Pixhawk无人机-ArduPilot 软件SITL仿真模拟飞行(SITL+MAVProxy)
1 引言
本人是先看了多个博客实现了:在ubuntu下建立完整的ardupilot开发环境。
该文是基于搭建完编译环境后,也就是搭建好ardupilot的仿真环境实现的。
在文章: 《Pixhawk无人机扩展教程(5)—SITL仿真模拟飞行:开发环境搭建》.中指出:
要进行SITL仿真飞行,需要分以下几步进行:
第一步:搭建Ardupilot开发环境;
第二步:ArduPilot 软件在环仿真SITL(SITL+MAVProxy);
第三步:ArduPilot 软件在环仿真SITL(SITL+Mission Planner或则SITL+QGC);
第四步:ArduPilot 软件在环仿真SITL(SITL+Gazebo三维仿真)
本文实现的是第二步ArduPilot 软件在环仿真SITL(SITL+MAVProxy),接下来我们就可以开始进行仿真.。
官方文档:MAVProxy
官方解释:
1)MAVProxy是基于MAVLink系统的无人机地面站软件包
2)MAVProxy是一个强大的基于命令行的“开发人员”地面站软件。
3)它可以通过附加模块进行扩展,也可以与另一个地面站(如Mission Planner、APM Planner 2、QGroundControl等)进行补充,以提供图形用户界面。
2 实现步骤
第一步:打开终端,把路径转到ArduCopter目录下
cd ardupilot/ArduCopter
第二步:执行命令启动SITL仿真
注意:若是第一次进行仿真,请先运行一下sim_vehicle.py -w,运行正常后,使用Ctrl+C kill这个程序的运行。然后执行如下命令:
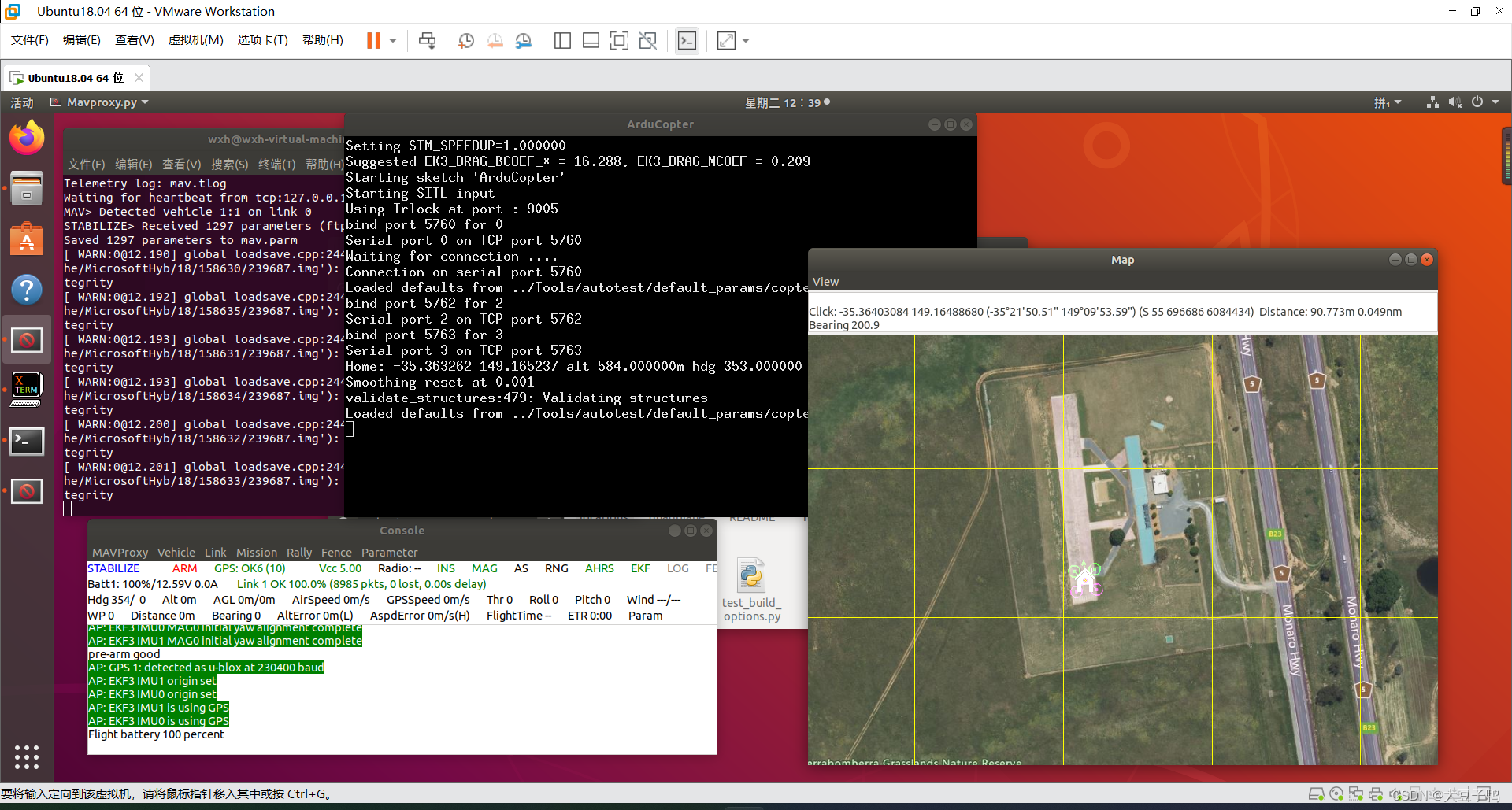
sim_vehicle.py --console --map
启动选项解释:
--console:Load the GUI console module on startup.启动时加载GUI控制台模块。
--map:Load the moving map module on startup.启动时加载移动地图模块。
正常启动后,会出现3个窗口,Terminal、Console和Map 。
出现的问题:
1、注意:如果没有看到map和console窗口。
没有地图,没有控制台,也没有 MAVProxy 命令提示符。看到了这些错误:
