手眼标定工具操作文档
1.手眼标定原理介绍
术语介绍
手眼标定:为了获取相机与机器人坐标系之间得位姿转换关系,需要对相机和机器人坐标系进行标定,该标定过程成为手眼标定,用于存储这一组转换关系的文件称为手眼标定文件。
ETH:即Eye To Hand(相机固定架设),指相机(Eye)独立于机器人(Hand),固定在支架上的安装方式。
EIH:即Eye In Hand(相机安装在机械手上),相机(Eye)固定于机器人(Hand)末端上的安装方式。
基坐标系:以机器人安装基座为基准的坐标系,即世界坐标系、法兰坐标系。
手动标定:用户通过示教器或其他PLC等方式移动机器人,到达指定位姿停稳后,通过手动录入或TCP数据通信的方式触发拍照、记录位姿。
自动标定:以软件端主控机器人,按预定规则生成标定路径,并自动移动机器人沿路径采集图像及位姿。根据脚本能力丰富度差异,提供全托管和单任务两种移动控制方式可选。
相机内参:相机内部的基本参数,包括镜头焦距、畸变参数。
相机外参:同一个相机内部多个Sensor的相对位置关系。
1.1 原理简介
目的:获取机器人坐标系与相机坐标系之间的转换关系,将视觉系统下的物体位姿转换成机器人坐标下的位姿。
两种安装方式:

相机安装在机器人以外的固定支架上,标定得到相机到机器人基座坐标系的转换关系。

相机安装在机器人法兰末端(不能是中间某一个关节)跟随机器人运动,标定得到相机到机器人法兰坐标系的转换关系。
2 标定前期准备
2.1 安装要求
2.2 欧拉角类型汇总
2.3 环境架设
3 手眼标定流程介绍
什么情况下需要进行手眼标定?
当完成视觉系统搭建后,需要进行手眼标定。
当出现以下情况时也需要重新进行手眼标定:
*相机相对于机器人基座(相机Eye to Hand 安装方式)或者法兰(相机Eye in Hand 安装方式)发生位置变化;
*更换相机
*更换机器人
3.1 标定工具配置
3.1.1 新建配置文件
3.1.2 选择安装方式
3.1.3 连接相机
3.1.4 连接机器人
3.1.5 确认标定规格
3.2 相机参数检查
3.2.1 成像质量检查
3.2.2 相机内参检查
3.3 添加标定图像及位姿
3.3.1 标定采图操作方式
3.3.2 补充功能介绍——多位姿标定(即多标定板标定)步骤(仅EIH模式下)
3.3.2 补充功能介绍——零位偏移检测
相关文章:
手眼标定工具操作文档
1.手眼标定原理介绍 术语介绍 手眼标定:为了获取相机与机器人坐标系之间得位姿转换关系,需要对相机和机器人坐标系进行标定,该标定过程成为手眼标定,用于存储这一组转换关系的文件称为手眼标定文件。 ETH:即Eye To …...

WebGIS城市停水及影响范围可视化实践
目录 前言 一、相关信息介绍 1、停水信息的来源 2、停水包含的相关信息 二、功能简介 1、基础小区的整理 2、停水计划的管理 三、WebGIS空间可视化 1、使用到的组件 2、停水计划的展示 3、影响小区的展示 4、实际效果 四、总结 前言 城市停水,一个看似…...

