uCOSii信号量的作用
uCOSii中信号量的作用:
在创建信号量时,Sem_Event=OSSemCreate(1)用于分时复用共享资源;
Sem_Event=OSSemCreate(0)用于中断和任务间同步或任务之间的同步。
具体在使用时,需要灵活运用。在访问共享资源时,我喜欢用互斥信号量,爱好不同而已。
一、uCOSii信号量用于对共享资源的保护
1、举例如下:
任务1每隔1小时,将DATA1数据保存到EEPROM。
任务2每隔2小时,将DATA2数据保存到EEPROM。
可见,任务1和任务2都要使用公共资源“写EEPROM”。为了防止使用冲突,我们通过发送信号量和接收信号量来分时操作“写EEPROM”,保证写入正确。
当然也可以放在一个任务里去做,为了了解怎么使用共享资源,这里使用信号量来实现。
2、实现方法:
1)、声明事件指针
OS_EVENT *Sem_Event;//定义一个事件指针
2)、任务1
//函数功能:任务1每隔1小时,将DATA1数据保存到EEPROM。
void SaveDATA1_Task(void *pdata)
{
u16 SaveDATA1_Cnt;
u8 Sem_Err;
while(1)
{
OSTimeDlyHMSM(0,0,0,1000);//延时1秒
SaveDATA1_Cnt++;
if(SaveDATA1_Cnt >3600)//1小时时间到,保存DATA1
{
OSSemPend(Sem_Event,0,&Sem_Err);//等待一个信号量,实现资源保护
EEPROM_U8_Data_Write(DATA1, DATA1_address);
OSSemPost(Sem_Event);//发出一个信号量
SaveDATA1_Cnt =0;
}
}
}
3)、任务2
//函数功能:任务2每隔2小时,将DATA2数据保存到EEPROM。
void SaveDATA2_Task(void *pdata)
{
u16 SaveDATA2_Cnt;
u8 Sem_Err;
while(1)
{
OSTimeDlyHMSM(0,0,0,1000);//延时1秒
SaveDATA2_Cnt++;
if(SaveDATA2_Cnt >7200)//2小时时间到,保存DATA2
{
OSSemPend(Sem_Event,0,&Sem_Err);//等待一个信号量,实现资源保护
EEPROM_U8_Data_Write(DATA2, DATA2_address);
OSSemPost(Sem_Event);//发出一个信号量
SaveDATA2_Cnt =0;
}
}
}
4)、启动任务
void Start_Task(void *pdata)
{
OS_CPU_SR cpu_sr=0;
OS_ENTER_CRITICAL();
//进入临界区(无法被中断打断),需要定义cpu_sr变量
Sem_Event=OSSemCreate(1);
//创建信号量Sem_Event,设置计数器初始值设置为1,即发送了一个信号量。
OSTaskCreate(
SaveDATA1_Task,/* 函数指针*/
(void *)0,/* 建立任务时,传递的参数*/
(OS_STK*)&SaveDATA1_Task_STACK[SaveDATA1_Task_STACK_SIZE-1],
/* 指向堆栈任务栈顶的指针*/
SaveDATA1_Task_PRIORITY/* 任务优先级*/
);
OSTaskCreate(
SaveDATA2_Task,/* 函数指针*/
(void *)0,/* 建立任务时,传递的参数*/
(OS_STK*)&SaveDATA2_Task_STACK[SaveDATA2_Task_STACK_SIZE-1],
/* 指向堆栈任务栈顶的指针*/
SaveDATA2_Task_PRIORITY/* 任务优先级*/
);
OSTaskDel(OS_PRIO_SELF); //删除自己
OS_EXIT_CRITICAL(); //退出临界区(可以被中断打断)
}
二、uCOSii使用信号量实现中断和任务之间的同步
1、举例如下:
串口接收一组配置参数,然后将该参数需要保存到EEPROM中。显然,我们不能在中断中写EPPROM,这样会导致串口中断执行时间太长。因此需要分成两个部分实现,一个是串口接收,一个是负责保存参数,同时还要干其他事情。
有人会在某个任务中扫描串口,若收完配置信息立即保存,不用搞这个信号量也实现,实现方法千万种。这里使用信号量实现中断和任务之间的同步,完成中断和任务之间无缝隙对接。
2、实现方法:
1)、声明事件指针
OS_EVENT *Sem_Event;//定义一个事件指针
2)中断
uint8_t UART4HeadFlag;
uint8_t UART4_in; //UART4接收缓冲区的输入下标;
#define UART4_RCV_buffer_Size 100
//定义UART4接收缓冲区的长度100;
uint8_t UART4_RCV_buffer[UART4_RCV_buffer_Size];
//用来存放硬件串口接收到的数据;
//(ID=04661219C1677461)
//函数功能:USART4中断服务函数
void UART4_IRQHandler(void)
{
unsigned char temp;
(void)temp;//不让temp产生警告
if(USART_GetITStatus(UART4, USART_IT_RXNE) != RESET)
{
temp=USART_ReceiveData(UART4); //从UART4串口读取一个字节;
if(temp==’(’&& UART4HeadFlag==0)
{
