5.39 综合案例2.0 - STM32蓝牙遥控小车4(体感控制)
综合案例2.0 - 蓝牙遥控小车4- 体感控制
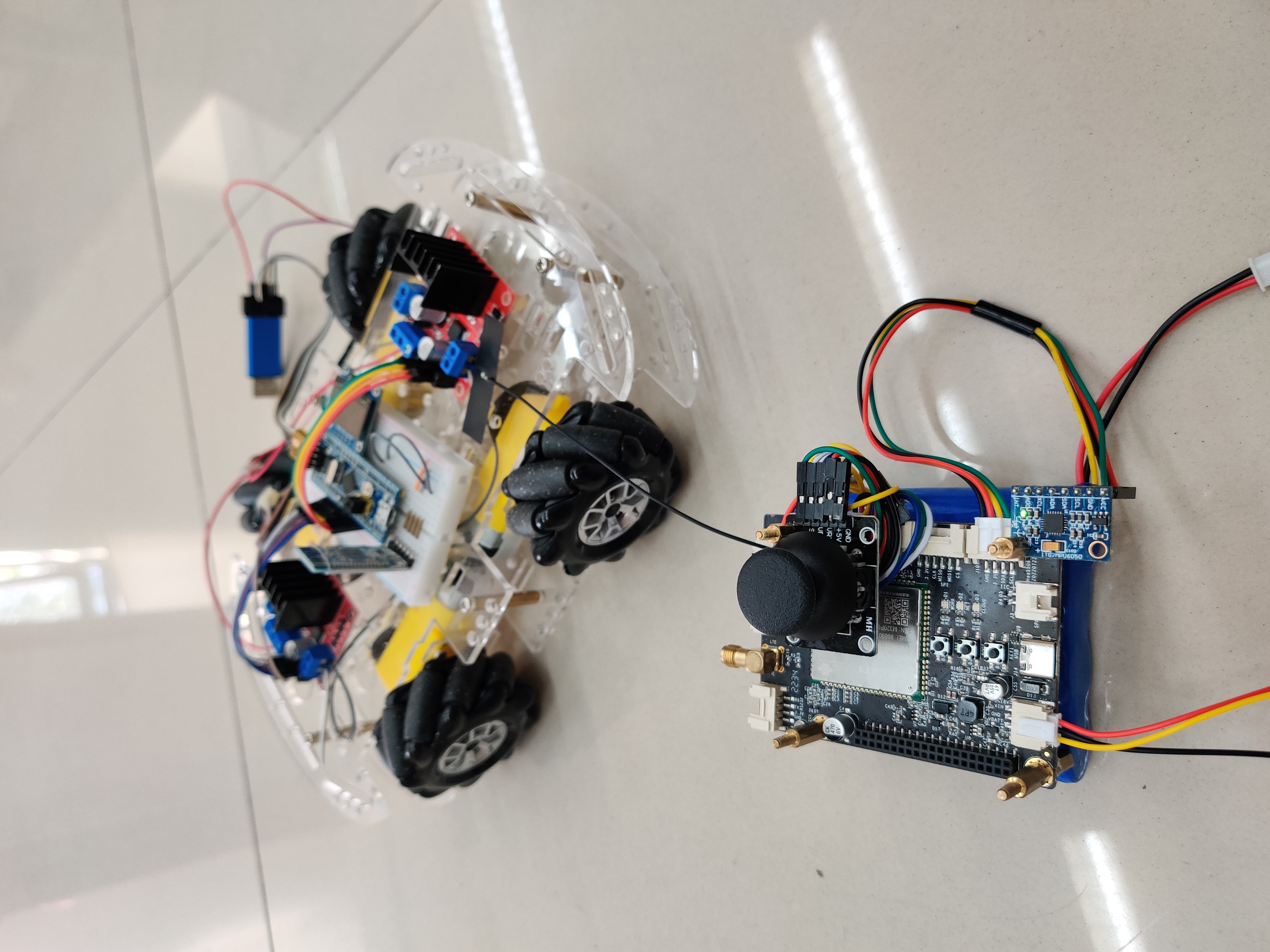
- 成品展示
- 案例说明
- 器件说明
- 小车连线
- 小车源码
- 遥控手柄
- 遥控器连线
- 遥控器代码
- 1.摇杆PS2模块说明
- 2.六轴MPU-6050说明
成品展示

