Open FPV VTX开源之默认MAVLink设置
Open FPV VTX开源之默认MAVLink设置
- 1. 源由
- 2. 准备
- 3. 连接
- 4. 安装
- 5. 配置
- 6. 测试
- 6.1 启动wfb-ng服务
- 6.2 启动wfb-ng监测
- 6.3 启动QGroundControl
- 6.4 观察测试结果
- 7. 总结
- 8. 参考资料
- 9. 补充
- 9.1 telemetry_tx异常
- 9.2 DEBUG串口部分乱码
- 9.3 PixelPilot软件问题
1. 源由
飞控图传不是简简单单的IPC摄像头。
虽然这个东东就是摄像头改过来的,工作在实时图像(~40ms)。除此之外,还能用于无线电传,用于电传报文的传输,以便地面端了解飞控工作状态。
注:后续应该还会有IMU传感方面的信息集成。
当前,默认OpenIPC是对串口配置的是MAVLink协议。Ardupilot固件在开源无人机方面是做的比较完善的,所以这里用于验证上述功能。
2. 准备
- 选择Ardupilot飞控:笔者这里有一块 Holybro Kakute F7 and KAKUTE F7 AIO。
- 烧录Ardupilot固件
toFC:- pin1: VCC(7.4~26V) ---- FC VBat+- pin2: GND ------------- FC GND- pin3: UART_RX1 -------- FC T1- pin4: UART_TX1 -------- FC R1- pin5: GND ------------- FC GND

3. 连接
略,参考
- 《Open FPV VTX开源之第一次出图》
4. 安装
略, 参考以下资料:
wfb-ng传输层软件安装
- ubuntu22.04@laptop安装&配置wfb-ng
- wfb-ng 开源代码之Jetson Orin安装
QGroundControl编译安装
- QGroundControl@Jetson Orin Nano - 从代码编译安装
- QGroundControl@Jetson Orin Nano - 从代码编译安装 ~ 初心不改!!!
5. 配置
之前有不少这块板子的测试及验证,均使用到配置工具Mission Planner,相关工具的使用方法,请查阅:
【1】ArduPilot飞控之DIY-F450计划
【2】ArduPilot Kakute F7 AIO DIYF450 without GPS配置
【3】ArduPilot Kakute F7 AIO DIYF450 之GPS配置

6. 测试
6.1 启动wfb-ng服务
$ sudo systemctl start wifibroadcast@gs
6.2 启动wfb-ng监测
$ wfb-cli gs
6.3 启动QGroundControl
$ ./build/QGroundControl
6.4 观察测试结果
- MAVLink报文收到,且持续稳定
- QGroundControl(配置UDP14550),飞控会自动 连接上
如果上述情况都正常,证明MAVLink设置及硬件正常,参考视频。

- Video视频报文收到,且持续稳定
进一步确认[《Open FPV VTX开源之第一次出图》](Open FPV VTX开源之第一次出图)正常。
7. 总结
本章主要提供了一个验证Open FPV VTX开源之默认MAVLink设置测试硬件的方法。
实际手头拿到的产品(由于软件或者硬件问题导致)呈现概率性失败:
- OpenIPC S30KQ telemetry_tx exception #396
- OpenIPC S30KQ telemetry_tx exception #1660
大概率是软件稳定性问题,但是也不排除硬件问题。
总的来说,更新固件通常是一个常规办法,但是为了更好的复现和确认,我们本次不做更新验证。
对于开源软件来说,需要一定的DIY方法,如果能够有这方面工程技术定位问题的经验,也请大家多多支持开源社区。
8. 参考资料
【1】Open FPV VTX开源之硬件规格及组成
【2】Open FPV VTX开源之第一次出图
9. 补充
9.1 telemetry_tx异常
telemetry_tx 进程会出现自动退出,进而导致MAVLink地面站软件无法收到报文。
做了如下排列组合,都有概率性失败:
- OpenIPC S30KQ telemetry_tx exception #396
- OpenIPC S30KQ telemetry_tx exception #1660
测试:
- 接有线网口 + 接DEBUG串口 ==> NG;3次
- 接有线网口 + 无DEBUG串口 ==> NG;3次
- 无有线网口 + 无DEBUG串口 ==> NG;3次,成功1次
- 无有线网口 + 接DEBUG串口 ==> NG;3次,成功1次
OpenIPC S30KQ telemetry
9.2 DEBUG串口部分乱码
当有线网口与路由器连接的时候,DEBUG串口会出现部分乱码情况。若网线拔掉,一切正常。

