双目三维测距(python)
文章目录
- 1. 双目检测
- 1.1 调用相机
- 1.2 分割画面
- 2. 双目标定
- 2.1 相机标定
- 2.2 获取参数
- 3. 双目测距
- 3.1 立体校正
- 3.1.1 校正目的
- 3.1.2 校正方法
- 3.1.2 相关代码
- 3.2 立体匹配和视差计算
- 3.3 深度计算
- 3.4 注意事项
- 4. 完整代码
代码打包下载:
链接1:https://download.csdn.net/download/qq_45077760/87680186
链接2:https://github.com/up-up-up-up/Binocular-ranging(GitHub)
本文是实现某一个像素点的测距,想用yolov5实现测距的,请移步👉这篇文章
1. 双目检测
1.1 调用相机
打开相机,测试双目相机两个画面是否正常显示,也可进行棋盘格拍照
import cv2
cap =cv2.VideoCapture(1) # 打开相机,根据设备而定,一般是0或1
cap.set(cv2.CAP_PROP_FRAME_WIDTH, 2560) # 设置相机分辨率 2560x720
cap.set(cv2.CAP_PROP_FRAME_HEIGHT, 720)
fourcc = cv2.VideoWriter_fourcc(*'XVID') # 保存为avi格式
out = cv2.VideoWriter('myvideo.avi',fourcc, 20.0,(2560,720))
i= 0
while True:ret, frame = cap.read()if not ret:print("Can't receive frame (stream end?). Exiting ...")breakout.write(frame)cv2.imshow('camera',frame)key = cv2.waitKey(1)if key == ord('q') or key == 27: # 按下q退出程序并保存视频breakif key == ord("w"): # 按下w保存图片cv2.imwrite("./%d.png" % i, frame) # 设置拍摄照片的保存路径print("Save images %d succeed!" % i)i += 1
cap.release()
out.release()
cv2.destroyAllWindows()
1.2 分割画面
同理把这个代码稍作修改,可以实现拍照功能,由于我这里是zed 2i相机,自带的有sdk,直接调用的api进行拍照,拍照后需要对双目画面进行分割:
from PIL import Image
import ospath = 'C:/Users/hp/Desktop/1' # 文件目录
# path这个目录处理完之后需要手动更改
path_list = os.listdir(path)
print(path_list)for i in path_list: # 截左半张图片a = open(os.path.join(path, i), 'rb')img = Image.open(a)w = img.width # 图片的宽h = img.height # 图片的高print('正在处理图片', i, '宽', w, '长', h)box = (0, 0, w * 0.5, h) # box元组内分别是 所处理图片中想要截取的部分的 左上角和右下角的坐标img = img.crop(box)print('正在截取左半张图...')img.save('L' + i) # 这里需要对截出的图加一个字母进行标识,防止名称相同导致覆盖print('L-', i, '保存成功')for i in path_list: # 截取右半张图片a = open(os.path.join(path, i), 'rb')img = Image.open(a)w = img.width # 图片的宽h = img.height # 图片的高print('正在处理图片', i, '宽', w, '长', h)box = (w * 0.5, 0, w, h)img = img.crop(box)print('正在截取右半张图...')img.save('R' + i)print('R-', i, '保存成功')print("'{}'目录下所有图片已经保存到本文件目录下。".format(path))
2. 双目标定
2.1 相机标定
打开Matlab 上方的工具栏APP,找到图像处理和计算机视觉下的Stereo Camera Calibration工具,打开并将分割后的图片导入

设置参数,对于一般的相机选择2 Coefficients选项即可,对于大视场相机则选择3 Coefficients选项。拉线删除误差较大的画面:

2.2 获取参数
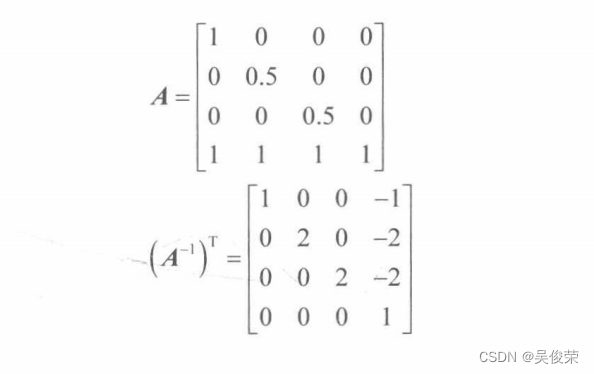
在matlab控制台分别输入 stereoParams.CameraParameters1.IntrinsicMatrix 和stereoParams.CameraParameters2.IntrinsicMatrix 获得左右相机的参数,下边填写时请注意进行矩阵的转置