无管理员权限 LCU auth-token、port 获取(全网首发 go)
一: 提要: 参考项目: https://github.com/Zzaphkiel/Seraphine 想做一个 lol 查战绩的软件,并且满足自己的需求(把混子和大爹都表示出来),做的第一步就是获取 lcu token ,网上清一色…...
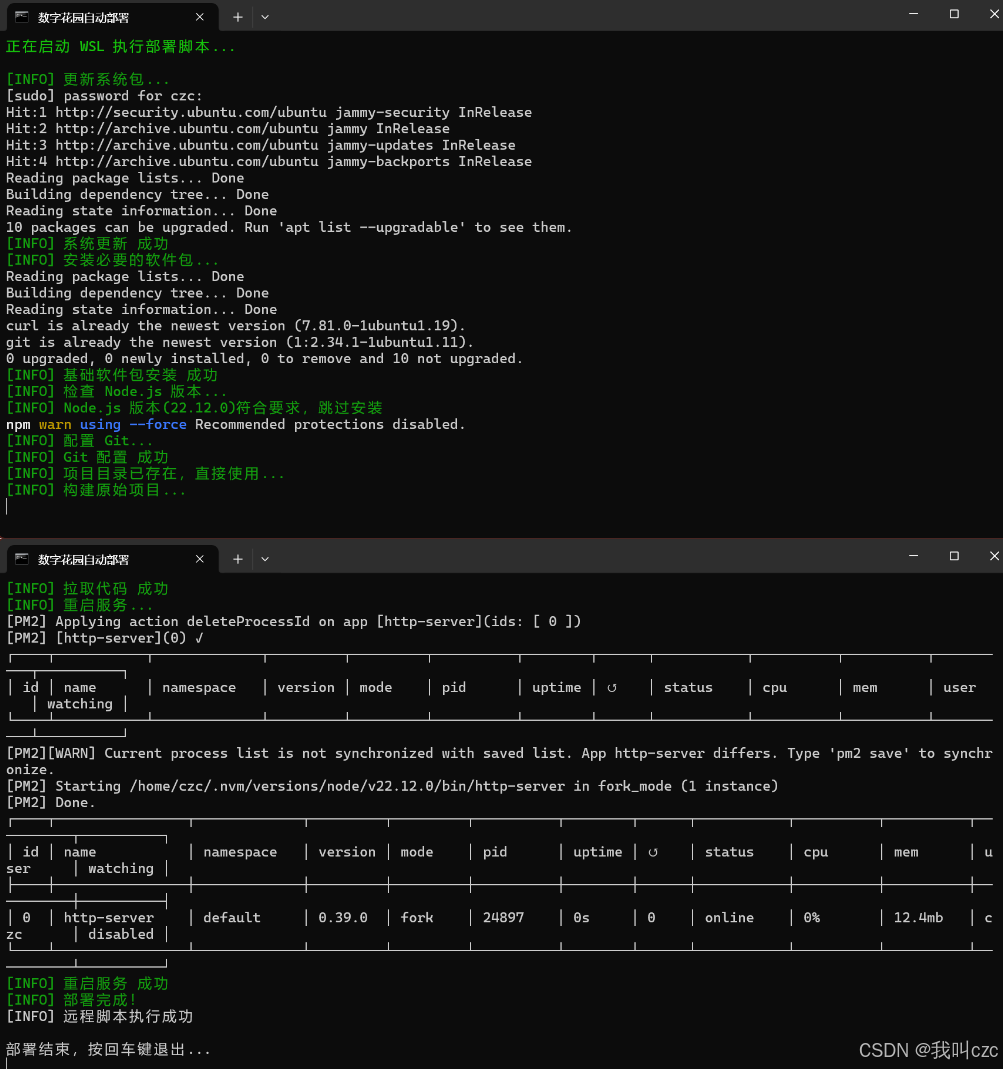
【数字花园】数字花园(个人网站、博客)搭建经历教程
目录 写在最最前面数字花园的定义第一章:netlify免费搭建数字花园相关教程使用的平台步骤信息管理 第二章:本地部署数字花园数字花园网站本地手动部署方案1. 获取网站源码2.2 安装 Node.js 3. 项目部署3.1 安装项目依赖3.2 构建项目3.3 启动http服务器 4…...

python模拟练习第一期
问题一 如果一个数 p 是个质数,同时又是整数 a的约数,则 p 称为 a的一个质因数。 请问 2024 有多少个质因数? 步骤 1: 分解 2024 首先,2024 是偶数,说明可以被 2 整除。我们从 2 开始进行除法分解: 202…...