案例说明
用STM32单片机做了一辆蓝牙控制的麦轮小车,分享一下小车的原理和制作过程。
控制部分分为手机APP,语音模块控制,Haas506开发板(遥感 + 体感)三种。
本文介绍Haas506(体感)控制的方法以及小车的制作。
器件说明
| 器件 | 数量 | 说明 |
|---|---|---|
| STM32F103C8T6单片机开发板 | 1 | 使用5V供电 |
| L298N电机驱动 | 2 | 只能控制电机正反转,要调节速度,每个模块使用4路PWM,案例总共需要8路PWM |
| MLT BT05蓝牙模块 | 1 | 与Haas506-320开发板进行蓝牙连接,需要5V供电 |
| 0.96寸OLED显示屏 | 1 | 用于显示蓝牙接收的消息 |
| 4电机加底座 | 1 | 普通TT小电机,需要5V以上供电 |
| 麦克纳姆轮 | 4 | |
| Haas506-320开发板 | 1 | 利用开发板自带的蓝牙连接并控制蓝牙小车 |
| PS2摇杆模块 | 1 | 检测摇杆x、y轴用于控制小车。 |
| MPU-6050六轴传感器 | 1 | 体感检测 |
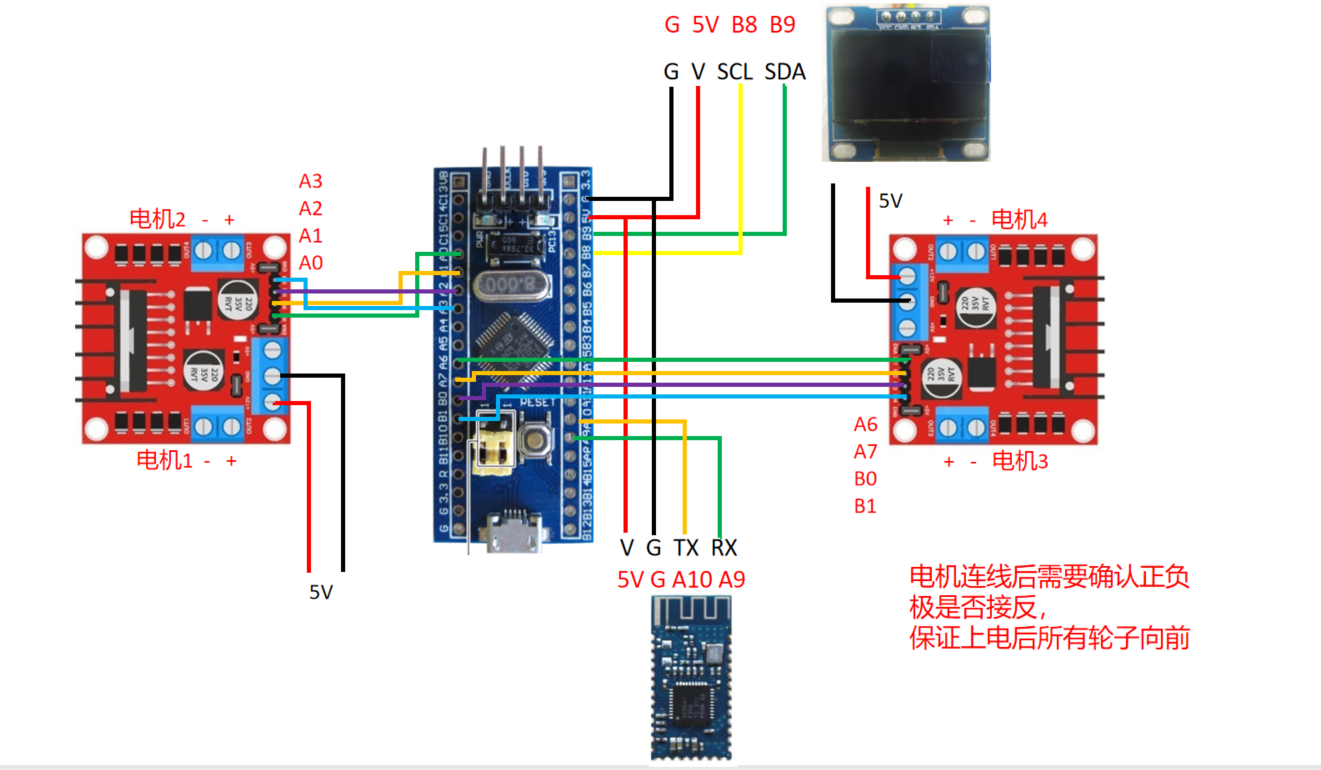
小车连线
- 器件连线
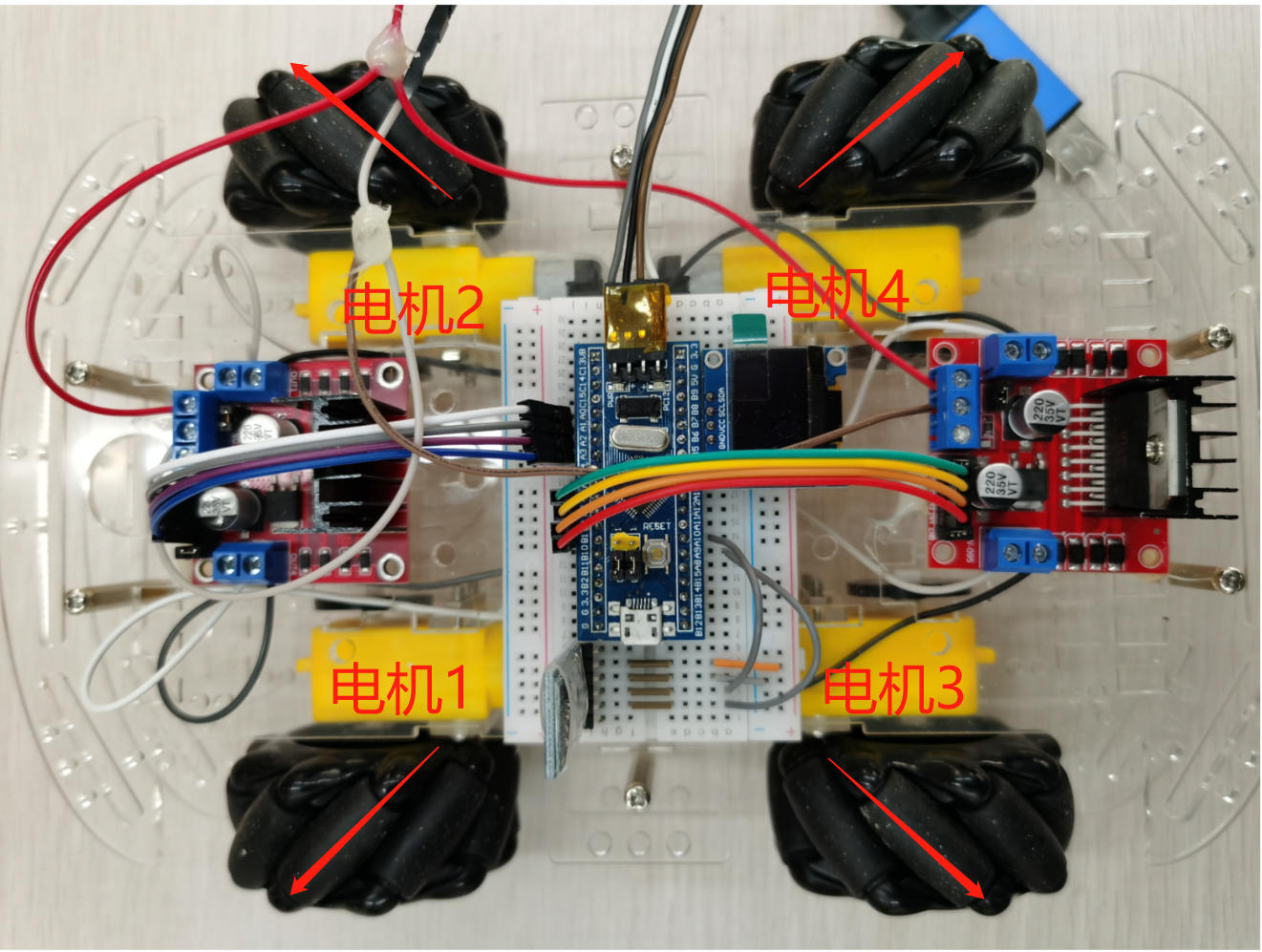
