步进电机软件细分算法解析与实践指南

1. 步进电机细分技术概述
步进电机是一种将电脉冲信号转换为角位移的执行机构,其基本运动单位为步距角。传统步进电机的步距角通常为 1.8°(对应 200 步 / 转),但在高精度定位场景下,这种分辨率已无法满足需求。细分技术通过控制绕组电流的大小,将一个完整的步距角划分为多个微步,从而实现更高的分辨率和更平滑的运动。
细分的核心原理: 通过控制电机绕组的电流幅值,使电机磁场方向连续变化,从而将机械步分解为更小的微步。例如,1/16 细分意味着将 1.8° 的步距角分解为 1.8°/16=0.1125° 的微步,电机每转需要 3200 个脉冲。
2. 软件细分算法解析
软件细分算法通过微控制器(如 STM32)实时计算绕组电流的目标值,并通过 PWM 或 DAC 输出控制信号。以下是常见的细分算法实现方式:
2.1 线性插值法
- 原理:将每个步距的电流变化近似为线性递增 / 递减。
- 实现: 假设目标电流为
 ,细分步数为 N,则第 k 步的电流为:
,细分步数为 N,则第 k 步的电流为: -

- 优缺点:算法简单,但电流波形为梯形波,易产生振动和噪声。
2.2 正弦波细分法
- 原理:根据正弦规律控制两相绕组的电流,使合成磁场方向连续变化。
- 实现: 假设细分步数为 N,则第 k 步的电流为:

- 优缺点:电流波形更平滑,振动和噪声显著降低,但计算复杂度较高。
2.3 查表法
- 原理:预先计算各细分步的电流值并存储在数组中,运行时直接查表输出。
- 实现:
// 正弦波细分表(1/16细分) const float sine_table[16] = {0.0000, 0.3827, 0.7071, 0.9239,1.0000, 0.9239, 0.7071, 0.3827,0.0000, -0.3827, -0.7071, -0.9239,-1.0000, -0.9239, -0.7071, -0.3827 }; - 优缺点:计算速度快,但需占用内存存储细分表。
3. 软件细分功能实现
以 STM32F407 微控制器为例,实现四相步进电机的 1/16 细分控制。
3.1 硬件连接
- 电机驱动:使用 L298N 或 A4988 等驱动模块,连接 STM32 的 PWM 输出引脚。
- 电流检测:通过 ADC 采样绕组电流,实现闭环控制(可选)。
3.2 软件设计
-
定时器初始化: 使用高级定时器(如 TIM1)生成 PWM 信号,频率根据电机最高转速确定。
TIM_HandleTypeDef htim1; TIM_OC_InitTypeDef sConfigOC;htim1.Instance = TIM1; htim1.Init.Prescaler = 83; // 84MHz / 84 = 1MHz htim1.Init.Period = 999; // PWM频率 = 1MHz / 1000 = 1kHz HAL_TIM_PWM_Init(&htim1);sConfigOC.OCMode = TIM_OCMODE_PWM1; sConfigOC.Pulse = 0; sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH; HAL_TIM_PWM_ConfigChannel(&htim1, &sConfigOC, TIM_CHANNEL_1); HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_1); -
细分控制逻辑: 根据目标细分步数更新 PWM 占空比。
void set_current(float current) {uint32_t pulse = current * 1000; // 假设电流范围0-1A,对应PWM 0-1000__HAL_TIM_SetCompare(&htim1, TIM_CHANNEL_1, pulse); }void step_motor(int direction, int steps) {for (int i = 0; i < steps; i++) {for (int k = 0; k < 16; k++) { // 1/16细分float i_a = sine_table[k] * max_current;float i_b = sine_table[(k + 4) % 16] * max_current;set_current(i_a, i_b);HAL_Delay(1); // 根据速度调整延时}} }
4. 应用场景
- 3D 打印机:提高打印精度,减少层纹。
- 雕刻机:实现精细雕刻,降低振动。
- 医疗设备:如输液泵、显微镜载物台的精密定位。
- 机器人关节:平滑运动,减少机械磨损。
5. 软件细分 vs 硬件细分
| 对比项 | 软件细分 | 硬件细分 |
|---|---|---|
| 成本 | 低(依赖软件算法,无需专用芯片) | 高(需专用细分驱动芯片) |
| 灵活性 | 高(可动态调整细分倍数) | 低(固定细分倍数) |
| 实时性 | 受 CPU 性能限制 | 高(硬件电路直接处理) |
| 精度 | 依赖算法和 ADC 精度 | 高(专用芯片优化) |
| 适用场景 | 低成本、中等精度需求 | 高可靠性、高速高精度场景 |
6. 编程要点与优化
-
电流控制:
- 使用 PWM 输出控制电流时,需考虑电机绕组的电感特性,避免电流过冲。
- 加入电流反馈(ADC 采样)实现闭环控制,提高精度。
-
速度平滑:
- 采用 S 曲线加减速算法,避免启停时的冲击。
// S曲线加减速示例 void s_curve_acceleration(int target_speed) {for (int speed = 0; speed < target_speed; speed++) {delay_time = base_delay - speed * acceleration;HAL_Delay(delay_time);} } -
抗干扰设计:
- 对 PWM 信号和电流采样信号进行滤波处理,减少噪声影响。
7. 总结
软件细分算法通过灵活的控制策略和低成本实现,成为步进电机高精度控制的重要手段。尽管其性能受限于微控制器的处理能力,但在大多数工业和消费场景中已能满足需求。未来,随着嵌入式系统性能的提升,软件细分将进一步扩展其应用边界,推动步进电机控制技术的革新。
相关文章:
步进电机软件细分算法解析与实践指南
1. 步进电机细分技术概述 步进电机是一种将电脉冲信号转换为角位移的执行机构,其基本运动单位为步距角。传统步进电机的步距角通常为 1.8(对应 200 步 / 转),但在高精度定位场景下,这种分辨率已无法满足需求。细分技术…...

