亚博microros小车-原生ubuntu支持系列:17 gmapping
前置依赖
先看下亚博官网的介绍
Gmapping简介
gmapping只适用于单帧二维激光点数小于1440的点,如果单帧激光点数大于1440,那么就会出【[mapping-4] process has died】 这样的问题。
Gmapping是基于滤波SLAM框架的常用开源SLAM算法。
Gmapping基于RBpf粒子滤波算法,即时定位和建图过程分离,先进行定位再进行建图。
Gmapping在RBpf算法上做了两个主要的改进:改进提议分布和选择性重采样。
优点:Gmapping可以实时构建室内地图,在构建小场景地图所需的计算量较小且精度较高。
缺点:随着场景增大所需的粒子增加,因为每个粒子都携带一幅地图,因此在构建大地图时所需内存和计算量都会增加。因此不适合构建大场景地图。并且没有回环检测,因此在回环闭合时可能会造成地图错位,虽然增加粒子数目可以使地图闭合但是以增加计算量和内存为代价。

底层转换
ros2 launch yahboomcar_bringup yahboomcar_bringup_launch.py #底层数据程序
参见:https://blog.csdn.net/bohu83/article/details/145394204
ros2 launch yahboomcar_nav map_gmapping_launch.py #建图节点
from launch import LaunchDescription
from launch_ros.actions import Node
import os
from launch.actions import IncludeLaunchDescription
from launch.launch_description_sources import PythonLaunchDescriptionSource
from ament_index_python.packages import get_package_share_directorydef generate_launch_description():slam_gmapping_launch = IncludeLaunchDescription(PythonLaunchDescriptionSource([os.path.join(get_package_share_directory('slam_gmapping'), 'launch'),'/slam_gmapping.launch.py']))base_link_to_laser_tf_node = Node(package='tf2_ros',executable='static_transform_publisher',name='base_link_to_base_laser',arguments=['-0.0046412', '0' , '0.094079','0','0','0','base_link','laser_frame'])return LaunchDescription([slam_gmapping_launch,base_link_to_laser_tf_node])这里启动了一个launch文件-slam_gmapping_launch和一个发布静态变换的节点-base_link_to_laser_tf_node。
从代码上看,依赖了slam_gmapping.
slam_gammping
可以从网上找个资料大概了解下,也可以看官网文档:gmapping - ROS Wiki

从文档大概看就是订阅话题:/scan 激光雷达数据、tf 坐标变换;发布了话题:map_metadata、map\~entropy 服务:dynamic_map 获取地图数据
launch还是要引用代码,所以apt-install 办法不适合,需要找源码编译安装。
https://github.com/ros-perception/slam_gmapping
找了这个地址,试了下编译安装。
CMake Error at CMakeLists.txt:5 (find_package):By not providing "Findcatkin.cmake" in CMAKE_MODULE_PATH this project hasasked CMake to find a package configuration file provided by "catkin", butCMake did not find one.Could not find a package configuration file provided by "catkin" with anyof the following names:catkinConfig.cmakecatkin-config.cmakeAdd the installation prefix of "catkin" to CMAKE_PREFIX_PATH or set"catkin_DIR" to a directory containing one of the above files. If "catkin"provides a separate development package or SDK, be sure it has beeninstalled.我的测试环境是ubuntu 22+ ros2 humble.系统缺少 catkin 这个包.
因为在ros2 中catkin 已经被ament取代,如何用ros2 中colcon build 编译 ros中 catkin的功能包?
需要修改源码和cmakelists把catkin相关的更换成ament,我看了下比较麻烦,直接使用了亚博官方的代码。工程结构如下所示,就是指定了启动脚本:src/slam_gmapping/launch/slam_gmapping.launch.py跟slam_gmapping.yaml