Xcode
info.plist Appearance Light 关闭黑暗模式 Bundle display name 设置app名称,默认为工程名 Location When In Use Usage Description 定位权限一共有3个key 1.Privacy - Location When In Use Usage Description 2.Privacy - Location Always and When In U…...
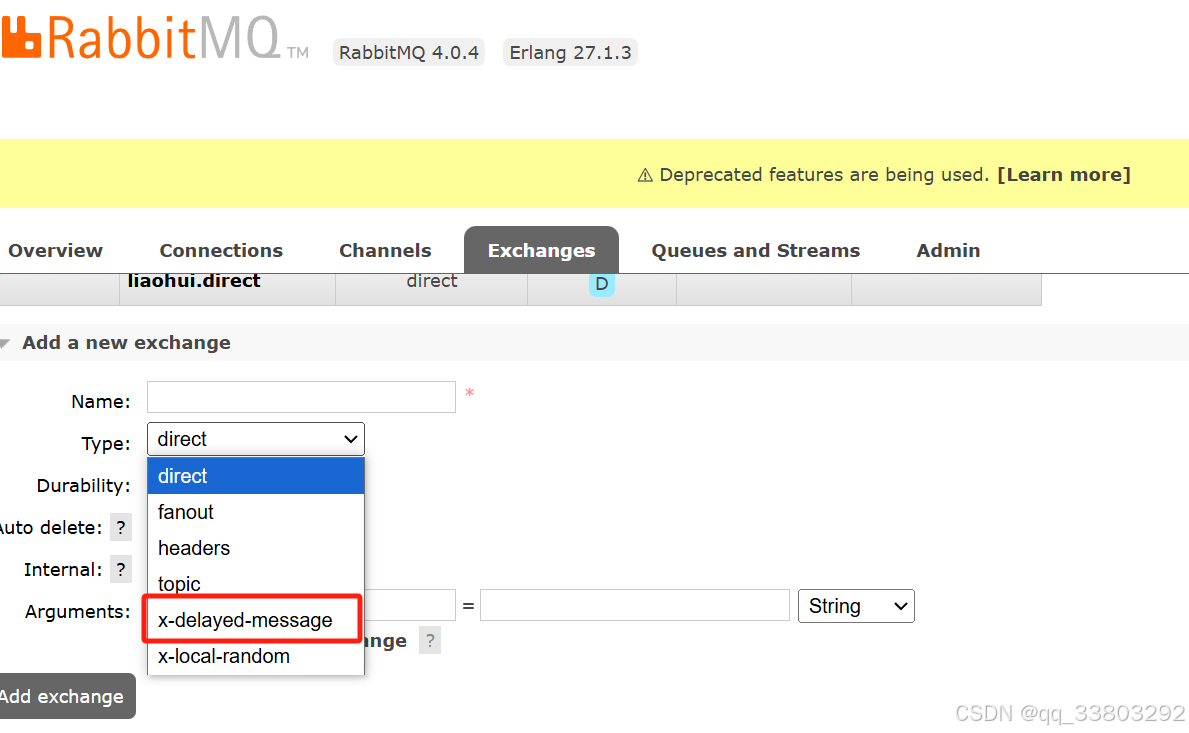
RabbitMQ安装延迟消息插件(mq报错)
之前启动一个springboot的单体项目,一直mq的错误,即便我更新了最新版本的mq,还是报错。 后来才发现,项目使用了延时队列,是需要单独下载延时插件的。 1如果判断mq有没有延时队列插件【没有x-delayed-message】 2下载…...

es 3期 第15节-词项查询与跨度查询实战运用
#### 1.Elasticsearch是数据库,不是普通的Java应用程序,传统数据库需要的硬件资源同样需要,提升性能最有效的就是升级硬件。 #### 2.Elasticsearch是文档型数据库,不是关系型数据库,不具备严格的ACID事务特性ÿ…...

iOS Delegate模式
文章目录 一、 Delegate 模式的概念二、Delegate 的实现步骤步骤 1: 定义一个协议(Protocol)步骤 2: 在主类中添加一个 delegate 属性步骤 3: 实现协议的类遵守协议并实现方法步骤 4: 设置 delegate 三、Delegate 模式的特点四、Delegate 模式的常见场景…...

