【Unity UPR】造个获取深度法线纹理的轮子
描边需要深度+法线纹理的加持,效果才能达到最好,但URP下很多版本不支持直接获取_CameraNormalsTexture,而我本人也尝试了一下在12.1.7下偷懒直接拿SSAO里的Depth Normal图,
虽然也能实现吧,但是需要打开SSAO的同时,再在shader中加入指定的Tag为"DepthNormals"的Pass才能实现:

稍微有点麻烦,而且总有种用别人东西的感觉。
那就尝试一下自己动手吧!动手造一个获取深度法线纹理的轮子!
贴一下项目环境:
URP12.1.7
Unity2021.3.8f1
浅看两篇手动获取深度法线纹理的文章:URP深度法线纹理 - 简书 (jianshu.com)和雪风大佬的urp管线的自学hlsl之路 第二十四篇 科幻扫描效果后篇 - 哔哩哔哩 (bilibili.com),实现都是依靠build-in底下的shader,然后将绘制出来的纹理传递给URP下自己项目定义的shader使用。
1 定义RenderFeature获取法线深度图
这个是参考了上述的过程,说实话,内容太过复杂。只有不断多学习,多做,每次都好好做备注,总有一天会完全理解的:
using Unity.VisualScripting;
using UnityEngine;
using UnityEngine.Rendering;
using UnityEngine.Rendering.Universal;public class DepthNormalsFeature : ScriptableRendererFeature
{// 定义3个共有变量public class Settings{//public Shader shader; // 设置后处理shaderpublic Material material; //后处理Materialpublic RenderPassEvent renderPassEvent = RenderPassEvent.BeforeRenderingPostProcessing; // 定义事件位置,放在了官方的后处理之前}// 初始化一个刚刚定义的Settings类public Settings settings = new Settings();// 初始化PassDepthNormalsPass depthNormalsPass;// 初始化纹理RenderTargetHandle depthNormalsTexture;// 材质Material depthNormalsMaterial;// 给pass传递变量,并加入渲染管线中public override void Create(){// 通过Built-it管线中的Shader创建材质,最重要的一步!depthNormalsMaterial = CoreUtils.CreateEngineMaterial("Hidden/Internal-DepthNormalsTexture");// 获取Pass(渲染队列,渲染对象,材质)depthNormalsPass = new DepthNormalsPass(RenderQueueRange.opaque, -1, depthNormalsMaterial);// 设置渲染时机 = 预渲染通道后depthNormalsPass.renderPassEvent = RenderPassEvent.AfterRenderingPrePasses;// 设置纹理名depthNormalsTexture.Init("_CameraDepthNormalsTexture");}//这里你可以在渲染器中注入一个或多个渲染通道。//这个方法在设置渲染器时被调用。public override void AddRenderPasses(ScriptableRenderer renderer, ref RenderingData renderingData){// 对Pass进行参数设置(当前渲染相机信息,深度法线纹理)depthNormalsPass.Setup(renderingData.cameraData.cameraTargetDescriptor, depthNormalsTexture);// 写入渲染管线队列renderer.EnqueuePass(depthNormalsPass);}}public class DepthNormalsPass : ScriptableRenderPass
{int kDepthBufferBits = 32; // 缓冲区大小private RenderTargetHandle Destination { get; set; } // 深度法线纹理private Material DepthNormalsMaterial = null; // 材质private FilteringSettings m_FilteringSettings; // 筛选设置static readonly string m_ProfilerTag = "Depth Normals Pre Pass"; // 定义渲染TagShaderTagId m_ShaderTagId = new ShaderTagId("MyDepthOnly"); // 绘制标签,Shader需要声明这个标签的tag/// <summary>/// 构造函数Pass/// </summary>/// <param name="renderQueueRange"></param>/// <param name="layerMask"></param>/// <param