键与数码管联动
独立键盘和矩阵键盘检测原理及实现 键盘的分类:编码键盘和非编码键盘 键盘上闭合键的识别由专用的硬件编码器实现,并产生键编码号或键值的称为编码键盘,如:计算机键盘。靠软件编程识别的称为非编码键盘;在单片机组成…...

visual studio 2005的MFC各种线程函数之间的调用关系
在 Visual Studio 2005 的 MFC 程序中的函数和消息机制涉及线程间通信、消息处理以及与窗口消息的交互。接下来我将详细分析以下每个函数的作用、如何使用它们以及它们之间的调用关系。 1. PostThreadMessage(m_iThOpID, MSG_OP_OVER, 0, (LPARAM)iLparm); 函数用途࿱…...

网页中调用系统的EXE文件,如打开QQ
遇到一个实际的问题,需要在网页中打开本地的某个工业软件。 通过点击exe文件就可以调用到程序。 比如双击qq的exe就可以启动qq的程序。 那么问题就变成了如何加载exe程序呢? 可以通过Java的 Process process Runtime.getRuntime().exec(command);通过…...

【单点知识】基于PyTorch讲解自动编码器(Autoencoder)
文章目录 0. 前言1. 自动编码器的基本概念1.1 定义1.2 目标1.3 结构 2. PyTorch实现自动编码器2.1 导入必要的库2.2 定义自动编码器模型2.3 加载数据2.4 训练自动编码器 3. 自动编码器的意义4. 自动编码器的应用4.1 图像处理4.2自然语言处理:4.3推荐系统:…...
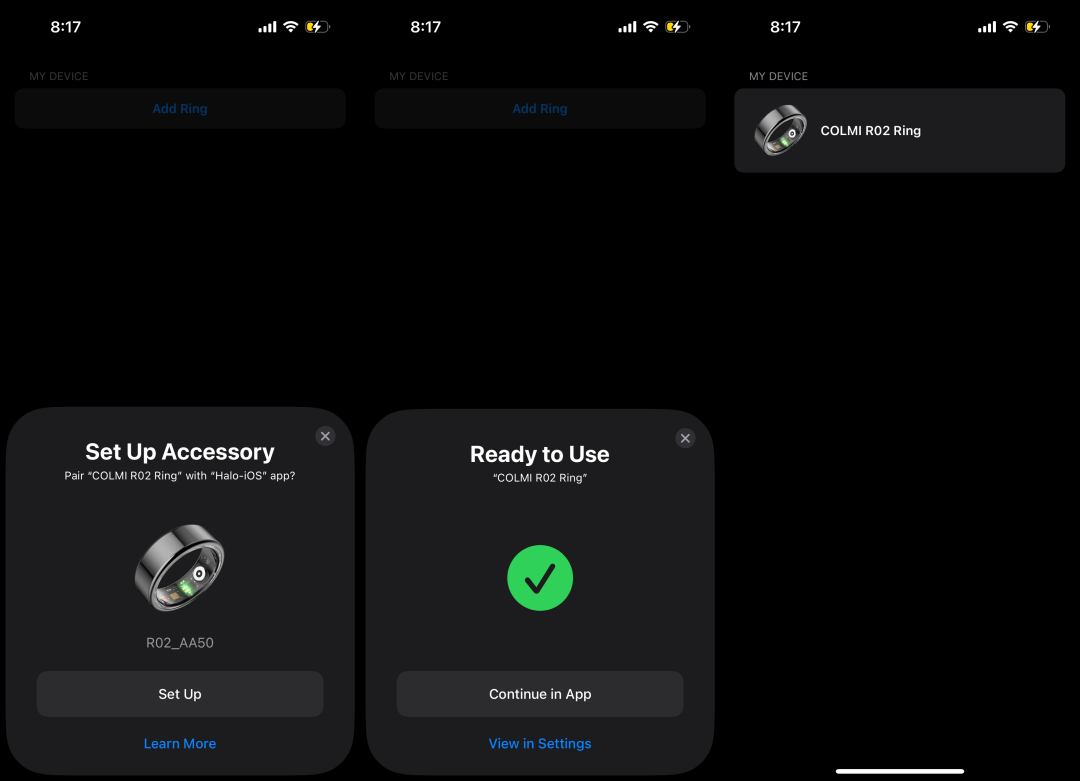
Halo 正式开源: 使用可穿戴设备进行开源健康追踪
在飞速发展的可穿戴技术领域,我们正处于一个十字路口——市场上充斥着各式时尚、功能丰富的设备,声称能够彻底改变我们对健康和健身的方式。 然而,在这些光鲜的外观和营销宣传背后,隐藏着一个令人担忧的现实:大多数这些…...

