Jetson nano 安装 PCL 指南
本指南帮助 ARM64 架构的 Jetson Nano 安装 PCL(点云库)。
安装步骤
第一步:安装依赖
在终端中运行以下命令,安装 PCL 所需的依赖:
sudo apt-get update sudo apt-get install git build-essential linux-libc-dev sudo apt-get install cmake cmake-gui sudo apt-get install libusb-1.0-0-dev libusb-dev libudev-dev sudo apt-get install mpi-default-dev openmpi-bin openmpi-common sudo apt-get install libpcap-dev sudo apt-get install libflann1.9 libflann-dev sudo apt-get install libeigen3-dev sudo apt-get install libboost-all-dev sudo apt-get install vtk6 libvtk6.3 libvtk6-dev libvtk6.3-qt libvtk6-qt-dev sudo apt-get install libqhull-dev libgtest-dev sudo apt-get install freeglut3-dev pkg-config sudo apt-get install libxmu-dev libxi-dev sudo apt-get install mono-complete sudo apt-get install libopenni-dev libopenni2-dev sudo apt install build-essential libssl-dev
第二步:安装Eigen库
先卸载Eigen库
sudo updatedb locate eigen3 sudo rm -rf /usr/include/eigen3 /usr/lib/cmake/eigen3 /usr/share/doc/libeigen3- dev /usr/share/pkgconfig/eigen3.pc /var/lib/dpkg/info/libeigen3-dev.list /var/lib/dpkg/info/libeigen3-dev.md5sums
安装:
wget https://gitlab.com/libeigen/eigen/-/archive/3.3.7/eigen-3.3.7.tar.gz sudo tar -xvf eigen-3.3.7.tar.gz cd eigen-3.3.7 mkdir build && cd build sudo cmake .. sudo make install sudo cp -r /usr/local/include/eigen3/Eigen /usr/local/include
第三步:下载 PCL 源码
在终端中运行以下命令,下载 PCL 源码:
git clone https://github.com/PointCloudLibrary/pcl.git
第四步:编译 PCL 源码
进入 PCL 源码目录,先切换到1.9.1版本:
cd pcl git checkout pcl-1.9.1
创建build文件夹:
mkdir build && cd build
开始编译:
cmake -DCMAKE_BUILD_TYPE=None \ -DCMAKE_INSTALL_PREFIX=/usr/local \ -DBUILD_GPU=ON \ -DBUILD_CUDA=ON \ -DBUILD_apps=ON \ -DBUILD_examples=ON ..
make
编译过程可能需要较长时间,请耐心等待。
Jetson Nano 编译 PCL 真的很慢。
过程中可能遇到一些错误,解决方法见报错解决 。
第五步:安装 PCL
sudo make install
第六步:测试 PCL 安装是否成功
在终端中运行以下命令,测试 PCL 是否安装成功:
cd ../test ./all_tests
如果所有测试都通过,说明 PCL 安装成功。
报错解决
internal compiler error: Segmentation fault (program cc1plus)

此错误是 stack size 太小导致的。
使用ulimit -a查看系统的限制参数。

解决方法:增加 stack size 的大小即可。
ulimit -s 102400
namespace “thrust” has no member “device_malloc”
完蛋,报错图片没保存 :( 大家自行脑补。
此错误是point_cloud.h文件缺少头文件导致的。
解决方法:找到namespace “thrust” has no member “device_malloc”这句话前面的文件,使用vi或vim打开编辑,在顶部添加一句#include <thrust/device_malloc.h>即可。
Pax assembly aborted due to errors

此错误是由于PTX ISA版本6.4不支持sm_70及更高版本的目标。需要将CUDA_ARCH_BIN cmake变量限制为低于7.0的架构。
vim ../CMakeList.txt
添加上set(CUDA_ARCH_BIN "6.1")即可。

相关文章:
Jetson nano 安装 PCL 指南
本指南帮助 ARM64 架构的 Jetson Nano 安装 PCL(点云库)。 安装步骤 第一步:安装依赖 在终端中运行以下命令,安装 PCL 所需的依赖: sudo apt-get update sudo apt-get install git build-essential linux-libc-dev s…...