pytorch retain_grad vs requires_grad
requires_grad大家都挺熟悉的,因此穿插在retain_grad的例子里进行捎带讲解就行。下面看一个代码片段: import torch# 创建一个标量 tensor,并开启梯度计算 x torch.tensor(2.0, requires_gradTrue)# 中间计算:y 依赖于 x&#x…...

RabbitMQ消息队列中间件安装部署教程(Windows)-2025最新版详细图文教程(附所需安装包)
目录 前言 一、安装Erlang环境 1、下载Erlang安装包 2、安装Erlang 3、设置环境变量 二、安装RabbitMQ环境 1、下载RabbitMQ安装包 2、安装RabbitMQ 3、设置环境变量 三、启动RabbitMQ 1、开启RabbitMQ管理插件 2、启动RabbitMQ 四、访问RabbitMQ 前言 RabbitMQ 是…...

vue-cli3+vue2+elementUI+avue升级到vite+vue3+elementPlus+avue总结
上一个新公司接手了一个vue-cli3vue2vue-router3.0elementUI2.15avue2.6的后台管理项目,因为vue2在2023年底已经不更新维护了,elementUI也只支持到vue2,然后总结了一下vue3的优势,最后批准升级成为了vitevue3vue-router4.5element…...

车载以太网测试-3【Wireshark介绍】
1 摘要 Wireshark 是一款开源的网络协议分析工具,广泛用于网络故障排查、协议分析、网络安全检测等领域。它能够捕获网络数据包,并以详细的、可读的格式显示这些数据包的内容。广泛应用于车载网络测试,是车载网络测试工程师必须掌握的工具。…...

扫雷雷雷雷雷雷雷
大家好啊,我是小象٩(๑ω๑)۶ 我的博客:Xiao Xiangζั͡ޓއއ 很高兴见到大家,希望能够和大家一起交流学习,共同进步。 这一节课我们不学习新的知识,我们来做一个扫雷小游戏 目录 扫雷小游戏概述一、扫雷游戏分析…...
)
图片分类实战:食物分类问题(含半监督)
食物分类问题 simple_class 1. 导入必要的库和模块 import random import torch import torch.nn as nn import numpy as np import os from PIL import Image #读取图片数据 from torch.utils.data import Dataset, DataLoader from tqdm import tqdm from torchvision impo…...