- 麦轮安装方向
小车源码
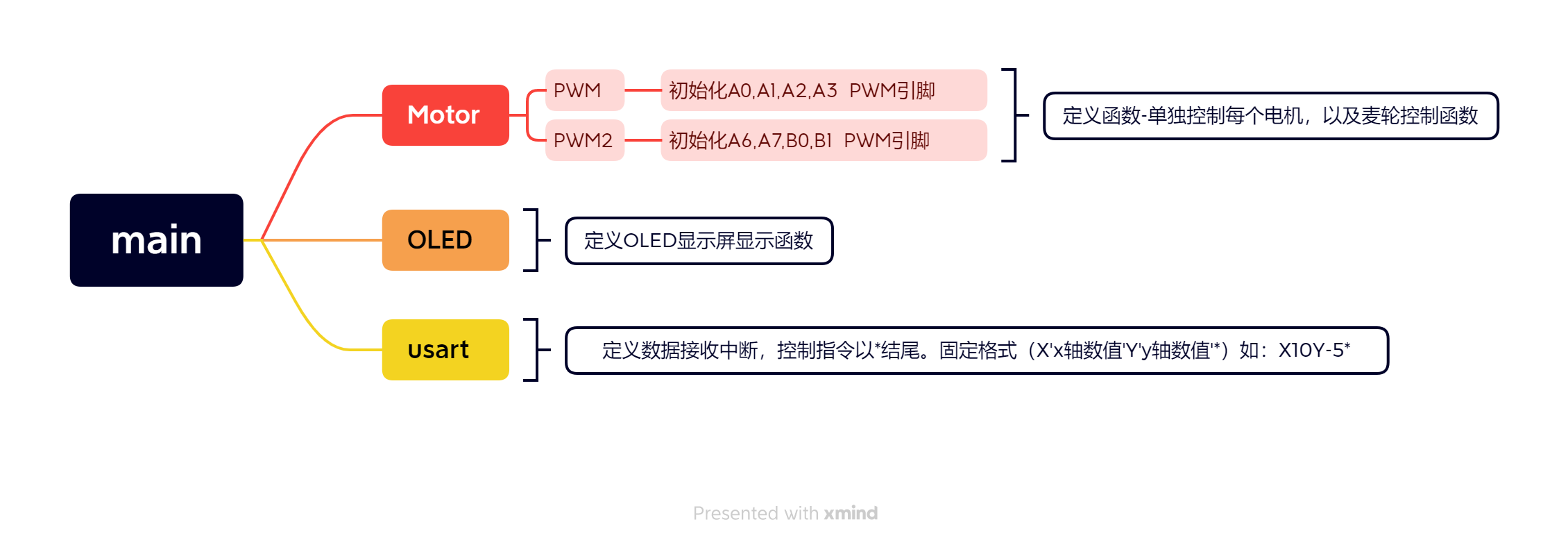
代码思路结构、
- 源码见STM32蓝牙遥控小车4(体感控制)
- L298N电机驱动模块只能控制电机正反转,原理:2路引脚分别控制电机正负极,正极高电平,负极置零,电机正传;反之反转。
- 为了控制小车速度,这里总共使用了8路PWM来控制每个 L298N电机驱动模块的引脚,每个电机使用2路PWM控制,如果需要正传,正极占空比调高,负极占空比调零。
遥控手柄
手柄包括两种模式(PS2遥杆 + 体感遥控),按开发板KEY键进行切换。
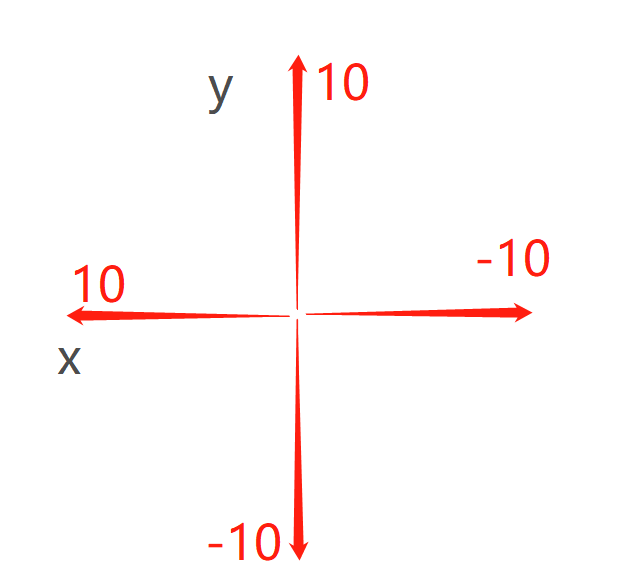
- ADC读取PS2摇杆模块的X、Y轴数据,将ADC数据转化为范围在(-10~10)内的数据,用于控制小车的速度与方向。
- 体感遥控使用MPU-6050六轴模块检测X,Y轴维度的倾斜数值,也需要控制在(-10~10)的范围内。
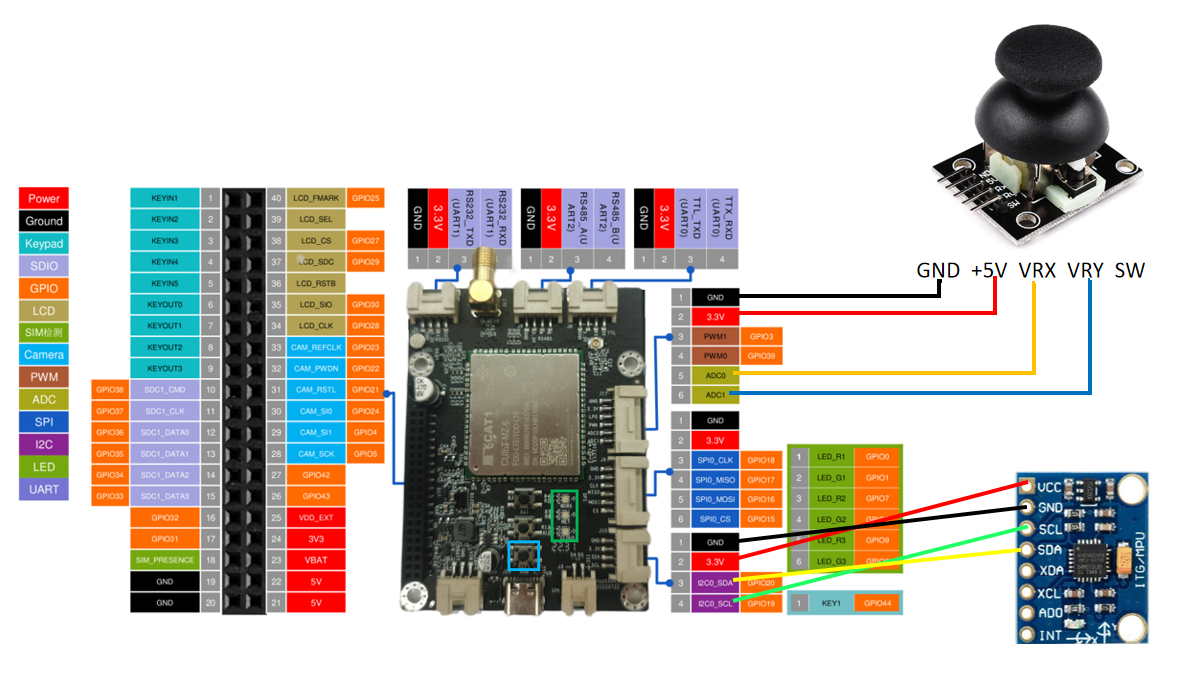
遥控器连线
用ADC采集PS2摇杆模块的模拟信号值
用I2C获取六轴传感器X,Y轴维度的数值
遥控器代码
代码见STM32蓝牙遥控小车4(体感控制)
- 代码需要更改蓝牙名称。Haas506作为主机去扫描蓝牙小车,搜索蓝牙名称进行连接。