name="material"></param>public DepthNormalsPass(RenderQueueRange renderQueueRange, LayerMask layerMask, Material material){m_FilteringSettings = new FilteringSettings(renderQueueRange, layerMask);DepthNormalsMaterial = material;}/// <summary>/// 参数设置/// </summary>/// <param name="baseDescriptor"></param>/// <param name="Destination"></param>public void Setup(RenderTextureDescriptor baseDescriptor, RenderTargetHandle Destination){// 设置纹理this.Destination = Destination;}/// <summary>/// 配置渲染目标,可创建临时纹理/// </summary>/// <param name="cmd"></param>/// <param name="cameraTextureDescriptor"></param>public override void Configure(CommandBuffer cmd, RenderTextureDescriptor cameraTextureDescriptor){// 设置渲染目标信息RenderTextureDescriptor descriptor = cameraTextureDescriptor;descriptor.depthBufferBits = kDepthBufferBits;descriptor.colorFormat = RenderTextureFormat.ARGB32;// 创建一个临时的RT(储存深度法线纹理、目标信息和滤波模式)cmd.GetTemporaryRT(Destination.id, descriptor, FilterMode.Point);// 配置ConfigureTarget(Destination.Identifier());// 清楚,未渲染时配置为黑色ConfigureClear(ClearFlag.All, Color.black);}// /// <summary>/// 后处理逻辑和渲染核心函数,相当于build-in 的OnRenderImage()/// 实现渲染逻辑/// </summary>/// <param name="context"></param>/// <param name="renderingData"></param>public override void Execute(ScriptableRenderContext context, ref RenderingData renderingData){var cmd = CommandBufferPool.Get(m_ProfilerTag); // 设置渲染标签using (new ProfilingSample(cmd, m_ProfilerTag)){// 执行命令缓存context.ExecuteCommandBuffer(cmd);// 清楚数据缓存cmd.Clear();// 相机的排序标志var sortFlags = renderingData.cameraData.defaultOpaqueSortFlags;// 创建绘制设置var drawSettings = CreateDrawingSettings(m_ShaderTagId, ref renderingData, sortFlags);// 设置对象数据drawSettings.perObjectData = PerObjectData.None;// 设置覆盖材质drawSettings.overrideMaterial = DepthNormalsMaterial;// 绘制渲染器context.DrawRenderers(renderingData.cullResults, ref drawSettings, ref m_FilteringSettings);// 设置全局纹理cmd.SetGlobalTexture("_CameraDepthNormalsTexture", Destination.id);}// 执行命令缓冲区context.ExecuteCommandBuffer(cmd);CommandBufferPool.Release(cmd);}// 清除此呈现传递执行期间创建的任何已分配资源。public override void FrameCleanup(CommandBuffer cmd){if (Destination != RenderTargetHandle.CameraTarget){cmd.ReleaseTemporaryRT(Destination.id);Destination = RenderTargetHandle.CameraTarget;}}
}2 在Shader中使用
上述RenderFeature我们获得了一个全局的_CameraDepthNormalsTexture变量,我们就可以像Build-in下一样访问啦!
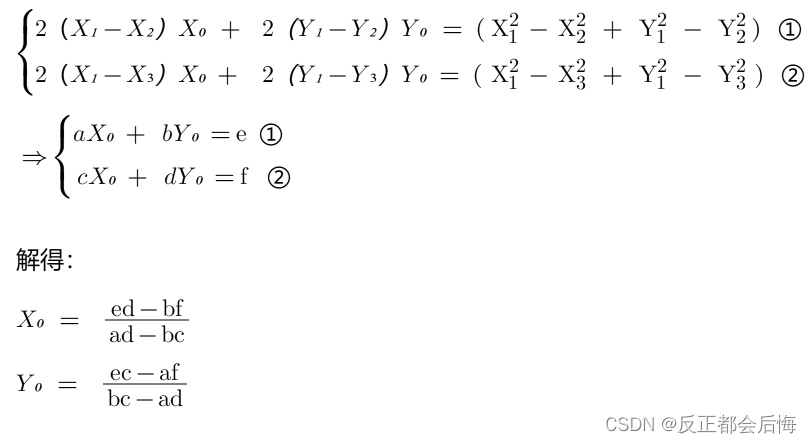
但是,一些之前固定管线下的一些采样、解码Texture函数在URP下不能直接用,要自己定义,主要需要一个解码函数。固定管线下函数:

其中:
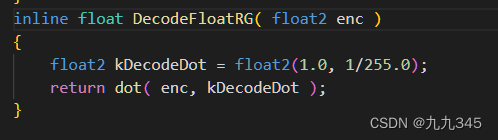
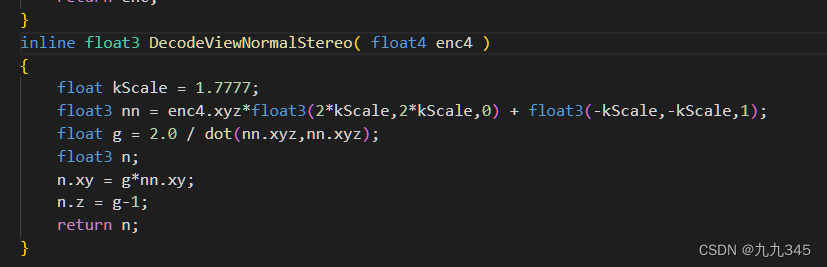
直接搬运!完全没问题~
我给他合起来了,合成了一个函数,返回的时候用就行:
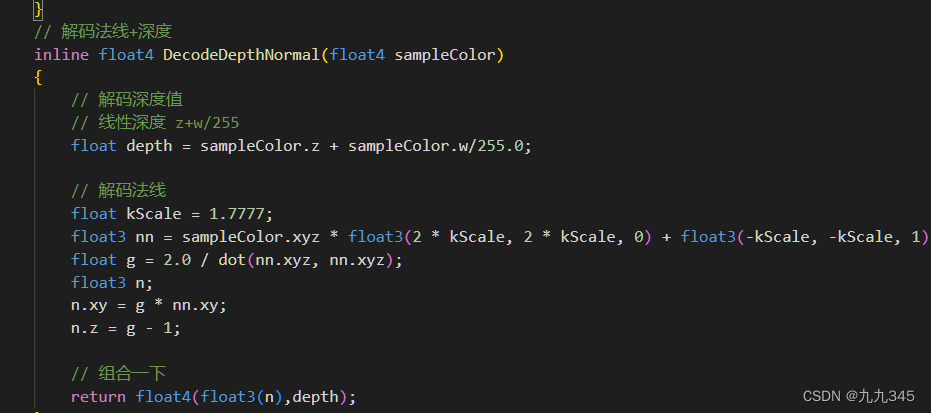
还要注意,采样要是屏幕空间的UV,不然乱七八糟。
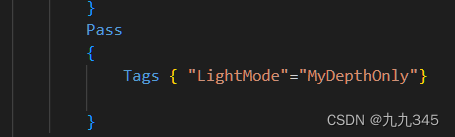
然后shader后面必须也要加上一个自定义的LightTag:
突然发现这个复杂程度跟SSAO那个差不多。。。
看看效果,我们单独输出深度和法线:
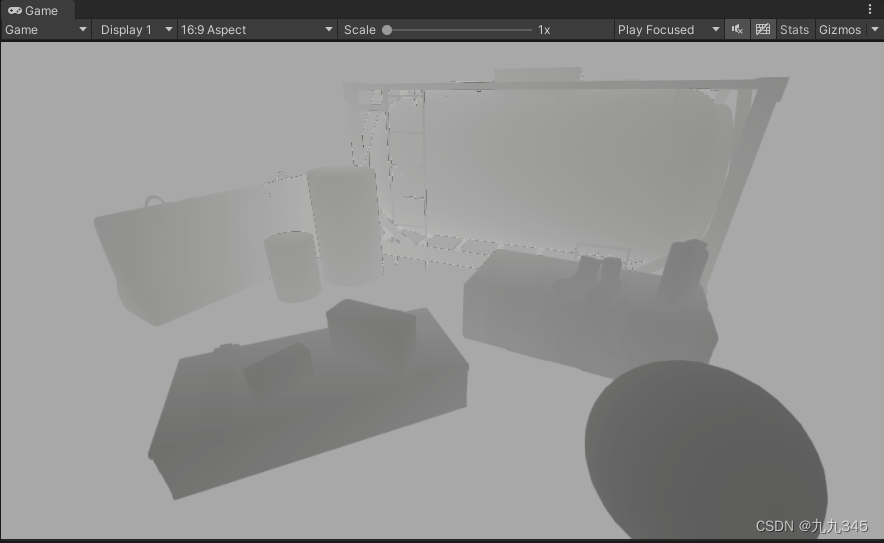
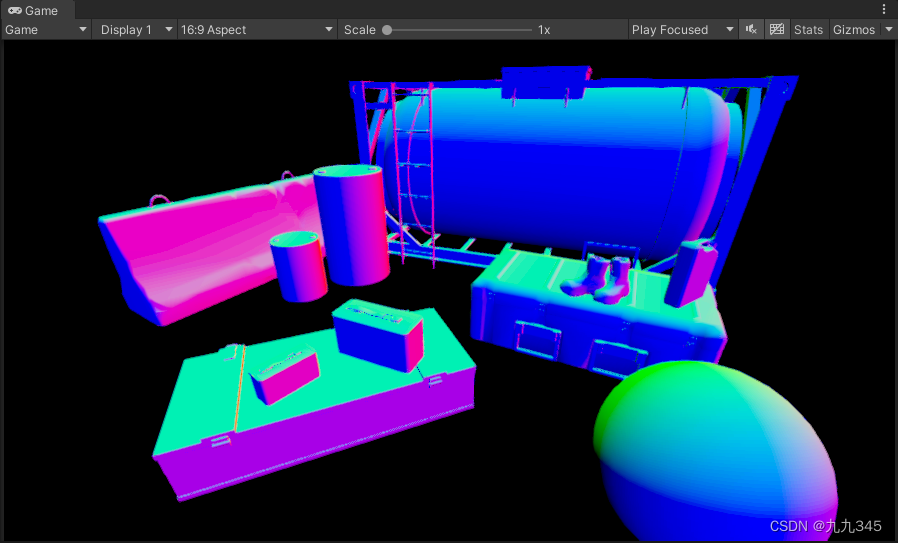
一切正常!终于可以进行下一步了。
参考
URP深度法线纹理 - 简书 (jianshu.com)
相关文章:
【Unity UPR】造个获取深度法线纹理的轮子
描边需要深度法线纹理的加持,效果才能达到最好,但URP下很多版本不支持直接获取_CameraNormalsTexture,而我本人也尝试了一下在12.1.7下偷懒直接拿SSAO里的Depth Normal图, 虽然也能实现吧,但是需要打开SSAO的同时&…...