RuoYi框架添加自己的模块(学生管理系统CRUD)
RuoYi框架添加自己的模块(学生管理系统) 框架顺利运行 首先肯定要顺利运行框架了,这个我不多说了 设计数据库表 在ry数据库中添加表tb_student 表字段如图所示 如图所示 注意id字段是自增的 注释部分是后面成功后前端要展示的部分 导入…...

机器学习在地图制图学中的应用
原文链接:https://www.tandfonline.com/doi/full/10.1080/15230406.2023.2295948#abstract CSDN/2025/Machine learning in cartography.pdf at main keykeywu2048/CSDN GitHub 核心内容 本文是《制图学与地理信息科学》特刊的扩展评论,系统探讨了机…...
)
【JAVA架构师成长之路】【电商系统实战】第9集:订单超时关闭实战(Kafka延时队列 + 定时任务补偿)
30分钟课程:订单超时关闭实战(Kafka延时队列 定时任务补偿) 课程目标 理解订单超时关闭的业务场景与核心需求。掌握基于 Kafka 延时队列与定时任务的关单方案设计。实现高并发场景下的可靠关单逻辑(防重复、幂等性)。…...

《探秘课程蒸馏体系“三阶训练法”:解锁知识层级递进式迁移的密码》
在人工智能与教育科技深度融合的时代,如何高效地实现知识传递与能力提升,成为众多学者、教育工作者以及技术专家共同探索的课题。课程蒸馏体系中的“三阶训练法”,作为一种创新的知识迁移模式,正逐渐崭露头角,为解决这…...
Pod)
K8s 1.27.1 实战系列(六)Pod
一、Pod介绍 1、Pod 的定义与核心设计 Pod 是 Kubernetes 的最小调度单元,由一个或多个容器组成,这些容器共享网络、存储、进程命名空间等资源,形成紧密协作的应用单元。Pod 的设计灵感来源于“豌豆荚”模型,容器如同豆子,共享同一环境但保持隔离性。其核心设计目标包括…...
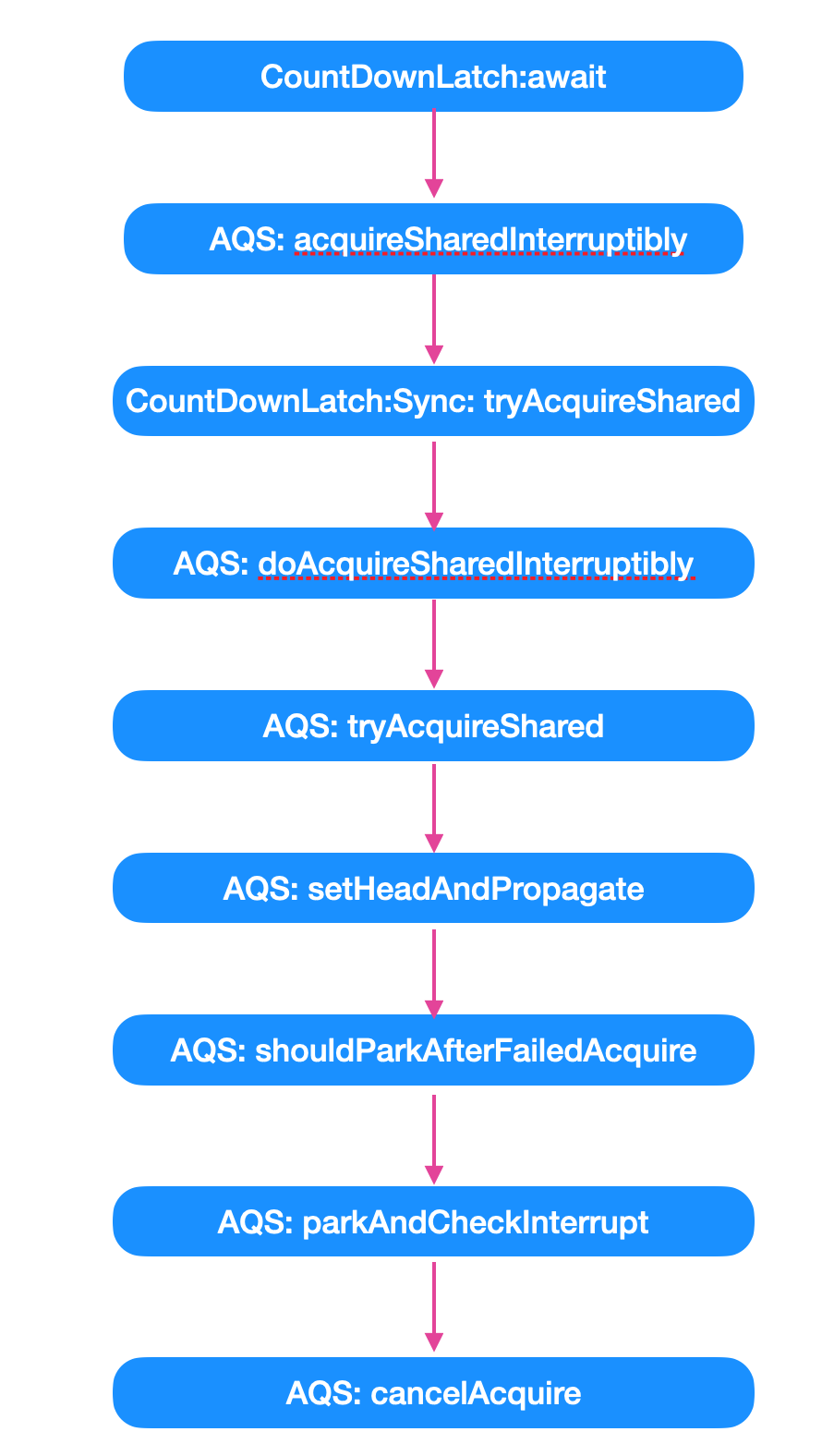
Java CountDownLatch 用法和源码解析
🧑 博主简介:CSDN博客专家,历代文学网(PC端可以访问:https://literature.sinhy.com/#/literature?__c1000,移动端可微信小程序搜索“历代文学”)总架构师,15年工作经验,…...