注:正常日志详见:Open FPV VTX开源之第一次出图。
9.3 PixelPilot软件问题
发现PixelPilot软件有的时候,偶尔能够正确解析MAVLink报文,此时pitch、roll等可以正常显示,若反动飞控,值会随之变化。但是大部分情况不行,可能是软件BUG。
相关文章:
Open FPV VTX开源之默认MAVLink设置
Open FPV VTX开源之默认MAVLink设置 1. 源由2. 准备3. 连接4. 安装5. 配置6. 测试6.1 启动wfb-ng服务6.2 启动wfb-ng监测6.3 启动QGroundControl6.4 观察测试结果 7. 总结8. 参考资料9. 补充9.1 telemetry_tx异常9.2 DEBUG串口部分乱码9.3 PixelPilot软件问题 1. 源由 飞控图传…...

【初识扫盲】逆概率加权
我们正在处理一个存在缺失数据的回归模型,并且希望采用一种非参数的逆概率加权方法来调整估计,以应对这种缺失数据的情况。 首先,我们需要明确问题的背景。我们有样本 { ( Y i , X i , r i ) : i 1 , … , n } \left\{\left(Y_i, \boldsym…...

Ubuntu中双击自动运行shell脚本
方法1: 修改文件双击反应 参考: https://blog.csdn.net/miffywm/article/details/103382405 chmod x test.sh鼠标选中待执行文件,在窗口左上角edit菜单中选择preference设计双击执行快捷键,如下图: 方法2: 设置一个应用 参考: https://blo…...

理解AJAX与Axios:异步编程的世界
理解AJAX与Axios:异步编程的世界 在现代Web开发中,异步编程作为一种处理复杂操作的方式,已经成为不可或缺的一部分。AJAX(Asynchronous JavaScript and XML)和Axios是两种实现异步请求的流行技术。本文将深入探讨这两…...

分组通道自注意力G-CSA详解及代码复现
G-CSA定义 G-CSA (Grouped Channel Self-Attention) 是一种创新性的视觉注意力机制,巧妙地结合了卷积和自注意力的优势。通过将输入特征图划分为多个独立的通道组,在每个组内执行自注意力操作,G-CSA实现了高效的全局信息交互,同时保留了局部特征细节。这种方法不仅提高了模…...

汽车基础软件AutoSAR自学攻略(四)-AutoSAR CP分层架构(3) (万字长文-配21张彩图)
汽车基础软件AutoSAR自学攻略(四)-AutoSAR CP分层架构(3) (万字长文-配21张彩图) 前面的两篇博文简述了AutoSAR CP分层架构的概念,下面我们来具体到每一层的具体内容进行讲解,每一层的每一个功能块力求用一个总览图,外加一个例子的图给大家进…...

玩转大语言模型——langchain调用ollama视觉多模态语言模型
系列文章目录 玩转大语言模型——ollama导入huggingface下载的模型 玩转大语言模型——langchain调用ollama视觉多模态语言模型 langchain调用ollama视觉多模态语言模型 系列文章目录前言使用Ollama下载模型查找模型下载模型 测试模型ollama测试langchain测试加载图片加载模型…...

Github 2025-01-11 Rust开源项目日报 Top10
根据Github Trendings的统计,今日(2025-01-11统计)共有10个项目上榜。根据开发语言中项目的数量,汇总情况如下: 开发语言项目数量Rust项目10C项目1Swift项目1Yazi - 快速终端文件管理器 创建周期:210 天开发语言:Rust协议类型:MIT LicenseStar数量:5668 个Fork数量:122…...

【学习】【记录】【分享】微型响应系统
前言 本篇博客源于对Vue和React框架中响应式系统的好奇与探索。若文中存在任何错误或有更优的解决方案,欢迎各位读者不吝指正,让我们一起学习,共同进步。 1. 什么是响应式系统 响应式系统是一种编程范式,它允许数据的变化自动地…...

vue城市道路交通流量预测可视化系统
文章结尾部分有CSDN官方提供的学长 联系方式名片 文章结尾部分有CSDN官方提供的学长 联系方式名片 关注B站、收藏、不迷路! 项目亮点 编号:R09 🚇 网站大屏管理三大前端、vuespringbootmysql、前后端分离架构 🚇 流量预测道路查询…...

