【ROS2】RViz2加载URDF模型文件



相关文章:

【ROS2】RViz2加载URDF模型文件
1、RViz2加载URDF模型文件 1)运行RViz2 rviz22)添加组件:RobotModel 3)选择通过文件添加 4)选择URDF文件,此时会报错,需要修改Fixed Frame为map即可 5)因为没有坐标转换,依然会报错,下面尝试解决 2、运行坐标转换节点 1)运行ROS节点:robot_state_publishe...

Unity导入特效,混合模式无效问题
检查spine导出设置与Unity导入设置是否一致 检查Blend Mode Materials是否勾选 检查是否使用导入时产生的对应混合模式的材质,混合模式不适用默认材质 这里选导入时生成的材质...

el-table自定义按钮控制扩展expand
需求:自定义按钮实现表格扩展内容的展开和收起,实现如下: 将type“expand”的表格列的宽度设置为width"1",让该操作列不展示出来,然后通过ref动态调用组件的内部方法toggleRowExpansion(row, row.expanded)控…...

opencv CV_TM_SQDIFF未定义标识符
opencv CV_TM_SQDIFF未定义标识符 opencv4部分命名发生变换,将CV_WINDOW_AUTOSIZE改为WINDOW_AUTOSIZE;CV_TM_SQDIFF_NORMED改为TM_SQDIFF_NORMED。...

2024acl论文体悟
总结分析归纳 模型架构与训练方法:一些论文关注于改进大语言模型的架构和训练方法,以提高其性能和效率。例如,“Quantized Side Tuning: Fast and Memory-Efficient Tuning of Quantized Large Language Models”提出了一种量化侧调优方法&a…...

【Git原理与使用】版本回退reset 详细介绍、撤销修改、删除文件
目录 一、版本回退 reset 1.1 指令: 1.2 参数说明: 1.3 演示: 二、撤销修改 情况一:对于工作区的代码,还没有 add 情况二:已经 add ,但没有 commit 情况三:已经 add &…...

反规范化带来的数据不一致问题的解决方案
在数据库设计中,规范化(Normalization)和反规范化(Denormalization)是两个相互对立但又不可或缺的概念。规范化旨在消除数据冗余,确保数据的一致性和准确性,但可能会降低查询效率。相反…...
【Android】直接使用binder的transact来代替aidl接口
aidl提供了binder调用的封装,有的时候,比如: 1. 懒得使用aidl生成的接口文件(确实是懒,Android studio中aidl生成接口文件很方便) 2. 服务端的提供者只公开了部分接口出来,只给了调用编号和参…...

Python机器学习笔记(十八、交互特征与多项式特征)
添加原始数据的交互特征(interaction feature)和多项式特征(polynomial feature)可以丰富特征表示,特别是对于线性模型。这种特征工程可以用统计建模和许多实际的机器学习应用中。 上一次学习:线性模型对w…...

《跟我学Spring Boot开发》系列文章索引❤(2025.01.09更新)
章节文章名备注第1节Spring Boot(1)基于Eclipse搭建Spring Boot开发环境环境搭建第2节Spring Boot(2)解决Maven下载依赖缓慢的问题给火车头提提速第3节Spring Boot(3)教你手工搭建Spring Boot项目纯手工玩法…...

【AI进化论】 如何让AI帮我们写一个项目系列:将Mysql生成md文档
一、python脚本 下面给出一个简易 Python 脚本示例,演示如何自动获取所有表的结构,并生成一份 Markdown 文件。你可根据自己的需求做修改或使用其他编程语言。 import mysql.connector# ------------------------ # 1. 连接数据库 # -----------------…...

(已开源-AAAI25) RCTrans:雷达相机融合3D目标检测模型
在雷达相机融合三维目标检测中,雷达点云稀疏、噪声较大,在相机雷达融合过程中提出了很多挑战。为了解决这个问题,我们引入了一种新的基于query的检测方法 Radar-Camera Transformer (RCTrans)。具体来说: 首先设计了一个雷达稠密…...

Elasticsearch:在 HNSW 中提前终止以实现更快的近似 KNN 搜索
作者:来自 Elastic Tommaso Teofili 了解如何使用智能提前终止策略让 HNSW 加快 KNN 搜索速度。 在高维空间中高效地找到最近邻的挑战是向量搜索中最重要的挑战之一,特别是当数据集规模增长时。正如我们之前的博客文章中所讨论的,当数据集规模…...