go-zero框架基本配置和错误码封装
文章目录 加载配置信息配置 env加载.env文件配置servicecontext 查询数据生成model文件执行查询操作 错误码封装配置拦截器错误码封装 接上一篇:《go-zero框架快速入门》 加载配置信息 配置 env 在项目根目录下新增 .env 文件,可以配置当前读取哪个环…...
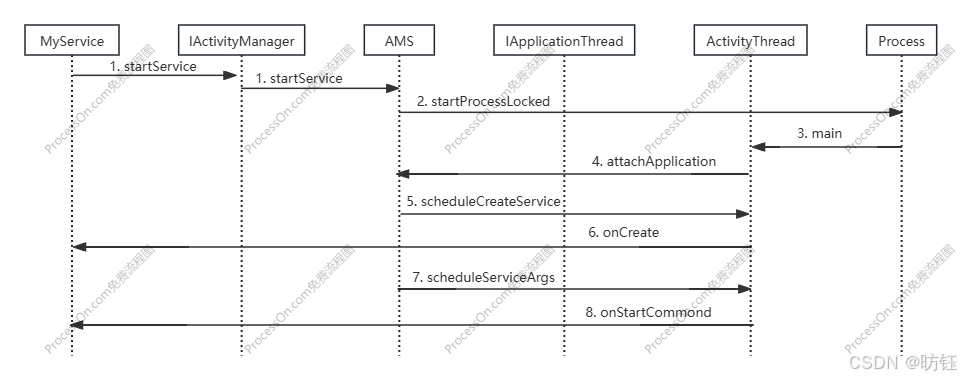
Android中Service在新进程中的启动流程2
目录 1、Service在客户端的启动入口 2、Service启动在AMS的处理 3、Service在新进程中的启动 4、Service与AMS的关系再续 上一篇文章中我们了解了Service在新进程中启动的大致流程,同时认识了与客户端进程交互的接口IApplicationThread以及与AMS交互的接口IActi…...
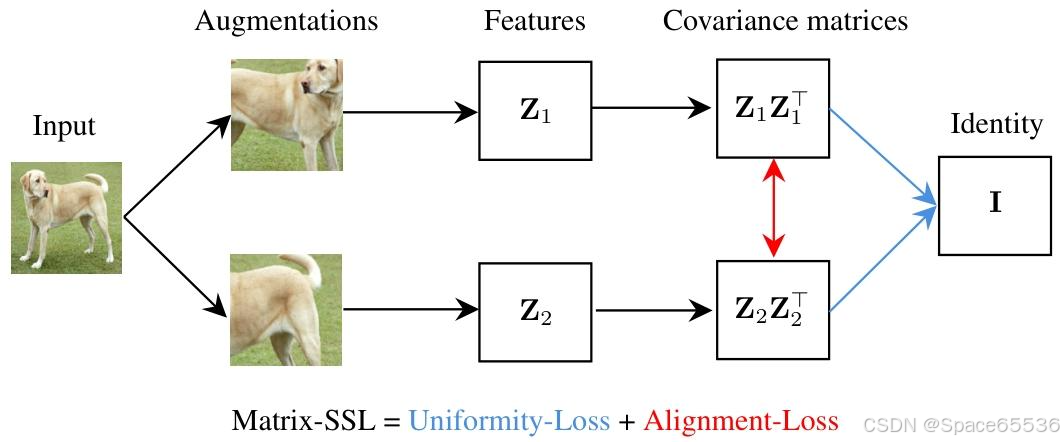
论文速读|Matrix-SSL:Matrix Information Theory for Self-Supervised Learning.ICML24
论文地址:Matrix Information Theory for Self-Supervised Learning 代码地址:https://github.com/yifanzhang-pro/matrix-ssl bib引用: article{zhang2023matrix,title{Matrix Information Theory for Self-Supervised Learning},author{Zh…...
)
ubunut22.04安装docker(基于阿里云 Docker 镜像源安装 Docker)
安装 更新包管理器: sudo apt update 安装 Docker 的依赖包 sudo apt install apt-transport-https ca-certificates curl gnupg lsb-release添加阿里云 Docker 镜像源 GPG 密钥: curl -fsSL https://mirrors.aliyun.com/docker-ce/linux/ubuntu/gp…...

k8s namespace绑定节点
k8s namespace绑定节点 1. apiserver 启用准入控制 PodNodeSelector2. namespace 添加注解 scheduler.alpha.kubernetes.io/node-selector3. label node 1. apiserver 启用准入控制 PodNodeSelector vim /etc/kubernetes/manifests/kube-apiserver.yaml spec:containers:- co…...