summernote富文本批量上传音频,视频等附件
普通项目,HTML的summernote富文本批量上传音频,视频等附件(其他附件同理) JS和CSS的引入 <head><th:block th:include"include :: summernote-css" /> </head> <body><th:block th:include"include :: summernote-js" /> …...
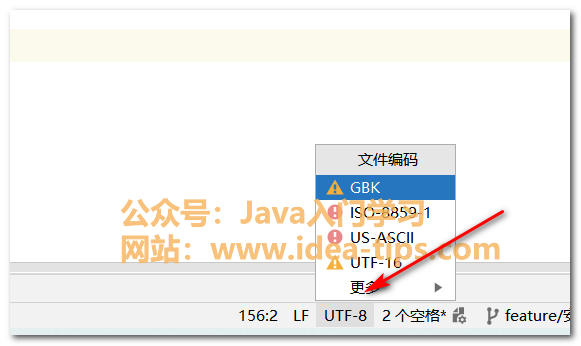
IDEA如何设置编码格式,字符编码,全局编码和项目编码格式
前言 大家好,我是小徐啊。我们在开发Java项目(Springboot)的时候,一般都是会设置好对应的编码格式的。如果设置的不恰当,容易造成乱码的问题,这是要避免的。今天,小徐就来介绍下我们如何在IDEA…...
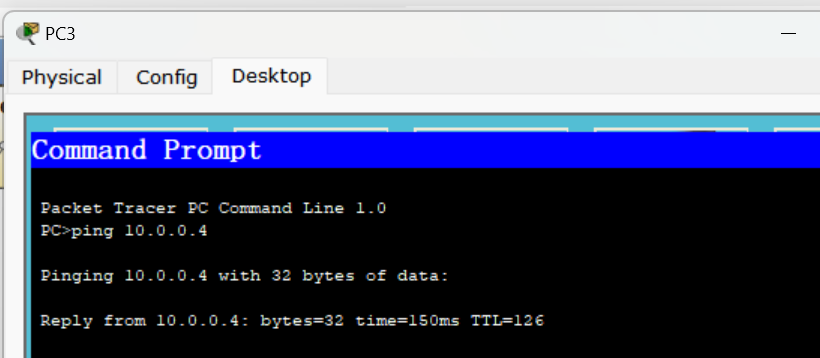
【计算机网络实验】之静态路由配置
【计算机网络实验】之静态路由配置 实验题目实验目的实验任务实验设备实验环境实验步骤路由器配置设置静态路由测试路由器之间的连通性配置主机PC的IP测试 实验题目 静态路由协议的配置 实验目的 熟悉路由器工作原理和机制;巩固静态路由理论;设计简单…...

十五届蓝桥杯赛题-c/c++ 大学b组
握手问题 很简单,相互牵手即可,但是要注意,第一个人只能与其他49个人牵手,所以开头是加上49 #include <iostream> using namespace std; int main() {int cnt0;for(int i49;i>7;i--){cnti;//cout<<i<<&quo…...

基础自动化系统的任务
基础自动化系统的任务主要包括实现自动控制、提高生产效率、减少人工干预等。以下是其具体任务的相关介绍: 实现自动控制 控制机器设备:基础自动化系统通过预设的程序和逻辑规则,对机器或设备进行自动控制和运行。执行特定任务:这…...
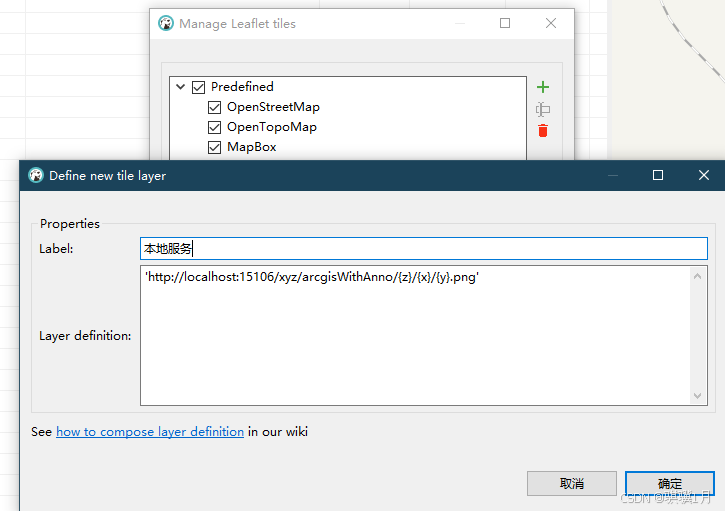
DBeaver添加地图查看器的自定义底图
DBeaver提供了空间数据在地图上查看的功能,地图查看器技术上基于Leaflet实现。 当我们在表格中选择图形列时,空间数据会叠加在右侧的地图查看器上。 其本质是在缓存中会生成一个静态页面,点击查看器左下角的“在浏览器中打开”,可…...

