【算法题解】24. 模拟机器人行走
这是一道 中等难度 的题
https://leetcode.cn/problems/walking-robot-simulation/description/
题目
机器人在一个无限大小的 XY 网格平面上行走,从点 (0, 0) 处开始出发,面向北方。该机器人可以接收以下三种类型的命令 commands :
- -2 :向左转 90 度
- -1 :向右转 90 度
- 1 <= x <= 9 :向前移动 x 个单位长度
在网格上有一些格子被视为障碍物 obstacles 。第 i 个障碍物位于网格点 obstacles[i] = (xi, yi) 。
机器人无法走到障碍物上,它将会停留在障碍物的前一个网格方块上,但仍然可以继续尝试进行该路线的其余部分。
返回从原点到机器人所有经过的路径点(坐标为整数)的最大欧式距离的平方。(即,如果距离为 5 ,则返回 25 )
注意:
- 北表示 +Y 方向。
- 东表示 +X 方向。
- 南表示 -Y 方向。
- 西表示 -X 方向。
示例 1:
输入:commands = [4,-1,3], obstacles = []
输出:25
解释: 机器人开始位于 (0, 0): 1. 向北移动 4 个单位,到达 (0, 4) 2. 右转 3. 向东移动 3 个单位,到达 (3, 4) 距离原点最远的是 (3, 4) ,距离为 32 + 42 = 25
示例 2:
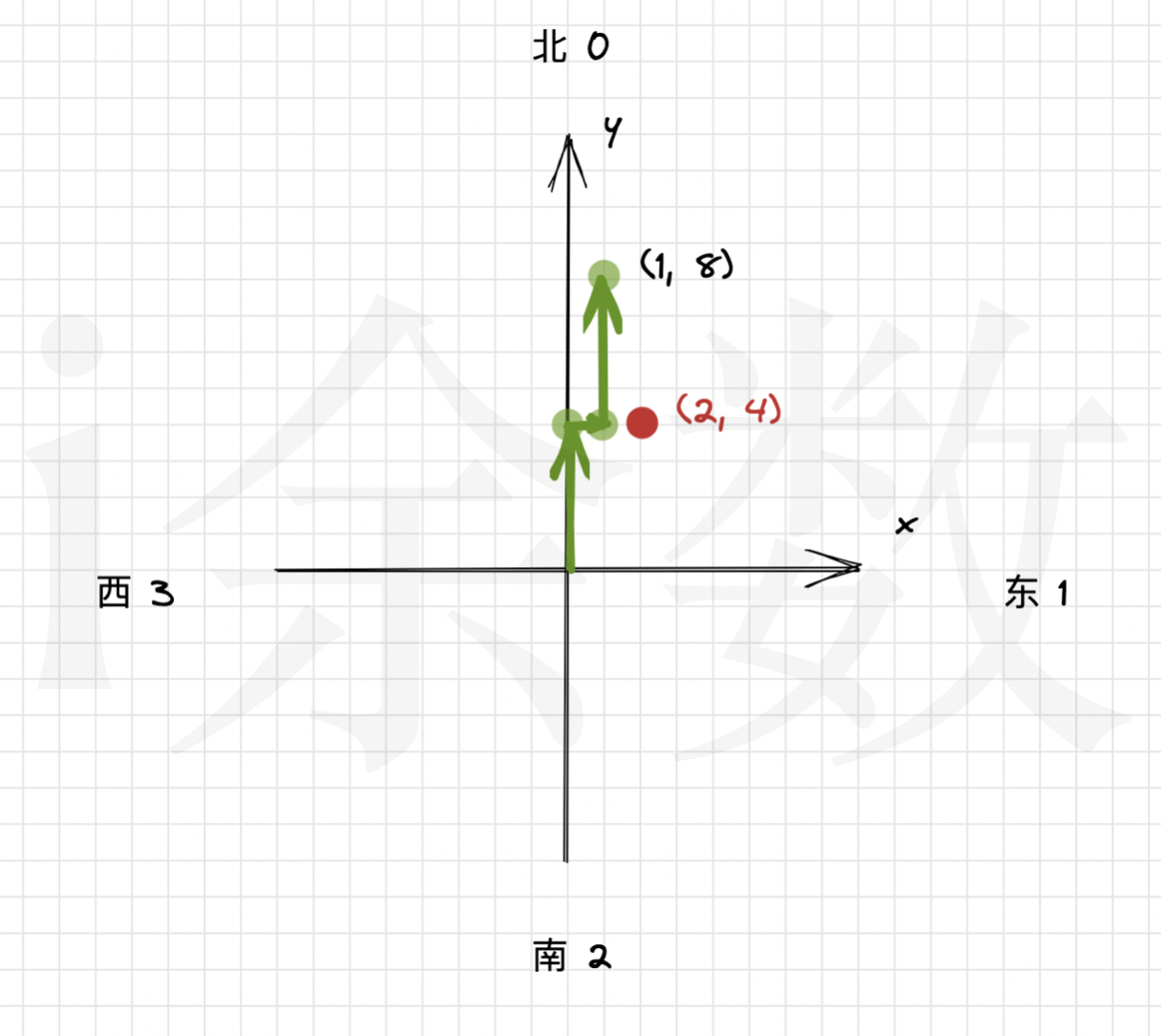
输入:commands = [4,-1,4,-2,4], obstacles = [[2,4]]
输出:65
解释:机器人开始位于 (0, 0):
1. 向北移动 4 个单位,到达 (0, 4)
2. 右转
3. 向东移动 1 个单位,然后被位于 (2, 4) 的障碍物阻挡,机器人停在 (1, 4)
4. 左转
5. 向北走 4 个单位,到达 (1, 8) 距离原点最远的是 (1, 8) ,距离为 12 + 82 = 65
提示:
- 1<=commands.length<=1041 <= commands.length <= 10^41<=commands.length<=104
- commands[i] is one of the values in the list [-2,-1,1,2,3,4,5,6,7,8,9].
- 0<=obstacles.length<=1040 <= obstacles.length <= 10^40<=obstacles.length<=104
- −3∗104<=xi,yi<=3∗104-3 * 104 <= xi, yi <= 3 * 10^4−3∗104<=xi,yi<=3∗104
- 答案保证小于 2312^{31}231
题解思路
这道题理解起来其实很简单,就是求机器人走过的点位当中离原点(0,0)(0,0)(0,0)最远的点(x,y)(x,y)(x,y),并计算其欧式距离的平方。
具体实现逻辑为: 循环遍历命令行数组 commands:
- 如果遇到
-2和-1就切换机器人方向。 - 如果遇到
1 <= x(前进步数) <= 9按照当前方向一步一步前进。- 如果将要前进到的位置