【ElementPlus】在Vue3中实现表格组件封装
预览 搜索筛选组件 <template><div><el-formref"formView":model"formData"label-width"auto"label-position"right":label-col-style"{ min-width: 100px }":inline"true"><el-form-item …...
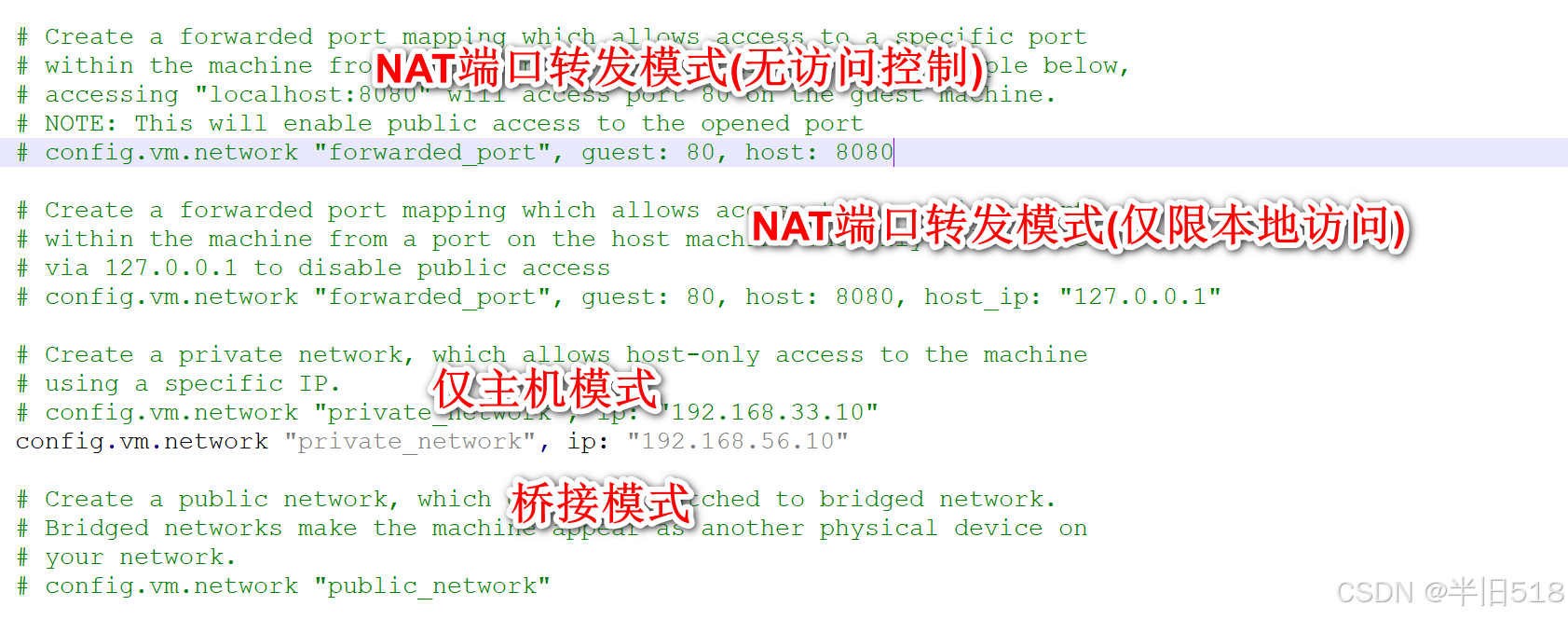
cursor重构谷粒商城04——vagrant技术快速部署虚拟机
前言:这个系列将使用最前沿的cursor作为辅助编程工具,来快速开发一些基础的编程项目。目的是为了在真实项目中,帮助初级程序员快速进阶,以最快的速度,效率,快速进阶到中高阶程序员。 本项目将基于谷粒商城…...
26、正则表达式
目录 一. 匹配字符 .:匹配除换行符外的任意单个字符。 二. 位置锚点 ^:匹配输入字符串的开始位置。 $:匹配输入字符串的结束位置。 \b:匹配单词边界。 \B:匹配非单词边界。 三. 重复限定符 *:匹配…...

