最优化简明版(上)
引言
本文简单地介绍一些凸优化(Convex Optimization)的基础知识,可能不会有很多证明推导,目的是能快速应用到机器学习问题上。
凸集
直线与线段
设 x 1 ≠ x 2 x_1 \neq x_2 x1=x2为 R n \Bbb R^n Rn空间中的两个点,那么具有下列形式的点
y = θ x 1 + ( 1 − θ ) x 2 , θ ∈ R y= \theta x_1 + (1-\theta)x_2,\, \theta \in \Bbb R y=θx1+(1−θ)x2,θ∈R
组成一条穿越 x 1 x_1 x1和 x 2 x_2 x2的直线。
如果参数 θ \theta θ的值在 0 0 0到 1 1 1之间变动,就构成了 x 1 x_1 x1和 x 2 x_2 x2之间的线段。
仿射集合
如果通过集合 C ⊆ R n C \subseteq \Bbb R^n C⊆Rn中任意两个不同点的直线仍然在集合 C C C中,那么称集合 C C C是仿射的。
可以扩展到多个点的情况,如果 θ 1 + ⋯ + θ k = 1 \theta_1+ \cdots + \theta_k=1 θ1+⋯+θk=1,我们称具有 θ 1 x 1 + ⋯ + θ k x k \theta_1 x_1 + \cdots + \theta_k x_k θ1x1+⋯+θkxk形式的点为 x 1 , ⋯ , x k x_1,\cdots, x_k x1,⋯,xk的仿射组合。
凸集
首先来了解下什么是凸集(Convex Set)。
集合 C C C被称为凸集,如果 C C C中任意两点间的线段仍然在 C C C中,即对于任意 x 1 , x 2 ∈ C x_1,x_2 \in C x1,x2∈C和满足 0 ≤ θ ≤ 1 0\leq \theta \leq 1 0≤θ≤1的 θ \theta θ都有
θ x 1 + ( 1 − θ ) x 2 ∈ C (1) \theta x_1 + (1-\theta)x_2 \in C \tag{1} θx1+(1−θ)x2∈C(1)
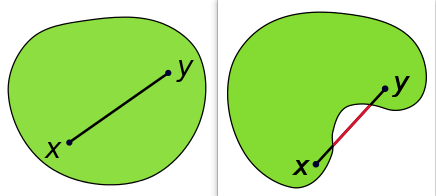
直观上来看,凸集的形状是饱满的,即没有凹进去的地方。
我们称
θ x 1 + ( 1 − θ ) x 2 (2) \theta x_1 + (1-\theta)x_2 \tag{2} θx1+(1−θ)x2(2)
为点 x 1 , x 2 x_1,x_2 x1,x2的凸组合,类似地,可以推广到多个点:
θ 1 x 1 + ⋯ + θ k x k (3) \theta_1 x_1 + \cdots + \theta_kx_k \tag{3} θ1x1+⋯+θkxk(3)
为点 x 1 , ⋯ , x k x_1,\cdots,x_k x1,⋯,xk的一个凸组合,其中 θ 1 + ⋯ + θ k = 1 \theta_1 + \cdots + \theta_k=1 θ1+⋯+θk=1且 θ i ≥ 0 , i = 1 , ⋯ , k \theta_i \geq 0, \, i=1,\cdots,k θi≥0,i=1,⋯,k。
一个集合是凸集也可以说集合包含其中所有点的凸组合。
我们称集合 C C C中所有点的凸组合的集合为其凸包,记作 conv C \text{conv} \,C convC。
多个凸集的交集也是凸集,这意味着如果每个不等式或等式约束条件定义的集合都是凸集,那么这些条件联合起来定义的集合仍然是凸集。
基于凸集的概念可以定义凸函数。
凸函数
函数 f : R n → R f : \Bbb R^n \rightarrow \Bbb R f:Rn→R是凸的,如果函数的定义域( dom f \text{dom}\, f domf)是凸集,且对于任意 x 1 , x 2 ∈ dom f x_1,x_2 \in \text{dom}\, f x1,x2∈domf和任意的 0 ≤ θ ≤ 1 0 \leq \theta \leq 1 0≤θ≤1,有
f ( θ x 1 + ( 1 − θ ) x 2 ) ≤ θ f ( x 1 ) + ( 1 − θ ) f ( x 2 ) (4) f(\theta x_1 + (1-\theta)x_2) \leq \theta f(x_1) + (1-\theta) f(x_2) \tag{4} f(θx1+(1−θ)x2)≤θf(x1)+(1−θ)f(x2)(4)