slam_gmapping.launch.py,这里启动了slam_gmapping的节点,加载了slam_gmapping.yaml参数文件。
slam_gmapping.yaml
/slam_gmapping:ros__parameters:angularUpdate: 0.5astep: 0.05base_frame: base_footprintmap_frame: mapodom_frame: odomdelta: 0.05iterations: 5kernelSize: 1lasamplerange: 0.005lasamplestep: 0.005linearUpdate: 1.0llsamplerange: 0.01llsamplestep: 0.01lsigma: 0.075lskip: 0lstep: 0.05map_update_interval: 5.0maxRange: 6.0maxUrange: 4.0minimum_score: 0.0occ_thresh: 0.25ogain: 3.0particles: 30qos_overrides:/parameter_events:publisher:depth: 1000durability: volatilehistory: keep_allreliability: reliable/tf:publisher:depth: 1000durability: volatilehistory: keep_lastreliability: reliableresampleThreshold: 0.5sigma: 0.05srr: 0.1srt: 0.2str: 0.1stt: 0.2temporalUpdate: 1.0transform_publish_period: 0.05use_sim_time: falsexmax: 10.0xmin: -10.0ymax: 10.0ymin: -10.0
运行
启动小车代理:

首先启动小车处理底层数据程序,
ros2 launch yahboomcar_bringup yahboomcar_bringup_launch.py
from ament_index_python.packages import get_package_share_pathfrom launch import LaunchDescription
from launch.actions import DeclareLaunchArgument
from launch.conditions import IfCondition, UnlessCondition
from launch.substitutions import Command, LaunchConfigurationfrom launch_ros.actions import Node
from launch_ros.parameter_descriptions import ParameterValuedef generate_launch_description():package_path = get_package_share_path('yahboomcar_nav')default_rviz_config_path = package_path / 'rviz/view.rviz'rviz_arg = DeclareLaunchArgument(name='rvizconfig', default_value=str(default_rviz_config_path),description='Absolute path to rviz config file')rviz_node = Node(package='rviz2',executable='rviz2',name='rviz2',output='screen',arguments=['-d', LaunchConfiguration('rvizconfig')],)return LaunchDescription([rviz_arg,rviz_node])
bohu@bohu-TM1701:~/yahboomcar/yahboomcar_ws$ ros2 launch yahboomcar_bringup yahboomcar_bringup_launch.py
[INFO] [launch]: All log files can be found below /home/bohu/.ros/log/2025-01-30-14-52-59-130561-bohu-TM1701-316456
[INFO] [launch]: Default logging verbosity is set to INFO
---------------------robot_type = x3---------------------
[INFO] [complementary_filter_node-1]: process started with pid [316458]
[INFO] [ekf_node-2]: process started with pid [316460]
[INFO] [static_transform_publisher-3]: process started with pid [316462]
[INFO] [joint_state_publisher-4]: process started with pid [316464]
[INFO] [robot_state_publisher-5]: process started with pid [316466]
[INFO] [static_transform_publisher-6]: process started with pid [316468]
[static_transform_publisher-3] [WARN] [1738219979.422738190] []: Old-style arguments are deprecated; see --help for new-style arguments
[static_transform_publisher-6] [WARN] [1738219979.430808316] []: Old-style arguments are deprecated; see --help for new-style arguments
[static_transform_publisher-3] [INFO] [1738219979.474861598] [base_link_to_base_imu]: Spinning until stopped - publishing transform
[static_transform_publisher-3] translation: ('-0.002999', '-0.003000', '0.031701')
[static_transform_publisher-3] rotation: ('0.000000', '0.000000', '0.000000', '1.000000')
[static_transform_publisher-3] from 'base_link' to 'imu_frame'
[static_transform_publisher-6] [INFO] [1738219979.486498703] [static_transform_publisher_dyynkHgPuvMB4QSZ]: Spinning until stopped - publishing transform
[static_transform_publisher-6] translation: ('0.000000', '0.000000', '0.050000')
[static_transform_publisher-6] rotation: ('0.000000', '0.000000', '0.000000', '1.000000')
[static_transform_publisher-6] from 'base_footprint' to 'base_link'
[complementary_filter_node-1] [INFO] [1738219979.494221633] [complementary_filter_gain_node]: Starting ComplementaryFilterROS
[robot_state_publisher-5] [WARN] [1738219979.497129656] [kdl_parser]: The root link base_link has an inertia specified in the URDF, but KDL does not support a root link with an inertia. As a workaround, you can add an extra dummy link to your URDF.
[robot_state_publisher-5] [INFO] [1738219979.497311822] [robot_state_publisher]: got segment base_link
[robot_state_publisher-5] [INFO] [1738219979.497405894] [robot_state_publisher]: got segment imu_Link
[robot_state_publisher-5] [INFO] [1738219979.497427256] [robot_state_publisher]: got segment jq1_Link
[robot_state_publisher-5] [INFO] [1738219979.497440404] [robot_state_publisher]: got segment jq2_Link
[robot_state_publisher-5] [INFO] [1738219979.497453384] [robot_state_publisher]: got segment radar_Link
[robot_state_publisher-5] [INFO] [1738219979.497465220] [robot_state_publisher]: got segment yh_Link
[robot_state_publisher-5] [INFO] [1738219979.497477294] [robot_state_publisher]: got segment yq_Link
[robot_state_publisher-5] [INFO] [1738219979.497489516] [robot_state_publisher]: got segment zh_Link
[robot_state_publisher-5] [INFO] [1738219979.497501480] [robot_state_publisher]: got segment zq_Link
[joint_state_publisher-4] [INFO] [1738219980.049008205] [joint_state_publisher]: Waiting for robot_description to be published on the robot_description topic...
然后,启动rviz,可视化建图,终端输入,
ros2 launch yahboomcar_nav display_launch.py
此时还没运行建图节点,所以没有数据。接下来运行建图节点,终端输入,
ros2 launch yahboomcar_nav map_gmapping_launch.py
from launch import LaunchDescription
from launch_ros.actions import Node
import os
from launch.actions import IncludeLaunchDescription
from launch.launch_description_sources import PythonLaunchDescriptionSource
from ament_index_python.packages import get_package_share_directorydef generate_launch_description():slam_gmapping_launch = IncludeLaunchDescription(PythonLaunchDescriptionSource([os.path.join(get_package_share_directory('slam_gmapping'), 'launch'),'/slam_gmapping.launch.py']))base_link_to_laser_tf_node = Node(package='tf2_ros',executable='static_transform_publisher',name='base_link_to_base_laser',arguments=['-0.0046412', '0' , '0.094079','0','0','0','base_link','laser_frame'])return LaunchDescription([slam_gmapping_launch,base_link_to_laser_tf_node])
#启动键盘控制 ros2 run yahboomcar_ctrl yahboom_keyboard
控制小车慢慢转一圈。最终效果如下
生成的map