(x, y)在给定的障碍物obstacles数组中,就停下不能走了,也就是直接退出然后执行下一个命令command。 - 否则每走一步,就计算一下
ans = Math.max(ans, x2 + y2)。
- 如果将要前进到的位置
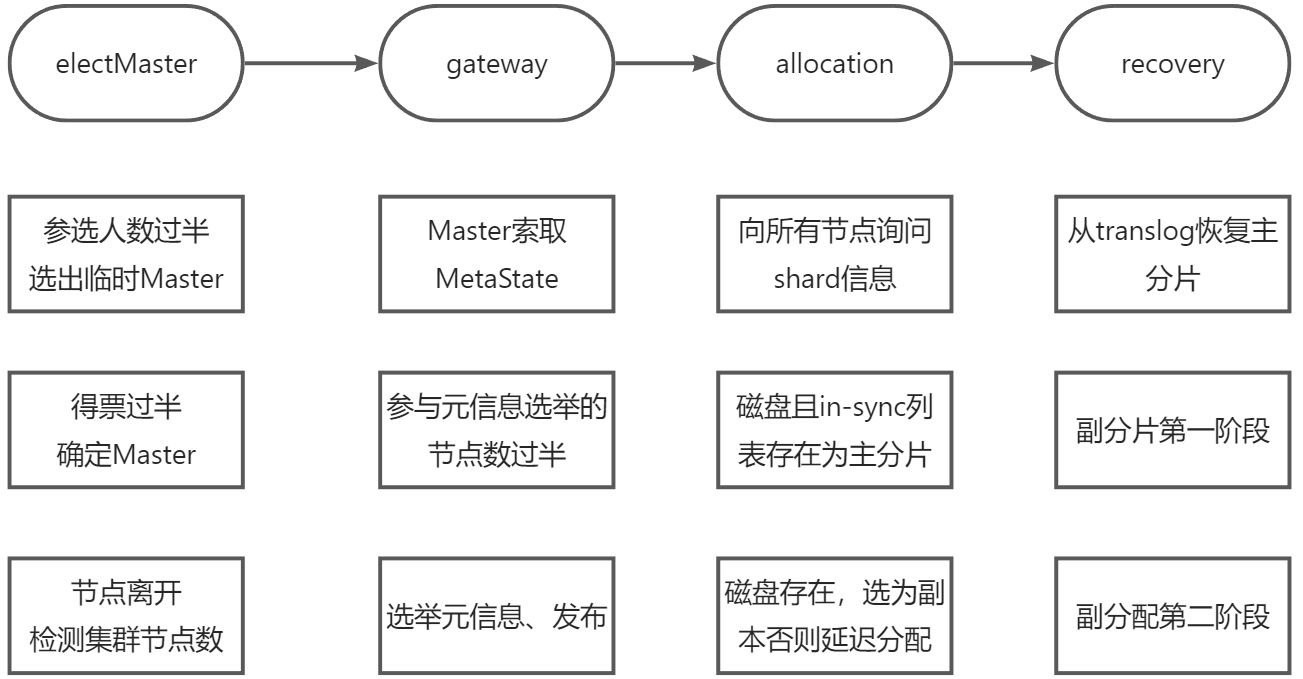
示例2 图示:
代码实现的难点在于方向的切换,这一类题目我们统一采用 方向数组 来处理。
我们定义当前方向为dir,可取值为 {0,1,2,3} ;分别代表 {北,东,南,西} 。见上图。
那么当机器人遇到改变方向的命令时,我们直接修改dir的值即可:
右转:加一,dir = (dir + 1) % 4。
左转:减一,dir = (dir - 1 + 4) % 4。因为dir - 1可能为负,所以先加4。
然后再分别在x 和 y 两个方向上定义两个方向数组,以Java为例:
int[] dx = {0, 1, 0, -1};
int[] dy = {1, 0, -1, 0};
- 方向为北(0)时:每次前进 x 不变,y 加一。
- 方向为东(1)时:每次前进 x 加一,y 不变。
- 方向为南(2)时:每次前进 x 不变,y 减一。
- 方向为西(3)时:每次前进 x 减一,y 不变。
当遇到行走命令时,每前进一步,其位置变换就应该是(x + dx[dir], y + dy[dir])。
另外需要注意的一点是,如果每次判断(x,y)(x, y)(x,y)是不是障碍物点都从 obstaclesobstaclesobstacles 数组找一次的话,那么光查找障碍点的时间复杂度就已经是 O(mn)O(mn)O(mn)了, 其中 mmm 为机器人行走的步数,nnn 为障碍物的个数。我们可以提前以O(n)O(n)O(n)的时间复杂度,将障碍物点初始化到一个哈希表当中,然后我们就可以O(1)O(1)O(1)的时间复杂度来判断一个点是不是障碍物了,具体实现见代码。
代码实现
Java代码实现
class Solution {private Set<Integer> obstacleSet = new HashSet<>();private int factor = 100000;public int robotSim(int[] commands, int[][] obstacles) {genObstacleSet(obstacles);// 当前方向,北:0, 东:1,南:2, 西:3int dir = 0;// 方向数组int[] dx = {0, 1, 0, -1};int[] dy = {1, 0, -1, 0};// 机器人位置int x = 0, y = 0; int ans = 0;for(int command : commands){if(command == -2){dir = (dir + 3) % 4;continue;}if(command == -1){dir = (dir + 1) % 4;continue;}for(int i = 0; i < command; i++){// 如果遇到障碍物,停止在当前位置if(isObstacle(x + dx[dir], y + dy[dir])){break;}x += dx[dir];y += dy[dir];ans = Math.max(ans, x * x + y * y);}}return ans;}// 判断是否是障碍物private boolean isObstacle(int x, int y){return obstacleSet.contains(factor * x + y);}private void genObstacleSet(int[][] obstacles){for(int[] obstacle : obstacles){obstacleSet.add(factor * obstacle[0] + obstacle[1]);}}
}
Go代码实现
func robotSim(commands []int, obstacles [][]int) int {// 初始化障碍点位obstacleMap := make(map[[2]int]bool)for _, obstacle := range obstacles {obstacleMap[[2]int{obstacle[0], obstacle[1]}] = true}// 当前方向dir := 0// 方向数组dx, dy := []int{0, 1, 0, -1}, []int{1, 0, -1, 0}// 当前位置x, y := 0, 0// 答案ans := 0for _, command := range commands {if command == -2 {dir = (dir + 3) % 4continue}if command == -1 {dir = (dir + 1) % 4continue}for i := 0; i < command; i++ {// 遇到障碍物if _, ok := obstacleMap[[2]int{x + dx[dir], y + dy[dir]}]; ok {break;}x += dx[dir]y += dy[dir]ans = max(ans, x * x + y * y)}}return ans}func max(a int, b int) int {if a > b {return a}return b
}
复杂度分析
-
时间复杂度:O(m+n+k)O(m + n + k)O(m+n+k), 其中 mmm 为机器人行走的步数,nnn 为障碍物的个数,kkk为转换方向的次数。
-
空间复杂度:O(n)O(n)O(n), nnn 为障碍物的个数。
相关文章:
【算法题解】24. 模拟机器人行走
这是一道 中等难度 的题 https://leetcode.cn/problems/walking-robot-simulation/description/ 题目 机器人在一个无限大小的 XY 网格平面上行走,从点 (0, 0) 处开始出发,面向北方。该机器人可以接收以下三种类型的命令 commands : -2 &am…...
PyTorch 深度学习实战 |用 TensorFlow 训练神经网络
为了更好地理解神经网络如何解决现实世界中的问题,同时也为了熟悉 TensorFlow 的 API,本篇我们将会做一个有关如何训练神经网络的练习,并以此为例,训练一个类似的神经网络。我们即将看到的神经网络,是一个预训练好的用…...

