【ROS仿真实战】获取机器人在gazebo位置真值的三种方法(三)
文章目录
- 前言
- 一. 使用ROS tf库
- 二、 使用Gazebo Model Plugin
- 三、 使用libgazebo_ros_p3d插件
- 四、总结
前言
在ROS和Gazebo中,获取机器人的位置信息通常通过ROS消息传递进行。在这篇文章中,我们将介绍三种获取机器人在Gazebo中位置真值的方法:使用ROS tf库、使用自己编写Gazebo Model Plugin以及libgazebo_ros_p3d Plugin。

一. 使用ROS tf库
ROS tf库是ROS中用于管理坐标变换的库,它可以通过ROS消息传递来管理不同坐标系之间的关系。在Gazebo中,每个模型都有一个本地坐标系(local coordinate system),这个坐标系的原点通常位于模型的重心。模型的本地坐标系可以通过SDF文件或URDF文件定义。在Gazebo中,机器人也是一个模型,因此可以通过ROS tf库来获取机器人的位置信息。
以下是获取机器人在Gazebo中位置信息的步骤:
- 在机器人控制程序中,通过tf监听器(tf listener)订阅tf变换消息(tf transform message)。
#include <ros/ros.h>
#include <tf/transform_listener.h>int main(int argc, char** argv) {ros::init(argc, argv, "robot_position");ros::NodeHandle nh;tf::TransformListener listener;while (ros::ok()) {tf::StampedTransform transform;try {listener.lookupTransform("world", "base_link", ros::Time(0), transform);} catch (tf::TransformException& ex) {ROS_ERROR("%s", ex.what());ros::Duration(1.0).sleep();continue;}double x = transform.getOrigin().x();double y = transform.getOrigin().y();double z = transform.getOrigin().z();ROS_INFO("Robot position: x=%f, y=%f, z=%f", x, y, z);ros::spinOnce();}return 0;
}
-
在lookupTransform函数中指定目标坐标系和源坐标系。在这个例子中,目标坐标系是"world",表示机器人在地图坐标系中的位置。源坐标系是"base_link",表示机器人本身的坐标系。
-
通过调用getOrigin函数获取机器人在目标坐标系中的位置。
需要注意的是,机器人控制程序中必须先启动tf监听器,否则程序会无法订阅到tf变换消息。
二、 使用Gazebo Model Plugin
另一种获取机器人在Gazebo中位置信息的方法是使用Gazebo Model Plugin。Gazebo Model Plugin是一种可以附加到Gazebo模型上的插件,可以在模拟过程中对模型进行控制和监测。
以下是使用Gazebo Model Plugin获取机器人在Gazebo中位置信息的步骤:
- 编写Gazebo Model Plugin
首先,我们需要编写一个Gazebo Model Plugin,用于订阅机器人在Gazebo中的位姿信息,并将其发布到ROS话题中。在这个例子中,我们使用的是Gazebo提供的ModelPlugin。
下面是一个简单的例子,演示如何获取机器人在Gazebo中的位置信息,并将其发布到ROS话题中:
#include <gazebo/common/Plugin.hh>
#include <gazebo/physics/physics.hh>
#include <ros/ros.h>
#include <geometry_msgs/PoseStamped.h>namespace gazebo {class RobotPlugin : public ModelPlugin {public:RobotPlugin() {}void Load(physics::ModelPtr _parent, sdf::ElementPtr _sdf) override {// 获取机器人模型model_ = _parent;// 初始化ROS节点ros::NodeHandle nh;// 创建一个ROS发布器,发布机器人的位置信息pose_pub_ = nh.advertise<geometry_msgs::PoseStamped>("/robot_pose", 10);// 创建一个Gazebo回调函数,用于在每个仿真步骤中获取机器人的位姿信息update_connection_ = gazebo::event::Events::ConnectWorldUpdateBegin(boost::bind(&RobotPlugin::OnUpdate, this));}private:void OnUpdate() {// 获取机器人的位姿信息auto pose = model_->WorldPose();// 将位姿信息转换为ROS消息类型geometry_msgs::PoseStamped pose_msg;pose_msg.header.frame_id = "world";pose_msg.header.stamp = ros::Time::now();pose_msg.pose.position.x = pose.Pos().X();pose_msg.pose.position.y = pose.Pos().Y();pose_msg.pose.position.z = pose.Pos().Z();pose_msg.pose.orientation.x = pose.Rot().X();pose_msg.pose.orientation.y = pose.Rot().Y();pose_msg.pose.orientation.z = pose.Rot().Z();pose_msg.pose.orientation.w = pose.Rot().W();// 发布机器人的位姿信息pose_pub_.publish(pose_msg);}// 机器人模型physics::ModelPtr model_;// ROS发布器,用于发布机器人的位置信息ros::Publisher pose_pub_;// Gazebo回调函数,用于在每个仿真步骤中获取机器人的位姿信息gazebo::event::ConnectionPtr update_connection_;
};GZ_REGISTER_MODEL_PLUGIN(RobotPlugin)} // namespace gazebo