UART4_in =0;
UART4HeadFlag=1;
}
if(UART4HeadFlag==1)
{
UART4_RCV_buffer[UART4_in]=temp;
UART4_in++;
}
if(temp==’)’&& UART4HeadFlag==1)
{
UART4_in =0;
UART4HeadFlag=0;//接收完成
OSSemPost(Sem_Event);//发出一个信号量
}
}
if(USART_GetFlagStatus(UART4,USART_FLAG_PE) != RESET)
{
USART_ReceiveData(UART4);//读串口
USART_ClearFlag(UART4, USART_FLAG_PE);
}
if(USART_GetFlagStatus(UART4,USART_FLAG_ORE) != RESET)
{
USART_ReceiveData(UART4);//读串口
USART_ClearFlag(UART4,USART_FLAG_ORE); //清除溢出中断
}
if(USART_GetFlagStatus(UART4,USART_FLAG_FE) != RESET)
{
USART_ReceiveData(UART4);//读串口
USART_ClearFlag(UART4,USART_FLAG_FE);
}
}
3)、任务1
void Task1(void *pdata)
{
u8 Sem_Err;
while(1)
{
OSSemPend(Sem_Event,0,&Sem_Err);//等待一个信号量,实现无缝对接
{
Save_String_To_EEPROM(UART4_RCV_buffer,UART4_in,ID_address);
}
}
}
void LED1_Task(void *pdata)
{
while(1)
{
LED1=!LED1;//信号有效
OSTimeDlyHMSM(0,0,0,500);//500毫秒闪烁1次
}
}
4)、启动任务
void Start_Task(void *pdata)
{
OS_CPU_SR cpu_sr=0;
OS_ENTER_CRITICAL();
//进入临界区(无法被中断打断),需要定义cpu_sr变量
Sem_Event=OSSemCreate(0);
//创建信号量Sem_Event,设置计数器初始值设置为0,即不发送一个信号量
OSTaskCreate(
Task1,/* 函数指针*/
(void *)0,/* 建立任务时,传递的参数*/
(OS_STK*)&Task1_STACK[Task1_STACK_SIZE-1],
/* 指向堆栈任务栈顶的指针*/
Task1_PRIORITY/* 任务优先级*/
);
OSTaskCreate(
LED1_Task,/* 函数指针*/
(void *)0,/* 建立任务时,传递的参数*/
(OS_STK*)&LED1_TASK_STACK[LED1_TASK_STACK_SIZE-1],
/* 指向堆栈任务栈顶的指针*/
LED1_TASK_PRIORITY/* 任务优先级*/
);
OSTaskDel(OS_PRIO_SELF); //删除自己
OS_EXIT_CRITICAL(); //退出临界区(可以被中断打断)
}
三、uCOSii使用信号量实现任务和任务之间的同步
1、举例如下:
任务1为负责按键触发
任务2负责点灯。
任务1中的按键KEY按下,任务2负责点灯ED1开灯关灯。
使用信号量实现任务与任务之间的同步,完成任务与任务之间无缝隙对接。
2、实现方法:
1)、声明事件指针
OS_EVENT *Sem_Event;//定义一个事件指针
2)、任务1
//函数功能:任务1负责按键触发。
void Key_Task(void *pdata)
{
u8 Sem_Err;
while(1)
{
if(KEY)OSSemPost(Sem_Event);//发出一个信号量
LED0=!LED0;
OSTimeDlyHMSM(0,0,0,500);//500毫秒闪烁1次
}
}
3)、任务2
void LED_Task(void *pdata)
{
u8 Sem_Err;
while(1)
{
OSSemPend(Sem_Event,0,&Sem_Err);//等待一个信号量,实现无缝对接
LED1=!LED1;//信号有效
}
}
4)、启动任务
void Start_Task(void *pdata)
{
OS_CPU_SR cpu_sr=0;
OS_ENTER_CRITICAL();
//进入临界区(无法被中断打断),需要定义cpu_sr变量
Sem_Event=OSSemCreate(0);
//创建信号量Sem_Event,设置计数器初始值设置为0,即不发送一个信号量
OSTaskCreate(
LED_Task,/* 函数指针*/
(void *)0,/* 建立任务时,传递的参数*/
(OS_STK*)&LED_Task_STACK[LED_Task_STACK_SIZE-1],
/* 指向堆栈任务栈顶的指针*/
LED_Task_PRIORITY/* 任务优先级*/
);
OSTaskCreate(
Key_Task,/* 函数指针*/
(void *)0,/* 建立任务时,传递的参数*/
(OS_STK*)&KEY_TASK_STACK[KEY_TASK_STACK_SIZE-1],
/* 指向堆栈任务栈顶的指针*/
KEY_TASK_PRIORITY/* 任务优先级*/
);
OSTaskDel(OS_PRIO_SELF); //删除自己
OS_EXIT_CRITICAL(); //退出临界区(可以被中断打断)
}

