目标跟踪之sort算法(3)
这里写目录标题
- 1 流程
- 1 预处理
- 2 跟踪
- 2 代码
参考:sort代码 https://github.com/abewley/sort
1 流程
1 预处理
1.1 获取离线检测数据。1.2 实例化跟踪器。
2 跟踪
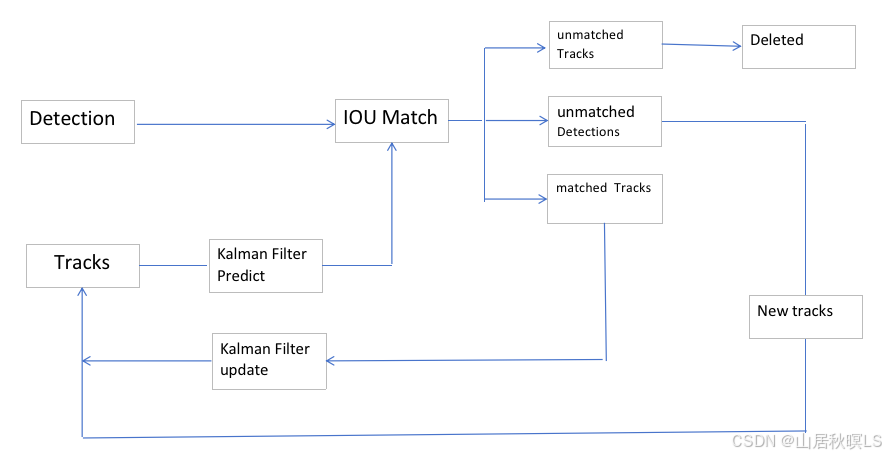
2.1 轨迹处理。根据上一帧的轨迹预测当前帧的轨迹,剔除到当前轨迹中为空的轨迹得到当前有效轨迹。
2.2 匹配。用匈牙利算法对有效轨迹和检测框匹配,得到匹配id、新检测id、未匹配ida. 如果跟踪器的个数为零,即第一帧图像,返回值为0的匹配id、新检测id、值为0的未匹配id。b. 如果跟踪器的个数为不为0,则计算检测框与当前轨迹的iou,如果iou不为空,得到iou大于阈值的掩码矩阵,判断掩码矩阵每行是否跟每列是一一对应,如果是则不需要匈牙利算法匹配;反之,用匈牙利算法得到匹配的检测框和轨迹的索引。c. 根据匹配索引得到新检测的框的id和为匹配的轨迹的id。d.根据iou再筛选一次。
2.3 更新轨迹。a. 对匹配上的轨迹,根据匹配id得到当前帧的最优估计。b. 添加新的检测。对于没有被匹配上的检测框生成新的跟踪器,并添加到轨迹中。c. 筛选轨迹。
2 代码
""" sort代码 https://github.com/abewley/sortSORT: A Simple, Online and Realtime TrackerCopyright (C) 2016-2020 Alex Bewley alex@bewley.aiThis program is free software: you can redistribute it and/or modifyit under the terms of the GNU General Public License as published bythe Free Software Foundation, either version 3 of the License, or(at your option) any later version.This program is distributed in the hope that it will be useful,but WITHOUT ANY WARRANTY; without even the implied warranty ofMERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See theGNU General Public License for more details.You should have received a copy of the GNU General Public Licensealong with this program. If not, see <http://www.gnu.org/licenses/>.-i https://pypi.tuna.tsinghua.edu.cn/simple
filterpy==1.4.5
scikit-image==0.14.0
lap==0.4.0
numba==0.38.1
scikit-learn==0.19.1
"""
from __future__ import print_functionimport os
import numpy as np
import matplotlib
matplotlib.use('TkAgg')
import matplotlib.pyplot as plt
import matplotlib.patches as patches
from skimage import ioimport glob
import time
import argparse
from filterpy.kalman import KalmanFilternp.random.seed(0)def linear_assignment(cost_matrix):try:import lap_, x, y = lap.lapjv(cost_matrix, extend_cost=True)return np.array([[y[i],i] for i in x if i >= 0])except ImportError:from scipy.optimize import linear_sum_assignmentx, y = linear_sum_assignment(cost_matrix)return np.array(list(zip(x, y)))def iou_batch(bb_test, bb_gt):"""From SORT: Computes IOU between two bboxes in the form [x1,y1,x2,y2]"""bb_gt = np.expand_dims(bb_gt, 0)bb_test = np.expand_dims(bb_test, 1)xx1 = np.maximum(bb_test[..., 0], bb_gt[..., 0])yy1 = np.maximum(bb_test[..., 1], bb_gt[..., 1])xx2 = np.minimum(bb_test[..., 2], bb_gt[..., 2])yy2 = np.minimum(bb_test[..., 3], bb_gt[..., 3])w = np.maximum(0., xx2 - xx1)h = np.maximum(0., yy2 - yy1)wh = w * ho = wh / ((bb_test[..., 2] - bb_test[..., 0]) * (bb_test[..., 3] - bb_test[..., 1]) + (bb_gt[..., 2] - bb_gt[..., 0]) * (bb_gt[..., 3] - bb_gt[..., 1]) - wh) return(o) def convert_bbox_to_z(bbox):"""Takes a bounding box in the form [x1,y1,x2,y2] and returns z in the form[x,y,s,r] where x,y is the centre of the box and s is the scale/area and r isthe aspect ratio"""w = bbox[2] - bbox[0]h = bbox[3] - bbox[1]x = bbox[0] + w/2.y = bbox[1] + h/2.s = w * h #scale is just arear = w / float(h)return np.array([x, y, s, r]).reshape((4, 1))def convert_x_to_bbox(x,score=None):"""Takes a bounding box in the centre form [x,y,s,r] and returns it in the form[x1,y1,x2,y2] where x1,y1 is the top left and x2,y2 is the bottom right"""w = np.sqrt(x[2] * x[3])h = x[2] / wif(score==None):return np.array([x[0]-w/2.,x[1]-h/2.,x[0]+w/2.,x[1]+h/2.]).reshape((1,4))else:return np.array([x[0]-w/2.,x[1]-h/2.,x[0]+w/2.,x[1]+h/2.,score]).reshape((1,5))class KalmanBoxTracker(object):"""This class represents the internal state of individual tracked objects observed as bbox."""count = 0def __init__(self,bbox):"""Initialises a tracker using initial bounding box."""