为了获取左相机的畸变系数:[k1, k2, p1, p2, k3],我们需要分别输入stereoParams.CameraParameters1.RadialDistortion 和 stereoParams.CameraParameters1.TangentialDistortion

同理分别输入 stereoParams.CameraParameters2.RadialDistortion 和 stereoParams.CameraParameters2.TangentialDistortion 获取右相机的畸变系数:[k1, k2, p1, p2, k3]

分别输入 stereoParams.RotationOfCamera2 和 stereoParams 来获取双目的旋转矩阵和平移矩阵

将以上参数填写进stereoconfig.py文件里,注意转置
import numpy as np# 双目相机参数
class stereoCamera(object):def __init__(self):# 左相机内参self.cam_matrix_left = np.array([ [479.6018, -0.0769, 652.6060],[ 0, 478.0229, 352.3870],[ 0, 0, 1]])# 右相机内参self.cam_matrix_right = np.array([ [489.9354, 0.2789, 641.6219],[ 0, 487.9356, 354.5612],[ 0, 0, 1]])# 左右相机畸变系数:[k1, k2, p1, p2, k3]self.distortion_l = np.array([[-0.0791, 0.0309, -0.0009, -0.0004, -0.0091]])self.distortion_r = np.array([[-0.1153, 0.1021, -0.0011, -0.0005, -0.0459]])# 旋转矩阵self.R = np.array([ [1.0000, 0.0005, -0.0184],[-0.0005, 1.0000, 0.0001],[ 0.0184, -0.0001, 1.0000] ])# 平移矩阵self.T = np.array([[121.4655], [0.2118], [0.5950]])# 焦距self.focal_length = 749.402 # 默认值,一般取立体校正后的重投影矩阵Q中的 Q[2,3]# 基线距离self.baseline = 121.4655 # 单位:mm, 为平移向量的第一个参数(取绝对值)
3. 双目测距
测距代码这一块参考这篇博文,将其中的open3d删除,以最简洁的方式展示出来,大致步骤:
双目标定 > 立体校正(含消除畸变) > 立体匹配 > 视差计算 > 深度计算(3D坐标)计算
3.1 立体校正
3.1.1 校正目的
立体校正利用双目标定的内外参数(焦距、成像原点、畸变系数)和双目相对位置关系(旋转矩阵和平移向量),分别对左右视图进行消除畸变和行对准,使得左右视图的成像原点坐标一致、两摄像头光轴平行、左右成像平面共面、对极线行对齐。
校正前的左右相机的光心并不是平行的,两个光心的连线就叫基线,像平面与基线的交点就是极点,像点与极点所在的直线就是极线,左右极线与基线构成的平面就是空间点对应的极平面。
校正后,极点在无穷远处,两个相机的光轴平行。像点在左右图像上的高度一致。这也就是极线校正的目标。校正后做后续的立体匹配时,只需在同一行上搜索左右像平面的匹配点即可,能使效率大大提高。

3.1.2 校正方法
实验利用OpenCV中的stereoRectify()函数实现立体校正,stereoRectify()函数内部采用的是Bouguet的极线校正算法,Bouguet算法步骤:
1、将右图像平面相对于左图像平面的旋转矩阵分解成两个矩阵Rl和Rr,叫做左右相机的合成旋转矩阵
2、将左右相机各旋转一半,使得左右相机的光轴平行。此时左右相机的成像面达到平行,但是基线与成像平面不平行
3、构造变换矩阵Rrect使得基线与成像平面平行。构造的方法是通过右相机相对于左相机的偏移矩阵T完成的
4、通过合成旋转矩阵与变换矩阵相乘获得左右相机的整体旋转矩阵。左右相机坐标系乘以各自的整体旋转矩阵就可使得左右相机的主光轴平行,且像平面与基线平行
5、通过上述的两个整体旋转矩阵,就能够得到理想的平行配置的双目立体系图像。校正后根据需要对图像进行裁剪,需重新选择一个图像中心,和图像边缘从而让左、右叠加部分最大
校正后的效果图:

3.1.2 相关代码
def getRectifyTransform(height, width, config):# 读取内参和外参left_K = config.cam_matrix_leftright_K = config.cam_matrix_rightleft_distortion = config.distortion_lright_distortion = config.distortion_rR = config.RT = config.T# 计算校正变换R1, R2, P1, P2, Q, roi1, roi2 = cv2.stereoRectify(left_K, left_distortion, right_K, right_distortion,(width, height), R, T, alpha=0)map1x, map1y = cv2.initUndistortRectifyMap(left_K, left_distortion, R1, P1, (width, height), cv2.CV_32FC1)map2x, map2y = cv2.initUndistortRectifyMap(right_K, right_distortion, R2, P2, (width, height), cv2.CV_32FC1)return map1x, map1y, map2x, map2y, Q# 畸变校正和立体校正
def rectifyImage(image1, image2, map1x, map1y, map2x, map2y):rectifyed_img1 = cv2.remap(image1, map1x, map1y, cv2.INTER_AREA)rectifyed_img2 = cv2.remap(image2, map2x, map2y, cv2.INTER_AREA)return rectifyed_img1, rectifyed_img2
注意:立体校正前应先进行消除畸变处理
3.2 立体匹配和视差计算
立体匹配也称作视差估计,立体匹配可划分为四个步骤:匹配代价计算、代价聚合、视差计算和视差优化。立体校正后的左右两幅图像得到后,匹配点是在同一行上的,可以使用OpenCV中的BM算法或者SGBM算法计算视差图。由于SGBM算法的表现要远远优于BM算法,因此采用SGBM算法获取视差图。在立体匹配生成视差图后,可以对视差图进行后处理,如滤波,空洞填充等方法,从而改善视差图的视觉效果
相关代码
def stereoMatchSGBM(left_image, right_image, down_scale=False):# SGBM匹配参数设置if left_image.ndim == 2:img_channels = 1else:img_channels = 3blockSize = 3paraml = {'minDisparity': 0,'numDisparities': 64,'blockSize': blockSize,'P1': 8 * img_channels * blockSize ** 2,'P2': 32 * img_channels * blockSize ** 2,'disp12MaxDiff': 1,'preFilterCap': 63,'uniquenessRatio': 15,'speckleWindowSize': 100,'speckleRange': 1,'mode': cv2.STEREO_SGBM_MODE_SGBM_3WAY}# 构建SGBM对象left_matcher = cv2.StereoSGBM_create(**paraml)paramr = paramlparamr['minDisparity'] = -paraml['numDisparities']right_matcher = cv2.StereoSGBM_create(**paramr)# 计算视差图size = (left_image.shape[1], left_image.shape[0])if down_scale == False:disparity_left = left_matcher.compute(left_image, right_image)disparity_right = right_matcher.compute(right_image, left_image)else:left_image_down = cv2.pyrDown(left_image)right_image_down = cv2.pyrDown(right_image)factor = left_image.shape[1] / left_image_down.shape[1]disparity_left_half = left_matcher.compute(left_image_down, right_image_down)disparity_right_half = right_matcher.compute(right_image_down, left_image_down)disparity_left = cv2.resize(disparity_left_half, size, interpolation=cv2.INTER_AREA)disparity_right = cv2.resize(disparity_right_half, size, interpolation=cv2.INTER_AREA)disparity_left = factor * disparity_leftdisparity_right = factor * disparity_right# 真实视差(因为SGBM算法得到的视差是×16的)trueDisp_left = disparity_left.astype(np.float32) / 16.trueDisp_right = disparity_right.astype(np.float32) / 16.return trueDisp_left, trueDisp_right
3.3 深度计算
得到视差图后,计算像素深度值,公式如下:
depth = ( f * baseline) / disp
其中,depth表示深度图;f表示归一化的焦距,也就是内参中的fx; baseline是两个相机光心之间的距离,称作基线距离;disp是视差值
实验直接利用opencv中的cv2.reprojectImageTo3D()函数计算深度图,代码如下
def getDepthMapWithQ(disparityMap: np.ndarray, Q: np.ndarray) -> np.ndarray:points_3d = cv2.reprojectImageTo3D(disparityMap, Q)depthMap = points_3d[:, :, 2]reset_index = np.where(np.logical_or(depthMap < 0.0, depthMap > 65535.0))depthMap[reset_index] = 0return depthMap.astype(np.float32)
测距结果:

3.4 注意事项
双目测距效果跟很多因素相关,光线强弱、背景杂乱、目标物距离过远过近、标定误差大小都会影响,大家根据自己的情况寻找相关原因,最后希望大家都可以获得一个较好的测距效果
4. 完整代码
import sys
import cv2
import numpy as np
import stereoconfig# 预处理
def preprocess(img1, img2): # 彩色图->灰度图if (img1.ndim == 3): #判断是否为三维数组img1 = cv2.cvtColor(img1, cv2.COLOR_BGR2GRAY) # 通过OpenCV加载的图像通道顺序是BGRif (img2.ndim == 3):img2 = cv2.cvtColor(img2, cv2.COLOR_BGR2GRAY)# 直方图均衡img1 = cv2.equalizeHist(img1)img2 = cv2.equalizeHist(img2)return img1, img2# 消除畸变
def undistortion(image, camera_matrix, dist_coeff):undistortion_image = cv2.undistort(image, camera_matrix, dist_coeff)return undistortion_image# 获取畸变校正和立体校正的映射变换矩阵、重投影矩阵
# @param:config是一个类,存储着双目标定的参数:config = stereoconfig.stereoCamera()
def getRectifyTransform(height, width, config):# 读取内参和外参left_K = config.cam_matrix_leftright_K = config.cam_matrix_rightleft_distortion = config.distortion_lright_distortion = config.distortion_rR = config.RT = config.T# 计算校正变换R1, R2, P1, P2, Q, roi1, roi2 = cv2.stereoRectify(left_K, left_distortion, right_K, right_distortion,(width, height), R, T, alpha=0)map1x, map1y = cv2.initUndistortRectifyMap(left_K, left_distortion, R1, P1, (width, height), cv2.CV_32FC1)map2x, map2y = cv2.initUndistortRectifyMap(right_K, right_distortion, R2, P2, (width, height), cv2.CV_32FC1)return map1x, map1y, map2x, map2y, Q# 畸变校正和立体校正
def rectifyImage(image1, image2, map1x, map1y, map2x, map2y):rectifyed_img1 = cv2.remap(image1, map1x, map1y, cv2.INTER_AREA)rectifyed_img2 = cv2.remap(image2, map2x, map2y, cv2.INTER_AREA)return rectifyed_img1, rectifyed_img2# 立体校正检验----画线
def draw_line(image1, image2):# 建立输出图像height = max(image1.shape[0], image2.shape[0])width = image1.shape[1] + image2.shape[1]output = np.zeros((height, width, 3), dtype=np.uint8)output[0:image1.shape[0], 0:image1.shape[1]] = image1output[0:image2.shape[0], image1.shape[1]:] = image2# 绘制等间距平行线line_interval = 50 # 直线间隔:50for k in range(height // line_interval):cv2.line(output, (0, line_interval * (k + 1)), (2 * width, line_interval * (k + 1)), (0, 255, 0), thickness=2,lineType=cv2.LINE_AA)return output# 视差计算
def stereoMatchSGBM(left_image, right_image, down_scale=False):# SGBM匹配参数设置if left_image.ndim == 2:img_channels = 1else:img_channels = 3blockSize = 3paraml = {'minDisparity': 0,'numDisparities': 64,'blockSize': blockSize,'P1': 8 * img_channels * blockSize ** 2,'P2': 32 * img_channels * blockSize ** 2,'disp12MaxDiff': 1,'preFilterCap': 63,'uniquenessRatio': 15,'speckleWindowSize': 100,'speckleRange': 1,'mode': cv2.STEREO_SGBM_MODE_SGBM_3WAY}# 构建SGBM对象left_matcher = cv2.StereoSGBM_create(**paraml)paramr = paramlparamr['minDisparity'] = -paraml['numDisparities']right_matcher = cv2.StereoSGBM_create(**paramr)# 计算视差图size = (left_image.shape[1], left_image.shape[0])if down_scale == False:disparity_left = left_matcher.compute(left_image, right_image)disparity_right = right_matcher.compute(right_image, left_image)else:left_image_down = cv2.pyrDown(left_image)right_image_down = cv2.pyrDown(right_image)factor = left_image.shape[1] / left_image_down.shape[1]disparity_left_half = left_matcher.compute(left_image_down, right_image_down)disparity_right_half = right_matcher.compute(right_image_down, left_image_down)disparity_left = cv2.resize(disparity_left_half, size, interpolation=cv2.INTER_AREA)disparity_right = cv2.resize(disparity_right_half, size, interpolation=cv2.INTER_AREA)disparity_left = factor * disparity_leftdisparity_right = factor * disparity_right# 真实视差(因为SGBM算法得到的视差是×16的)trueDisp_left = disparity_left.astype(np.float32) / 16.trueDisp_right = disparity_right.astype(np.float32) / 16.return trueDisp_left, trueDisp_rightdef getDepthMapWithQ(disparityMap: np.ndarray, Q: np.ndarray) -> np.ndarray:points_3d = cv2.reprojectImageTo3D(disparityMap, Q)depthMap = points_3d[:, :, 2]reset_index = np.where(np.logical_or(depthMap < 0.0, depthMap > 65535.0))depthMap[reset_index] = 0return depthMap.astype(np.float32)if __name__ == '__main__':# 读取图片iml = cv2.imread('L28.png', 1) # 左图imr = cv2.imread('R28.png', 1) # 右图if (iml is None) or (imr is None):print("Error: Images are empty, please check your image's path!")sys.exit(0)height, width = iml.shape[0:2]# 读取相机内参和外参# 使用之前先将标定得到的内外参数填写到stereoconfig.py中的StereoCamera类中config = stereoconfig.stereoCamera()print(config.cam_matrix_left)# 立体校正map1x, map1y, map2x, map2y, Q = getRectifyTransform(height, width, config) # 获取用于畸变校正和立体校正的映射矩阵以及用于计算像素空间坐标的重投影矩阵iml_rectified, imr_rectified = rectifyImage(iml, imr, map1x, map1y, map2x, map2y)print(Q)# 绘制等间距平行线,检查立体校正的效果line = draw_line(iml_rectified, imr_rectified)cv2.imwrite('check_rectification.png', line)# 立体匹配iml_, imr_ = preprocess(iml, imr) # 预处理,一般可以削弱光照不均的影响,不做也可以disp, _ = stereoMatchSGBM(iml, imr, False) # 这里传入的是未经立体校正的图像,因为我们使用的middleburry图片已经是校正过的了cv2.imwrite('disaprity.png', disp * 4)fx = config.cam_matrix_left[0, 0]fy = fxcx = config.cam_matrix_left[0, 2]cy = config.cam_matrix_left[1, 2]print(fx, fy, cx, cy)# 计算像素点的3D坐标(左相机坐标系下)points_3d = cv2.reprojectImageTo3D(disp, Q) # 参数中的Q就是由getRectifyTransform()函数得到的重投影矩阵# 设置想要检测的像素点坐标(x,y)x=640y=360print('x:',points_3d[int(y), int(x), 0],'y:',points_3d[int(y), int(x), 1],'z:',points_3d[int(y), int(x), 2]) # 得出像素点的三维坐标,单位mmprint('distance:',(points_3d[int(y), int(x), 0] ** 2 + points_3d[int(y), int(x), 1] ** 2 + points_3d[int(y), int(x), 2] ** 2) ** 0.5) # 计算距离,单位mm
大致就写到这里,有问题可以在评论区讨论
相关文章:
双目三维测距(python)
文章目录 1. 双目检测1.1 调用相机1.2 分割画面 2. 双目标定2.1 相机标定2.2 获取参数 3. 双目测距3.1 立体校正3.1.1 校正目的3.1.2 校正方法3.1.2 相关代码 3.2 立体匹配和视差计算3.3 深度计算3.4 注意事项 4. 完整代码 代码打包下载: 链接1:https://…...