建图完毕后,输入以下指令保存地图,终端输入,
ros2 launch yahboomcar_nav save_map_launch.py
from ament_index_python.packages import get_package_share_pathfrom launch import LaunchDescription
from launch.actions import DeclareLaunchArgument
from launch.substitutions import LaunchConfigurationfrom launch_ros.actions import Node
import osdef generate_launch_description():package_share_path = str(get_package_share_path('yahboomcar_nav'))package_path = os.path.abspath(os.path.join(package_share_path, "../../../../src/yahboomcar_nav"))map_name = "yahboom_map"default_map_path = os.path.join(package_path, 'maps', map_name)map_arg = DeclareLaunchArgument(name='map_path', default_value=str(default_map_path),description='The path of the map')map_saver_node = Node(package='nav2_map_server',executable='map_saver_cli',arguments=['-f', LaunchConfiguration('map_path'), '--ros-args', '-p', 'save_map_timeout:=60000.00'],)return LaunchDescription([map_arg,map_saver_node])bohu@bohu-TM1701:~/yahboomcar/yahboomcar_ws$ ros2 launch yahboomcar_nav save_map_launch.py
[INFO] [launch]: All log files can be found below /home/bohu/.ros/log/2025-01-30-15-33-14-161314-bohu-TM1701-319017
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [map_saver_cli-1]: process started with pid [319018]
[map_saver_cli-1] [INFO] [1738222394.419546962] [map_saver]:
[map_saver_cli-1] map_saver lifecycle node launched.
[map_saver_cli-1] Waiting on external lifecycle transitions to activate
[map_saver_cli-1] See https://design.ros2.org/articles/node_lifecycle.html for more information.
[map_saver_cli-1] [INFO] [1738222394.419654445] [map_saver]: Creating
[map_saver_cli-1] [INFO] [1738222394.419713380] [map_saver]: Configuring
[map_saver_cli-1] [INFO] [1738222394.420777030] [map_saver]: Saving map from 'map' topic to '/home/bohu/yahboomcar/yahboomcar_ws/src/yahboomcar_nav/maps/yahboom_map' file
[map_saver_cli-1] [WARN] [1738222394.420801411] [map_saver]: Free threshold unspecified. Setting it to default value: 0.250000
[map_saver_cli-1] [WARN] [1738222394.420813330] [map_saver]: Occupied threshold unspecified. Setting it to default value: 0.650000
[map_saver_cli-1] [WARN] [1738222395.293844583] [map_io]: Image format unspecified. Setting it to: pgm
[map_saver_cli-1] [INFO] [1738222395.294086677] [map_io]: Received a 384 X 608 map @ 0.05 m/pix
[map_saver_cli-1] [INFO] [1738222395.473549155] [map_io]: Writing map occupancy data to /home/bohu/yahboomcar/yahboomcar_ws/src/yahboomcar_nav/maps/yahboom_map.pgm
[map_saver_cli-1] [INFO] [1738222395.474901659] [map_io]: Writing map metadata to /home/bohu/yahboomcar/yahboomcar_ws/src/yahboomcar_nav/maps/yahboom_map.yaml
[map_saver_cli-1] [INFO] [1738222395.475071124] [map_io]: Map saved
[map_saver_cli-1] [INFO] [1738222395.475082707] [map_saver]: Map saved successfully
[map_saver_cli-1] [INFO] [1738222395.737027994] [map_saver]: Destroying
[INFO] [map_saver_cli-1]: process has finished cleanly [pid 319018]
会有两个文件生成,一个是yahboom_map.pgm,一个是yahboom_map.yaml,看下yaml的内容,
image: yahboom_map.pgm
mode: trinary
resolution: 0.05
origin: [-10, -10, 0]
negate: 0
occupied_thresh: 0.65
free_thresh: 0.25
-
image:表示地图的图片,也就是yahboom_map.pgm
-
mode:该属性可以是trinary、scale或者raw之一,取决于所选择的mode,trinary模式是默认模式
-
resolution:地图的分辨率, 米/像素
-
origin:地图左下角的 2D 位姿(x,y,yaw), 这里的yaw是逆时针方向旋转的(yaw=0 表示没有旋转)。目前系统中的很多部分会忽略yaw值。
-
negate:是否颠倒 白/黑 、自由/占用 的意义(阈值的解释不受影响)
-
occupied_thresh:占用概率大于这个阈值的的像素,会被认为是完全占用。
-
free_thresh:占用概率小于这个阈值的的像素,会被认为是完全自由。
其他的属性:
TFtree