- 编译和运行
编译上述代码,可以使用Catkin工作空间进行编译。在Catkin工作空间的根目录下,创建一个名为“src”的目录,然后将上述代码复制到“src”目录下。接下来,使用以下命令编译代码:
catkin_make
接下来,可以在.launch文件中添加gazebo_ros包,并启动Gazebo仿真环境,启动ROS节点:
<launch><arg name="model" default="robot"/><include file="$(find gazebo_ros)/launch/empty_world.launch"><arg name="world_name" value="$(find my_robot)/worlds/my_world.world"/><arg name="paused" value="false"/><arg name="use_sim_time" value="true"/><arg name="gui" value="true"/><arg name="headless" value="false"/><arg name="debug" value="false"/></include><node name="gazebo_model_publisher" pkg="my_robot" type="gazebo_model_publisher" output="screen"><param name="model" value="$(arg model)"/><param name="topic" value="/robot_pose"/></node>
</launch>
在上面的.launch文件中,首先包含了gazebo_ros包的empty_world.launch文件,并传递了相关参数,启动Gazebo仿真环境。然后,启动一个节点gazebo_model_publisher,这个节点是我们自己编写的Gazebo Model Plugin,通过订阅机器人的位置信息并将其发送到ROS话题中。
运行.launch文件:
roslaunch my_robot gazebo_model_publisher.launch
此时,机器人在Gazebo中的位置信息将会以ROS话题的形式发布,可以使用rostopic命令查看:
rostopic echo /robot_pose
这样,我们就可以通过Gazebo Model Plugin获取机器人在Gazebo中的位置信息了。
三、 使用libgazebo_ros_p3d插件
libgazebo_ros_p3d是一个用于在Gazebo仿真环境中发布三维位置和速度信息的ROS插件库。该插件可以使ROS节点通过ROS话题订阅机器人的三维位置和速度信息,并将其发布到Gazebo仿真环境中,使得机器人的运动可以在仿真环境中被准确地模拟和显示。
该插件通过Gazebo中的物理引擎模拟机器人的运动,并将模拟结果转换成ROS消息发布到ROS话题中。该插件可以很方便地与其他ROS节点和包进行集成,实现对机器人运动的控制和监控。
使用libgazebo_ros_p3d插件需要在Gazebo模型文件中添加插件的配置,并在ROS节点中订阅插件发布的ROS话题。插件配置中需要指定插件的名称、参考框架、更新频率等参数,以及要发布的三维位置和速度信息的名称和单位。
<!-- Fake localization plugin --><plugin name="ground_truth_odometry" filename="libgazebo_ros_p3d.so"><alwaysOn>true</alwaysOn><updateRate>100.0</updateRate><bodyName>base_link</bodyName><topicName>base_pose_ground_truth</topicName><gaussianNoise>0.01</gaussianNoise><frameName>map</frameName>--><!-- initialize odometry for fake localization--><xyzOffsets>0 0 0</xyzOffsets><rpyOffsets>0 0 0</rpyOffsets></plugin>
编写节点订阅话题/gazebo/model_states,找到对应模型的名称即可,例如机器人名称为turtlebot3。
void _modelStatesCallback(const gazebo_msgs::ModelStatesConstPtr &msg)
{int modelCount = msg->name.size();for(int modelInd = 0; modelInd < modelCount; ++modelInd){if(msg->name[modelInd] == "turtlebot3"){_current_pose.pose = msg->pose[modelInd];_current_velocity.twist = msg->twist[modelInd];break;}}
}
在ROS机器人算法开发和测试过程中,libgazebo_ros_p3d插件可以帮助开发人员在仿真环境中快速、准确地获取机器人的位置和速度信息,方便进行算法开发和测试。
四、总结
总的来说,在进行ROS机器人算法开发和测试时,获取机器人在Gazebo中位置信息的基本步骤是通过订阅ROS话题或使用插件提供的接口来获取机器人位置信息,并将其发送到ROS话题中。选择适合自己的方法,根据实际需求和问题进行调试和优化是非常重要的。无论使用哪种方法,这个基本步骤都是相同的,只是具体实现方式会有所不同。因此,在使用Gazebo进行ROS机器人算法开发和测试时,需要根据实际情况选择合适的方法来获取机器人的位置信息。
相关文章:
【ROS仿真实战】获取机器人在gazebo位置真值的三种方法(三)
文章目录 前言一. 使用ROS tf库二、 使用Gazebo Model Plugin三、 使用libgazebo_ros_p3d插件四、总结 前言 在ROS和Gazebo中,获取机器人的位置信息通常通过ROS消息传递进行。在这篇文章中,我们将介绍三种获取机器人在Gazebo中位置真值的方法࿱…...
——FontDialog(史上最全))
Winform从入门到精通(35)——FontDialog(史上最全)
文章目录 前言一、属性1、Name2、AllowScriptChange3、AllowSimulations4、AllowVectorFonts5、AllowVerticalFonts6、Color7、FixedPitchOnly8、Font9、FontMustExist10、MaxSize11、MinSize12、 ScriptsOnly13、ShowApply14、ShowColor15、ShowEffects16、ShowHelp...