数据结构|二叉树的三种遍历方式,你掌握了几种?
目录 1、遍历方式 2、前序遍历 3、中序遍历 1、遍历方式 学习二叉树的结构,最简单的方式就是遍历二叉树。遍历二叉树就是通过某条线路对二叉树的各个结点进行一次访问,访问的方法有三种分为前序遍历、中序遍历、后续遍历,层序遍历它们的遍…...
Direct3D 12——灯光——法向量
a:平面法线着色 b:顶点法线着色 c:像素着色 平面法线(face normal,由于在计算机几何学中法线是有方向的向量,所以也有将normal译作法向量) 是 一种描述多边形朝向(即正交于多边形上所有点)的单位向量。 曲面法线&a…...
)
软考-信息系统工程(五)
信息系统工程 Garlan和Shaw对通用软件架构风格进行了分类,他们将软件架构分为:(曾经考过1分选择题 区分) 数据流风格:数据流风格包括批处理序列和管道/过滤器两种风格。调用/返回风格:调用/返回风格包括主程序/子程序、数据抽象和面向对象,以及层次结构…...
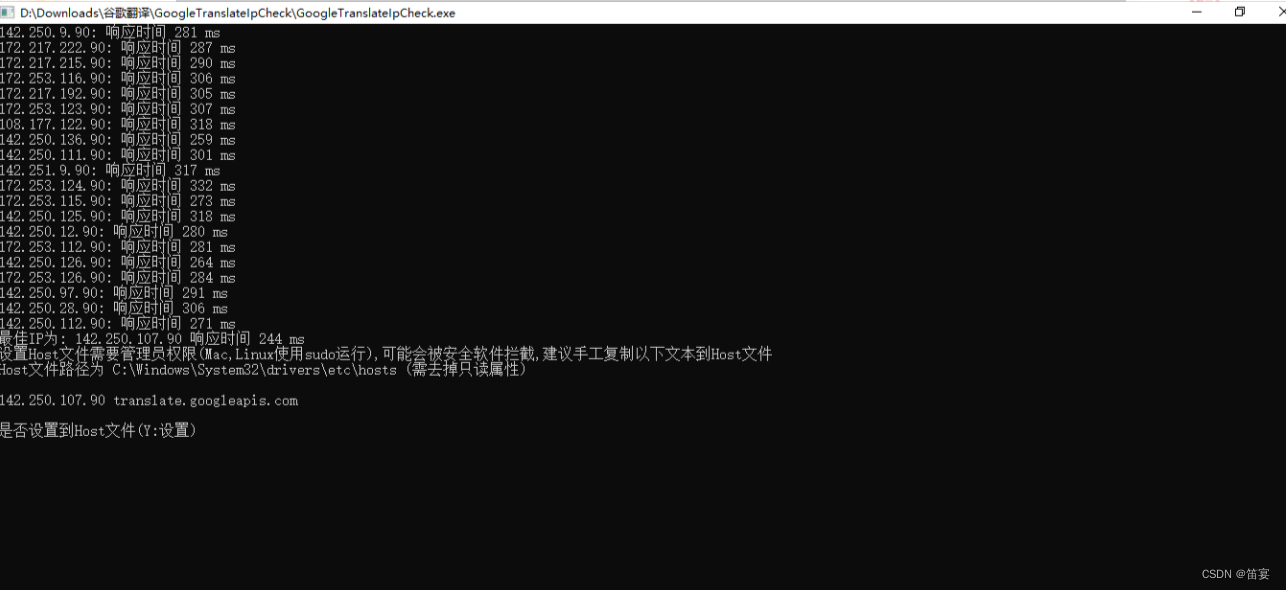
解决谷歌翻译不能使用的问题
今天登录国外网站,发现谷歌翻译已无法正常使用,网上最多的方法就是更改host文件,在host内增加ip地址,但是经常失效,经常手动更改增加ip着实烦恼,还有可能有别的错误。 最终解决方式是:登录GitH…...
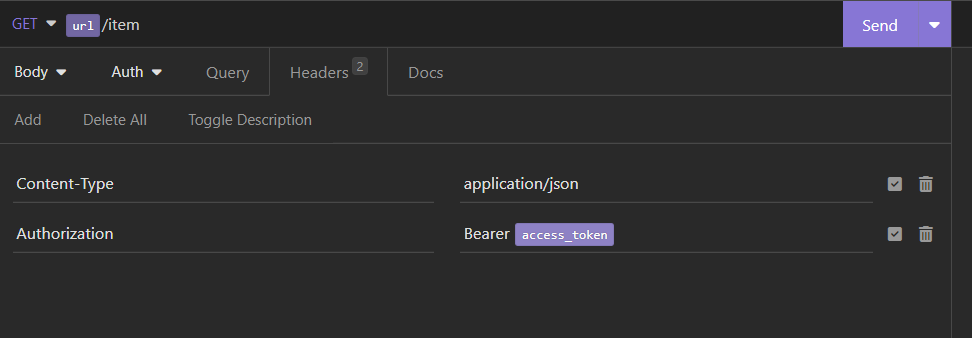
Insomnia 简单使用方法
文章目录 1. 新建工程2. 新建若干文件夹3. 设置环境变量4. 授权以及进行请求的链式调用 (chaining requests)4. 1 解决办法 14. 2 解决办法 2 Insomnia 同 Postman, 用于测试后端 endpoint,很容易使用。 使用步骤如下: 1. 新建工程 2. 新建若…...