用 Python解析HTML页面
用 Python 解析 HTML 页面 在网络爬取的过程中,我们通常需要对所爬取的页面进行解析,从中提取我们需要的数据。网页的结构通常是由 HTML 标签所组成的,通过对这些标签的解析,可以得到网页中所包含的有用信息。在 Python 中&#…...

python logging 详解
python logging 详解1. 导入logging模块2. 配置日志记录器3. 记录日志消息4. 自定义日志记录器5. 日志轮换6. 日志过滤器7. 日志异常跟踪8. 日志输出到控制台和文件9. 使用配置文件10. 使用第三方库11. format格式详解12. 总结Python的logging模块提供了灵活的日志记录功能&…...
( “树” 之 DFS) 687. 最长同值路径 ——【Leetcode每日一题】
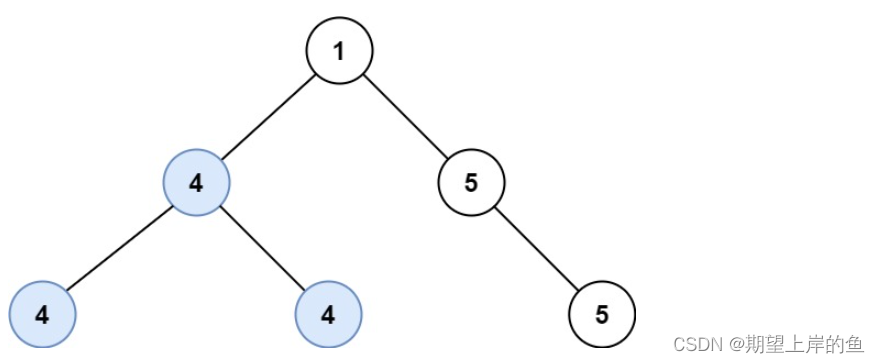
687. 最长同值路径 给定一个二叉树的 root ,返回 最长的路径的长度 ,这个路径中的 每个节点具有相同值 。 这条路径可以经过也可以不经过根节点。 两个节点之间的路径长度 由它们之间的边数表示。 示例 1: 输入:root [5,4,5,1,1,5] 输出&…...