节点通讯图

应该是小车第一次运行激光雷达进行建图。
以上
相关文章:
亚博microros小车-原生ubuntu支持系列:17 gmapping
前置依赖 先看下亚博官网的介绍 Gmapping简介 gmapping只适用于单帧二维激光点数小于1440的点,如果单帧激光点数大于1440,那么就会出【[mapping-4] process has died】 这样的问题。 Gmapping是基于滤波SLAM框架的常用开源SLAM算法。 Gmapping基于RBp…...

Java面试题2025-并发编程进阶(线程池和并发容器类)
线程池 一、什么是线程池 为什么要使用线程池 在开发中,为了提升效率的操作,我们需要将一些业务采用多线程的方式去执行。 比如有一个比较大的任务,可以将任务分成几块,分别交给几个线程去执行,最终做一个汇总就可…...

Stable Diffusion 3.5 介绍
Stable Diffusion 3.5 是由 Stability AI 推出的最新一代图像生成模型,是 Stable Diffusion 系列的重要升级版本。以下是关于 Stable Diffusion 3.5 的详细信息: 版本概述 Stable Diffusion 3.5 包含三个主要版本: Stable Diffusion 3.5 L…...

云计算部署模式全面解析
目录 引言公有云私有云混合云三种部署模式的对比选择建议未来趋势结语 1. 引言 随着云计算技术的快速发展,企业在选择云部署模式时面临着多种选择。本文将深入探讨云计算的三种主要部署模式:公有云、私有云和混合云,帮助读者全面了解它们的特点、优势及适用场景。 © iv…...