java-使用druid sqlparser将SQL DDL脚本转化为自定义的java对象
java-使用druid sqlparser将SQL DDL脚本转化为自定义的java对象 一、引言二、环境三、待解析的DDL四、解析后的对象结构五、完整的UT类六、控制台输出总结 一、引言 在日常开发中,有些需要对SQL进行解析的场景,比如读取表结构信息,生成文档、…...
)
React状态管理常见面试题目(一)
1. Redux 如何实现多个组件之间的通信?多个组件使用相同状态时如何进行管理? Redux 实现组件通信 Redux 是一个集中式的状态管理工具,通过共享一个全局 store 来实现多个组件之间的通信。 通信机制: 所有状态保存在 Redux 的全局 store 中。使用 ma…...
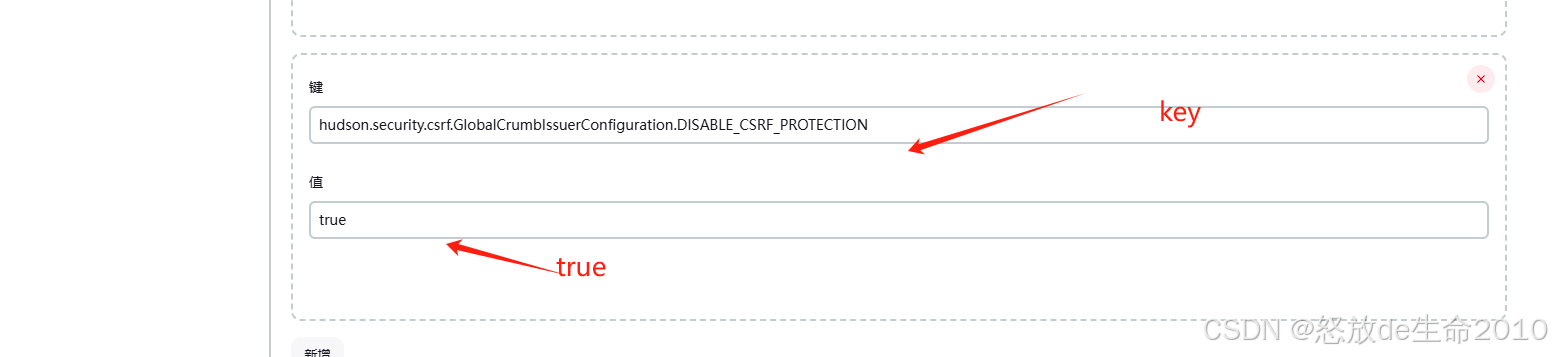
jenkins 出现 Jenkins: 403 No valid crumb was included in the request
文章目录 前言解决方式:1.跨站请求为找保护勾选"代理兼容"2.全局变量或者节点上添加环境变量3.(可选)下载插件 the strict Crumb Issuer plugin4.重启 前言 jenkins运行时间长了,经常出现点了好几次才能构建,然后报了Je…...

【前端面试】list转树、拍平, 指标,
这个题目涉及的是将一组具有父子关系的扁平数据转换为树形结构,通常称为“树形结构的构建”问题。类似的题目包括: 1. 组织架构转换 给定一个公司的员工列表,每个员工有 id 和 managerId,其中 managerId 表示该员工的上级。任务…...

游戏引擎学习第43天
仓库 https://gitee.com/mrxiao_com/2d_game 介绍运动方程 今天我们将更进一步,探索运动方程,了解真实世界中的物理,并调整它们,以创建一种让玩家感觉愉悦的控制体验。这并不是在做一个完美的物理模拟,而是找到最有趣…...

NVM:安装配置使用(详细教程)
文章目录 一、简介二、安装 nvm三、配置 nvm 镜像四、配置环境变量五、使用教程5.1 常用命令5.2 具体案例 六、结语 一、简介 在实际的开发和学习中可能会遇到不同项目的 node 版本不同,而出现的兼容性问题。 而 nvm 就可以很好的解决这个问题,它可以在…...
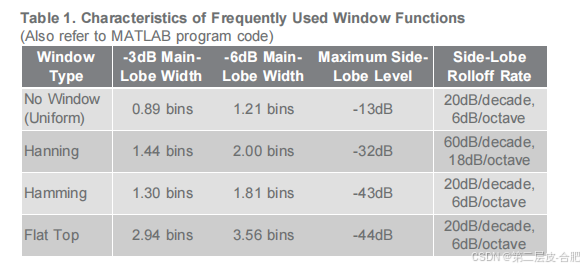
matlab测试ADC动态性能的原理
目录 摘要: 简介: 动态规范和定义 动态规格: 双面到单边的功率谱转换 摘要: 模数转换器(adc)代表了接收器、测试设备和其他电子设备中的模拟世界和数字世界之间的联系。正如本文系列的第1部分中所概述…...

PostgreSQL JSON/JSONB 查询与操作指南
PostgreSQL 提供了强大的 JSON 和 JSONB 数据类型及相关操作,适用于存储和查询半结构化数据。本文将详细介绍其常用操作。 1. 基础操作 1.1 JSON 属性访问 ->: 返回 JSON 对象中的值,结果为 JSON 格式。 SELECT {"a": {"b": 1…...
【Isaac Lab】Ubuntu22.04安装英伟达驱动
目录 1.1 禁用nouveau驱动 1.2 安装必要的依赖项 1.3 下载安装 1.4 查看是否安装成功 1.5 安装CUDA 1.5.1 下载 1.5.2 按照提示进行下载安装 1.5.3 添加环境变量 1.5.4 测试CUDA是否安装成功 1.1 禁用nouveau驱动 输入以下命令打开blacklist.conf文件 sudo vim /etc…...
JS,递归,处理树形数据组件,模糊查询树形结构数据字段
JS递归如何模糊查询树形结构数据,根据数据中的某一个字段值,模糊匹配 直接拿去使用就行 function filterTreeLabel(arr, label) {let result []arr.forEach((item) > {// if (String(item.POBJECT_NAME).toLowerCase().indexOf(label)!-1) {if (String(item.P…...