Elasticsearch解决不能修改索引、字段问题解决方案
问题1: 由于es索引不能删除,不能修改,在不影响原数据的情况下,并且生产服务不停机的情况下,怎么修改索引,并保留原索引内的数据? 基于kibanna的dev Tools执行参数,淘汰postman&…...

面试官在线改简历 | 只有6秒!程序员简历这样写才能抓住科技公司大佬的眼球
其实每一份简历 每一个瑞库特 可能也就平均花6秒钟的时间看一看 来进行一个快速的筛选 一份好的简历到底应该长什么样 同时呢在我们写简历的过程当中 应该避免什么样子的错误和误区 那我们今天呢来聊聊这个简历的事 大家知道 每次到了招聘高分期啊这些大的公司 像谷歌Facebook…...

IM即时通讯-7-如何设计通知提醒
本文大纲 本文从为什么做通知提醒, 以及如何设计通知提醒, 以及如何衡量通知提醒三方面解释了如何设计通知提醒。 对于重点的如何设计通知提醒, 通过拆分前台和后台, 前台采用自建或者二方通道, 后台采用厂商信令通道…...
赛狐ERP | 亚马逊选品方法与策略详解:如何挑选最优质的产品?
亚马逊作为全球电商巨头,其产品种类之丰富也是无人能及。然而,在如此繁杂的商品体系下,如何选品成为了摆在商家面前的一道难题。本文将从亚马逊选品的目标、方法、策略三个方面进行详细介绍。 一、选品的目标 在进行选择之前,必…...

【GCU体验】基于PyTorch + GCU跑通ResNet50模型并测试GCU性能
一、环境 地址:启智社区:https://openi.pcl.ac.cn/ 二、计算卡介绍 云燧T20是基于邃思2.0芯片打造的面向数据中心的第二代人工智能训练加速卡,具有模型覆盖面广、性能强、软件生态开放等特点,可支持多种人工智能训练场景。同时具备灵活的可…...
【机器视觉------标定篇(二)】三点成圆算法(求相机旋转中心)
应用场景 机器视觉项目应用中,相机安装在机器人上,并且需要定位产品返回坐标偏差以及角度偏差。 与九点标定配合使用,实现精准角度补偿。 算法输入 不共线的三点坐标 A(X₁,Y₁) ,B(X₂,Y₂&…...

AUTOSAR E2E详细介绍
E2E概述 E2E(End-To-End)是AUTOSAR为功能安全ISO26262提出的一个安全模块。这里的端(End)并不是指ECU与ECU之间,而是指通信ECU上的SW-C与SW-C之间。 在车载网络中,信息交换通常是从一个ECU发送信号,另一个ECU接收信号。对E2E而言,通常是从源SW-C生成信号,经过RTE(R…...