#define constant velocity modelself.kf = KalmanFilter(dim_x=7, dim_z=4) self.kf.F = np.array([[1,0,0,0,1,0,0],[0,1,0,0,0,1,0],[0,0,1,0,0,0,1],[0,0,0,1,0,0,0], [0,0,0,0,1,0,0],[0,0,0,0,0,1,0],[0,0,0,0,0,0,1]])self.kf.H = np.array([[1,0,0,0,0,0,0],[0,1,0,0,0,0,0],[0,0,1,0,0,0,0],[0,0,0,1,0,0,0]])self.kf.R[2:,2:] *= 10.self.kf.P[4:,4:] *= 1000. #give high uncertainty to the unobservable initial velocitiesself.kf.P *= 10.self.kf.Q[-1,-1] *= 0.01self.kf.Q[4:,4:] *= 0.01self.kf.x[:4] = convert_bbox_to_z(bbox)self.time_since_update = 0self.id = KalmanBoxTracker.countKalmanBoxTracker.count += 1self.history = []self.hits = 0self.hit_streak = 0self.age = 0def update(self,bbox):"""Updates the state vector with observed bbox."""self.time_since_update = 0self.history = []self.hits += 1self.hit_streak += 1 # 连续匹配并更新的次数self.kf.update(convert_bbox_to_z(bbox))def predict(self):"""Advances the state vector and returns the predicted bounding box estimate."""if((self.kf.x[6]+self.kf.x[2])<=0):self.kf.x[6] *= 0.0self.kf.predict()self.age += 1if(self.time_since_update>0): # 上一次更新距离现在的时间self.hit_streak = 0 # 匹配次数归0self.time_since_update += 1 # 轨迹只预测没有匹配的的次数➕1self.history.append(convert_x_to_bbox(self.kf.x))return self.history[-1]def get_state(self):"""Returns the current bounding box estimate."""return convert_x_to_bbox(self.kf.x)def associate_detections_to_trackers(detections,trackers,iou_threshold = 0.3):"""Assigns detections to tracked object (both represented as bounding boxes)Returns 3 lists of matches, unmatched_detections and unmatched_trackers"""if(len(trackers)==0):return np.empty((0,2),dtype=int), np.arange(len(detections)), np.empty((0,5),dtype=int)iou_matrix = iou_batch(detections, trackers)if min(iou_matrix.shape) > 0:a = (iou_matrix > iou_threshold).astype(np.int32)if a.sum(1).max() == 1 and a.sum(0).max() == 1:matched_indices = np.stack(np.where(a), axis=1) # 如果正好是一个检测与一个轨迹匹配,则找出匹配的索引else:matched_indices = linear_assignment(-iou_matrix) # 匈牙利匹配,matched_indices存储的是每个检测框对应的轨迹,第一列存储的是检测框的id;第二列存储的是检测框匹配的轨迹idelse:matched_indices = np.empty(shape=(0,2)) unmatched_detections = [] # 寻找没有被匹配上的检测框for d, det in enumerate(detections): # 这一步写的麻烦,不用枚举if(d not in matched_indices[:,0]):unmatched_detections.append(d)unmatched_trackers = [] # 寻找没有被匹配上的轨迹for t, trk in enumerate(trackers):if(t not in matched_indices[:,1]):unmatched_trackers.append(t)#filter out matched with low IOUmatches = [] # 寻找被匹配上的检测框的idfor m in matched_indices: # 根据iou再进行一次筛选if(iou_matrix[m[0], m[1]]<iou_threshold):unmatched_detections.append(m[0])unmatched_trackers.append(m[1])else:matches.append(m.reshape(1,2))if(len(matches)==0):matches = np.empty((0,2),dtype=int)else:matches = np.concatenate(matches,axis=0)return matches, np.array(unmatched_detections), np.array(unmatched_trackers)class Sort(object):def __init__(self, max_age=1, min_hits=3, iou_threshold=0.3):"""Sets key parameters for SORT"""self.max_age = max_ageself.min_hits = min_hitsself.iou_threshold = iou_thresholdself.trackers = []self.frame_count = 0def update(self, dets=np.empty((0, 5))):"""Params:dets - a numpy array of detections in the format [[x1,y1,x2,y2,score],[x1,y1,x2,y2,score],...]Requires: this method must be called once for each frame even with empty detections (use np.empty((0, 5)) for frames without detections).Returns the a similar array, where the last column is the object ID.NOTE: The number of objects returned may differ from the number of detections provided."""self.frame_count += 1# get predicted locations from existing trackers.trks = np.zeros((len(self.trackers), 5)) # 存储筛选后的轨迹。第一帧shape=(0, 5);to_del = [] # 没有匹配的轨迹ret = [] # 存放检测所有合格的轨迹for t, trk in enumerate(trks):pos = self.trackers[t].predict()[0] # 根据上一帧的轨迹当前帧的轨迹.trk[:] = [pos[0], pos[1], pos[2], pos[3], 0]if np.any(np.isnan(pos)):to_del.append(t)trks = np.ma.compress_rows(np.ma.masked_invalid(trks)) # 剔除当前无效轨迹for t in reversed(to_del):self.trackers.pop(t) # 剔除上一帧中的无效轨迹matched, unmatched_dets, unmatched_trks = associate_detections_to_trackers(dets,trks, self.iou_threshold) # 第一帧没有轨迹,# update matched trackers with assigned detections 对匹配的轨迹更新for m in matched: # 根据当前轨迹和检测得到当前最优估计self.trackers[m[1]].update(dets[m[0], :])# create and initialise new trackers for unmatched detectionsfor i in