神州数码DCME-320 online_list.php 任意文件读取漏洞复现
0x01 产品描述: 神州数码DCME-320是一款高性能多业务路由器,专为多用户、多流量和多业务种类需求设计。它采用了...

网盘提速工具终极指南:直链解析技巧与多平台实战方案
网盘提速工具终极指南:直链解析技巧与多平台实战方案 【免费下载链接】Online-disk-direct-link-download-assistant 一个基于 JavaScript 的网盘文件下载地址获取工具。基于【网盘直链下载助手】修改 ,支持 百度网盘 / 阿里云盘 / 中国移动云盘 / 天翼云…...

7个关键步骤!Triton推理服务灾备演练与故障注入测试全指南
7个关键步骤!Triton推理服务灾备演练与故障注入测试全指南 【免费下载链接】server The Triton Inference Server provides an optimized cloud and edge inferencing solution. 项目地址: https://gitcode.com/gh_mirrors/server117/server Triton Inferen…...

CMake: target_include_directories、target_compile_definitions、target_link_libraries 详解
CMake:target_include_directories、target_compile_definitions、target_link_libraries 详解 目录 概述一、PRIVATE / PUBLIC / INTERFACE 作用域二、传递机制与依赖方向(示意)三、target_include_directories四、target_compile_definit…...

cbindgen高级配置指南:自定义类型映射与导出规则详解
cbindgen高级配置指南:自定义类型映射与导出规则详解 【免费下载链接】cbindgen A project for generating C bindings from Rust code 项目地址: https://gitcode.com/gh_mirrors/cb/cbindgen cbindgen 是 Rust 生态系统中最强大的 C/C 绑定生成工具&#x…...

IMU660RA姿态解算实战:从传感器滤波到欧拉角输出的完整实现
1. IMU660RA姿态解算入门指南 刚拿到IMU660RA传感器时,我和大多数工程师一样兴奋又忐忑。这款常用于无人机和智能车的惯性测量单元,能提供关键的姿态数据,但原始数据就像未经打磨的玉石——需要一系列处理才能展现价值。姿态解算的核心目标&a…...

从洗衣机到无人机:SVPWM如何让日常电器中的电机更安静、更省电?
从洗衣机到无人机:SVPWM如何让日常电器中的电机更安静、更省电? 当你享受变频空调带来的舒适温度,或是惊叹于无人机平稳的飞行姿态时,可能不会想到这些体验背后都藏着一个关键技术——空间矢量脉宽调制(SVPWMÿ…...

DeepSeek-OCR-2实战:精准提取合同条款,自动生成结构化法律文书
DeepSeek-OCR-2实战:精准提取合同条款,自动生成结构化法律文书 1. 法律文书处理的痛点与解决方案 法律从业者每天都要处理大量合同、协议、判决书等文书材料。这些文档往往存在以下典型问题: 格式混乱:扫描件倾斜、模糊、双栏排…...

GTE+SeqGPT部署教程:Windows WSL2环境下GTE+SeqGPT全链路运行指南
GTESeqGPT部署教程:Windows WSL2环境下GTESeqGPT全链路运行指南 想自己动手搭建一个能“理解”你问题、还能“回答”你的AI小助手吗?今天,我们就来玩点实在的——在Windows电脑上,通过WSL2(Windows Subsystem for Lin…...

Asian Beauty Z-Image Turbo 学术研究工具链:从MATLAB数据分析到AI图像生成
Asian Beauty Z-Image Turbo 学术研究工具链:从MATLAB数据分析到AI图像生成 1. 引言 如果你做过科研,或者写过技术论文,一定有过这样的经历:辛辛苦苦用MATLAB跑完仿真、画好数据图,到了要写论文插图说明或者画一个漂…...

深夜调车的时候突然发现,Apollo的泊车轨迹优化藏着不少“骚操作“。咱们今天不聊虚的,直接扒开代码看三个核心模块怎么打架...哦不,怎么配合的
apollo 泊车轨迹优化代码 hybridastariaps平滑优化obca平滑优化 第一个图是matlab绘制 后面的图是程序用sdl库绘制先看Hybrid A*这个愣头青。这货生成的轨迹就像刚拿驾照的新手,能避开障碍物但轨迹拧巴得很。看看它扩展节点的代码片段: Node3D* expand(…...