【进阶C语言】静态版通讯录的实现(详细讲解+全部源码)
前言 📕作者简介:热爱跑步的恒川,正在学习C/C、Java、Python等。 📗本文收录于C语言进阶系列,本专栏主要内容为数据的存储、指针的进阶、字符串和内存函数的介绍、自定义类型结构、动态内存管理、文件操作等࿰…...

【JavaWeb】后端(Maven+SpringBoot+HTTP+Tomcat)
目录一、Maven1.什么是Maven?2.Maven的作用?3.介绍4.安装5.IDEA集成Maven6.IDEA创建Maven项目7.IDEA导入Maven项目8.依赖配置9.依赖传递10.依赖范围11.生命周期二、SpringBoot1.Spring2.SpringBoot3.SpringBootWeb快速入门二、HTTP1.HTTP-概述2.HTTP-请求协议3.HTTP-响应协议…...

面试官:准备了一些springboot相关的面试题,快来看看吧
文章目录摘要Spring Boot 中的注解 RestController 和 Controller 有什么区别?Spring Boot 中如何处理异常?使用 ExceptionHandler 注解处理特定类型的异常:使用 ExceptionHandler 注解可以将特定类型的异常映射到一个处理方法上,…...
原子的波尔模型、能量量子化、光电效应、光谱实验、量子态、角动量
一. 卢瑟福模型 1908年,卢瑟福用α粒子继续轰击金箔,发现有极少数粒子,发生了非常大的偏移。而这对于当时主流的葡萄干面包模型理论分析是相悖的。 原子可看成由带正电的原子核和围绕核运动的一些电子组成,原子中心的原子核带正…...
【如何使用Arduino控制WS2812B可单独寻址的LED】
【如何使用Arduino控制WS2812B可单独寻址的LED】 1. 概述2. WS2812B 发光二极管的工作原理3. Arduino 和 WS2812B LED 示例3.1 例 13.2 例 24. 使用 WS2812B LED 的交互式 LED 咖啡桌4.1 原理图4.2 源代码在本教程中,我们将学习如何使用 Arduino 控制可单独寻址的 RGB LED 或 …...
)
计算机基本知识扫盲(持续更)
计算机基本知识扫盲Q:硬盘和磁盘有什么区别?A:硬盘和磁盘都是存储数据的设备。磁盘指的是存储数据的圆形或者是方形的光盘,但是硬盘则是指机械式硬盘和固态硬盘。磁盘一般用于存储少量数据,例如软件安装文件、音乐和电…...
学习大数据需要什么语言基础
Python易学,人人都可以掌握,如果零基础入门数据开发行业的小伙伴,可以从Python语言入手。 Python语言简单易懂,适合零基础入门,在编程语言排名上升最快,能完成数据挖掘、机器学习、实时计算在内的各种大数…...
ElasticSearch——详细看看ES集群的启动流程
参考:一起看看ES集群的启动流程 本文主要从流程上介绍整个集群是如何启动的,集群状态如何从Red变成Green,然后分析其他模块的流程。 这里的集群启动过程指集群完全重启时的启动过程,期间要经历选举主节点、主分片、数据恢复等重…...
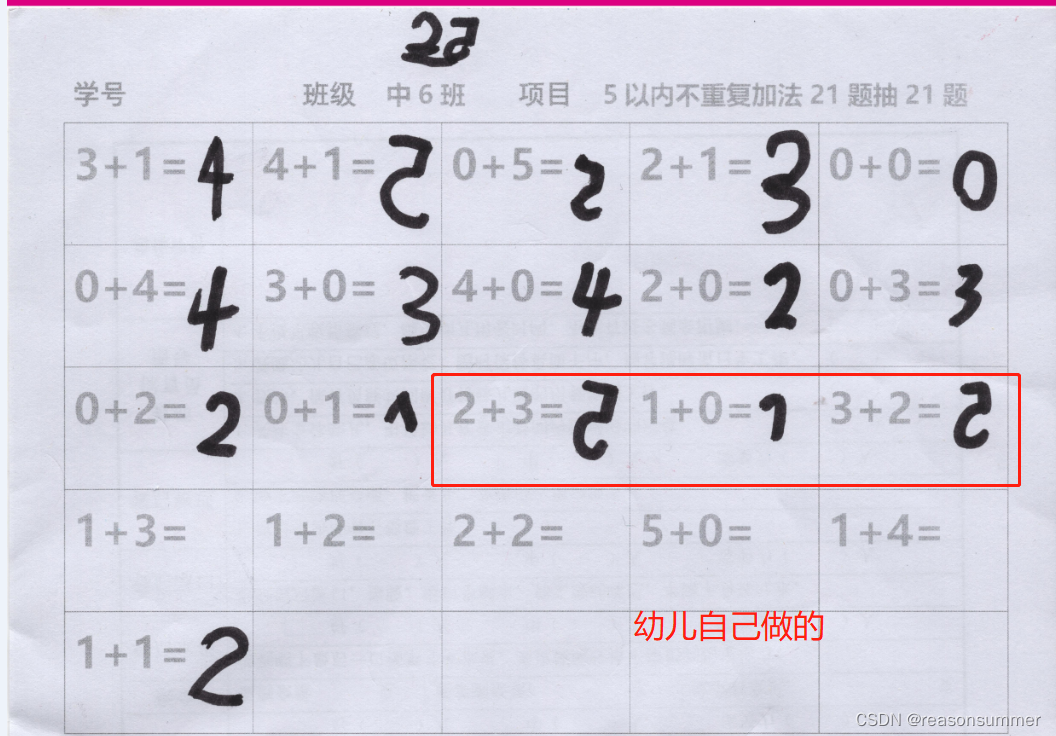
【教学类-30-01】5以内加法题不重复(一页两份)(包含1以内、2以内、3以内、4以内、5以内加法,抽取最大不重复数量)
作品样式: 背景需求: 虽然学前阶段就对幼儿训练加减法列式题遭到诟病,但是从不少幼儿(特别是二胎)在家中已经开始适应加减法题型了。 结合中班年龄特点,我从5以内的不重复加法题开始实验(雪花…...
写博客8年与人生第一个502万
题记:我们并非生来强大,但依然可以不负青春。 原本想好好写一下如何制定一个目标并通过一点一滴的努力去实现,这三年反思发现其实写自己的经历并不重要。 很多人都听过一句话:榜样的力量是无穷的。 更现实和实际的情况是&#x…...
)
【华为OD机试真题】日志采集系统(javapython)
日志采集系统 时间限制:1s空间限制:256MB限定语言:不限 题目描述: 日志采集是运维系统的的核心组件。日志是按行生成,每行记做一条,由采集系统分 批上报。 如果上报太频繁,会对服务端造成压力;如果上报太晚,会降低用户的体验;如果一 次上报的条数太多,会导致超时…...