Dream 主题使用手册 - 基础篇
Dream 主题基于 Halo 博客系统开发,本文将介绍本主题一些功能的使用,文档将持续更新。 一、安装 & 更新 1.1 安装包安装 & 更新 进入主题 Release 界面:https://github.com/nineya/halo-theme-dream/releases 下载主题压缩包 halo…...
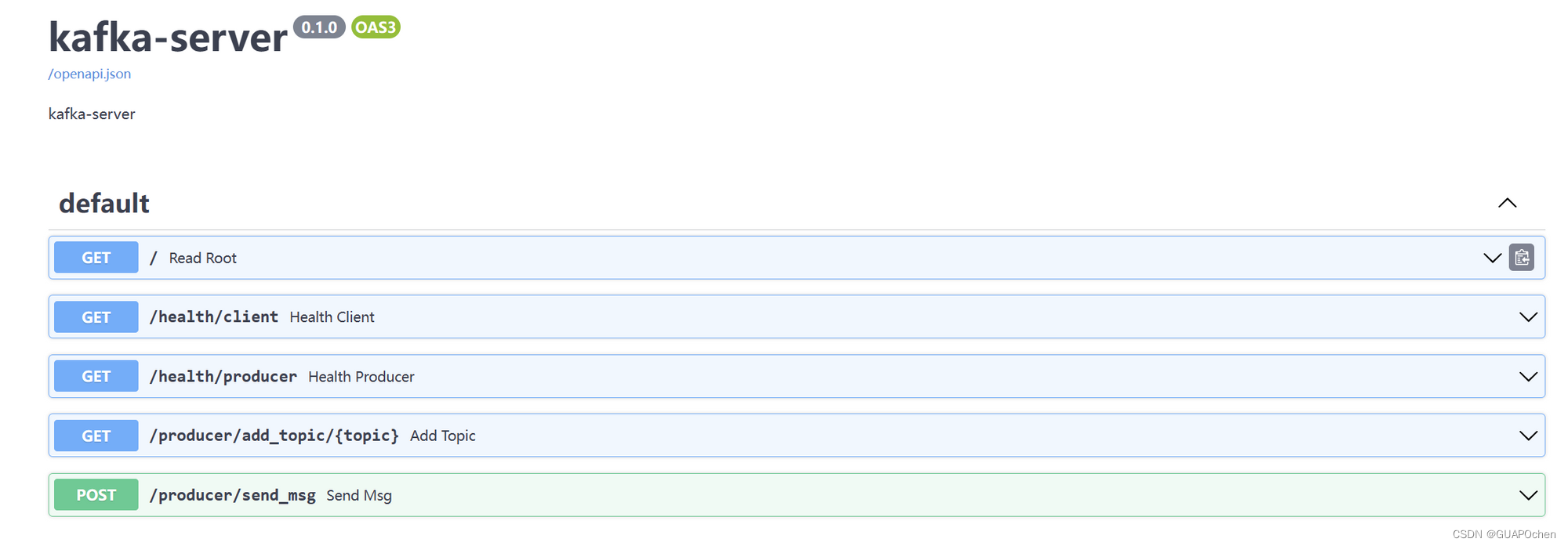
WSL下的Kafka开发容器:Docker搭建、API、整合
背景介绍 Kafka是一个分布式流处理平台,可以处理大规模数据流并支持实时数据流的处理。 本文介绍了如何在WSL下使用Docker搭建Kafka容器,并使用Python的kafka-python库和FastAPI框架实现了一个简单的API。同时,还将该服务整合到一个整体的d…...
下载安装)
cv2(OpenCV)下载安装
cv2对应库是OpenCV,官网下载链接:https://www.lfd.uci.edu/~gohlke/pythonlibs/#opencv 最好下载对应python版本的,通过pip命令安装可能会出现版本过高或者过低的问题,导致import cv2没问题,但是内部函数无法调用。 …...

【剑指 offer】旋转数组的最小数字
✨个人主页:bit me👇 ✨当前专栏:算法训练营👇 旋 转 数 组 的 最 小 数 字核心考点:数组理解,二分查找,临界条件 描述: 有一个长度为 n 的非降序数组,比如[1,2,3,4,5]…...