unmatched_dets: # 对于没有被匹配上的检测框生成新的跟踪器,并添加到轨迹中trk = KalmanBoxTracker(dets[i,:])self.trackers.append(trk)i = len(self.trackers)for trk in reversed(self.trackers):d = trk.get_state()[0]if (trk.time_since_update < 1) and (trk.hit_streak >= self.min_hits or self.frame_count <= self.min_hits): #(当前更新的轨迹)and (连续匹配超过min_hits or 检测帧数小于min_hits)ret.append(np.concatenate((d,[trk.id+1])).reshape(1,-1)) # +1 as MOT benchmark requires positivei -= 1# remove dead trackletif(trk.time_since_update > self.max_age):self.trackers.pop(i)if(len(ret)>0):return np.concatenate(ret)return np.empty((0,5))def parse_args():"""Parse input arguments."""parser = argparse.ArgumentParser(description='SORT demo')parser.add_argument('--display', dest='display', help='Display online tracker output (slow) [False]',action='store_true')parser.add_argument("--seq_path", help="Path to detections.", type=str, default='data')parser.add_argument("--phase", help="Subdirectory in seq_path.", type=str, default='train')parser.add_argument("--max_age", help="Maximum number of frames to keep alive a track without associated detections.", type=int, default=1)parser.add_argument("--min_hits", help="Minimum number of associated detections before track is initialised.", type=int, default=3)parser.add_argument("--iou_threshold", help="Minimum IOU for match.", type=float, default=0.3)args = parser.parse_args()return argsif __name__ == '__main__':# all trainargs = parse_args()display = args.display # 是否显示结果phase = args.phase # 'trian'total_time = 0.0 # 总时长total_frames = 0 # 记录检测的帧数colours = np.random.rand(32, 3) # \used only for display [32,3]if(display):if not os.path.exists('mot_benchmark'):print('\n\tERROR: mot_benchmark link not found!\n\n Create a symbolic link to the MOT benchmark\n (https://motchallenge.net/data/2D_MOT_2015/#download). E.g.:\n\n $ ln -s /path/to/MOT2015_challenge/2DMOT2015 mot_benchmark\n\n')exit()plt.ion()fig = plt.figure()ax1 = fig.add_subplot(111, aspect='equal')if not os.path.exists('output'):os.makedirs('output')pattern = os.path.join(args.seq_path, phase, '*', 'det', 'det.txt') # 相对路径 'data/train/*/det/det.txt'# 1. 数据准备for seq_dets_fn in glob.glob(pattern):mot_tracker = Sort(max_age=args.max_age, # 1.1 初始化跟踪器min_hits=args.min_hits,iou_threshold=args.iou_threshold) # create instance of the SORT trackerseq_dets = np.loadtxt(seq_dets_fn, delimiter=',') # 1.2 加载数据seq = seq_dets_fn[pattern.find('*'):].split(os.path.sep)[0] # 'data/train/ETH-Bahnhof/det/det.txt' --> ['ETH-Bahnhof', 'det', 'det.txt'] --> 'ETH-Bahnhof'with open(os.path.join('output', '%s.txt'%(seq)),'w') as out_file: # 'output/ETH-Bahnhof.txt'print("Processing %s."%(seq))for frame in range(int(seq_dets[:,0].max())): # seq_dets[:,0]第一列为图片的序列号,遍历每一帧的检测结果frame += 1 # detection and frame numbers begin at 1dets = seq_dets[seq_dets[:, 0]==frame, 2:7] # x1,y1,w,h,cdets[:, 2:4] += dets[:, 0:2] # convert to [x1,y1,w,h] to [x1,y1,x2,y2]total_frames += 1if(display):fn = os.path.join('mot_benchmark', phase, seq, 'img1', '%06d.jpg'%(frame))im = io.imread(fn)ax1.imshow(im)plt.title(seq + ' Tracked Targets')start_time = time.time()trackers = mot_tracker.update(dets) # 2. 获取跟踪结果cycle_time = time.time() - start_timetotal_time += cycle_timefor d in trackers: # 画的是跟踪到的轨迹print('%d,%d,%.2f,%.2f,%.2f,%.2f,1,-1,-1,-1'%(frame,d[4],d[0],d[1],d[2]-d[0],d[3]-d[1]),file=out_file)if(display):d = d.astype(np.int32)ax1.add_patch(patches.Rectangle((d[0],d[1]),d[2]-d[0],d[3]-d[1],fill=False,lw=3,ec=colours[d[4]%32,:]))if(display):fig.canvas.flush_events()plt.draw()ax1.cla()print("Total Tracking took: %.3f seconds for %d frames or %.1f FPS" % (total_time, total_frames, total_frames / total_time))if(display):print("Note: to get real runtime results run without the option: --display")相关文章:
目标跟踪之sort算法(3)
这里写目录标题 1 流程1 预处理2 跟踪 2 代码 参考:sort代码 https://github.com/abewley/sort 1 流程 1 预处理 1.1 获取离线检测数据。1.2 实例化跟踪器。2 跟踪 2.1 轨迹处理。根据上一帧的轨迹预测当前帧的轨迹,剔除到当前轨迹中为空的轨迹得到当前…...