Unity引擎使用HybridCLR(华佗)热更新
大家好,我是阿赵。 阿赵我做手机游戏已经有十几年时间了。记得刚开始从做页游的公司转到去做手游的公司,在面试的时候很重要的一个点,就是会不会用Lua。使用Lua的原因很简单,就是为了热更新。 热更新游戏内容很重要。如果…...

深度学习进阶:神经网络优化技术全解析
文章目录 前言一、优化问题的本质1.1 目标1.2 挑战 二、梯度下降优化算法2.1 基础SGD2.2 动量法2.3 Adam优化器 三、正则化技术3.1 L2正则化3.2 Dropout 四、学习率调度4.1 为什么要调度?4.2 指数衰减4.3 ReduceLROnPlateau 五、实战优化:MNIST案例5.1 完…...

肿瘤检测新突破:用随机森林分类器助力医学诊断
前言 你有没有想过,科技能不能在肿瘤检测中发挥巨大的作用?别着急,今天我们将带你走进一个“聪明”的世界,通过随机森林分类器进行肿瘤检测。对,你没听错,机器学习可以帮助医生更快、更准确地判断肿瘤是良性还是恶性,就像医生口袋里的“超级助手”一样,随时准备提供帮…...

DeepSeek学习 一
DeepSeek学习 一 一、DeepSeek是什么?二、Deepseek可以做什么?模型理解提问内容差异使用原则 模式认识三、如何提问?RTGO提示语结构CO-STAR提示语框架DeepSeek R1提示语技巧 总结 一、DeepSeek是什么? DeepSeek是一家专注通用人工…...

编程考古-Borland历史:《.EXE Interview》对Anders Hejlsberg关于Delphi的采访内容(上)
为了纪念Delphi在2002年2月14日发布的25周年(2020.2.12),这里有一段由.EXE杂志编辑Will Watts于1995年对Delphi首席架构师Anders Hejlsberg进行的采访记录。在这次采访中,Anders讨论了Delphi的设计与发展,以及即将到来的针对Windows 95的32位版本。 问: Delphi是如何从T…...

高并发之接口限流,springboot整合Resilience4j实现接口限流
添加依赖 <dependency><groupId>io.github.resilience4j</groupId><artifactId>resilience4j-spring-boot2</artifactId><version>1.7.0</version> </dependency><dependency><groupId>org.springframework.boot…...