Windows7 Emacs设置及中文乱码解决
个人博客地址:Windows7 Emacs设置及中文乱码解决 | 一张假钞的真实世界 环境说明 Windows7GNU Emacs 25.1.1安装路径:D:/apps/emacs/ 配置Emacs 在Windows7下安装完Emacs后,默认情况下Emacs不会在一启动的时候就生成.emacs配置文件和.ema…...
高级算法C5.0决策树算法介绍)
Python AI教程之十五:监督学习之决策树(6)高级算法C5.0决策树算法介绍
C5.0决策树算法 C5 算法由 J. Ross Quinlan 创建,是 ID3 决策树方法的扩展。它通过根据信息增益(衡量通过按特定属性进行划分而实现的熵减少量)递归地划分数据来构建决策树。 对于分类问题,C5.0 方法是一种决策树算法。它构建规则集或决策树,这是对 C4.5 方法的改进。根…...
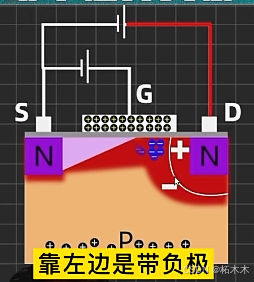
MOS管为什么会有夹断,夹断后为什么会有电流?该电流为什么是恒定的?
以下是对MOS管MOS管为什么会有夹断,夹断后为什么还会有电流?该电流为什么是恒定的?的一些心得体会。 1. MOS管为什么会有夹断? 可以认为D极加压使得D极的耗尽层增大(原因是N极接正极,P极接负极,电子被吸引…...
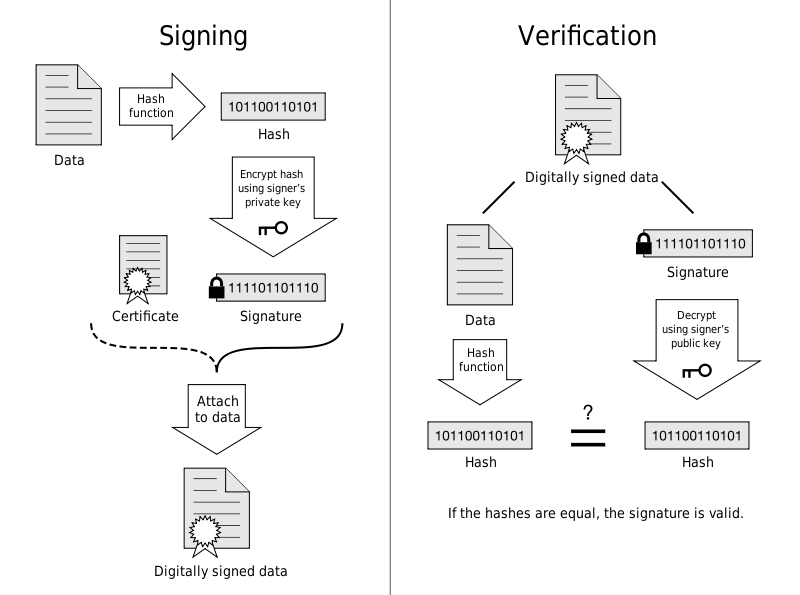
网络安全-RSA非对称加密算法、数字签名
数字签名非常普遍: 了解数字签名前先了解一下SHA-1摘要,RSA非对称加密算法。然后再了解数字签名。 SHA-1 SHA-1(secure hash Algorithm )是一种 数据加密算法。该算法的思想是接收一段明文,然后以一种不可逆的方式将…...

【AI日记】25.01.13
【AI论文解读】【AI知识点】【AI小项目】【AI战略思考】【AI日记】【读书与思考】 AI kaggle 比赛:Forecasting Sticker Sales 读书 书名:罗素论幸福 律己 AI: 8 小时,良作息:1:00-9:00, 良短视频&…...

Mysql--运维篇--空间管理(表空间,索引空间,临时表空间,二进制日志,数据归档等)
MySQL的空间管理是指对数据库存储资源的管理和优化。确保数据库能够高效地使用磁盘空间、内存和其他系统资源。良好的空间管理不仅有助于提高数据库的性能,还能减少存储成本并防止因磁盘空间不足导致的服务中断。MySQL的空间管理涉及多个方面,包括表空间…...

JVM面试相关
JVM组成 什么是程序计数器 详细介绍Java堆 什么是虚拟机栈 能不能解释一下方法区? 直接内存相关 类加载器 什么是类加载器,类加载器有哪些 什么是双亲委派模型 类加载过程 垃圾回收 对象什么时候可以被垃圾回收器回收 JVM垃圾回收算法有那些 JVM的分代…...

【leetcode 13】哈希表 242.有效的字母异位词
原题链接 题解链接 一般哈希表都是用来快速判断一个元素是否出现集合里。 当我们想使用哈希法来解决问题的时候,我们一般会选择如下三种数据结构。 数组 set (集合) map(映射) 如果在做面试题目的时候遇到需要判断一个元素是否出现过的场景…...