【java数据结构】HashMapOJ练习题
【java数据结构】HashMapOJ练习题 一、只出现一次的数字二 、随机链表的复制三 、宝石与石头四、坏键盘打字五、前K个高频单词 博客最后附有整篇博客的全部代码!!! 一、只出现一次的数字 只出现一次的数字 思路: 先遍历一遍数组…...

Nginx前端后端共用一个域名如何配置
在 Nginx 中配置前端和后端共用一个域名的情况,通常是通过路径或子路径将请求转发到不同的服务。以下是一个示例配置,假设: 前端静态文件在 /var/www/frontend/。 后端 API 服务运行在 http://127.0.0.1:5000。 域名是 example.comÿ…...
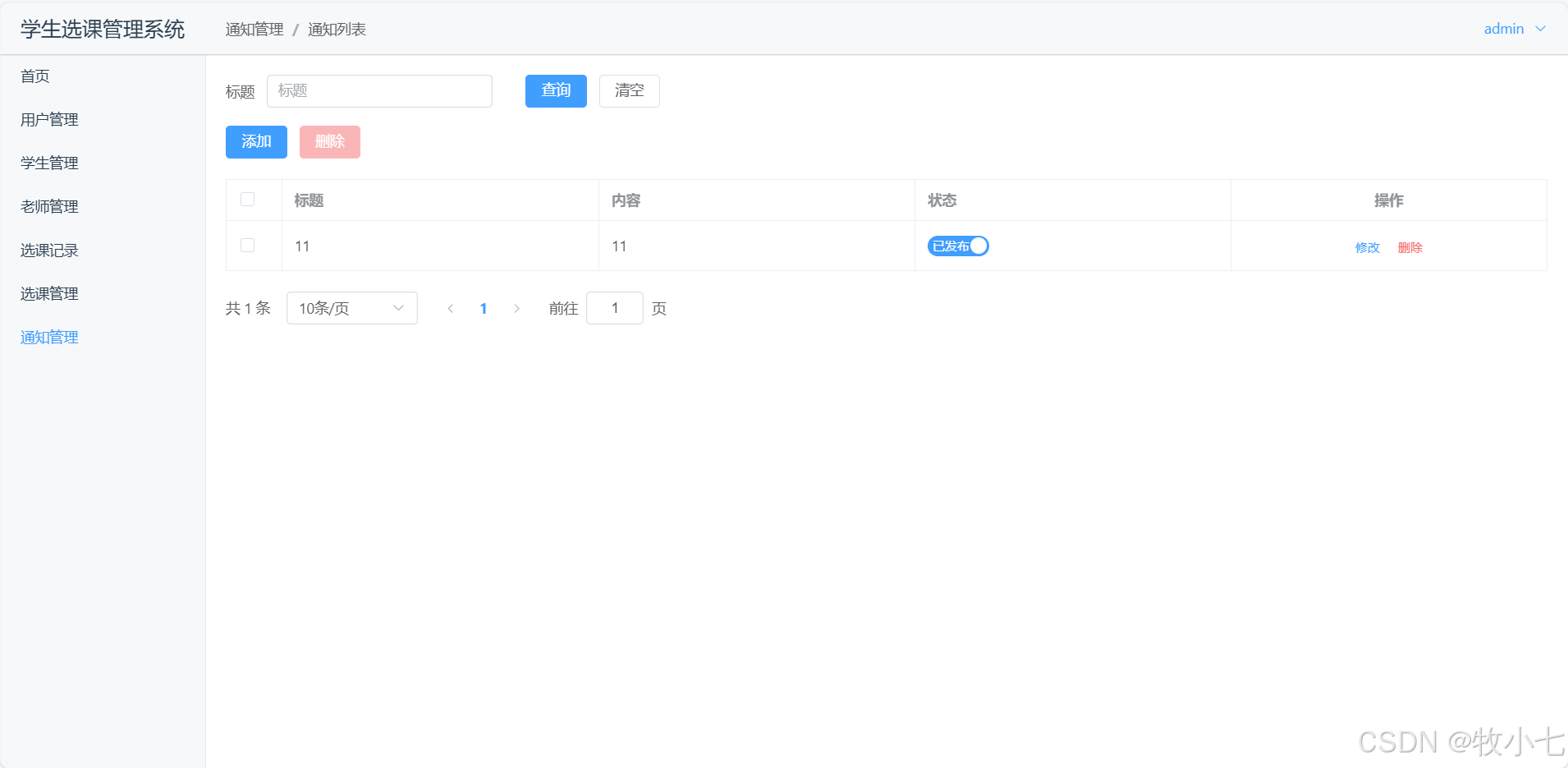
SpringBoot3+Vue3开发学生选课管理系统
功能介绍 分三个角色登录:学生登录,老师登录,教务管理员登录,不同用户功能不同! 1.学生用户功能 选课记录,查看选课记录,退选。选课管理,进行选课。通知管理,查看通知消…...
Linux系统 C/C++编程基础——基于GTK+的图形用户界面编程
ℹ️大家好,我是练小杰,今天星期三了,距离除夕又少了一天,新年的钟声就快敲响了😆 本文是有关Linux C/C编程中的基于GTK的图形用户界面编程知识点,后续会不断添加相关内容 ~~ 回顾:【使用make工具和Makefil…...