Failed to load module: No module named ‘console’. Use ‘set moddebug 3’ in the MAVProxy console to enable traceback Failed to load module: No module named ‘map’. Use ‘set moddebug 3’ in the MAVProxy console to enable traceback
解决问题的帖子:https://github.com/ArduPilot/ardupilot/issues/13357
解决方法一:按照帖子提供的方法,您很可能错过了一些 mavproxy 依赖项,例如 python-wxgtk3.0 。请从http://ardupilot.github.io/MAVProxy/html/index.html检查你是否正确安装了 mavproxy 。
Linux下正确安装mavproxy:
对于基于 Debian 的系统(包括 Ubuntu、WSL、Raspian):
sudo apt-get install python3-dev python3-opencv python3-wxgtk4.0 python3-pip python3-matplotlib python3-lxml python3-pygame
pip3 install PyYAML mavproxy --user
echo 'export PATH="$PATH:$HOME/.local/bin"' >> ~/.bashrc
当我安装python3-pygame,出现错误:python3-pygame 没有可安装候选,然后百度谷歌也搜不到解决办法,我就先把其他包安装上,然后用python-pygame代替了python3-pygame。
解决方法二:可能是由于MAVProxy,pymavlink,future,lxml这几个python包没有安装好,运行下面的命令安装:
sudo -H pip2 install --upgrade MAVProxy pymavlink future lxml
相关文章:
Pixhawk无人机-ArduPilot 软件SITL仿真模拟飞行(SITL+MAVProxy)
1 引言 本人是先看了多个博客实现了:在ubuntu下建立完整的ardupilot开发环境。 该文是基于搭建完编译环境后,也就是搭建好ardupilot的仿真环境实现的。 在文章: 《Pixhawk无人机扩展教程(5)—SITL仿真模拟飞行:开发环境搭建》.中指出&#…...