相关文章:
uCOSii信号量的作用
uCOSii中信号量的作用: 在创建信号量时,Sem_EventOSSemCreate(1)用于分时复用共享资源; Sem_EventOSSemCreate(0)用于中断和任务间同步或任务之间的同步。 具体在使用时,需要灵活运用。在访问共享资源时,我喜欢用互…...

Android 13 版本变更总览
Android 13 总览 https://developer.android.google.cn/about/versions/13?hlzh-cn 文章基于官方资料上提取 Android 13 功能和变更列表 https://developer.android.google.cn/about/versions/13/summary?hlzh-cn 行为变更:所有应用 https://developer.andr…...
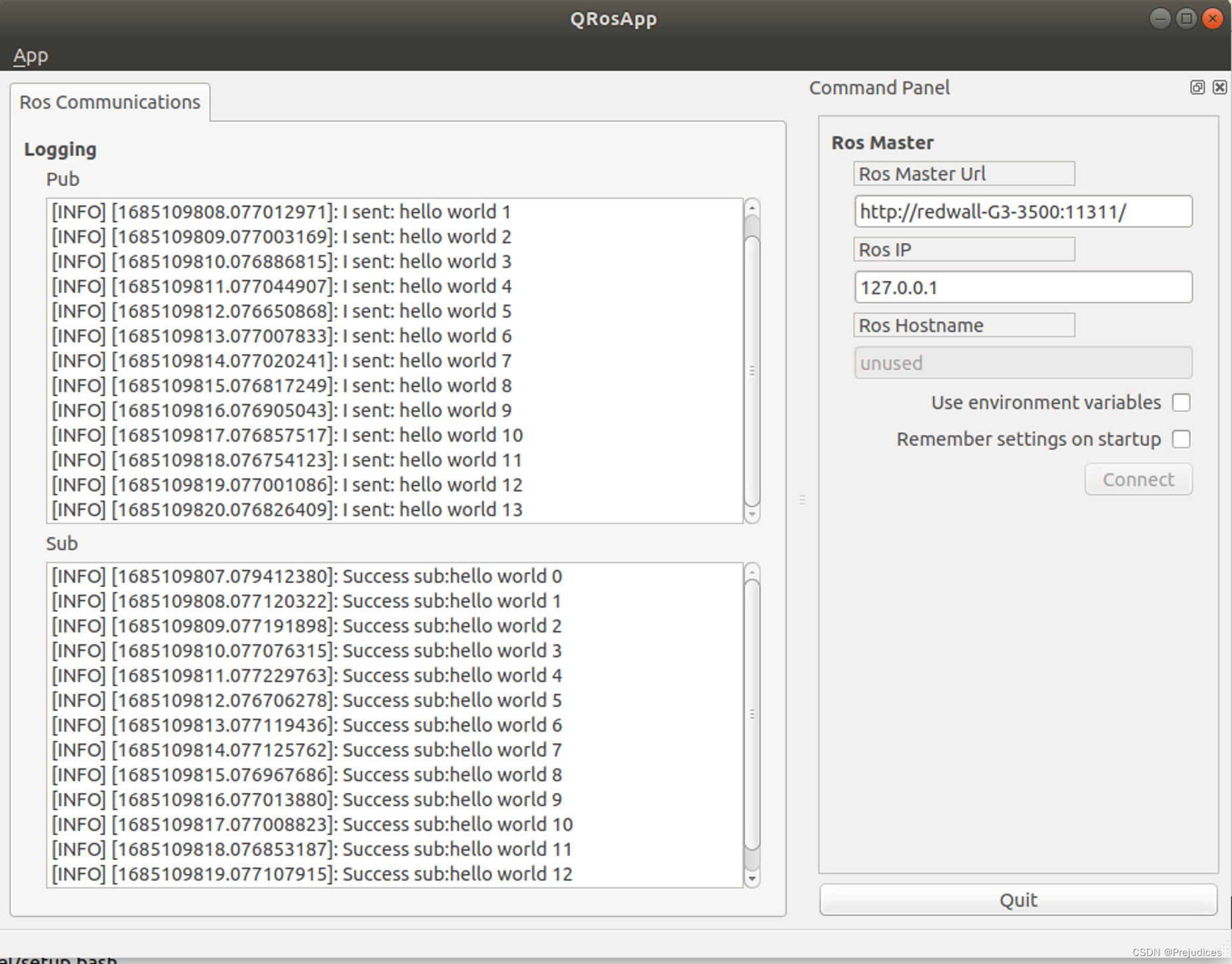
QT 设计ROS GUI界面订阅和发布话题
QT 设计ROS GUI界面订阅和发布话题 主要参考下面的博客 ROS项目开发实战(三)——使用QT进行ROS的GUI界面设计(详细教程附代码!!!) Qt ROS 相关配置请看上一篇博客 首先建立工作空间和功能包&a…...
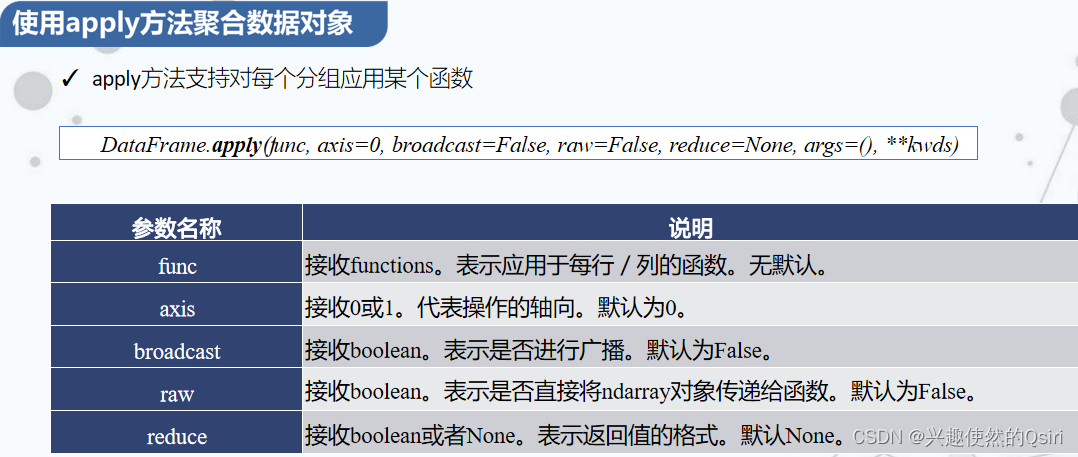