GB 9706.1-2020 医用电气设备第1部分:基本安全和基本性能的通用要求-1
这是份什么文件 这是一份中华人民共和国国家标准,具体为GB9706.1—2020,标准适用于医用电气设备,并规定了医用电气设备基本安全和基本性能的通用要求。主要涵盖了医疗电器设备与患者接触的各种要求,包括电气安全、机械防护、防护辐…...
认识C++《共、枚、指1》
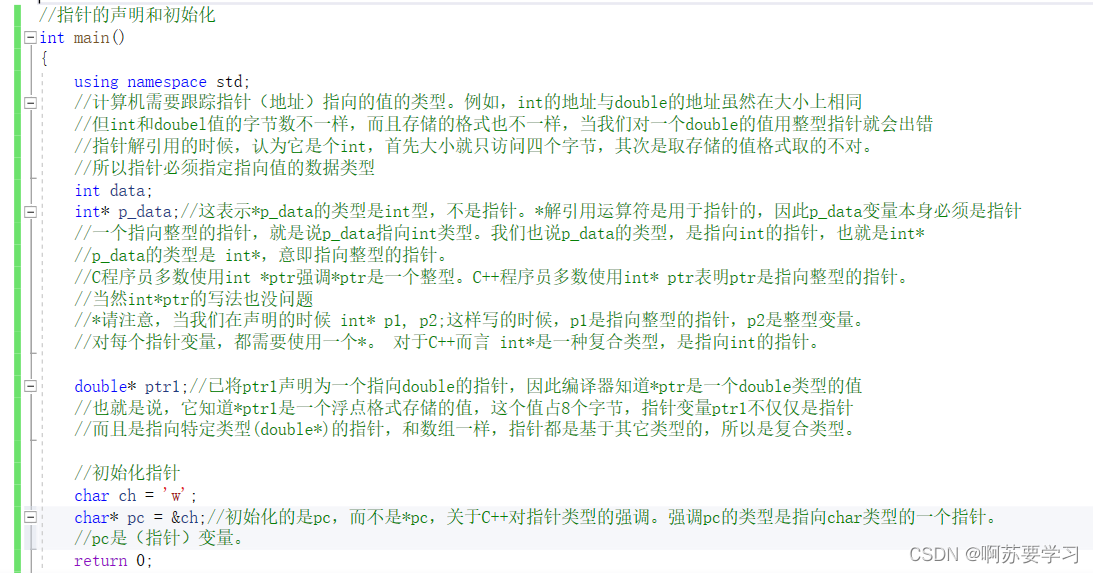
目录 前言: 1.共用体的基本知识 2.匿名共用体 3.枚举 3.1设置枚举值 3.2枚举的应用场景 3.3枚举变量的取值范围 4.地址和自由存储空间 5.指针的思想 6.指针的声明和初始化 前言: 指针内容比较多,还需要再出一篇。久等了!!我看了我的…...

vim 一键配置
PS:本文是为了以后为了方便,做备忘的,今天用的时候找了半天很麻烦。 vim编辑器一键配置 在非root用户下执行上面的语句即可,不要在root用户下直接安装! 安装的时候需要输入root用户的密码,请找您的服主要一…...

如何成为一名成功的 PHP 开发者
当今的网络应用开发市场,PHP 一直是其中最受欢迎的语言之一,许多优秀的网络应用程序都是由 PHP 开发人员设计和开发的。如果你想成为一名成功的 PHP 开发者,以下是几个关键步骤: 1. 学习基础知识 首先,你需要掌握 PH…...
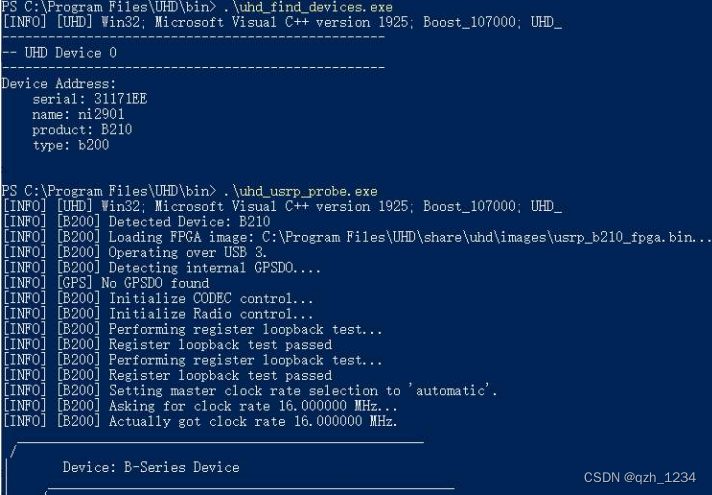
UHD安装教程
UHD Universal Hardware Driver,即USRP驱动。 UHD,Windows平台安装教程 uhd驱动安装 http://files.ettus.com/binaries/misc/erllc_uhd_winusb_driver.zip 安装LibUSBx http://files.ettus.com/binaries/uhd/latest_release 下载默认C盘 环境配置 将…...
 vs VARCHAR(500):存储一样大,排序却慢了 3 倍)
VARCHAR(50) vs VARCHAR(500):存储一样大,排序却慢了 3 倍
👉 这是一个或许对你有用的社群🐱 一对一交流/面试小册/简历优化/求职解惑,欢迎加入「芋道快速开发平台」知识星球。下面是星球提供的部分资料: 《项目实战(视频)》:从书中学,往事中…...
机制的)
深入CanFestival源码:我是如何通过调试理解PDO映射与同步(SYNC)机制的
深入CanFestival源码:我是如何通过调试理解PDO映射与同步(SYNC)机制的 当你在工业控制项目中第一次遇到CANopen设备的PDO数据突然"消失",或是SYNC信号与数据流总差那么几毫秒时,就会明白协议栈源码层面的理解有多重要。去年在为某医…...