1.摇杆PS2模块说明
- ADC采集的原始数据最大值3200左右,需要转化为如下数值范围。如果代码数值有误差需自行调整。
- 坐标最后输出格式必须以 ‘ * ’作为结尾举例 X10Y-5*
2.六轴MPU-6050说明
- MPU6050是InvenSense公司推出的全球首款整合性6轴运动处理组件,内带3轴陀螺仪和3轴加速度传感器。可以检测X,Y,Z三个维度的偏转,并且可以检测发生偏转的快慢。案例只使用了X与Y轴两个维度的偏转。
- STM32小车的代码是固定的,摇杆的数据与六轴的数据通过同一个蓝牙发送,需要保持数据格式一致。安装六轴模块时也要注意X,Y轴坐标方向与PS2摇杆模块也要一致。
- 对获取的X,Y轴数值取整。并且以 X10Y-5* 格式输出。
相关文章:
5.39 综合案例2.0 - STM32蓝牙遥控小车4(体感控制)
综合案例2.0 - 蓝牙遥控小车4- 体感控制成品展示案例说明器件说明小车连线小车源码遥控手柄遥控器连线遥控器代码1.摇杆PS2模块说明2.六轴MPU-6050说明成品展示 案例说明 用STM32单片机做了一辆蓝牙控制的麦轮小车,分享一下小车的原理和制作过程。 控制部分分为手机…...
Scala之面向对象
目录 Scala包: 基础语法: Scala包的三大作用: 包名的命名规范: 写包的好处: 包对象: 导包说明: 类和对象: 定义类: 封装: 构造器: 主从…...
深度学习目标检测项目实战(四)—基于Tensorflow object detection API的骨折目标检测及其界面运行
深度学习目标检测项目实战(四)—基于Tensorflow object detection API的骨折目标检测及其界面运行 使用tensorflow object detection进行训练检测 参考原始代码:https://github.com/tensorflow/models/tree/master/research 我用的是1.x的版本 所以环境必须有gpu版…...