2023接口自动化测试,完整入门篇
1. 什么是接口测试 顾名思义,接口测试是对系统或组件之间的接口进行测试,主要是校验数据的交换,传递和控制管理过程,以及相互逻辑依赖关系。其中接口协议分为HTTP,WebService,Dubbo,Thrift,Socket等类型,测试类型又主…...
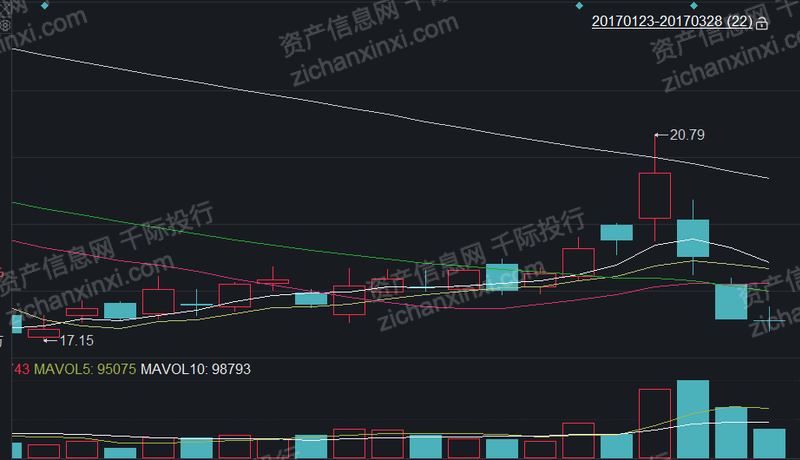
2023年股票代持行业研究报告
第一章 股票代持概述 1.1 基本概念 股票代持,或称委托持股,是指实际出资人与名义出资人达成以下约定:名义出资人作为名义股东,在股东名册等公司工商登记信息上出现,而实际上由实际出资人出资并享有投资权益。 股票代…...
《Netty》从零开始学netty源码(三十九)之PoolSubPage的内存分配
目录 PoolSubPage.allocategetNextAvail方法toHandle方法removeFromPool方法 PoolSubPage.allocate 上一篇我们介绍了PoolSubPage的简单知识,当我们需要PoolSubPage的内存时可调用allocate方法查找可分配二进制的位置,具体的源码过程如下: …...