电脑如何拦截端口号,实现阻断访问?
如果你弟弟喜欢玩游戏,你可以查询该应用占用的端口,结合以下方法即可阻断端口号,让弟弟好好学习,天天向上! 拦截端口可以通过防火墙和路由器进行拦截 ,以下是常用方法: 方法 1:使用…...

AI应用开发利器:NeuroAPI网关统一管理多模型调用与部署实战
1. 项目概述:一个面向AI应用开发的API网关最近在折腾AI应用开发的朋友,估计都绕不开一个头疼的问题:模型管理。今天想试试Claude,明天项目需要接入GPT-4,后天可能又要调用一个开源的Llama模型。每个模型都有自己的API地…...

北京明光云振铎数据科技Java面经
Nacos、OpenFeign、Gateway 三个组件的作用及协作流程首先:Nacos 主要负责服务注册发现和配置中心Gateway 作为统一网关入口,负责路由、鉴权、限流OpenFeign 负责服务之间的远程调用用户请求先进入 GatewayGateway 会先做 JWT 鉴权,比如校验 …...

声明式应用编排框架Planifest:云原生时代应用交付新范式
1. 项目概述:一个面向未来的声明式应用编排框架如果你和我一样,在云原生和自动化运维领域摸爬滚打了几年,就会深刻体会到“编排”这个词的分量。从早期的Shell脚本,到Ansible、Terraform,再到Kubernetes的YAML海洋&…...

Wand-Enhancer终极指南:3步免费解锁WeMod Pro高级功能的完整方案
Wand-Enhancer终极指南:3步免费解锁WeMod Pro高级功能的完整方案 【免费下载链接】Wand-Enhancer Advanced UX and interoperability extension for Wand (WeMod) app 项目地址: https://gitcode.com/gh_mirrors/we/Wand-Enhancer 还在为WeMod专业版的订阅费…...

可穿戴电子入门:基于CircuitPython与3D打印的LED发光皇冠制作全解
1. 项目概述与核心思路如果你和我一样,对把电子设备“穿”在身上这件事着迷,那么可穿戴电子项目绝对能带来无穷的乐趣。它不仅仅是把一块电路板缝进衣服里那么简单,而是将微控制器、灯光、传感器这些冰冷的电子元件,与柔软的织物、…...

技术团队的“信息透明”策略:报喜也报忧,反而更受信任
在软件测试领域,我们每天都在与“不确定性”打交道。一个隐藏的边界值、一次偶发的并发冲突、一个在特定机型上才能复现的诡异Bug,都足以让看似稳固的系统瞬间变得脆弱。然而,比起代码中的不确定性,更让测试团队感到无力的&#x…...

基于CRICKIT与CircuitPython的蛇形机器人避障项目实践
1. 项目概述与核心思路最近在捣鼓一个挺有意思的创客项目:用Adafruit的CRICKIT扩展板和CircuitPython,做一个能自己溜达、遇到障碍会躲开的蛇形机器人。这玩意儿听起来复杂,其实拆解开来,核心就是“感知-决策-执行”这个经典的控制…...

Go语言WebSocket服务器tocket:轻量级高性能实时通信方案
1. 项目概述:一个轻量级、高性能的WebSocket服务器 最近在折腾一个需要实时双向通信的物联网项目,传统的HTTP轮询方案在延迟和服务器开销上都不太理想,WebSocket自然就成了首选。在技术选型时,我习惯性地会去GitHub上搜罗一番&…...

Cursor编辑器深度美化:CSS注入与动态特效实现全解析
1. 项目概述:当代码编辑器拥有了“皮肤”与“特效”如果你和我一样,每天有超过8小时的时间是在代码编辑器里度过的,那么你一定理解一个顺眼、顺手、甚至有点“酷”的编辑环境意味着什么。它不仅仅是生产力的工具,更是我们开发者思…...

深圳市2026年打造人工智能先锋城市项目扶持计划申请指南
本项目扶持计划下设十个项目类别,均采用事后奖补类支持方式。1、申报单位需同时满足基础申报条件和专项申报条件。基础申报条件如下:(一)申报单位为在深圳市内(含深汕特别合作区)从事生产经营活动ÿ…...