pandas数据预处理
pandas数据预处理 pandas及其数据结构pandas简介Series数据结构及其创建DataFrame数据结构及其创建 利用pandas导入导出数据导入外部数据导入数据文件 导出外部数据导出数据文件 数据概览及预处理数据概览分析利用DataFrame的常用属性利用DataFrame的常用方法 数据清洗缺失值处…...
Jupyter Notebook如何导入导出文件
目录 0.系统:windows 1.打开 Jupyter Notebook 2.Jupyter Notebook导入文件 3.Jupyter Notebook导出文件 0.系统:windows 1.打开 Jupyter Notebook 1)下载【Anaconda】后,直接点击【Jupyter Notebook】即可在网页打开 Jupyte…...
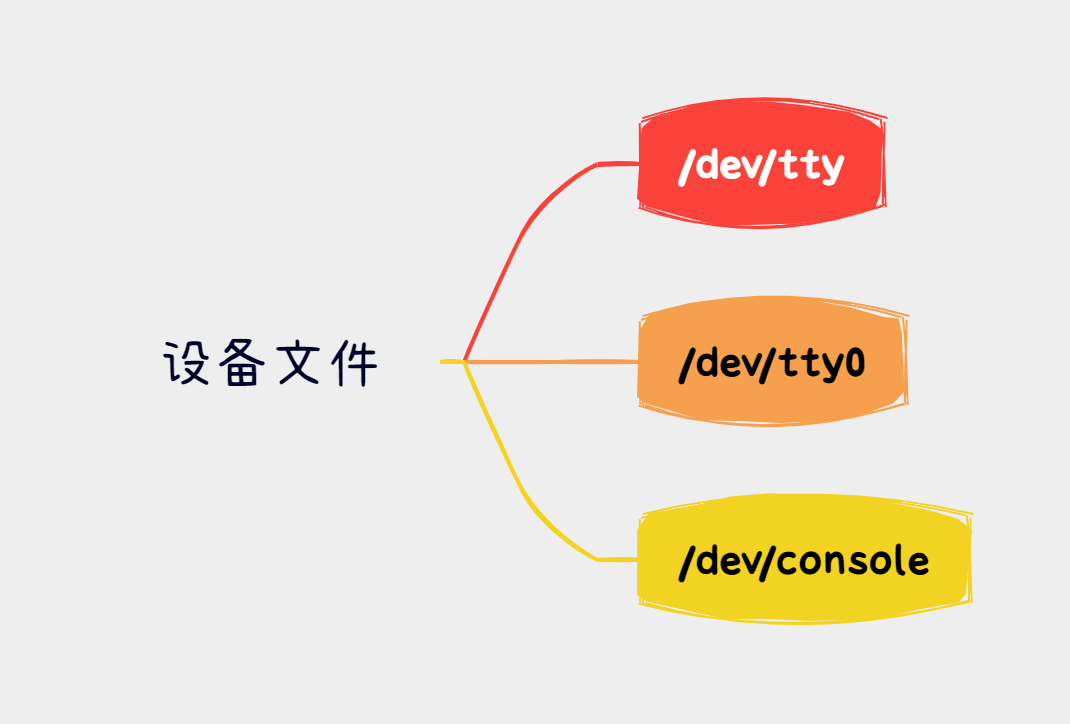
Linux:/dev/tty、/dev/tty0 和 /dev/console 之间的区别
在Linux操作系统中,/dev/tty、/dev/tty0和/dev/console是三个特殊的设备文件,它们在终端控制和输入/输出过程中扮演着重要的角色。尽管它们看起来很相似,但实际上它们之间存在一些重要的区别。本文将详细介绍这三个设备文件之间的区别以及它们…...