SpringBoot使用MockMVC通过http请求controller控制器调用测试
说明 在Spring Boot中编写测试控制器调用是一个常见的需求,通常使用Spring的测试框架来完成。Spring Boot提供了多种方式来测试控制器,包括使用MockMvc进行模拟HTTP请求和响应的测试。 基本示例 1. 创建Spring Boot项目 首先,确保你已经创建了一个Spring Boot项目。如果…...
【Unity3D】Unity混淆工具Obfuscator使用
目录 一、导入工具 二、各种混淆形式介绍 2.1 程序集混淆 2.2 命名空间混淆 2.3 类混淆 2.4 函数混淆 2.5 参数混淆 2.6 字段混淆 2.7 属性混淆 2.8 事件混淆 三、安全混淆 四、兼容性处理 4.1 动画方法兼容 4.2 GUI方法兼容 4.3 协程方法兼容 五、选项 5.1 调…...
)
C语言语法基础学习—动态分配空间(new和malloc的用法及区别)
前言 在 C 语言中,动态内存分配主要是通过 malloc() 和 free() 函数来完成的。而在 C 中是使用new和delete关键字,来动态分配内存。 虽然 C 语言没有 new,但 malloc() 和 new 在内存分配上的作用是相似的。下面我们详细解释 malloc() 和 ne…...
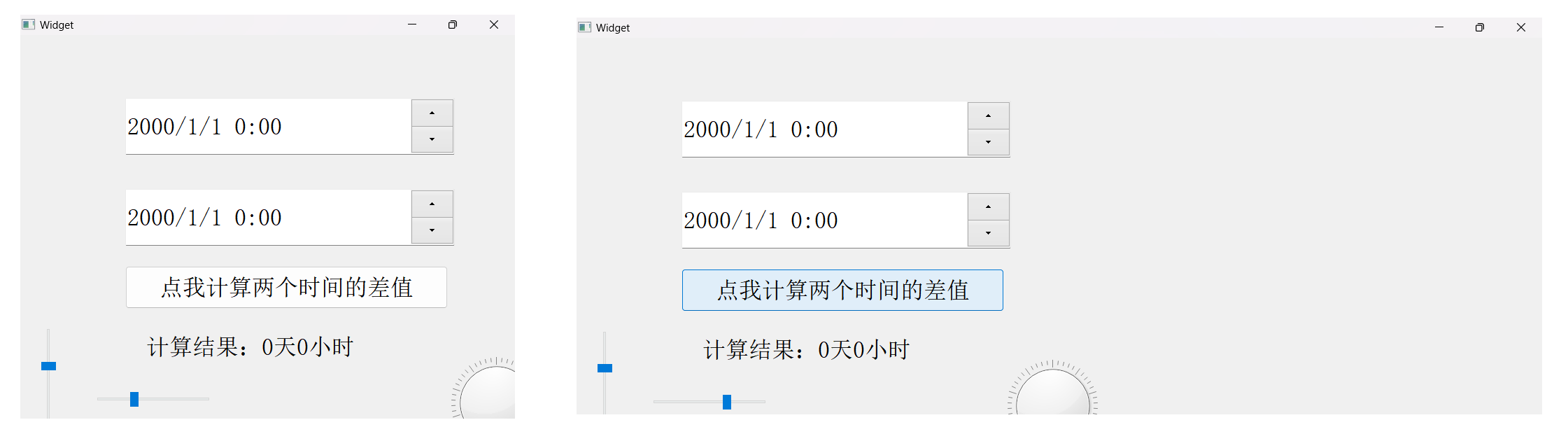
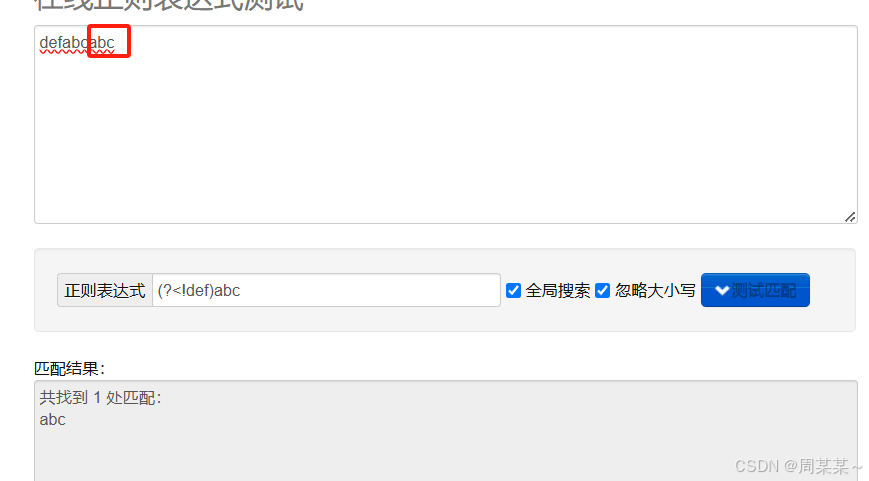
QT:控件属性及常用控件(3)-----输入类控件(正则表达式)
输入类控件既可以进行显示,也能让用户输入一些内容! 文章目录 1.Line Edit1.1 用户输入个人信息1.2 基于正则表达式的文本限制1.3 验证两次输入的密码是否一致1.4 让输入的密码可以被查看 2.Text Edit2.1 输入和显示同步2.1 其他信号出发情况 3.ComboBox…...