vue实现深拷贝的方法
在 vue中,深拷贝是一个很有用的功能,在不改变原来对象状态的情况下,进行对象的复制。 但要实现深拷贝,需要两个对象具有相同的属性。如果两个对象不同,深拷贝也不能实现。 1.我们将变量A的属性赋给变量B,但…...
LAMP架构
文章目录 LAMP架构一.简述各组件的主要作用如下: 二.过程展示1.编译安装Apache httpd服务(1)关闭防火墙,将安装Apache所需软件包传到/opt目录下(2)安装环境依赖包(3)配置软件模块(4)编译及安装(5)优化配置文件路径,并把httpd服务的可执行程序…...
javascript基础七:说说你对Javascript中作用域的理解?
一、作用域 作用域,即变量(变量作用域又称上下文)和函数生效(能被访问)的区域或集合 换句话说,作用域决定了代码区块中变量和其他资源的可见性 举个粟子 function myFunction(){let name小爱同学 } undef…...

chatgpt赋能python:Python变量赋值
Python 变量赋值 在 Python 中,我们可以使用多种符号来给变量赋值。本文将介绍这些符号以及它们在编程中的应用。 等号() 在 Python 中,我们最常用的符号是等号(),它可以将一个值赋给一个变量…...
SAP-QM-物料主数据-质量管理视图字段解析
过账到质检库存:要勾选,否则收货后库存不进入质检库存HU检验:收货到启用HU管理的库位时产生检验批,例如某个成品物料是收货到C002库位,该库位启用了HU管理,那么此处要勾选。但是如果勾选了,却收…...
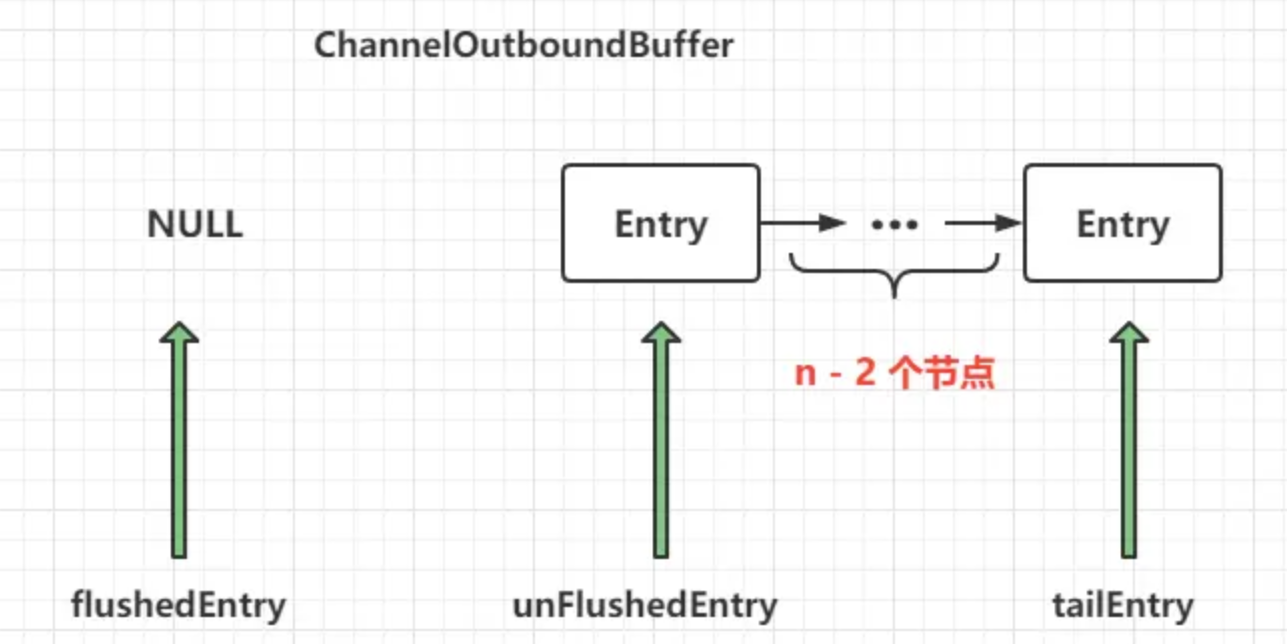
【Netty】一行简单的writeAndFlush都做了哪些事(十八)
文章目录 前言一、源码分析1.1 ctx.writeAndFlush 的逻辑1.2 writeAndFlush 源码1.3 ChannelOutBoundBuff 类1.4 addMessage 方法1.5 addFlush 方法1.6 AbstractNioByteChannel 类 总结 前言 回顾Netty系列文章: Netty 概述(一)Netty 架构设…...

STM32U575 DMA配置
起个摘要,后期维护 1、DMA原理:参考:【STM32】DMA原理,配置步骤超详细,一文搞懂DMA_dma配置_~Old的博客-CSDN博客 2、STM32U575的DMA资源: (datasheet摘要) 3、UART的使用 4、I2…...

14-Vue3快速上手
目录 1.Vue3简介2. Vue3带来了什么2.1 性能的提升2.2 源码的升级2.3 拥抱TypeScript2.4 新的特性 1、海贼王,我当定了!——路飞 2、人,最重要的是“心”啊!——山治 3、如果放弃,我将终身遗憾。——路飞 4、人的梦想是…...