嵌入式工程师如何快速的阅读datasheet的方法
目录 ▎从项目角度来看datasheet ▎各取所需 ▎最后 Datasheet(数据手册)的快速阅读能力,是每个工程师都应该具备的基本素养。 无论是项目开始阶段的选型还是后续的软硬件设计,到后期的项目调试,经常有工程师对着英…...
合约广告)
(三)合约广告
1. 广告位(CPT)合约 系统:广告排期系统 网站把某一个广告位卖给广告商,这段时间归广告商所有,到点了下线 (1)流量选择的维度:时间段、地域等 (2)典型场景…...

【Android -- 软技能】分享一个学习方法
前言 很多人都想通过学习来提升自己,但是,可能因为两个问题,阻碍了自己的高效提升: 学什么? 怎么学? 本文将从自己的学习实践出发,针对这两个问题,给出自己的一套学习流程。 1…...
)
Python-DQN代码阅读(10)
目录 1.代码 1.1 代码阅读 1.2 代码分解 1.2.1 f open("experiments/" str(env.spec.id) "/performance.txt", "a") 1.2.2 f.write(str(ep) " " str(time_steps) " " str(episode_rewards) " " str(…...
MongoDB入坑
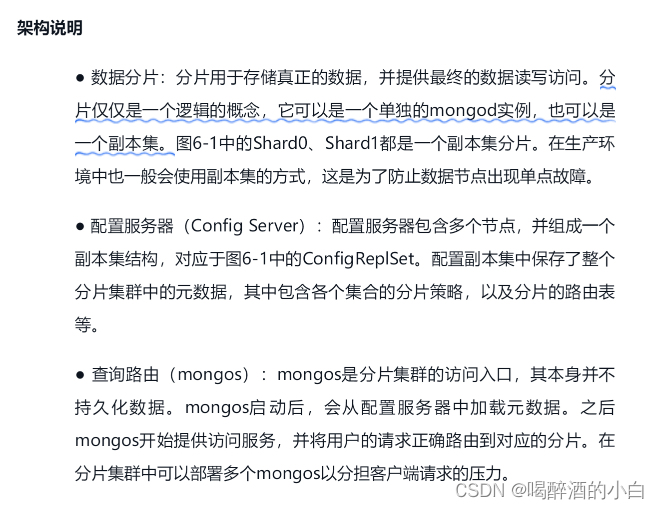
MongoDB入坑一、体系架构1、简介2、MongoDB VS RDBMS3、文件4、体系结构二、权限管理1、开启2、角色三、存储引擎四、备份 & 恢复五、高可用0、主从复制1、副本集2、分片一、体系架构 1、简介 DBMS No.5;NoSQL Document No.1 1)BSON BSON(Binary …...
【论文总结】针对操作系统级虚拟化的抽象资源攻击
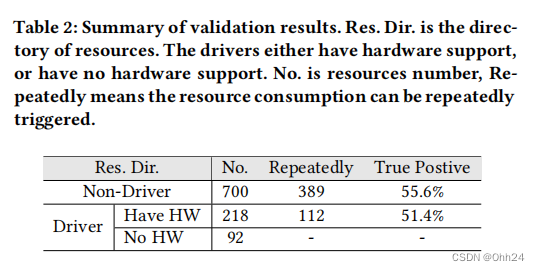
介绍 这是一篇来自2021CCS的论文,作者有Nanzi Yang, Wenbo Shen, Jinku Li, Yutian Yang, Kangjie Lu, Jietao Xiao, Tianyu Zhou, Chenggang Qin, Wang Yu, Jianfeng Ma, Kui Ren。 概述 本文的贡献如下: 新的攻击面:作者揭示了一个影响操…...