unittest VS pytest
以下是 unittest 和 pytest 框架的对比表格: 特性unittestpytest设计理念基于类的设计,类似于 Java 的 JUnit更简洁,基于函数式编程设计,支持类和函数两种方式测试编写需要继承 unittest.TestCase 类,方法以 test_ 开…...
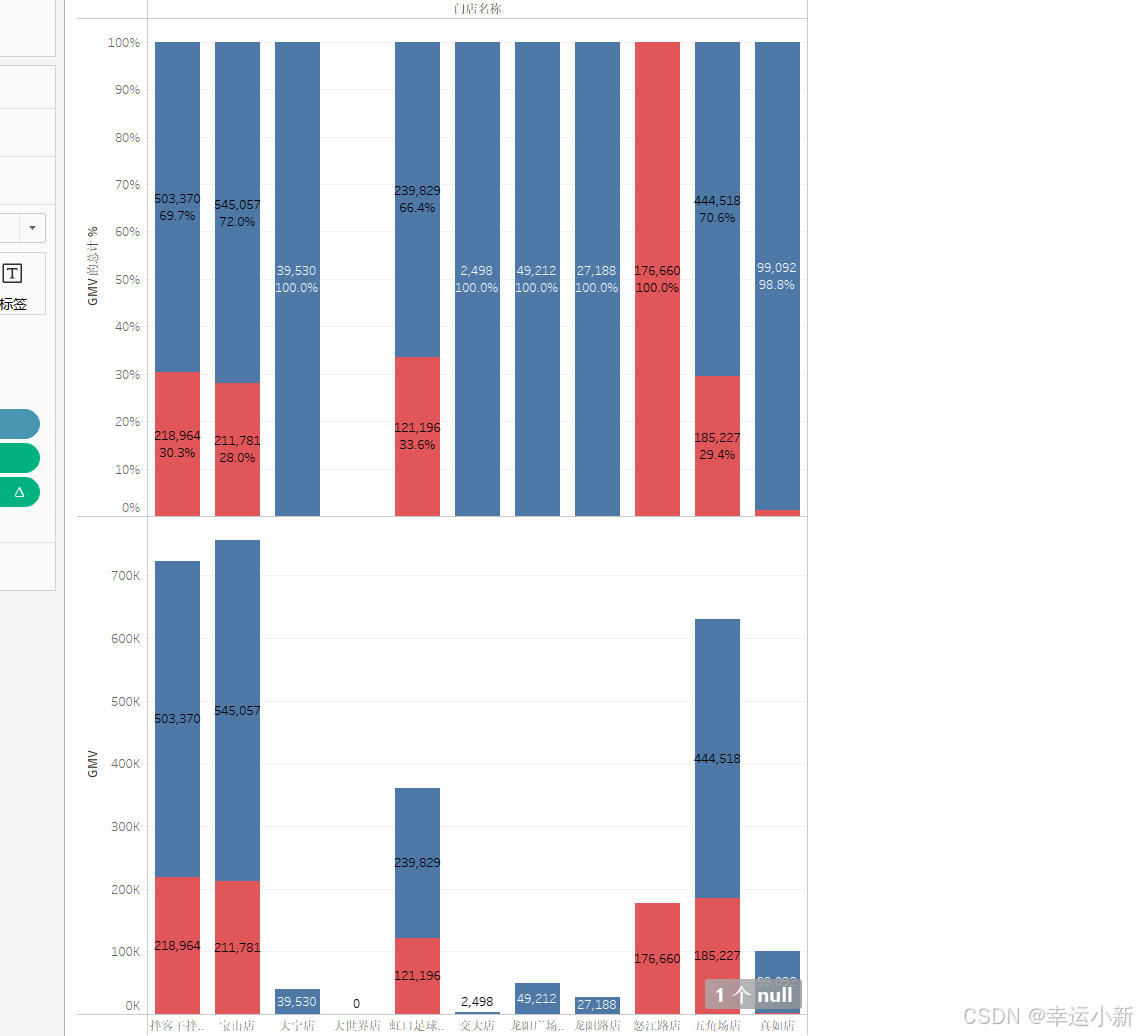
Tableau数据可视化与仪表盘搭建-基础图表制作
目录 对比分析:比大小 柱状图 条形图 数据钻取 筛选器 热力图 气泡图 变化分析:看趋势 折线图 预测 面积图 关系分布:看位置 散点图 直方图 地图 构成分析:看占比 饼图 树地图 堆积图 对比分析:比大…...

Center Loss 和 ArcFace Loss 笔记
一、Center Loss 1. 定义 Center Loss 旨在最小化类内特征的离散程度,通过约束样本特征与其类别中心之间的距离,提高类内特征的聚合性。 2. 公式 对于样本 xi 和其类别yi,Center Loss 的公式为: xi: 当前样本的特征向量&…...

3125: 【入门】求1/1+1/2+2/3+3/5+5/8+8/13+13/21……的前n项的和
文章目录 题目描述输入输出样例输入样例输出 题目描述 求1/11/22/33/55/88/1313/2121/34……的前n项的和。 输入 第1行:一个整数n(1 < n < 30 )。 输出 一行:一个小数,即前n项之和(保留3位小数&…...