【Leetcode 每日一题】40. 组合总和 II
问题背景 给定一个候选人编号的集合 c a n d i d a t e s candidates candidates 和一个目标数 t a r g e t target target,找出 c a n d i d a t e s candidates candidates 中所有可以使数字和为 t a r g e t target target 的组合。 c a n d i d a t e s c…...

python 变量范围的定义与用法
文章目录 1. 局部变量(Local Scope)示例: 2. 嵌套函数变量(Enclosing Scope)示例:说明: 3. 全局变量(Global Scope)示例:说明: 4. 内置变量&#…...
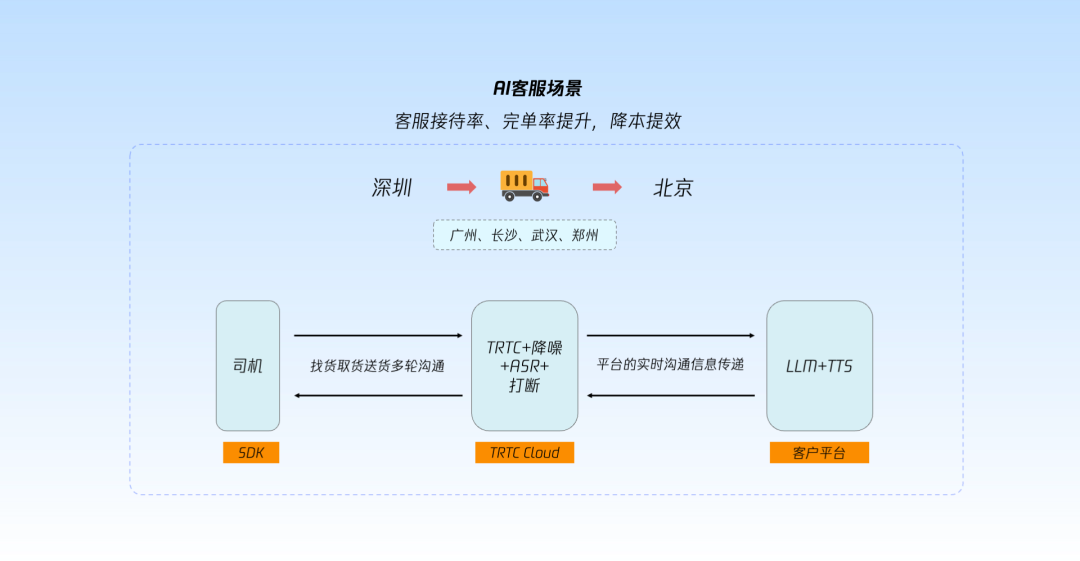
TRTC实时对话式AI解决方案,助力人机语音交互极致体验
近年来,AI热度持续攀升,无论是融资规模还是用户热度都大幅增长。2023 年,中国 AI 行业融资规模达2631亿人民币,较2022年上升51%;2024年第二季度,全球 AI 初创企业融资规模为 240 亿美金,较第一季…...