Vue 与 Electron 结合开发桌面应用
1. 引言 1.1 什么是 Electron? Electron 是一个使用 JavaScript、HTML 和 CSS 构建跨平台桌面应用程序的框架。它结合了 Chromium 渲染引擎和 Node.js 运行时,使得开发者可以使用 Web 技术创建原生桌面应用。1.2 为什么选择 Vue.js 和 Electron? Vue.js 是一个渐进式 JavaSc…...

数据库优化:提升性能的关键策略
1. 引言 在后端开发中,数据库的性能直接影响系统的稳定性和响应速度。随着业务增长,数据库查询变慢、负载过高等问题可能会影响用户体验。 本文将介绍数据库优化的关键策略,包括索引优化、查询优化、分库分表、缓存机制等,并结合…...

使用openAI与Deepseek的感受
今天简单介绍下使用OpenAI和DeepSeek的感觉,有些地方可能存在不准确的地方,望指正: 从2023年的秋冬到现在2025年的1月间,OpenAI和DeepSeek我都用它们来帮我,当然更多的是OpenAI,但整体感受如下:…...
pytorch实现长短期记忆网络 (LSTM)
人工智能例子汇总:AI常见的算法和例子-CSDN博客 LSTM 通过 记忆单元(cell) 和 三个门控机制(遗忘门、输入门、输出门)来控制信息流: 记忆单元(Cell State) 负责存储长期信息&…...

【ubuntu】双系统ubuntu下一键切换到Windows
ubuntu下一键切换到Windows 1.4.1 重启脚本1.4.2 快捷方式1.4.3 移动快捷方式到系统目录 按前文所述文档,开机默认启动ubuntu。Windows切换到Ubuntu直接重启就行了,而Ubuntu切换到Windows稍微有点麻烦。可编辑切换重启到Windows的快捷方式。 1.4.1 重启…...

【PyTorch】6.张量形状操作:在深度学习的 “魔方” 里,玩转张量形状
目录 1. reshape 函数的用法 2. transpose 和 permute 函数的使用 4. squeeze 和 unsqueeze 函数的用法 5. 小节 个人主页:Icomi 专栏地址:PyTorch入门 在深度学习蓬勃发展的当下,PyTorch 是不可或缺的工具。它作为强大的深度学习框架&am…...

大模型GUI系列论文阅读 DAY4续:《Large Language Model Agent for Fake News Detection》
摘要 在当前的数字时代,在线平台上虚假信息的迅速传播对社会福祉、公众信任和民主进程构成了重大挑战,并影响着关键决策和公众舆论。为应对这些挑战,自动化假新闻检测机制的需求日益增长。 预训练的大型语言模型(LLMs࿰…...

论文阅读(九):通过概率图模型建立连锁不平衡模型和进行关联研究:最新进展访问之旅
1.论文链接:Modeling Linkage Disequilibrium and Performing Association Studies through Probabilistic Graphical Models: a Visiting Tour of Recent Advances 摘要: 本章对概率图模型(PGMs)的最新进展进行了深入的回顾&…...

python小知识-typing注解你的程序
python小知识-typing注解你的程序 1. Typing的简介 typing 是 Python 的一个标准库,它提供了类型注解的支持,但并不会强制类型检查。类型注解在 Python 3.5 中引入,并在后续版本中得到了增强和扩展。typing 库允许开发者为变量、函数参数和…...

git基础使用--1--版本控制的基本概念
git基础使用–1–版本控制的基本概念 1.版本控制的需求背景,即为啥需要版本控制 先说啥叫版本,这个就不多说了吧,我们写代码的时候肯定不可能一蹴而就,肯定是今天写一点,明天写一点,对于项目来讲ÿ…...