Linux 上安装 PostgreSQL——Ubuntu
打开 PostgreSQL 官网 PostgreSQL: The worlds most advanced open source database,点击菜单栏上的 Download ,可以看到这里包含了很多平台的安装包,包括 Linux、Windows、Mac OS等 。 Linux 我们可以看到支持 Ubuntu 和 Red Hat 等各个平台…...
合并两个有序链表(java)
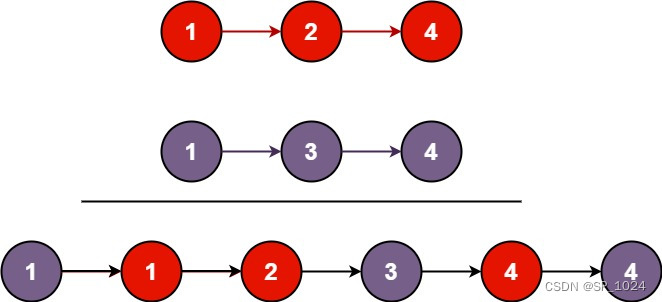
leetcode 21题:合并两个有序链表 题目描述解题思路:链表的其它题型。 题目描述 leetcode21题:合并两个有序链表 将两个升序链表合并为一个新的 升序 链表并返回。新链表是通过拼接给定的两个链表的所有节点组成的。 示例: 输入&…...
KEYSIGHT是德DSOX4034A 示波器 350 MHz
KEYSIGHT是德DSOX4034A 示波器 350 MHz,是德4000 X 系列拥有一系列引以为傲的配置,包括采用了电容触摸屏技术的 12.1 英寸显示屏、InfiniiScan 区域触摸触发、100 万波形/秒捕获率、MegaZoom IV 智能存储器技术和标配分段存储器。 是德DSO-X4034A 主要特…...