dev c++ ‘unordered_set‘ does not name a type
参考:https://blog.csdn.net/Zaczc/article/details/142531525 启用C11标准步骤 工具->编译选项 勾选编译时加入以下命令 在空白处添加:-stdc11 单击确定,启用成功...
算法每日双题精讲 —— 二分查找(寻找旋转排序数组中的最小值,点名)
🌟快来参与讨论💬,点赞👍、收藏⭐、分享📤,共创活力社区。 🌟 别再犹豫了!快来订阅我们的算法每日双题精讲专栏,一起踏上算法学习的精彩之旅吧💪 在算法的…...
three.js+WebGL踩坑经验合集(4.2):为什么不在可视范围内的3D点投影到2D的结果这么不可靠
上一篇,笔者留下了一个问题,three.js内置的THREE.Vector3.project方法算出来的结果对于超出屏幕可见范围的点来说错得相当离谱。 three.jsWebGL踩坑经验合集(4.1):THREE.Line2的射线检测问题(注意本篇说的是Line2,同样也不是阈值…...
- kafka 查看kafka的运行状态、broker.id不一致导致启动失败问题、topic消息积压量告警监控脚本)
Kafka运维宝典 (二)- kafka 查看kafka的运行状态、broker.id不一致导致启动失败问题、topic消息积压量告警监控脚本
Kafka运维宝典 (二) 文章目录 Kafka运维宝典 (二)一、kafka broker.id冲突问题1. broker.id 冲突的影响2. 如何发现 broker.id 冲突3. 解决 broker.id 冲突的方法4. broker.id 配置管理5. 集群启动后确认 broker.id 唯一性6. brok…...
全球AI模型百科全书,亚马逊云科技Bedrock上的100多款AI模型
今天小李哥给大家介绍的是亚马逊云科技上的AI模型管理平台Amazon Bedrock上的Marketplace,这是亚马逊云科技在今年re:Invent发布的一个全新功能,将亚马逊的电商基因带到了其云计算平台,让我们能够通过Amazon Bedrock访问100多种流行、新兴和专…...