Unity URP专业UI模糊效果实战指南:4步实现高性能毛玻璃界面
Unity URP专业UI模糊效果实战指南:4步实现高性能毛玻璃界面 【免费下载链接】Unified-Universal-Blur UI blur (translucent) effect for Unity. 项目地址: https://gitcode.com/gh_mirrors/un/Unified-Universal-Blur 在Unity游戏开发中,UI界面的…...

云原生安全扫描:保护容器化应用的安全
云原生安全扫描:保护容器化应用的安全 引言 在云原生环境中,安全扫描是保障应用安全的重要手段。通过安全扫描,我们可以发现容器镜像和代码中的安全漏洞。 今天就来分享一下云原生安全扫描的最佳实践。 安全扫描类型 镜像扫描 扫描容器镜像中…...

【DeepSeek×GCP联合认证部署方案】:谷歌云架构师与DeepSeek官方工程师联名验证的3种生产级拓扑
更多请点击: https://codechina.net 第一章:DeepSeek GCP部署指南 在Google Cloud Platform上部署DeepSeek系列大语言模型(如DeepSeek-V2、DeepSeek-Coder)需兼顾计算性能、存储效率与网络低延迟。本指南基于GCP的Vertex AI平台与…...

JavaQuestPlayer终极指南:5大核心功能让你的QSP游戏开发与运行变得简单高效
JavaQuestPlayer终极指南:5大核心功能让你的QSP游戏开发与运行变得简单高效 【免费下载链接】JavaQuestPlayer 项目地址: https://gitcode.com/gh_mirrors/ja/JavaQuestPlayer 还在为QSP游戏的跨平台兼容性而烦恼吗?还在为游戏开发调试效率低下而…...

IfcOpenShell技术架构深度解析:开源IFC引擎的模块化设计与高性能实现
IfcOpenShell技术架构深度解析:开源IFC引擎的模块化设计与高性能实现 【免费下载链接】IfcOpenShell Open source IFC library and geometry engine 项目地址: https://gitcode.com/gh_mirrors/if/IfcOpenShell IfcOpenShell作为开源建筑信息模型(…...
)
一机多版本Quartus共存?教你修复USB Blaster识别冲突(修改JTAG服务路径详解)
多版本Quartus共存时的USB Blaster识别冲突解决方案 当我们需要在同一台电脑上安装多个版本的Quartus软件时(比如为了兼容不同时期的FPGA项目),经常会遇到一个棘手问题:USB Blaster无法被正确识别。这种情况通常发生在安装了新旧两…...

STM32CUBEMX+Keil AC6编译提速实战:解决LWIP和绝对地址警告的坑
STM32CUBEMXKeil AC6编译提速实战:解决LWIP和绝对地址警告的坑 当STM32开发者从Keil AC5编译器切换到AC6时,往往会遇到两个典型问题:LWIP编译错误和绝对地址警告。本文将深入分析这些问题的根源,并提供经过验证的解决方案…...

电流互感器选型与设计全攻略:励磁电感、匝数比及误差控制实战
摘要: 电流互感器(CT)作为电力监测、过流保护、计量反馈的核心元件,其选型直接影响系统的测量精度与可靠性。工程师常因忽视励磁电感与二次侧负载的匹配导致角差超差,或未考虑暂态饱和特性造成保护误动。本文从CT工作原…...