Docker registry 搭建
1、安装 docker 环境 参考:https://mp.csdn.net/mp_blog/creation/editor/104673841 2、准备 registry 镜像 机器有外网访问权限,直接 docker pull registry 通过 docker images 查看本地镜像 3、启动 registry docker run -d -p 5000:5000 --rest…...

关于三维布尔运算的几点思考
目录 三维布尔运算概述三角网格布尔运算效率提升思考BSPTree方式优化 参考 三维布尔运算概述 三维布尔运算根据三维实体数据结构表达分为CSG布尔运算、Brep布尔运算、三角网格布尔运算等类型。这几种类型算法在不同情境下有不同的优势,根据情况进行选择。但这也不能…...

【03.04】大数据教程--html+css基础
当谈到大数据时,HTML和CSS可能并不是最相关的技术。HTML和CSS主要用于构建网页和应用程序的用户界面,而大数据则涉及处理和分析大规模数据集。但是,如果您想展示有关大数据的信息或结果,并在网页上呈现,那么HTML和CSS可…...

深入理解与实践Seata:分布式事务解决方案
✅作者简介:热爱Java后端开发的一名学习者,大家可以跟我一起讨论各种问题喔。 🍎个人主页:Hhzzy99 🍊个人信条:坚持就是胜利! 💞当前专栏:微服务 🥭本文内容&…...
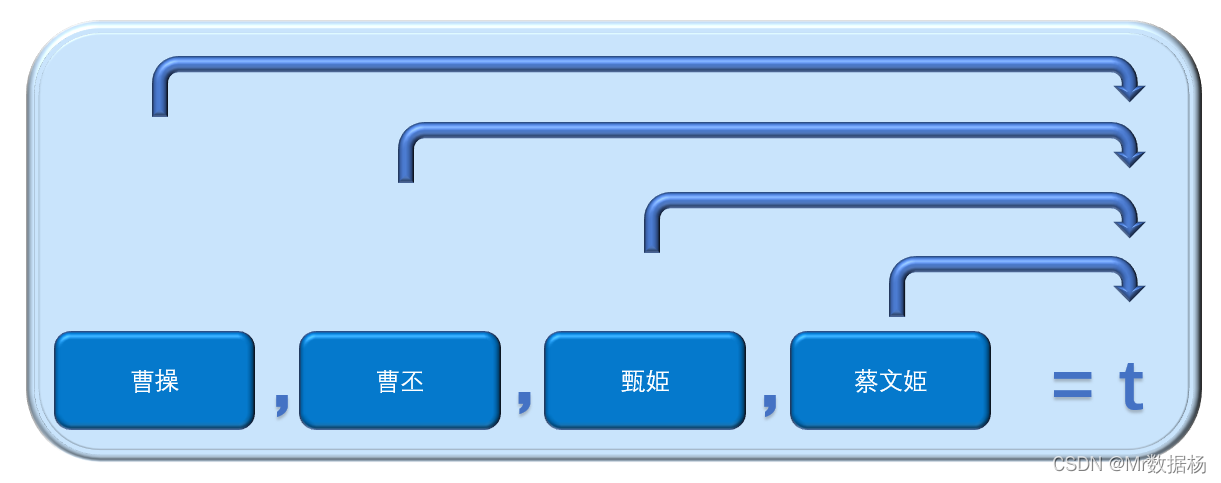
Python学习笔记 - 探索元组Tuple的使用
欢迎各位,我是Mr数据杨,你们的Python导游。今天,我要为大家讲解一段特殊的旅程,它与《三国演义》有关,而我们的主角是元组(tuple)。 让我们想象这样一个场景,三国演义中的诸葛亮&am…...
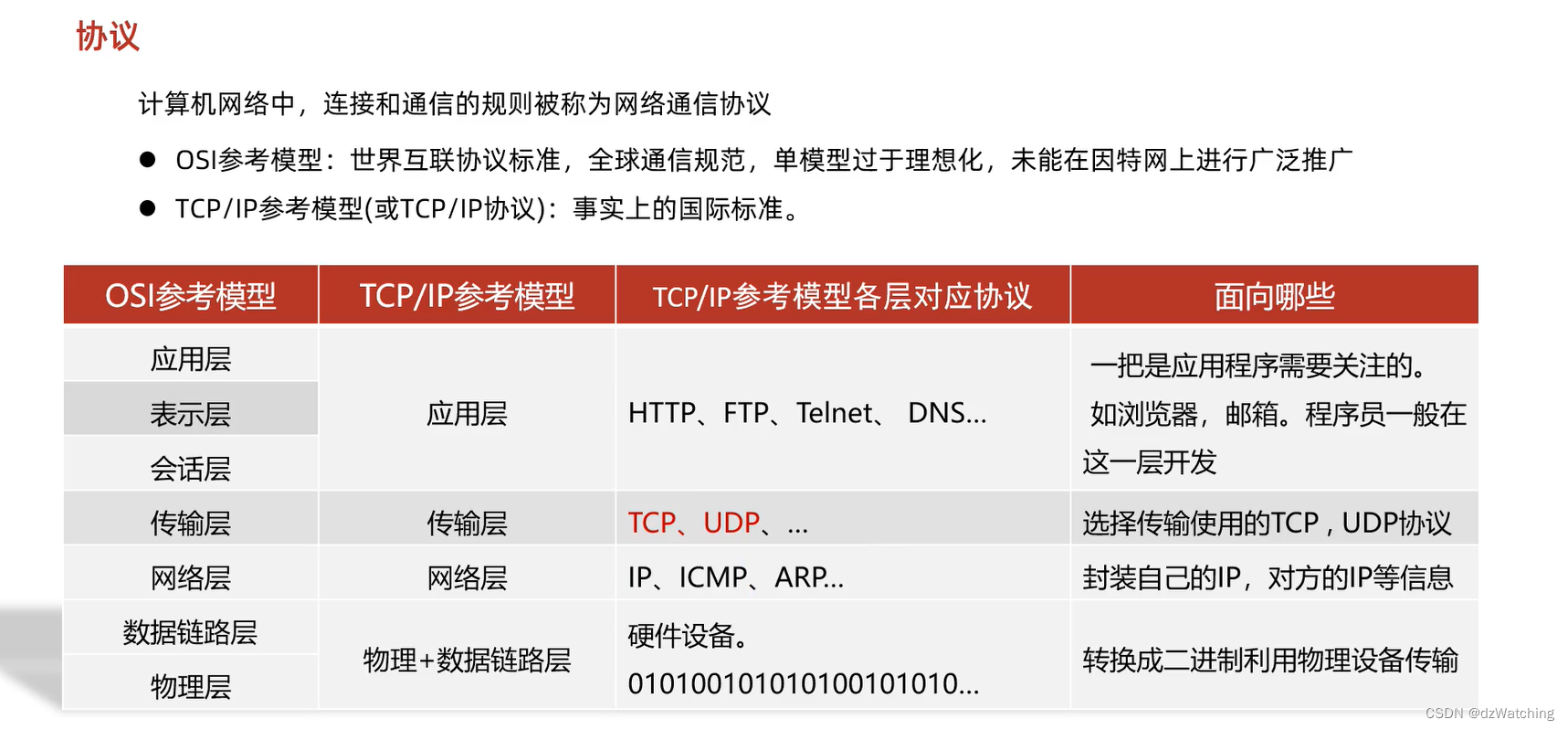
JAVA网络编程(一)
一、什么是网络编程 定义:在网络通信协议下,不同计算机上运行的程序,进行的数据传输。 应用场景:即时通信,网游,邮件等 不管什么场景,都是计算机与计算机之间通过网络在进行数据传输 java提供一…...

Python 线程队列
文章目录 Python 中的线程在 Python 中使用队列限制线程 本篇文章将介绍限制 Python 中的活动线程数。 Python 中的线程 Python 中的线程允许多个执行线程在单个进程中同时运行。 每个线程独立于其他线程运行,允许并发执行并提高性能。 线程对于执行受 I/O 限制或…...