如何确保获取的淘宝详情页数据的准确性和时效性?
要确保获取的淘宝详情页数据的准确性和时效性,可从以下几个方面着手: 合法合规获取数据 遵守平台规则:在获取淘宝详情页数据之前,务必仔细阅读并严格遵守淘宝平台的使用协议和相关规定。明确哪些数据可以获取、以何种方式获取以及…...

云计算是如何帮助企业实现高可用性的
想象一下,你正在享受一个悠闲的周末,突然接到同事的电话:公司的核心系统宕机了!这个场景对很多IT从业者来说并不陌生。但在云计算时代,这样的噩梦正在逐渐远去。 一位前辈告诉我:"在技术世界里&#…...

143.《python中使用pymongo》
文章目录 pymongo安装pymongo连接数据库mongodb操作创建数据库判断数据库是否存在创建集合判断集合是否已经存在插入集合插入一条多条插入 查询数据查询一条数据查询所有数据查询指定字段的数据统计查询统计所有记录数按条件统计记录数分页列表查询比较查询$eq$gt$gte$in$lt$lt…...

视频修复终极指南:3步拯救你的损坏视频文件
视频修复终极指南:3步拯救你的损坏视频文件 【免费下载链接】untrunc Restore a damaged (truncated) mp4, m4v, mov, 3gp video. Provided you have a similar not broken video. 项目地址: https://gitcode.com/gh_mirrors/unt/untrunc 你是否曾经遇到过这…...

Kali 系统 Burp Suite 安装教程 零基础轻松上手
目录 安装环境 一、Kali Linux系统信息 编辑 二、安装及配置 1.下载Burp Suite 2.安装 3.配置proxy代理 安装环境 主机:MacBooPro 2021 M1 Pro 系统:Ventura 13.1 虚拟机软件:Parallels Desktop 虚拟机系统:Kali Linux…...

别再死记硬背了!用C++邻接矩阵手搓Dijkstra算法,我连路径打印都给你讲明白了
从零实现Dijkstra算法:邻接矩阵实战与路径回溯详解 在计算机科学的世界里,寻找两点之间最短路径的问题就像现代都市中的导航系统——我们需要在错综复杂的道路网络中找到最优解。Dijkstra算法作为解决单源最短路径问题的经典方法,其重要性不…...

VSCode Log Viewer插件进阶:除了看syslog,还能这样监控你的Nginx/Docker应用日志
VSCode Log Viewer插件进阶:全栈日志监控实战指南 当你同时维护着系统服务、Web服务器和容器化应用时,日志往往散落在不同角落。每次排查问题都要在多个终端窗口间切换,既低效又容易遗漏关键线索。今天我们就来解锁VSCode Log Viewer插件的高…...

ComfyUI Manager插件架构优化:5种高效部署方案与性能调优指南
ComfyUI Manager插件架构优化:5种高效部署方案与性能调优指南 【免费下载链接】ComfyUI-Manager ComfyUI-Manager is an extension designed to enhance the usability of ComfyUI. It offers management functions to install, remove, disable, and enable variou…...

水质在线监测系统嵌入式工控机选型与实战指南
1. 水质在线监测:从传统抽检到智慧物联的必然之路水,是生命之源,也是城市运行的命脉。过去,我们了解水源地的水质状况,主要依赖人工定期采样、送回实验室分析。这种方式周期长、成本高,面对突发性污染事件&…...

告别HAL_Delay!用STM32CubeMX定时器PWM模式优雅驱动ULN2003步进电机
基于STM32CubeMX的PWM硬件驱动ULN2003步进电机全方案 在嵌入式开发中,步进电机控制是一个经典课题。传统方法往往依赖软件延时或基础定时器中断,这不仅消耗宝贵的CPU资源,在多任务场景下还会导致系统响应迟滞。本文将展示如何利用STM32定时器…...

Mac/Win双平台保姆级教程:从零配置ADB环境到连接真机/模拟器
Mac/Win双平台保姆级教程:从零配置ADB环境到连接真机/模拟器 第一次接触Android开发或测试时,配置ADB环境往往是让人头疼的第一步。不同操作系统、不同设备品牌、不同模拟器之间的差异,让很多新手在"adb devices"命令前败下阵来。…...

多功能手持仪设计:从传感器融合到低功耗架构的工程实践
1. 项目概述与核心价值最近几年,我身边不少从事设备维护、户外作业和现场检测的朋友,都在抱怨一个事儿:工具包越来越沉,功能却越来越单一。巡检要带测温枪,查线路要带万用表,记录数据还得掏出手机或平板&am…...

SOCD Cleaner:游戏按键智能优化工具,告别操作冲突的终极方案
SOCD Cleaner:游戏按键智能优化工具,告别操作冲突的终极方案 【免费下载链接】socd Key remapper for epic gamers 项目地址: https://gitcode.com/gh_mirrors/so/socd 在竞技游戏和动作游戏中,精准的操作响应是胜利的关键。然而&…...