Blazor开发复杂信息管理系统的优势
随着现代企业信息管理需求的不断提升,开发高效、易维护、可扩展的系统变得尤为重要。在这个过程中,Blazor作为一种新兴的Web开发框架,因其独特的优势,逐渐成为开发复杂信息管理系统的首选技术之一。本文将结合Blazor在开发复杂信息…...

ue5 1.平A,两段连击蒙太奇。鼠标点一下,就放2段动画。2,动画混合即融合,边跑边挥剑,3,动画通知,动画到某一帧,把控制权交给蓝图。就执行蓝图节点
新建文件夹 创建一个蒙太奇MA_Melee 找到c_slow 调节一下速度 把D_slow拖上去 中间加一个片段 哎呀呀,写错了,我想写2 把这个标记拖过来,点击默认default 弄第二个片段 就会自己变成这个样子 把2这个标记拖到中间 鼠标左键&a…...

Python 3.7 + XGBoost 多分类实战:从数据清洗到SHAP模型解释的保姆级教程
Python 3.7 XGBoost 多分类实战:从数据清洗到SHAP模型解释的保姆级教程在机器学习领域,XGBoost因其出色的性能和可解释性成为众多数据科学家的首选工具。本文将带您完整走过多分类任务的全流程,从原始数据到可解释的预测模型,每个…...

组态王通用扫码枪配置
使用组态王扫码枪驱动,是绑定变量,扫码后直接就可以显示扫码内容。解决每次扫码输入数据时必须先用鼠标点进输入框内的问题。驱动安装先添加驱动,亚控网站的文件为 barcodescanner,这个文件是组态王通用扫码枪的驱动,但…...

转行网络安全运维:从0到1的可落地指南
转行网络安全运维:从0到1的可落地指南 一、 「3个核心技能:从零起步也能会」 网上学习资料多到爆炸,不用纠结“哪个最好”,记住一句话:**能学会、能上手的就是好的**!不管是免费视频还是付费课,…...

Owl-Alpha 新手快速上手指南
在处理大规模数据或构建高性能应用时,我们常常会遇到一个棘手的问题:如何在不阻塞主线程的情况下,高效地执行耗时任务?无论是处理图像、解析大型文件,还是进行复杂的数学运算,传统的单线程模式往往会让界面…...
_kaic)
ssm207基于SSM的视频播放系统的设计与实现+vue(文档+源码)_kaic
第五章 系统的实现5.1 用户功能模块的实现5.1.1系统主界面用户进入本系统可查看系统信息,系统主界面展示如图5.1所示。图5.1网站主界面5.1.2视频详情界面用户可选择视频查看视频详情信息,并可进行视频播放操作,视频详情界面展示如图5.2所示。…...

2027考研全套资料免费分享
备战27考研最全备考资料整理完毕,一路走来深知备考搜集资料耗费大量时间,浪费不少精力。特意整理2027考研全科完整版资源,全部打包汇总,零基础考生直接拿来就能使用,省去四处搜集资料的烦恼。资料内含:&…...

解密高校教师必会的Gemini 3.1 Pro五大科研隐藏技能:从论文评估到创新点锁定
各位同仁好,我是七哥。一个在高校里从事人工智能相关领域研究,钻研用大模型AI实操的学术人。可以和七哥交流学术写作或Gemini、GPT、Claude等大模型学术实操相关问题,多多交流,相互成就,共同进步。 科研路上,有人发完顶刊顺利晋升,有人还在为创新点抓耳挠腮。 大多数教…...

深度解析HS2-HF Patch:从技术框架到创作工具链的完整升级方案
深度解析HS2-HF Patch:从技术框架到创作工具链的完整升级方案 【免费下载链接】HS2-HF_Patch Automatically translate, uncensor and update HoneySelect2! 项目地址: https://gitcode.com/gh_mirrors/hs/HS2-HF_Patch 你是否曾因Honey Select 2的原版体验受…...

HarmonyOS 6学习:解决图片放大后无法移动至边缘的matrix4矩阵变换技巧
从"卡在中间"到"自由拖拽":一次完整的图片缩放平移边界问题攻关在HarmonyOS 6应用开发中,我最近遇到了一个看似简单却让人头疼的图片查看器问题:用户双指放大图片后,想要拖动查看边缘细节,却发现图…...
P2P聊天程序)
基于C#实现(WinForm)P2P聊天程序
♻️ 资源 大小: 29.8MB ➡️ 资源下载:https://download.csdn.net/download/s1t16/87430269 p2p聊天程序 一、功能介绍 1.1 登录 用户凭用户名和密码登录系统,可以更换服务器 IP 和端口,以防网络不畅通,连接服务…...