epoll源码剖析
文章目录1.前言2.应用层的体现3.两个重要结构(1)eventpoll(2)epitem4.四个函数(1)epoll_create源码(2)epoll_ctl源码(3)epoll_wait的源码(4)epoll_event_callback()5.水平触发和边缘触发1.状态变化2.LT模式3.ET模式1.前言 好久好久没有更新博客了,最近一直在实习&a…...
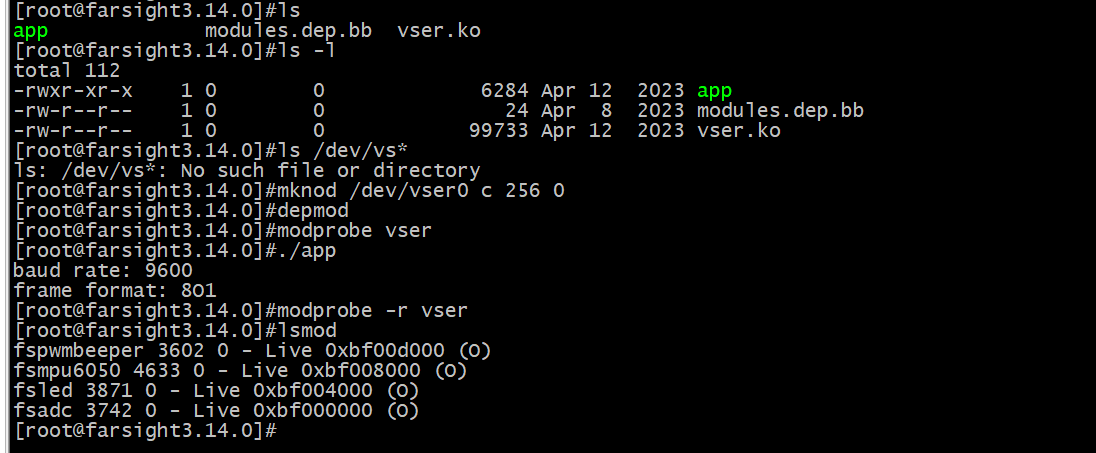
Linux驱动开发——高级I/O操作(一)
一个设备除了能通过读写操作来收发数据或返回、保存数据,还应该有很多其他的操作。比如一个串口设备还应该具备波特率获取和设置、帧格式获取和设置的操作;一个LED设备甚至不应该有读写操作,而应该具备点灯和灭灯的操作。硬件设备是如此众多,…...