AcWing 854. Floyd求最短路Floyd模板
Floyd算法: 标准弗洛伊德算法,三重循环,基于动态规划。 循环结束之后 d[i][j]存储的就是点 i 到点 j 的最短距离。 需要注意循环顺序不能变:第一层枚举中间点,第二层和第三层枚举起点和终点。 特点: 1.复杂…...
Graph Theory(图论)
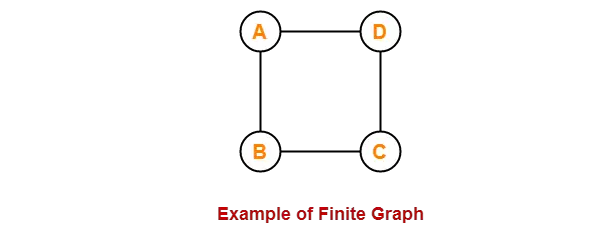
一、图的定义 图是通过一组边相互连接的顶点的集合。 In this graph, V { A , B , C , D , E } E { AB , AC , BD , CD , DE } 二、图的类型 2.1 Finite Graph A graph consisting of finite number of vertices and edges is called as a finite graph. Null Graph Tri…...

[Python]生成 txt 文件
前段时间有位客户问: 你们的程序能不能给我们生成个 txt 文件,把新增的员工都放进来,字段也不需要太多,就要 员工姓名/卡号/员工编号/员工职位/公司 这些字段就行了,然后我们的程序会去读取这个 txt 文件,拿里面的内容,读完之后会这个文件删掉 我: 可以接受延迟吗?可能没办法实…...

GeoTools实战指南: 自定义矢量样式并生成截图
GeoTools实战指南: 自定义矢量样式并生成截图 介绍 本段代码的主要功能是将矢量数据(Shapefile)渲染成一张图片。 准备环境 首先,您需要将GeoTools库添加到您的项目中。使用Maven或Gradle添加依赖项,或者直接下载GeoTools的jar文件并添加到您的类路径中。 Maven <…...