【目标检测论文阅读笔记】Reducing Label Noise in Anchor-Free Object Detection
(Augmentation for small object detection) Abstract 当前的 anchor-free无锚目标检测器 将空间上落在真值框预定义中心区域内的所有特征标记为正。这种方法会在训练过程中产生 标签噪声,因为这些 正标记的特征中的一些 可能位于背景或遮挡…...

金融数字新型基础设施创新开放联合体今日成立
4月18日,“金融数字新型基础设施创新开放联合体”(以下简称:联合体)在上海成立。联合体由上海银行、复旦大学金融科技研究院、中电金信共同发起,首批成员单位汇聚产业链与供给侧的中坚力量:国泰君安证券、太…...

编程语言的发展史
编程语言处在不断的发展和变化中,从最初的机器语言发展到如今的2500种以上的高级语言,每种语言都有其特定的用途和不同的发展轨迹。编程语言并不像人类自然语言发展变化一样的缓慢而又持久,其发展是相当快速的,这主要是计算机硬件…...

巧用千寻位置GNSS软件|点测量采集技巧
点测量是测量中重要的节点,在测量工作的信息处理分析中发挥着重要作用。本期将给各位带来使用千寻位置GNSS软件采集地形点、控制点、快速点、连续点、房角点和倾斜点的操作技巧。 地形点 地形点的设置如图 5.1-9所 示,每次采集一个点,该点需要…...
DHCP原理与配置
目录 一、DHCP工作原理 1)了解DHCP服务 使用DHCP的好处 DHCP的分配方式 2)DHCP的租约过程 分为四个步骤 二、DHCP服务器的配置 1)检查并且安装dhcp有关软件包 2)查看系统的配置文件,并且利用好官方给的参考案…...

软件测试今天你被内卷了吗?
认识一个人,大专学历非计算机专业的,是前几年环境好的时候入的行,那时候软件测试的要求真的很低,他那时好像是报了个班,然后入门的,但学的都是些基础,当时的他想的也简单,反正也能拿…...

做完自动化测试,但别让不会汇报毁了你...
pytest 是一个成熟的全功能Python测试工具,可以帮助您编写更好的程序。它与 python 自带的 unittest 测试框架类似,但 pytest 使用起来更简洁和高效,并且兼容 unittest 框架。pytest 能够支持简单的单元测试和复杂的功能测试,pyte…...
企业级信息系统开发讲课笔记2.4 利用MyBatis实现条件查询
文章目录 零、本节学习目标一、查询需求二、打开MyBatisDemo项目三、对学生表实现条件查询(一)创建学生映射器配置文件(二)配置学生映射器文件(三)创建学生映射器接口(四)测试学生映…...
)
【天梯赛—不想坑队友系列】L2-003 月饼(java)
目录 第一题: L2-003 月饼 输入格式: 输出格式: 输入样例: 输出样例: 题目分析 题目代码 第二题:德才论 输入格式: 输出格式: 输入样例: 输出样例ÿ…...
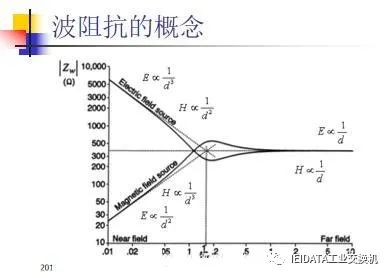
电磁兼容(EMC)的标准与测试内容
在国际范围上,电磁兼容标准的制定已经有了70多年的发展历程,最早为了保护无线电通信和广播,国际无线电干扰特别委员会(CISPR)对各种用电设备和系统提出了相关的电磁干扰发射限值和测量方法。到了20世纪60~7…...