“新月智能武器系统”CIWS,开启智能武器的新纪元
新月人物传记:人物传记之新月篇-CSDN博客 相关文章链接:星际战争模拟系统:新月的编程之道-CSDN博客 新月智能护甲系统CMIA--未来战场的守护者-CSDN博客 “新月之智”智能战术头盔系统(CITHS)-CSDN博客 目录 智能武…...
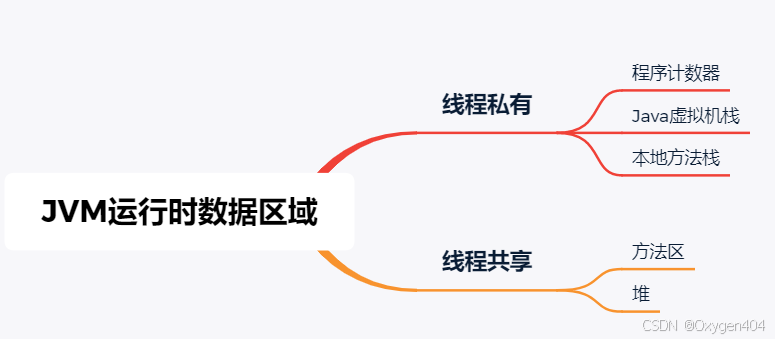
JVM运行时数据区域-附面试题
Java虚拟机在执行Java程序的过程中会把它所管理的内存划分为若干个不同的数据区域。这些区域 有各自的用途,以及创建和销毁的时间,有的区域随着虚拟机进程的启动而一直存在,有些区域则是 依赖用户线程的启动和结束而建立和销毁。 1. 程序计…...
增删改查(CRUD)操作
文章目录 MySQL系列:1.CRUD简介2.Create(创建)2.1单行数据全列插入2.2 单行数据指定插入2.3 多⾏数据指定列插⼊ 3.Retrieve(读取)3.1 Select查询3.1.1 全列查询3.1.2 指定列查询3.1.3 查询字段为表达式(都是临时表不会对原有表数据产生影响)…...

Vue.js `Suspense` 和异步组件加载
Vue.js Suspense 和异步组件加载 今天我们来聊聊 Vue 3 中的一个强大特性:<Suspense> 组件,以及它如何帮助我们更优雅地处理异步组件加载。如果你曾在 Vue 项目中处理过异步组件加载,那么这篇文章将为你介绍一种更简洁高效的方式。 什…...
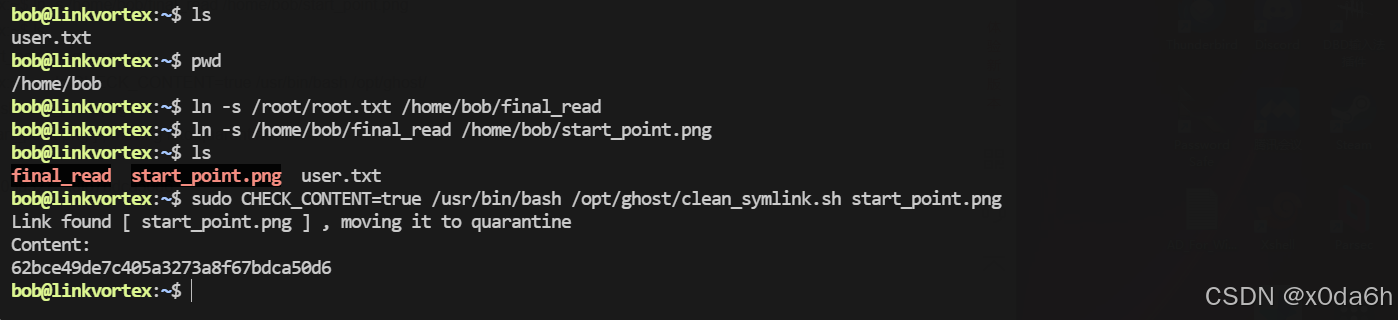
HTB:LinkVortex[WriteUP]
目录 连接至HTB服务器并启动靶机 信息收集 使用rustscan对靶机TCP端口进行开放扫描 使用nmap对靶机TCP开放端口进行脚本、服务扫描 使用nmap对靶机TCP开放端口进行漏洞、系统扫描 使用nmap对靶机常用UDP端口进行开放扫描 使用gobuster对靶机进行路径FUZZ 使用ffuf堆靶机…...

Linux命令入门
Linux命令入门 ls命令 ls命令的作用是列出目录下的内容,语法细节如下: 1s[-a -l -h] [Linux路径] -a -l -h是可选的选项 Linux路径是此命令可选的参数 当不使用选项和参数,直接使用ls命令本体,表示:以平铺形式,列出当前工作目录下的内容 ls命令的选项 -a -a选项&a…...