深度学习超参数调整介绍
文章目录 深度学习超参数调整介绍1. 学习率2. 批大小3. 迭代次数4. 正则化5. 网络结构总结 深度学习超参数调整介绍 深度学习模型的性能很大程度上取决于超参数的选择。超参数是指在训练过程中需要手动设置的参数,例如学习率、批大小、迭代次数、网络结构等等。选择…...
Bootloader
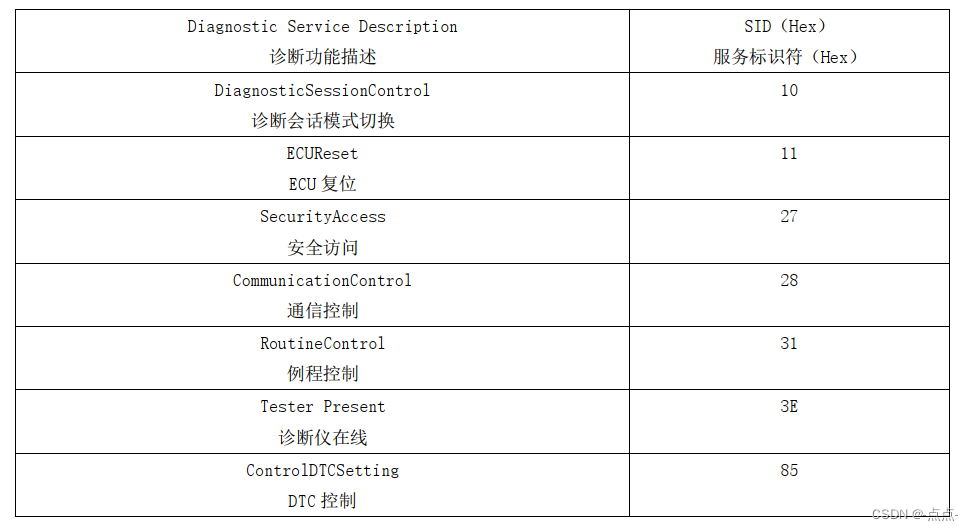
本篇不作太过的技术了解,仅可作为初学者的参考。用嘴简单的语言讲清楚一件事。 项目中遇到Bootloader升级MCU,我很好这是什么软件,逻辑是什么,怎么升级的。 术语及定义 指纹信息fingerprint诊断仪用于标识特定的下载尝试的信息 …...