滑动平均算法
class Solution { public static int[] maxSlidingWindow(int[] nums, int k) { int right 0; int[] res new int[nums.length -k 1]; int index0; LinkedList<Integer> list new LinkedList<>(); // 开始构造窗口 …...

如何高效修复损坏视频:专业MP4恢复工具untrunc实战指南
如何高效修复损坏视频:专业MP4恢复工具untrunc实战指南 【免费下载链接】untrunc Restore a truncated mp4/mov. Improved version of ponchio/untrunc 项目地址: https://gitcode.com/gh_mirrors/un/untrunc 你是否曾因视频文件意外损坏而痛心疾首ÿ…...

深度解析SacreBLEU:构建机器翻译评估的标准化技术栈
深度解析SacreBLEU:构建机器翻译评估的标准化技术栈 【免费下载链接】sacrebleu Reference BLEU implementation that auto-downloads test sets and reports a version string to facilitate cross-lab comparisons 项目地址: https://gitcode.com/gh_mirrors/sa…...

基于Next.js与Shadcn/ui的现代Web仪表盘开发实战指南
1. 项目概述与核心价值 最近在折腾一个开源项目,叫 openclaw-dashboard ,是 anis-marrouchi 大佬在 GitHub 上开源的一个仪表盘项目。光看名字,你可能会觉得这又是一个平平无奇的“又一个仪表盘”,但实际深入把玩之后&#x…...

Perplexity营养响应延迟超8秒?3分钟完成本地缓存+USDA API直连双模加速配置
更多请点击: https://kaifayun.com 第一章:Perplexity营养饮食查询 Perplexity 是一款基于大语言模型的实时信息检索工具,其核心优势在于能结合权威来源(如 USDA FoodData Central、PubMed、WHO 指南)对营养学问题进行…...

终极免费Redis可视化工具:Windows版RedisDesktopManager完全指南
终极免费Redis可视化工具:Windows版RedisDesktopManager完全指南 【免费下载链接】RedisDesktopManager-Windows RedisDesktopManager Windows版本 项目地址: https://gitcode.com/gh_mirrors/re/RedisDesktopManager-Windows 你是否厌倦了在命令行中操作Red…...

对比自行维护多个API与使用Taotoken聚合平台在运维复杂度上的差异
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 对比自行维护多个API与使用Taotoken聚合平台在运维复杂度上的差异 在构建基于大模型的应用时,开发者常常需要接入多个不…...

基于NVIDIA Jetson Nano的无人机边缘AI系统:从架构设计到自主跟踪实战
1. 项目概述:当无人机遇上边缘AI大脑几年前,当我第一次把一块NVIDIA Jetson Nano塞进一架450轴距的无人机机架里,看着它仅凭机载摄像头就识别出前方的障碍物并自主绕开时,那种兴奋感至今记忆犹新。这不仅仅是给无人机加了个“眼睛…...

QQ音乐解析工具终极指南:如何轻松获取全网音乐资源
QQ音乐解析工具终极指南:如何轻松获取全网音乐资源 【免费下载链接】MCQTSS_QQMusic QQ音乐解析 项目地址: https://gitcode.com/gh_mirrors/mc/MCQTSS_QQMusic 你是否厌倦了音乐平台的层层限制?想要畅听所有歌曲却不想支付高昂的会员费ÿ…...

DNS 与 hosts 文件:Windows 11 中的名称解析配置
诸神缄默不语-个人技术博文与视频目录 一个域名会对应多个IP地址,当电脑访问域名时会默认指定访问其中一个IP地址(以下正文会介绍通过hosts文件和DNS服务器选择指定映射的IP的原理),总之有时我们可能会需要将域名对应的IP地址指定…...
)
YOLOv8安全帽识别检测系统(项目源码+YOLO数据集+模型权重+UI界面+python+深度学习+环境配置)
摘要 为有效监测施工现场安全帽佩戴情况,本研究基于YOLOv8目标检测算法构建了一套安全帽检测系统。数据集共包含5000张图像,涵盖helmet(安全帽)与head(未戴安全帽的头部)两类目标,其中训练集35…...