微信小程序中常见的 跳转方式 及其特点的表格总结(wx.navigateTo 适合需要返回上一页的场景)
文章目录 详细说明总结wx.navigateTo 的特点为什么 wx.navigateTo 最常用?其他跳转方式的使用频率总结 以下是微信小程序中常见的跳转方式及其特点的表格总结: 跳转方式API 方法特点适用场景wx.navigateTowx.navigateTo({ url: 路径 })保留当前页面&…...

【Elasticsearch】index:false
在 Elasticsearch 中,index 参数用于控制是否对某个字段建立索引。当设置 index: false 时,意味着该字段不会被编入倒排索引中,因此不能直接用于搜索查询。然而,这并不意味着该字段完全不可访问或没有其他用途。以下是关于 index:…...
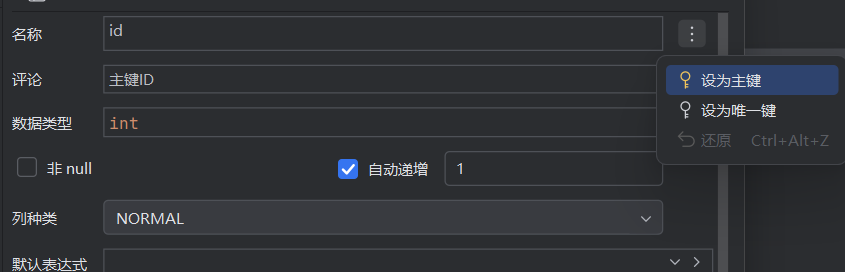
新版IDEA创建数据库表
这是老版本的IDEA创建数据库表,下面可以自己勾选Not null(非空),Auto inc(自增长),Unique(唯一标识)和Primary key(主键) 这是新版的IDEA创建数据库表,Not null和Auto inc可以看得到,但Unique和Primary key…...
输入带空格的字符串,求单词个数
输入带空格的字符串,求单词个数 __ueooe_eui_sjje__ ---->3syue__jdjd____die_ ---->3shuue__dju__kk ---->3 #include <stdio.h> #include <string.h>// 自定义函数来判断字符是否为空白字符 int isSpace(char c) {return c || c \t || …...

C语言程序设计十大排序—希尔排序
文章目录 1.概念✅2.希尔排序🎈3.代码实现✅3.1 直接写✨3.2 函数✨ 4.总结✅ 1.概念✅ 排序是数据处理的基本操作之一,每次算法竞赛都很多题目用到排序。排序算法是计算机科学中基础且常用的算法,排序后的数据更易于处理和查找。在计算机发展…...
Excel制作合同到期自动提醒!
大家好,我是小鱼。 今天分享一下如何利用Excel制作合同到期提醒表,实现Excel表格自动计算合同到期日和天数,根据合同状态和到期天数自动填充颜色提醒,超实用。先看一下效果,已经到期的合同会自动被填充为红色…...