安卓开发_广播机制_广播的最佳实践:实现强制下线功能
安卓开发_广播机制_广播的最佳实践:实现强制下线功能 ActivityCollector类用于管理所有的ActivityBaseActivity类作为所有Activity的父类创建一个LoginActivity来作为登录界面布局LoginActivity 在MainActivity中加入强制下线功能布局MainActivity在BaseActivity中注…...
国民技术N32G430开发笔记(10)- IAP升级 Application 的制作
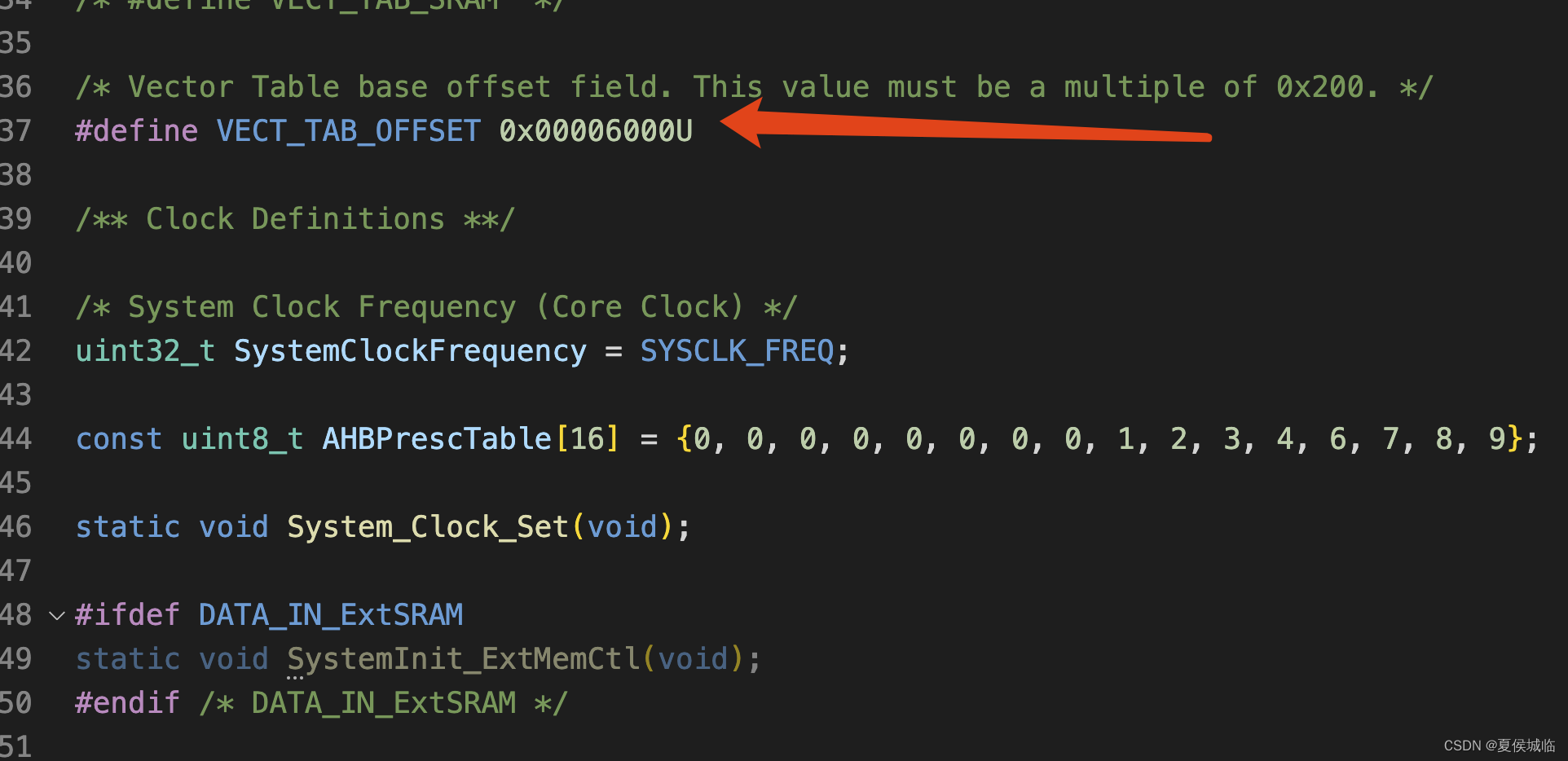
IAP升级 Application 的制作 1、App程序跟Bootloader程序最大的区别就是, 程序的执行地址变成了之前flash设定的0x08006000处, 大小限制为20KB 所以修改Application工程的ld文件 origin 改成 0x08006000 length 改成0x5000 烧录是起始地址也要改为x0x…...
[计算机图形学]材质与外观(前瞻预习/复习回顾)
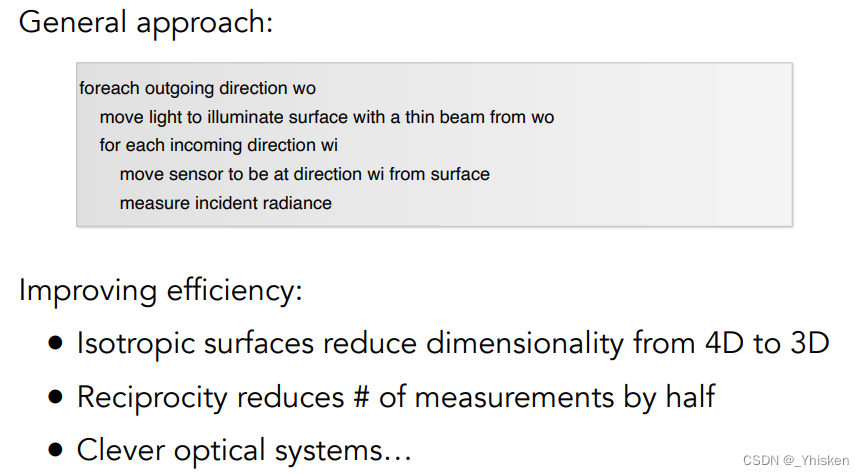
一、图形学中的材质 不同的物体表面有着不同的材质,而不同的材质意味着它们与光线的作用不同。那么我们之前在介绍辐射度量学和渲染方程提到过其中一个函数,叫做BRDF,而在实际上,也就是BRDF定义了不同的材质。BRDF决定了光如何被反…...
Java 的简要介绍及开发环境的搭建(超级详细)
图片来源于互联网 目录 | CONTENT Java 简介 一、什么是 Java 二、认识 Java 版本 三、选择哪个版本比较好 搭建 Java 开发环境 一、下载 Java 软件开发工具包 JDK 二、配置环境变量 自动配置 手动配置 三、下载合适的 IDE IntelliJ IDEA Visual Studio Code Eclip…...