局域网技术
共享信道的分配技术是局域网的核心技术,而这一技术又与网络的拓扑结构和传输介质有关。 拓扑结构: 1.总线型拓扑: 总线一种多点广播介质,所有的站点通过接口硬件连接到总线上。 传输介质主要是同轴电缆(基带和宽带…...
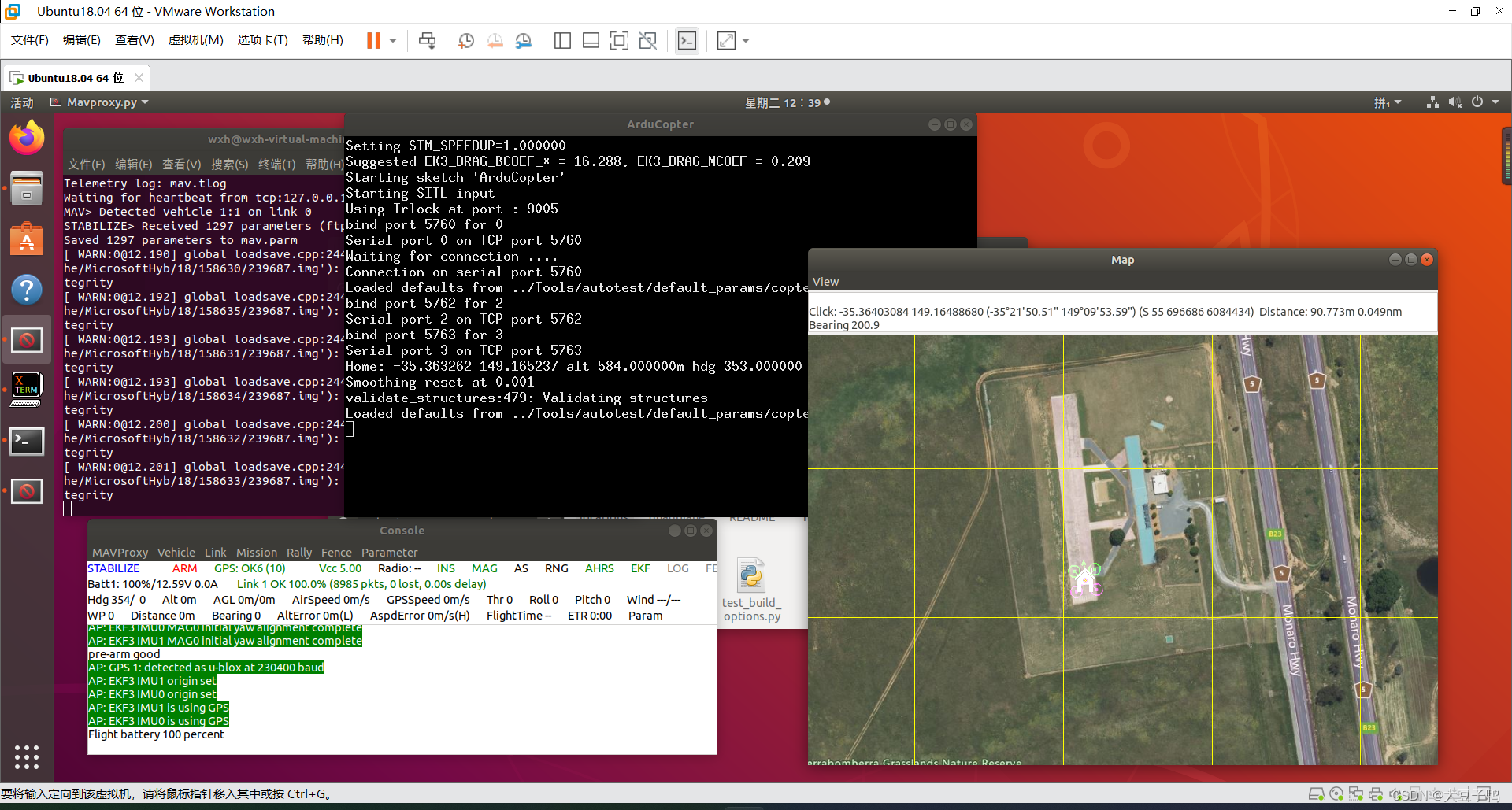
Pixhawk无人机-ArduPilot 软件SITL仿真模拟飞行(SITL+MAVProxy)
1 引言 本人是先看了多个博客实现了:在ubuntu下建立完整的ardupilot开发环境。 该文是基于搭建完编译环境后,也就是搭建好ardupilot的仿真环境实现的。 在文章: 《Pixhawk无人机扩展教程(5)—SITL仿真模拟飞行:开发环境搭建》.中指出&#…...