创建web后端程序(servlet程序搭建)
目录 一、Servlet概述 二、创建servlet程序 1.创建类继承HttpServlet 2.重写HttpServlet类中 service、destroy、init方法 3.重新启动服务器 一、Servlet概述 Server Applet的简称,用Java编写的服务器端的程序。它运行在web服务器中,web服务器负责…...
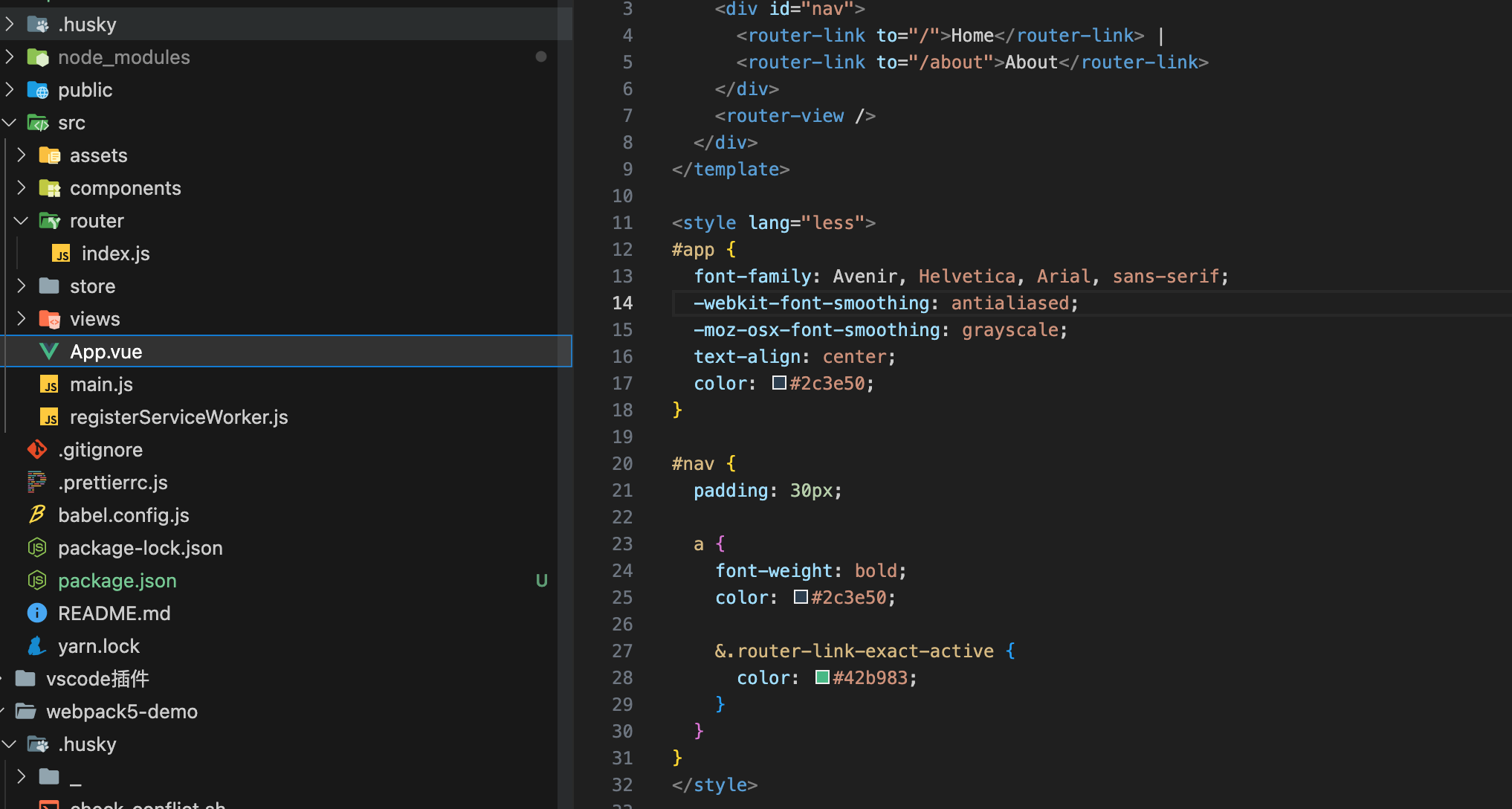
【章节1】git commit规范 + husky + lint-staged实现commit的时候格式化代码
创建项目我们不多说,可以选择默认的,也可以用你们现有的项目。注意章节1和章节2请一起看! 章节1: commit规范 husky lint-staged格式化代码 章节2: husky 检测是否有未解决的冲突 预检查debugger 自动检查是否符合commit规范 前言&#x…...