孤舟笔记 互联网常用框架篇三 Dubbo是如何动态感知服务下线的?注册中心和服务端双保险
文章目录先说结论机制一:注册中心通知机制二:心跳检测机制三:连接事件感知机制四:定时拉取四种机制的协作回答技巧与点评加分回答面试官点评个人网站微服务环境下,服务实例随时可能上下线——重启、扩容、宕机……调用…...

基于随机森林的低成本传感器机器学习校准实践指南
1. 项目概述:当低成本传感器遇上机器学习校准在物联网和智能感知系统铺天盖地的今天,低成本传感器几乎无处不在。从监测办公室的空气质量,到追踪城市街道的噪音污染,再到农业大棚里的温湿度控制,这些价格亲民的“小眼睛…...

基于USB ACA模式实现安卓手机边玩边充的游戏手柄设计
1. 项目缘起:当手机性能过剩,却败给了触摸屏几年前,我清理手机游戏时,发现一个挺无奈的现象:性能足以媲美掌机的智能手机里,只剩下一些慢节奏的平台解谜或者数独。那些曾经让我在掌机上废寝忘食的赛车、动作…...

3步快速解密中兴光猫配置:ZET工具终极实战指南
3步快速解密中兴光猫配置:ZET工具终极实战指南 【免费下载链接】ZET-Optical-Network-Terminal-Decoder 项目地址: https://gitcode.com/gh_mirrors/ze/ZET-Optical-Network-Terminal-Decoder 中兴光猫配置解密工具是每个网络管理员必备的神器!Z…...

3步快速部署:智能茅台抢购平台的终极自动化解决方案
3步快速部署:智能茅台抢购平台的终极自动化解决方案 【免费下载链接】campus-imaotai i茅台app自动预约,每日自动预约,支持docker一键部署(本项目不提供成品,使用的是已淘汰的算法) 项目地址: https://gi…...

哪款台灯护眼效果最好孩子用?实测口碑爆款护眼灯品牌,买前必看
哪款台灯护眼效果最好孩子用?作为家长,最揪心的就是孩子的视力问题。有数据显示,现在孩子近视率越来越高,小学就有不少戴眼镜的,中学更是过半,看着实在让人担心。 孩子每天低头写作业、看书,灯光…...
虚拟显示器优化指南)
拒绝延迟与黑屏:向日葵控制端 局域网直连 P2P 穿透与无头服务器(Headless)虚拟显示器优化指南
拒绝延迟与黑屏:向日葵控制端 局域网直连 P2P 穿透与无头服务器(Headless)虚拟显示器优化指南 在远程开发、分布式部署及日常运维场景中,我们经常需要远程连接到公司的高配工作站、机房服务器或家中的调试开发机。 作为国内普及…...

You-Get下载视频音画不同步?可能是FFmpeg路径没配对!附Mac/Linux/Windows三平台配置指南
You-Get跨平台音视频同步解决方案:FFmpeg环境配置全指南 当你在Mac上流畅使用you-get下载合并好的视频,切换到Windows却遭遇音画分离的尴尬时,问题往往出在FFmpeg的环境配置上。本文将带你深入理解多平台下FFmpeg的配置差异,并提…...

023、深度可分离卷积:MobileNet背后的计算优化
深度可分离卷积:MobileNet背后的计算优化 一个让我加了两天班的bug 去年调试一块基于Cortex-M7的AI推理引擎,跑MobileNetV1时发现推理速度比理论计算慢了整整一个数量级。当时我盯着逻辑分析仪上的波形,CPU在卷积层卡了将近300ms——这不对劲,理论计算应该只要30ms。 排…...

3步解锁网盘全速下载:LinkSwift开源助手深度使用指南
3步解锁网盘全速下载:LinkSwift开源助手深度使用指南 【免费下载链接】Online-disk-direct-link-download-assistant 一个基于 JavaScript 的网盘文件下载地址获取工具。基于【网盘直链下载助手】修改 ,支持 百度网盘 / 阿里云盘 / 中国移动云盘 / 天翼云…...