C# 提取 PDF 文档中的文本
C# .Net 使用 IText7 从PDF文件中提取出所有文本内容 【文 / 张赐荣】 首先在 Nuget 包管理器中,安装"itext7" 和 "itext7.font-asian"。 如果不安装 "itext7.font-asian" PDF 文件中有非Unicode编码的字符,将会抛出运行时异常:iText.IO.Excep…...
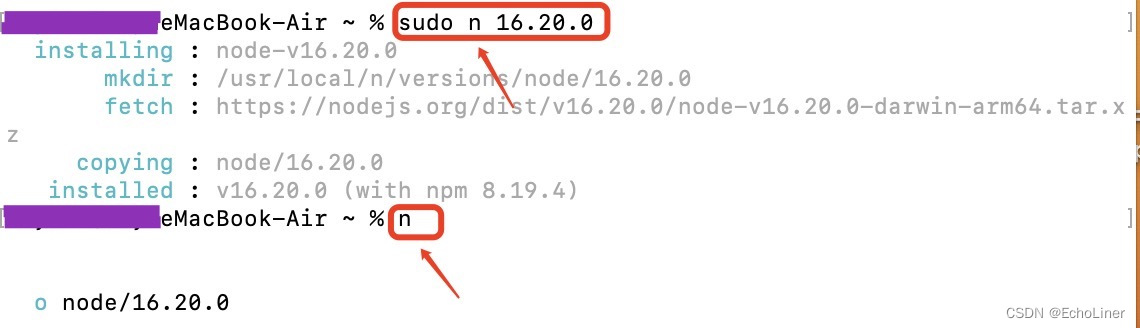
mac如何升级node版本、切换node版本
一、mac如何升级node版本 当前官网稳定版本是18.15.0 所以我从v14.17.4升级到v18.15.0 二、mac如何切换node版本 切换到16.20.0版本 三、这里是用node.js的多版本管理器n来升级和切换的,命令如下: 1、sudo npm cache clean -f //清除node.js的cache …...

一位大专学历的女程序员要求月薪25K,学历重要吗?来看看面试过程
“请提供一份完整的简历,以便我审查。从您的简历中,我感觉您写得还不错。方便的话,您可以自我简单介绍一下吗?“ ”好的,我叫李娟,拥有大专学位,目前正在寻找一份Java开发架构师的工作岗位。“…...
ESP32驱动1.28寸GC9A01播放视频(一、视频分辨率的调整和视频格式的转换)
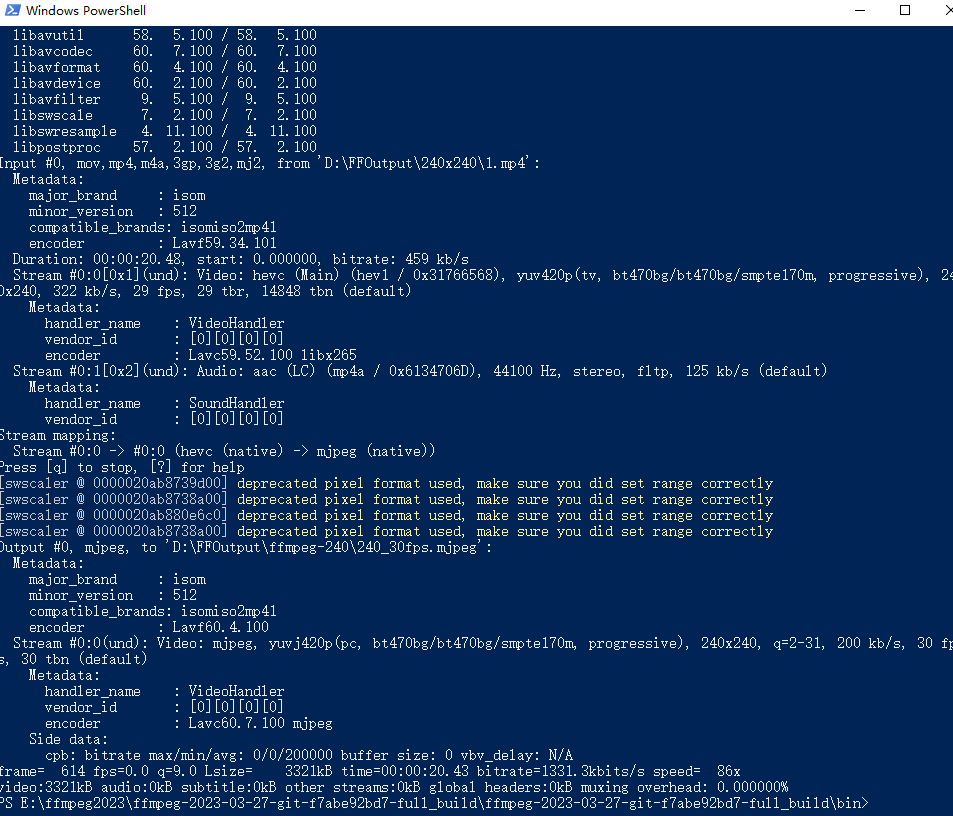
ESP32驱动1.28寸GC9A01播放视频(一、视频分辨率的调整和视频格式的转换)播放前准备转换视频分辨率用FFmpeg将.MP4转换为.mjpeg格式FFmpeg的win10环境搭建FFmpeg的下载环境变量的搭建MP4转换成mjpeg格式总结播放前准备 1.28寸GC9A01屏幕的分辨率是240x24…...

epoll的LT模式(水平触发)和ET模式(边沿触发)
前言 epoll的触发模式是个引发讨论非常多的话题,网络上这方面总结的文章也很多,首先从名字上就不是很统一,LT模式常被称为水平触发、电平触发、条件触发,而ET模式常被称为边缘触发、边沿触发等,这些都是从英文翻译过来…...

Java基础面试20题
Java的八大基本数据类型 答:可以分4种类型:布尔类型(boolean),字符类型(char),浮点类型(double,float),整型(byte,short,int, long)。 String,StringBuffer与StringBuilder的区别? …...