Hive SQL 执行计划解析
Hive SQL 执行计划解析 一、 explain用法 1. SQL 查询 EXPLAIN SELECT SUM(view_dsp) AS view_sum FROM ads.table_a WHERE p_day 2025-01-06;2. 执行计划 STAGE DEPENDENCIES:Stage-1 is a root stageStage-0 depends on stages: Stage-1STAGE PLANS:Stage: Stage-1Map …...
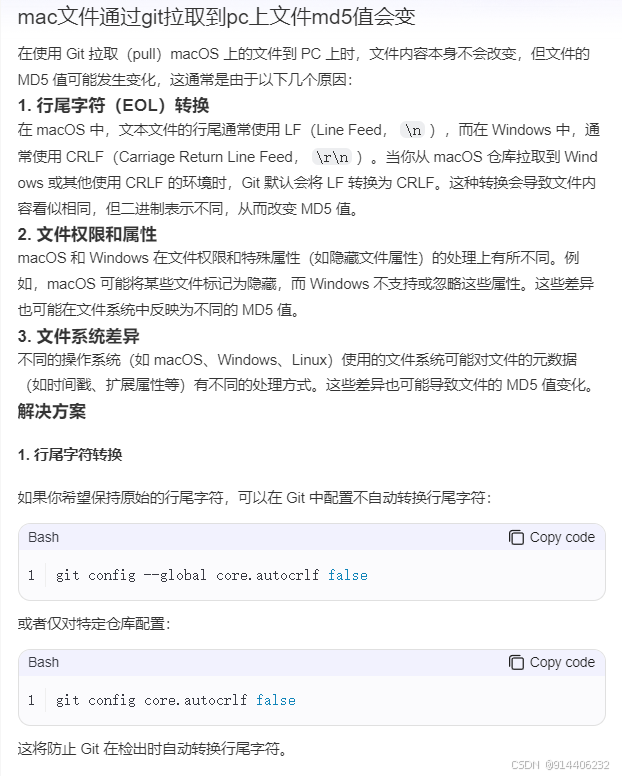
热更新杂乱记
热更新主要有一个文件的MD5值的比对过程,期间遇到2个问题,解决起来花费了一点时间 1. png 和 plist 生成zip的时候再生成MD5值会发生变动。 这个问题解决起来有2种方案: (1).第一个方案是将 png和plist的文件时间改…...
博客搭建 — GitHub Pages 部署
关于 GitHub Pages GitHub Pages 是一项静态站点托管服务,它直接从 GitHub 上的仓库获取 HTML、CSS 和 JavaScript 文件,通过构建过程运行文件,然后发布网站。 本文最终效果是搭建出一个域名为 https://<user>.github.io 的网站 创建…...
翻译:How do I reset my FPGA?
文章目录 背景翻译:How do I reset my FPGA?1、Understanding the flip-flop reset behavior2、Reset methodology3、Use appropriate resets to maximize utilization4、Many options5、About the author 背景 在写博客《复位信号的同步与释放(同步复…...

Linux 进程环境变量:深入理解与实践指南
🌟 快来参与讨论💬,点赞👍、收藏⭐、分享📤,共创活力社区。🌟 🚩用通俗易懂且不失专业性的文字,讲解计算机领域那些看似枯燥的知识点🚩 在 Linux 系统里…...
Linux探秘坊-------5.git
1.git介绍 1.版本控制器 为了能够更⽅便我们管理这些不同版本的⽂件,便有了版本控制器。所谓的版本控制器,就是能让你了解到⼀个⽂件的历史,以及它的发展过程的系统。通俗的讲就是⼀个可以记录⼯程的每⼀次改动和版本迭代的⼀个管理系统&am…...