适配器模式:C++设计模式中的瑞士军刀
适配器模式揭秘:C设计模式中的瑞士军刀引言设计模式的重要性适配器模式简介与应用场景适配器模式在现代软件设计中的地位与价值适配器模式基本概念适配器模式的定义与核心思想类适配器与对象适配器的比较设计原则与适配器模式的关系类适配器实现类适配器模式的UML图…...
【三十天精通Vue 3】 第三天 Vue 3的组件详解
✅创作者:陈书予 🎉个人主页:陈书予的个人主页 🍁陈书予的个人社区,欢迎你的加入: 陈书予的社区 🌟专栏地址: 三十天精通 Vue 3 文章目录引言一、Vue 3 组件的概述1. Vue 3 的组件系统2. Vue 3 组件的特点…...

SqlServer实用系统视图,你了解多少?
SqlServer实用系统视图,你了解多少?前言master..spt_valuessysdatabasessysprocesses一套组合拳sysobjectssys.all_objectssyscolumnssystypessyscommentssysindexes结束语前言 在使用任何数据库软件的时候,该软件都会提供一些可能不是那么公…...

NodeJS Cluster模块基础教程
Cluster简介 默认情况下,Node.js不会利用所有的CPU,即使机器有多个CPU。一旦这个进程崩掉,那么整个 web 服务就崩掉了。 应用部署到多核服务器时,为了充分利用多核 CPU 资源一般启动多个 NodeJS 进程提供服务,这时就…...
[C++笔记]vector
vector vector的说明文档 vector是表示可变大小数组的序列容器(动态顺序表)。就像数组一样,vector也采用连续的存储空间来储存元素。这就意味着可以用下标对vector的元素进行访问,和数组一样高效。与数组不同的是,它的大小可以动态改变——…...