Java面向对象封装
目录 封装的概念 封装具体实现步骤 示例代码如下 封装具体语法 封装的概念 Java封装是一种面向对象的编程方法,它的主要思想是将类的内部细节(包括数据和方法)隐藏起来,对外只提供公共的访问接口,从而保证了程序的安全性和稳定性。 封装具体实现步骤 1、声明类的成…...
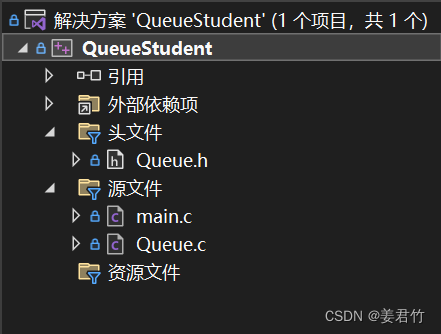
队列实现图书信息管理(C语言)
文章目录Queue.hmain.cQueue.c用队列实现一个图书信息管理,这里放一下有哪些文件。(ps:我之前写的是学生信息管理,但是有人说我们的作业是写图书,就该了下内容,没有改文件名)队列是用链表实现的…...
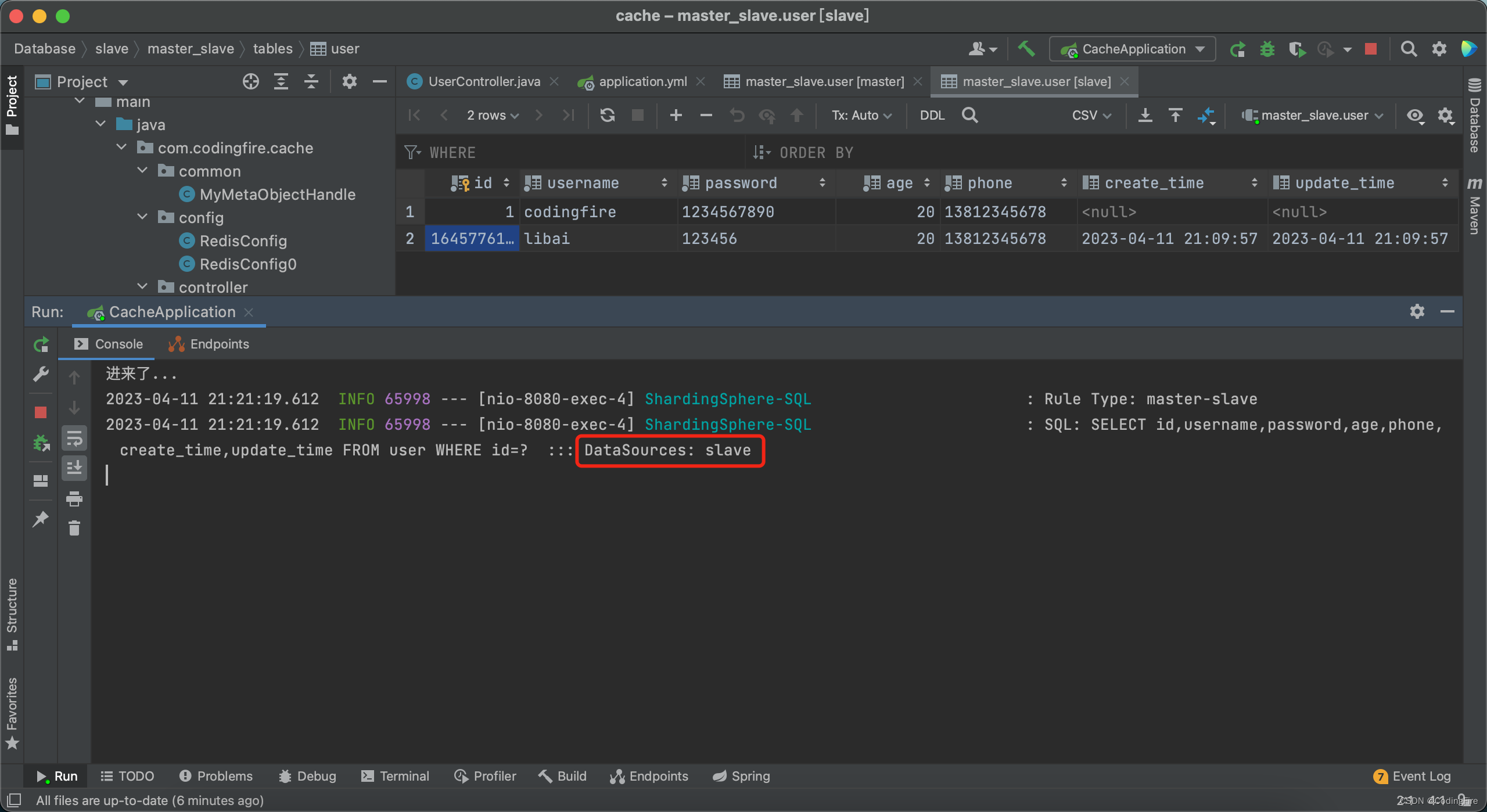
Java开发 - 读写分离初体验
前言 上一篇中,我们介绍了主从复制,相信学过的小伙伴已经能够很好的掌握主从复制的技术,实际上也并没有那么难,虽然没有讲一主多从,多主多从的配置,但是从一主一从的配置中也很容易联想到该怎么配置&#…...