每天一道算法练习题--Day15 第一章 --算法专题 --- -----------二叉树的遍历
概述 二叉树作为一个基础的数据结构,遍历算法作为一个基础的算法,两者结合当然是经典的组合了。很多题目都会有 ta 的身影,有直接问二叉树的遍历的,有间接问的。比如要你找到树中满足条件的节点,就是间接考察树的遍历…...

golang - 函数的使用
核心化编程 为什么需要函数? 代码冗余问题不利于代码维护函数可以解决这个问题 函数 函数:为完成某一功能的程序指令(语句)的集合,称为函数 在 Go 中,函数分为:自定义函数(自己写…...

真题详解(极限编程)-软件设计(六十一)
真题详解(二分查找平均值)-软件设计(六十)https://blog.csdn.net/ke1ying/article/details/130417464 VLANtag属于 数据链路层实现。 数据链路层:网桥交换机。 网络层:路由器。 物理层:中继器。 Telent…...

计算机网络笔记:TCP粘包
默认情况下, TCP 连接会启⽤延迟传送算法 (Nagle 算法), 在数据发送之前缓存他们. 如果短时间有多个数据发送, 会缓冲到⼀起作⼀次发送 , 这样可以减少 IO 消耗提⾼性能。 如果是传输⽂件的话, 那么根本不⽤处理粘包的问题, 来⼀个包拼⼀个包就好了。但是如果是多条消息, 或者…...

Vue(标签属性:ref、配置项:props、混入mixin、插件、样式属性:scroped)
一、ref(打标识) 前面提及到了标签属性:keys 这里将了解ref:打标识 正常布置脚手架并创建入口文件main.js,引入组件 1. 可以给元素注册引用信息(获取真实DOM) 给一个按钮获取上方的dom的方法,方…...
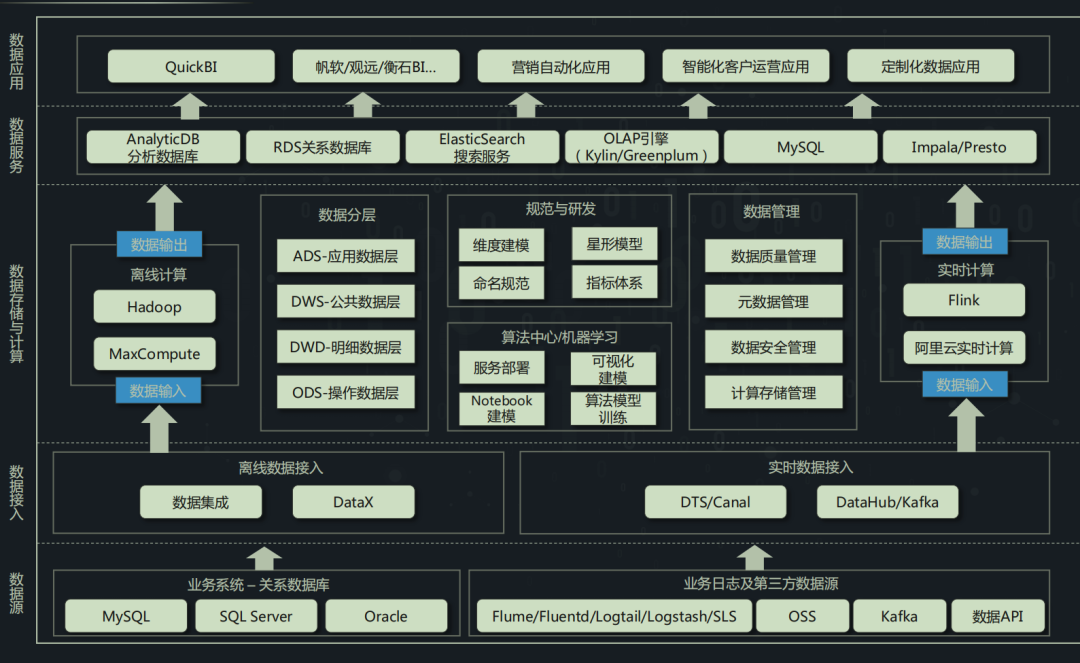
数仓建设规划核心问题!
小A进入一家网约车出现服务公司,负责公司数仓建设,试用期主要一项 OKR是制定数据仓库建设规划;因此小 A 本着从问题出发为原点,先对公司数仓现状进行一轮深入了解,理清存在问题,然后在以不忘初心原则提出解…...