STM32F103C8T6实时时钟RTC
目录 前言 一、RTC基本硬件结构 二、Unix时间戳 2.1 unix时间戳定义 2.2 时间戳与日历日期时间的转换 2.3 指针函数使用注意事项 三、RTC和BKP硬件结构 四、驱动代码解析 前言 STM32F103C8T6外部低速时钟LSE(一般为32.768KHz)用的引脚是PC14和PC…...

为什么你需要英雄联盟Akari助手:3个步骤提升游戏效率的完整指南
为什么你需要英雄联盟Akari助手:3个步骤提升游戏效率的完整指南 【免费下载链接】League-Toolkit An all-in-one toolkit for LeagueClient. Gathering power 🚀. 项目地址: https://gitcode.com/gh_mirrors/le/League-Toolkit 还在为英雄联盟中繁…...

【限时解密】ElevenLabs未公开的瑞典文语料权重配置表:仅限前200名开发者获取的/sv-SE/声道微调参数
更多请点击: https://codechina.net 第一章:瑞典文语音合成的技术背景与ElevenLabs架构定位 瑞典语作为北日耳曼语支的重要语言,拥有丰富的元音系统(9个长元音、9个短元音)、独特的声调重音(accent 1 和 a…...

Adobe GenP 3.0:终极Adobe全家桶破解工具使用指南
Adobe GenP 3.0:终极Adobe全家桶破解工具使用指南 【免费下载链接】Adobe-GenP Adobe CC 2019/2020/2021/2022/2023 GenP Universal Patch 3.0 项目地址: https://gitcode.com/gh_mirrors/ad/Adobe-GenP Adobe Creative Cloud作为专业设计师和创意工作者的核…...

土方车远程监控智慧运维系统方案
某企业聚焦于土方运输领域,拥有大量土方车分布于全国各大工地与矿山之间,承担土石方挖掘、装载、运输等任务。由于车辆分散作业、工作环境恶劣,总部难以实时掌握每台土方车的当前位置、载重状态及电机情况,且车辆故障频发、运维工…...
3个核心功能:用HSTracker将炉石传说数据转化为你的制胜优势
3个核心功能:用HSTracker将炉石传说数据转化为你的制胜优势 【免费下载链接】HSTracker A deck tracker and deck manager for Hearthstone on macOS 项目地址: https://gitcode.com/gh_mirrors/hs/HSTracker 在炉石传说的竞技场上,每一张卡牌的抽…...
)
浙大软院推免机试96分学长复盘:PAT甲级真题怎么刷才有效?(附2021年四道真题思路)
浙大软院推免机试96分备考全攻略:从刷题策略到临场发挥 在计算机专业推免的激烈竞争中,机试成绩往往成为决定成败的关键因素。作为一位在浙大软院推免机试中获得96分的过来人,我深刻理解备考过程中的迷茫与困惑——刷了上百道题却收效甚微&am…...

5步掌握DSEFix:Windows驱动签名的终极解决方案
5步掌握DSEFix:Windows驱动签名的终极解决方案 【免费下载链接】DSEFix Windows x64 Driver Signature Enforcement Overrider 项目地址: https://gitcode.com/gh_mirrors/ds/DSEFix DSEFix是一个专为Windows x64系统设计的驱动签名强制执行覆盖工具…...

UWB硬件堆叠 vs 镜像视界无感原生:新质生产力下的定位革命
UWB硬件堆叠 vs 镜像视界无感原生:新质生产力下的定位革命在数字孪生与空间智能加速落地的当下,全域感知技术正经历一场从“物理外挂”到“数字原生”的底层范式变革。长期以来,以UWB(超宽带)为代表的传统定位方案&…...

PSLab Desktop性能优化:提升仪器响应速度与数据精度的终极指南
PSLab Desktop性能优化:提升仪器响应速度与数据精度的终极指南 【免费下载链接】pslab-desktop PSLab Desktop Application https://pslab.io 项目地址: https://gitcode.com/gh_mirrors/ps/pslab-desktop PSLab Desktop是一款强大的开源硬件实验平台应用程序…...

数据库与仓储
数据库与仓储 位置:Source/DataBases 项目作用H.DataBases.Share数据库共享代码。H.DataBases.SqliteSqlite 支持。H.DataBases.SqlServerSQL Server 支持。 Repository 相关: H.Extensions.DataBase.Repository H.Presenters.Repository H.Controls.…...