图文详解CAN Log文件 - ASC文件格式
目录 1 CAN Log文件 -- ASC文件格式 1.1 Header 1.2 版本编号 1.3 经典CAN网络中的描述 1.3.1 经典CAN Standard标准帧的描述 1.3.2 经典CAN Extended扩展帧的描述 1.3.3 CAN Remote远程帧的描述 1.3.4 CAN Error错误帧的描述 1.4 CANFD网络中的描述 1.4.1 经典CAN S…...
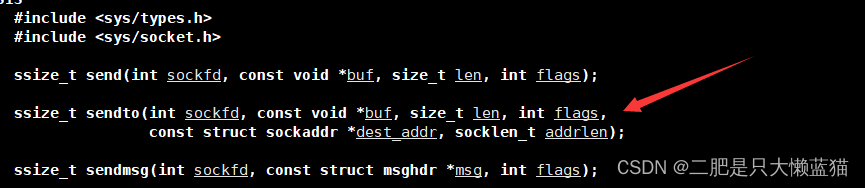
网络编程套接字(一)
学习任务: 我们先来认识端口号,区分好主机IP和端口号的区别,以及涉及到进程PID和端口号的区别。 然后简单认识一下TCP协议和UDP协议,这两个协议都是传输层的。接着了解什么是网络字节序,它有什么作用。然后是网络编程的…...

终极指南:如何用BookGet快速下载全球50+图书馆古籍资源
终极指南:如何用BookGet快速下载全球50图书馆古籍资源 【免费下载链接】bookget bookget 数字古籍图书下载工具。 项目地址: https://gitcode.com/gh_mirrors/bo/bookget BookGet是一款强大的数字古籍图书下载工具,支持全球50多个知名数字图书馆的…...

声明式工作流编排框架:从计划到执行的自动化实践
1. 项目概述:从“计划清单”到“框架”的蜕变如果你和我一样,在职业生涯中经历过从零到一构建复杂应用,或者维护过多个技术栈各异、需求多变的项目,那你一定对“计划”和“清单”这两个词深有感触。我们每天都在做计划,…...

MobaXterm远程桌面实战:在Ubuntu上配置与连接RDP服务
1. 为什么选择MobaXterm连接Ubuntu远程桌面 作为一名常年和Linux服务器打交道的开发者,我深知纯命令行操作有时会遇到效率瓶颈。特别是当需要处理图形界面应用或者进行复杂配置时,SSH终端就显得力不从心了。这时候,RDP远程桌面协议就成了救命…...

Ubuntu 22.04 下配置 Arduino IDE 2.x:从安装到第三方库的完整避坑指南
1. 准备工作:下载Arduino IDE 2.x 在Ubuntu 22.04上配置Arduino开发环境,第一步自然是获取官方IDE。我推荐直接从Arduino官网下载最新版本,避免使用老旧软件包带来的兼容性问题。打开浏览器访问arduino.cc/en/software,你会看到两…...

揭秘高效磁盘空间管理:专业磁盘分析工具WinDirStat完全指南
揭秘高效磁盘空间管理:专业磁盘分析工具WinDirStat完全指南 【免费下载链接】windirstat WinDirStat is a disk usage statistics viewer and cleanup tool for Microsoft Windows 项目地址: https://gitcode.com/gh_mirrors/wi/windirstat 你是否曾为Window…...

LibreCAD符号库创建终极指南:快速构建您的专业CAD图库
LibreCAD符号库创建终极指南:快速构建您的专业CAD图库 【免费下载链接】LibreCAD LibreCAD is a cross-platform 2D CAD program. It can read DXF and write DXF/PDF/SVG files, with basic support for DWG reading. It supports point/line/circle/ellipse/parab…...

Visual C++运行库终极解决方案:一站式修复所有Windows程序依赖问题
Visual C运行库终极解决方案:一站式修复所有Windows程序依赖问题 【免费下载链接】vcredist AIO Repack for latest Microsoft Visual C Redistributable Runtimes 项目地址: https://gitcode.com/gh_mirrors/vc/vcredist 你是否经常遇到"缺少msvcp140.…...

终极魔兽争霸3兼容性修复指南:WarcraftHelper让你的经典游戏重获新生
终极魔兽争霸3兼容性修复指南:WarcraftHelper让你的经典游戏重获新生 【免费下载链接】WarcraftHelper Warcraft III Helper , support 1.20e, 1.24e, 1.26a, 1.27a, 1.27b 项目地址: https://gitcode.com/gh_mirrors/wa/WarcraftHelper 还在为《魔兽争霸III…...

基于DocFX与CI/CD构建.NET私有NuGet包文档一体化管理方案
1. 项目概述与核心价值最近在整理团队内部的.NET技术资产时,我重新审视了一个看似简单但极其重要的仓库:abellobm3681/nuget-docs。这名字乍一看,可能很多人会以为又是一个NuGet官方文档的镜像或者翻译项目。但如果你深入进去,会发…...

UltimateStack:彻底解决Minecraft物品堆叠限制的终极指南
UltimateStack:彻底解决Minecraft物品堆叠限制的终极指南 【免费下载链接】UltimateStack A Minecraft mod,can modify ur item MaxStackSize (more then 64) 项目地址: https://gitcode.com/gh_mirrors/ul/UltimateStack 你是否曾经在Minecraft中为物品堆叠…...