容器镜像的导入导出
容器镜像的导入导出 第1关:导入导出容器 任务描述 本关任务是学习导入导出容器,要求学习者参照示例完成将busyboxContainer容器的文件系统保存为一个tar包,通过该tar包导入一个busybox:v1.0镜像。 相关知识 将 "容器的文件系统&…...

Java每日一练(20230502)
目录 1. 二叉搜索树的最近公共祖先 🌟🌟 2. 随机分组问题 🌟 3. K 个一组翻转链表 🌟🌟🌟 🌟 每日一练刷题专栏 🌟 Golang每日一练 专栏 Python每日一练 专栏 C/C每日一练…...

高效跨平台网盘直链解析工具:LinkSwift技术实现与部署指南
高效跨平台网盘直链解析工具:LinkSwift技术实现与部署指南 【免费下载链接】Online-disk-direct-link-download-assistant 一个基于 JavaScript 的网盘文件下载地址获取工具。基于【网盘直链下载助手】修改 ,支持 百度网盘 / 阿里云盘 / 中国移动云盘 / …...

小白程序员必看:收藏这份大模型Agent开发学习指南,轻松入门字节跳动暑期实习
本文分享了一位知识星球录友成功上岸字节跳动agent开发暑期实习的经验,包括面试准备、Agent开发学习资源推荐以及字节跳动面试题解析。文章强调了掌握Agent相关知识的重要性,并建议小白程序员学习C、Java或Go等编程语言,通过知识星球中的agen…...

我的Claude Code不再被封号,Taotoken提供了稳定可靠的替代方案
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 我的Claude Code不再被封号,Taotoken提供了稳定可靠的替代方案 作为一名频繁使用Claude Code进行代码生成和审查的个人…...

DaVinci Developer与Configurator Pro联调指南:如何高效设计SWC并集成到ECU工程
DaVinci Developer与Configurator Pro联调实战:从SWC设计到ECU集成的全流程解析 在汽车电子控制单元(ECU)开发领域,工具链的协同效率直接决定了项目进度和质量。作为Vector公司AUTOSAR工具链的核心组件,DaVinci Develo…...

Ix开源平台:基于Kubernetes的私有云与家庭实验室一体化管理方案
1. 项目概述与核心价值最近在折腾一个叫Ix的开源项目,它来自ix-infrastructure这个组织。乍一看这个名字,你可能觉得有点抽象,但如果你对自托管、家庭实验室、私有云或者想找一个更现代、更易用的 TrueNAS 替代品感兴趣,那这个项目…...

基于LLM的长文本摘要工具SumGPT:从原理到本地化部署实战
1. 项目概述:一个为长文本摘要而生的智能工具最近在折腾一些文档处理的工作流,发现一个挺普遍但很烦人的痛点:面对动辄几十页的PDF报告、冗长的会议纪要或是海量的研究论文,想要快速抓住核心要点,简直像大海捞针。手动…...

3个步骤让Windows任务栏图标居中,打造macOS般的桌面体验
3个步骤让Windows任务栏图标居中,打造macOS般的桌面体验 【免费下载链接】TaskbarX Center Windows taskbar icons with a variety of animations and options. 项目地址: https://gitcode.com/gh_mirrors/ta/TaskbarX 你是否厌倦了Windows任务栏图标总是靠左…...

从零构建团队技能仓库:结构化知识管理与VuePress实践
1. 项目概述:一个技能仓库的诞生与价值 最近在整理团队内部的技术资产时,我一直在思考一个问题:如何让那些散落在个人笔记、项目代码片段、会议纪要里的“隐性知识”和“最佳实践”沉淀下来,变成团队可复用、可传承的“显性资产”…...

Bifrost:轻量高效的实时数据同步平台架构与实战
1. 项目概述:Bifrost,一个被低估的现代数据同步利器如果你正在处理跨数据库、跨数据源的数据同步任务,并且对传统ETL工具的笨重、配置复杂感到头疼,那么maximhq/bifrost这个项目绝对值得你花时间深入了解。我第一次接触Bifrost是在…...

VS Code光标主题定制指南:提升开发效率与视觉舒适度
1. 项目概述:一个为开发者量身定制的光标主题集合如果你和我一样,每天有超过8个小时的时间是在代码编辑器里度过的,那么你一定对那个在屏幕上闪烁的光标再熟悉不过了。它不仅仅是文本插入点,更是我们思维在数字世界中的延伸。然而…...