“AI质量评估系统:智能守护,让品质无忧
嘿,各位小伙伴们!今天咱们来聊聊一个在现代社会中越来越重要的角色——AI质量评估系统。你知道吗?在这个快速发展的时代,产品质量已经成为企业生存和发展的关键。而AI质量评估系统,就像是我们的智能守护神,…...

Win10家庭版别再卡了!保姆级教程:手动修复gpedit.msc路径,彻底关闭Antimalware Service
Win10家庭版性能优化实战:精准修复组策略路径与系统服务调优每次游戏激战正酣时突然卡顿,或是视频渲染到关键时刻系统响应迟缓,很多Win10家庭版用户都遭遇过这类困扰。任务管理器里那个名为"Antimalware Service Executable"的进程…...

智慧树自动刷课助手:3步告别手动操作的学习效率工具
智慧树自动刷课助手:3步告别手动操作的学习效率工具 【免费下载链接】zhihuishu 智慧树刷课插件,自动播放下一集、1.5倍速度、无声 项目地址: https://gitcode.com/gh_mirrors/zh/zhihuishu 还在为智慧树平台的重复刷课操作而烦恼吗?智…...
)
别再只测accuracy!DeepSeek集成测试必须监控的5个隐性指标(P99首token延迟、context bleed率、tool-call schema漂移)
更多请点击: https://intelliparadigm.com 第一章:DeepSeek集成测试的核心范式演进 DeepSeek大模型的工程化落地对集成测试提出了全新挑战:传统基于接口响应码与字段校验的测试范式已难以覆盖语义一致性、推理链鲁棒性、上下文敏感度等高阶质…...
)
告别混乱绑定!在UE5 GAS中优雅管理技能输入(基于GameplayTag)
告别混乱绑定!在UE5 GAS中优雅管理技能输入(基于GameplayTag)当你的UE5 RPG项目发展到中期,技能数量从十几个膨胀到几十个时,最痛苦的莫过于发现InputAction绑定已经变成一团乱麻。每次新增技能都要修改输入绑定逻辑&a…...

双稳健机器学习:用正交性与交叉拟合解决因果推断中的ML偏差
1. 项目概述:当机器学习遇见因果推断的“干扰”难题在实证研究的日常工作中,我们常常面临一个核心矛盾:我们真正关心的,往往只是一个或几个关键参数——比如一项政策对就业率的平均影响(平均处理效应,ATE&a…...

MobX社区资源大全:10个必备工具、插件和扩展库推荐 [特殊字符]
MobX社区资源大全:10个必备工具、插件和扩展库推荐 🚀 【免费下载链接】MobX-Docs-CN MobX 中文文档 项目地址: https://gitcode.com/gh_mirrors/mo/MobX-Docs-CN MobX作为一个简单、可扩展的状态管理库,已经成为React开发者不可或缺的…...

【DeepSeek漏洞扫描辅助实战指南】:20年安全专家亲授3大避坑法则与5步提效流程
更多请点击: https://intelliparadigm.com 第一章:DeepSeek漏洞扫描辅助的核心价值与适用边界 DeepSeek漏洞扫描辅助并非通用型渗透测试引擎,而是一个聚焦于大语言模型(LLM)应用层安全的轻量级分析工具。其核心价值在…...

告别手动预约:i茅台自动预约系统5分钟部署指南
告别手动预约:i茅台自动预约系统5分钟部署指南 【免费下载链接】campus-imaotai i茅台app自动预约,每日自动预约,支持docker一键部署(本项目不提供成品,使用的是已淘汰的算法) 项目地址: https://gitcode…...

AI 如何改变软件工程:Martin Fowler 视角 + 实战洞见
AI 如何改变软件工程:Martin Fowler 视角 实战洞见 AI(尤其是 LLM)是软件工程自高级语言(从汇编到 C/Fortran)以来最大的转变。它引入了非确定性(Non-deterministic)编程,改变了从编…...

C语言有符号和无符号在内存中的存储方式区别小结
在 C 语言中,有符号类型(如 signed char、signed int)和无符号类型(如 unsigned char、unsigned int)在内存中的存储方式本质上没有区别——它们都是以二进制位的形式存储数值的。两者的核心差异体现在对二进制位的解…...