Linux中的几个基本指令(二)
文章目录 1、cp指令例一:例二:例三:例四:例五: 2、mv 指令例一:例二: 3、cat指令例一: 4、tac指令5、which指令6、date指令时间戳:7、zip指令 今天我们继续学习Linux下的…...

AI智能体架构设计:从成本黑洞到价值引擎的解耦之道
1. 从成本黑洞到价值引擎:为什么你的AI智能体架构正在吞噬预算又到了季度技术复盘会,财务那边递过来的云账单和工程人力成本,是不是又让你倒吸一口凉气?你看着报表上那个名为“AI智能体平台”的项目,它的资源消耗曲线几…...

从分立逻辑到单片机:基于ATmega8的MIDI通道分析仪设计与实现
1. 项目概述:从分立逻辑到单片机的MIDI通道分析仪进化史二十年前,当我在《Elektor》杂志上发表第一版MIDI通道分析仪时,整个数字音乐世界还处于一个相当“硬核”的阶段。那个版本的设计,用今天的话来说,简直就是一场“…...

Wechat2RSS:微信公众号转RSS订阅工具
文章目录Wechat2RSS:微信公众号转RSS订阅工具Wechat2RSS:微信公众号转RSS订阅工具 ttttmr开源的Wechat2RSS项目,目前在GitHub上获得1409颗Star,项目地址为https://github.com/ttttmr/Wechat2RSS。该工具的核心作用是将微信公众号…...

鸿蒙系统微博应用锁常见问题解答
为微博设置应用锁后,不少用户会有各种疑问:忘记密码怎么办?会不会影响消息推送?能不能只锁定某些功能?应用锁耗电吗?本文将针对这些高频问题逐一解答,帮助您更好地使用鸿蒙系统(Harm…...

Python PIL 画矩形框
基础代码 from PIL import Image, ImageDraw# 打开图片 img Image.open(your_image.jpg)# 创建绘图对象 draw ImageDraw.Draw(img)# 矩形坐标 (x1, y1, x2, y2) coords (23, 21, 69, 76)# 画矩形框(红色,线宽2) draw.rectangle(coords, ou…...

2026智慧校园规划必读:如何在预算吃紧下选到高性价比方案
✅作者简介:合肥自友科技 📌核心产品:智慧校园平台(包括教工管理、学工管理、教务管理、考务管理、后勤管理、德育管理、资产管理、公寓管理、实习管理、就业管理、离校管理、科研平台、档案管理、学生平台等26个子平台) 。公司所有人员均有多…...

《我看见的世界:李飞飞自传》第1-6章阅读笔记:从移民少女到AI教母的“看见“之旅
前言 当我们谈论人工智能时,我们谈论的是算法、数据、算力,是那些冰冷的代码和复杂的模型。但在《我看见的世界:李飞飞自传》中,李飞飞用她独特的视角告诉我们:AI的本质,是人类对"看见"世界的渴望…...

从RD、CS到WK:一文讲透SAR主流成像算法的演进与选型实战
从RD、CS到WK:SAR成像算法选型实战指南 当无人机掠过灾区上空,或卫星扫描地球表面时,合成孔径雷达(SAR)正通过电磁波穿透云层和黑暗,将地面信息转化为高分辨率图像。而决定图像质量的关键,在于工…...

终极指南:5步快速掌握免费的3D点云标注工具labelCloud
终极指南:5步快速掌握免费的3D点云标注工具labelCloud 【免费下载链接】labelCloud A lightweight tool for labeling 3D bounding boxes in point clouds. 项目地址: https://gitcode.com/gh_mirrors/la/labelCloud 想要为自动驾驶、机器人视觉或3D目标检测…...

如何在浏览器中一键解密所有加密音乐文件:Unlock-Music完全指南
如何在浏览器中一键解密所有加密音乐文件:Unlock-Music完全指南 【免费下载链接】unlock-music 在浏览器中解锁加密的音乐文件。原仓库: 1. https://github.com/unlock-music/unlock-music ;2. https://git.unlock-music.dev/um/web 项目地…...