基于APScheduler的定时提醒服务设计与Python实现
1. 项目概述与核心价值最近在折腾一个名为rogerwus/Noonwake_test的项目,这名字乍一看有点神秘,像是某个内部测试或者个人实验性质的仓库。作为一名常年泡在代码仓库里的开发者,我对这类项目标题背后的故事和技术探索总是充满好奇。经过一番深…...

基于大语言模型的智能终端助手:LetMeDoIt的设计、部署与实战
1. 项目概述:一个能听懂人话的AI终端伴侣如果你和我一样,每天有大量时间泡在终端里,那么“如何让命令行更智能、更高效”一定是个永恒的课题。传统的CLI工具链虽然强大,但学习曲线陡峭,命令参数繁多,上下文…...

基于CRICKIT与蓝牙的双足机器人:从机械原理到手机遥控实践
1. 项目概述:一个会“翻跟头”的蓝牙机器人如果你玩腻了循迹小车或者舵机云台,想做一个动作更“魔性”、互动性更强的机器人,那么这个基于CRICKIT和Feather M0 Bluefruit的双足机器人绝对能让你眼前一亮。它走起路来不是平稳前进,…...

一文读懂 .git 目录:Git 仓库的心脏与底层原理
你是否也曾好奇,Git 是如何记住我们每一次提交、每一次分支切换的?答案就藏在项目根目录下那个不起眼的 .git 文件夹里。它是 Git 仓库的 “心脏”,所有版本控制的数据、历史记录、配置信息都存储在这里。今天,我们就来深度拆解 .…...

AI赋能效率革命:用ChatGPT+Markdown一键生成Xmind/ProcessOn专业流程图
1. 为什么需要AI辅助图表制作? 在日常工作和学习中,我们经常需要制作各种图表来梳理思路或展示信息。传统方式要么依赖专业软件操作(比如反复拖拽图形元件),要么需要手动调整格式排版,整个过程往往要花费半…...

三步快速解锁网盘高速下载:LinkSwift直链解析终极指南
三步快速解锁网盘高速下载:LinkSwift直链解析终极指南 【免费下载链接】Online-disk-direct-link-download-assistant 一个基于 JavaScript 的网盘文件下载地址获取工具。基于【网盘直链下载助手】修改 ,支持 百度网盘 / 阿里云盘 / 中国移动云盘 / 天翼…...

HarmonyOS 6 CalendarPickerDialog 日历选择弹窗使用文档
文章目录完整代码功能概述代码结构说明核心参数详解1. 基础参数2. DateRange 结构说明3. 示例禁用区间配置说明总结完整代码 Entry Component struct CalendarPickerDialogExample {private selectedDate: Date new Date(2025-08-05);private disabledDateRange: DateRange[]…...

如何通过LizzieYzy围棋AI分析工具在30天内实现棋力突破:从入门到实战的完整指南
如何通过LizzieYzy围棋AI分析工具在30天内实现棋力突破:从入门到实战的完整指南 【免费下载链接】lizzieyzy LizzieYzy - GUI for Game of Go 项目地址: https://gitcode.com/gh_mirrors/li/lizzieyzy 在围棋AI技术飞速发展的今天,LizzieYzy作为一…...

Eviews面板数据建模保姆级教程:从Hausman检验到模型选择,一次讲透固定效应与随机效应
Eviews面板数据建模实战指南:从数据导入到模型选择的完整流程 面板数据分析作为计量经济学中的重要工具,能够同时捕捉时间和个体维度的信息。对于刚接触Eviews的研究者来说,如何正确建立面板模型往往令人困惑——从数据准备到模型选择&#x…...

3个步骤轻松下载B站视频:BilibiliDown全平台解决方案
3个步骤轻松下载B站视频:BilibiliDown全平台解决方案 【免费下载链接】BilibiliDown (GUI-多平台支持) B站 哔哩哔哩 视频下载器。支持稍后再看、收藏夹、UP主视频批量下载|Bilibili Video Downloader 😳 项目地址: https://gitcode.com/gh_mirrors/bi…...