vue实现深拷贝的方法
在 vue中,深拷贝是一个很有用的功能,在不改变原来对象状态的情况下,进行对象的复制。 但要实现深拷贝,需要两个对象具有相同的属性。如果两个对象不同,深拷贝也不能实现。 1.我们将变量A的属性赋给变量B,但…...
LAMP架构
文章目录 LAMP架构一.简述各组件的主要作用如下: 二.过程展示1.编译安装Apache httpd服务(1)关闭防火墙,将安装Apache所需软件包传到/opt目录下(2)安装环境依赖包(3)配置软件模块(4)编译及安装(5)优化配置文件路径,并把httpd服务的可执行程序…...
javascript基础七:说说你对Javascript中作用域的理解?
一、作用域 作用域,即变量(变量作用域又称上下文)和函数生效(能被访问)的区域或集合 换句话说,作用域决定了代码区块中变量和其他资源的可见性 举个粟子 function myFunction(){let name小爱同学 } undef…...

chatgpt赋能python:Python变量赋值
Python 变量赋值 在 Python 中,我们可以使用多种符号来给变量赋值。本文将介绍这些符号以及它们在编程中的应用。 等号() 在 Python 中,我们最常用的符号是等号(),它可以将一个值赋给一个变量…...
SAP-QM-物料主数据-质量管理视图字段解析
过账到质检库存:要勾选,否则收货后库存不进入质检库存HU检验:收货到启用HU管理的库位时产生检验批,例如某个成品物料是收货到C002库位,该库位启用了HU管理,那么此处要勾选。但是如果勾选了,却收…...
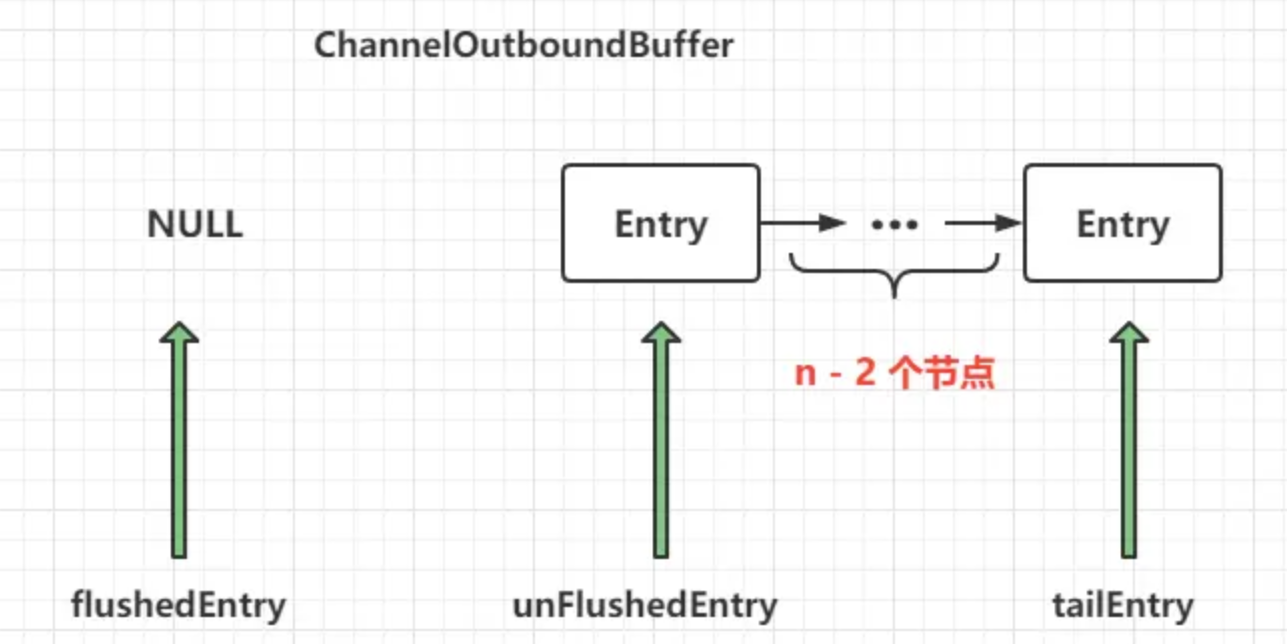
【Netty】一行简单的writeAndFlush都做了哪些事(十八)
文章目录 前言一、源码分析1.1 ctx.writeAndFlush 的逻辑1.2 writeAndFlush 源码1.3 ChannelOutBoundBuff 类1.4 addMessage 方法1.5 addFlush 方法1.6 AbstractNioByteChannel 类 总结 前言 回顾Netty系列文章: Netty 概述(一)Netty 架构设…...