【入门】拐角III
【入门】拐角III Description 输入整数N,输出相应方阵。 Input 一个整数N。( 0 < n < 10 ) Output 一个方阵,每个数字的场宽为3。 Sample Input 1 5 Sample Output 1 5 5 5 5 55 4 4 4 45 4 3 3 35 4 3 2 25 4…...
如何使用 Fail2ban 防止对 Linux 的暴力攻击?
在当今数字化世界中,网络安全成为了一个极其重要的话题。Linux 作为一种广泛使用的操作系统,也面临着各种网络攻击的风险,包括暴力攻击、密码破解和恶意登录等。为了保护 Linux 系统的安全,我们可以使用 Fail2ban 这样的工具来防止…...
漏洞原理与漏洞复现(基于vulhub))
log4j2(CVE-2021-44228)漏洞原理与漏洞复现(基于vulhub)
声明:部分内容来源于网络,如若侵权请联系删除 什么是log4j2? Log for Java,Apache的开源日志记录组件,是一个Java的日志记录工具。在log4j框架的基础上进行了改进,并引入了丰富的特性,可以控制日志信息输送…...

终极音乐整合方案:用MusicFree插件打造你的专属音乐中心
终极音乐整合方案:用MusicFree插件打造你的专属音乐中心 【免费下载链接】MusicFreePlugins MusicFree播放插件 项目地址: https://gitcode.com/gh_mirrors/mu/MusicFreePlugins 还在为音乐平台会员费烦恼吗?还在忍受不同平台间的歌曲版权割裂吗&…...
)
【Gartner认证实践框架】:AI Agent客服上线前必须完成的12项合规性验证清单(含GDPR/等保2.0/金融信创适配)
更多请点击: https://intelliparadigm.com 第一章:AI Agent客服的合规性验证战略定位 在金融、医疗、电信等强监管行业,AI Agent客服系统不仅需满足功能与体验目标,更须将合规性嵌入其设计、开发与运营全生命周期。合规性验证不是…...

甲言Jiayan:5分钟掌握古汉语NLP终极解决方案
甲言Jiayan:5分钟掌握古汉语NLP终极解决方案 【免费下载链接】Jiayan 甲言,专注于古代汉语(古汉语/古文/文言文/文言)处理的NLP工具包,支持文言词库构建、分词、词性标注、断句和标点。Jiayan, the 1st NLP toolkit designed for Classical C…...

Python实现“打家劫舍“的一种方法
Python实现“打家劫舍“的一种方法 你是一个专业的小偷,计划偷窃沿街的房屋。每间房内都藏有一定的现金,影响你偷窃的唯一制约因素就是相邻的房屋装有相互连通的防盗系统,如果两间相邻的房屋在同一晚上被小偷闯入,系统会自动报警 …...

QLoRA微调Mistral-7B实战:4-bit量化+LoRA端到端跑通指南
1. 这不是理论课,是能跑通的实操手册:QLoRA微调Mistral-7B到底在做什么 你点开这篇,大概率正卡在某个环节:Colab里 model.generate() 报错OOM, bitsandbytes 安装失败后反复重装,或者训练跑了一小时发现…...

MDK中间件与RTOS依赖关系及嵌入式开发实践
1. MDK中间件与RTOS的依赖关系解析在嵌入式开发领域,Keil MDK(Microcontroller Development Kit)是ARM架构微控制器开发的经典工具链。其Middleware(中间件)库为开发者提供了网络协议栈、USB协议栈、文件系统等常用功能…...
)
手把手教你用WSL搞定RAX3000M路由器的SSH配置修改(Win10/Win11适用)
在Windows系统下通过WSL高效配置RAX3000M路由器的完整指南 对于习惯Windows操作系统的技术爱好者来说,想要修改路由器配置文件常常面临一个尴尬的处境——大多数高级配置工具和教程都默认用户已经熟悉Linux环境。本文将彻底解决这个痛点,教你如何在不安装…...

C51编译器内存空间警告解析与指针操作实践
1. 理解C51编译器中的内存空间警告 在Keil C51开发环境中,我们经常会遇到各种内存空间相关的警告和错误。其中"WARNING 259: POINTER: DIFFERENT MSPACE"是一个典型的指针操作问题,它揭示了8051架构下内存管理的特殊性。作为一名长期使用C51的…...

如何用knitAYABInterface创建复杂图案:从JSON文件到针织成品的完整流程
如何用knitAYABInterface创建复杂图案:从JSON文件到针织成品的完整流程 【免费下载链接】knitAYABInterface A Python library with the interface to the AYAB shield. 项目地址: https://gitcode.com/gh_mirrors/ay/knitAYABInterface 想要将数字图案转化为…...