STM32U575 DMA配置
起个摘要,后期维护 1、DMA原理:参考:【STM32】DMA原理,配置步骤超详细,一文搞懂DMA_dma配置_~Old的博客-CSDN博客 2、STM32U575的DMA资源: (datasheet摘要) 3、UART的使用 4、I2…...

14-Vue3快速上手
目录 1.Vue3简介2. Vue3带来了什么2.1 性能的提升2.2 源码的升级2.3 拥抱TypeScript2.4 新的特性 1、海贼王,我当定了!——路飞 2、人,最重要的是“心”啊!——山治 3、如果放弃,我将终身遗憾。——路飞 4、人的梦想是…...

Docker registry 搭建
1、安装 docker 环境 参考:https://mp.csdn.net/mp_blog/creation/editor/104673841 2、准备 registry 镜像 机器有外网访问权限,直接 docker pull registry 通过 docker images 查看本地镜像 3、启动 registry docker run -d -p 5000:5000 --rest…...

AI Agent测试不再黑盒:从Prompt覆盖率到行为一致性,5步构建可审计、可复现、可量化的工业级测试体系
更多请点击: https://kaifayun.com 第一章:AI Agent测试不再黑盒:从Prompt覆盖率到行为一致性,5步构建可审计、可复现、可量化的工业级测试体系 传统AI Agent测试常陷于“输入-输出”表层验证,缺乏对内部推理链、工具…...

MoE混合专家架构:揭秘大模型参数激活率与真实算力开销
1. 这不是“参数越多越强”的简单故事:拆解大模型里那个被悄悄藏起来的“开关”你肯定见过这类标题:“GPT-4 参数高达1.8万亿!”、“DeepSeek-R1 拥有6710亿参数!”——光是数字本身就像一记重锤,砸得人头晕目眩。但真…...
Unity UGUI血条蓝条从零实现:Canvas层级、RectTransform锚点与FillAmount原理
1. 这不是“拖拽控件就完事”的UI课,而是让你真正理解UGUI底层逻辑的起点 很多人学Unity UI,上来就是打开Canvas、拖个Button、改个颜色、加个OnClick事件——看起来5分钟就能做出个界面,结果一到要做血条、要动态更新、要适配不同分辨率、要…...
)
2026年亲测AI论文写作软件指南(高效定稿版)
为解决学术写作中效率与合规两大核心痛点,本文精选8款高适配性 AI 论文写作工具(按综合优先级排序),围绕中文学术规范适配、真实参考文献生成、格式标准化、高性价比四大核心维度进行测评,同时配套分场景精准选型方案与…...

OpenSpeedy:开源游戏加速神器,彻底告别卡顿体验
OpenSpeedy:开源游戏加速神器,彻底告别卡顿体验 【免费下载链接】OpenSpeedy 🎮 An open-source game speed modifier. 项目地址: https://gitcode.com/gh_mirrors/op/OpenSpeedy 还在为游戏中的卡顿、掉帧和加载缓慢而烦恼吗…...

Unity热更新原理与方案选型:从AOT限制到HybridCLR实践
1. 热更新不是“打补丁”,而是游戏生命周期的呼吸系统很多人第一次听说Unity热更新,脑子里浮现的是“改个UI文字不用重发包”“修个崩溃不用上架审核”——这没错,但太浅了。我带过三支手游团队,从2017年用AssetBundle硬啃&#x…...

EGO-Planner-v2:零配置开启无人机集群仿真新体验
EGO-Planner-v2:零配置开启无人机集群仿真新体验 【免费下载链接】EGO-Planner-v2 Swarm Playground, the codebase of the paper "Swarm of micro flying robots in the wild" 项目地址: https://gitcode.com/gh_mirrors/eg/EGO-Planner-v2 想要快…...

构建中文AI的未来:MNBVC超大规模语料库的深度解析与实践指南
构建中文AI的未来:MNBVC超大规模语料库的深度解析与实践指南 【免费下载链接】MNBVC MNBVC(Massive Never-ending BT Vast Chinese corpus)超大规模中文语料集。对标chatGPT训练的40T数据。MNBVC数据集不但包括主流文化,也包括各个小众文化甚至火星文的数…...

可视化跨平台Node.js管理:如何告别命令行依赖,实现高效多版本切换
可视化跨平台Node.js管理:如何告别命令行依赖,实现高效多版本切换 【免费下载链接】nvm-desktop Node Version Manager Desktop - A desktop application to manage multiple active node.js versions. 项目地址: https://gitcode.com/gh_mirrors/nv/n…...
)
告别Bowtie2!用Minimap2搞定FASTQ到BAM的保姆级流程(含最新参数详解)
告别Bowtie2!用Minimap2搞定FASTQ到BAM的保姆级流程(含最新参数详解) 在生物信息学领域,测序数据的比对分析一直是核心工作流程之一。随着测序技术的快速发展,传统的比对工具如Bowtie2在处理长读长测序数据时逐渐显现出…...