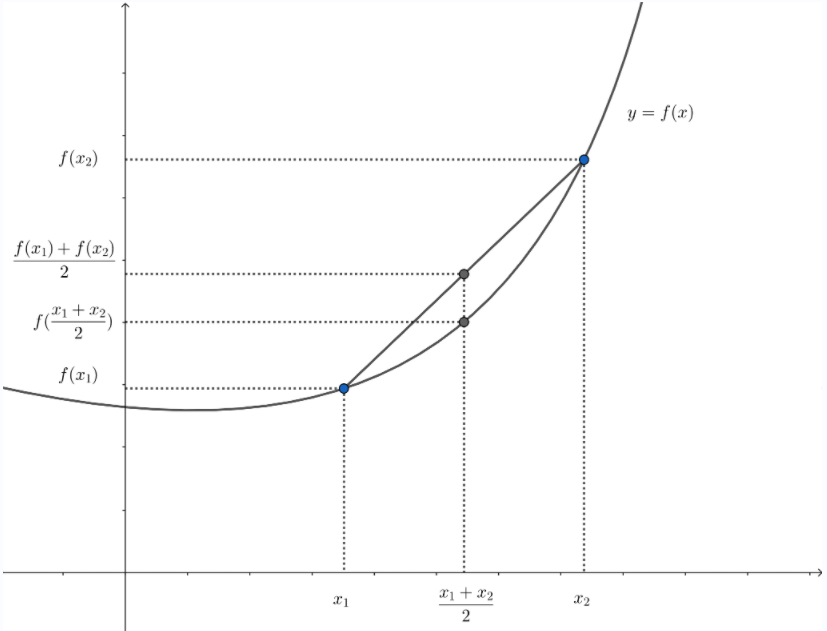
如图2(取 θ = 1 2 \theta=\frac{1}{2} θ=21),从几何意义上看,式 ( 4 ) (4) (4)的不等式成立意味着点 ( x 1 , f ( x 1 ) ) (x_1,f(x_1)) (x1,f(x1))和 ( x 2 , f ( x 2 ) ) (x_2,f(x_2)) (x2,f(x2))之间的线段,即从 x 1 x_1 x1到 x 2 x_2 x2的弦,在函数 f f f的图像上方。
反之,如果式 ( 4 ) (4) (4)中的函数为 ≥ \geq ≥,则称为凹函数。如果 f f f是凸函数,那么 − f -f −f就是凹函数。注意,还有很多函数是非凸也非凹的。
凸函数的一个很好的性质是,它只有一个局部极小值点,同时也是全局最小值点。
凸优化问题
优化问题
我们用
minimize f 0 ( x ) s.t. f i ( x ) ≤ 0 , i = 1 , … , m h i ( x ) = 0 , i = 1 , … , p (5) \begin{aligned} &\text{minimize}\quad &&f_0(x)\\ &\text{s.t.}\quad &&f_i(x) \leq 0,\quad i=1,\dots,m\\ &&&h_i(x) = 0,\quad i=1,\dots,p \end{aligned} \tag{5} minimizes.t.f0(x)fi(x)≤0,i=1,…,mhi(x)=0,i=1,…,p(5)
描述在所有满足 f i ( x ) ≤ 0 , i = 1 , ⋯ , m f_i(x) \leq 0,\, i=1,\cdots,m fi(x)≤0,i=1,⋯,m及 h i ( x ) = 0 , i = 1 , ⋯ , p h_i(x)=0,\,i=1,\cdots,p hi(x)=0,i=1,⋯,p的 x x x中寻找极小化 f 0 ( x ) f_0(x) f0(x)的 x x x的问题,即优化问题。
-
x ∈ R n x \in \Bbb R^n x∈Rn为优化变量;
-
函数 f 0 : R n → R f_0 : \Bbb R^n \rightarrow \Bbb R f0:Rn→R为目标函数;
-
不等式 f i ( x ) ≤ 0 f_i(x) \leq 0 fi(x)≤0称为不等式约束,相应的函数 f i : R n → R f_i: \Bbb R^n \rightarrow \Bbb R fi:Rn→R称为不等式约束函数;
-
方程组 h i ( x ) = 0 h_i(x) =0 hi(x)=0称为等式约束,相应的函数 h i : R n → R h_i: \Bbb R^n \rightarrow \Bbb R hi:Rn→R称为等式约束函数。
如果没有约束,即 m = p = 0 m=p=0 m=p=0,我们称问题 ( 5 ) (5) (5)为无约束问题。
对目标和所有约束函数有定义的点的集合
D = ⋂ i = 0 m dom f i ∩ ⋂ i = 1 p dom h i \mathcal D = \bigcap_{i=0}^m \text{dom}\, f_i \cap \bigcap_{i=1}^p \text{dom}\, h_i D=i=0⋂mdomfi∩i=1⋂pdomhi
称为优化问题 ( 5 ) (5) (5)的定义域。当点 x ∈ D x \in \cal D x∈D满足约束 f i ( x ) ≤ 0 , i = 1 , ⋯ , m f_i(x) \leq 0,\, i=1,\cdots,m fi(x)≤0,i=1,⋯,m和 h i ( x ) = 0 , i = 1 , ⋯ , p h_i(x)=0,\, i=1,\cdots, p hi(x)=0,i=1,⋯,p时, x x x是可行的。当问题 ( 5 ) (5) (5)至少有一个可行点时,我们称为可行的,否则称为不可行。所有可行点的集合称为可行集或约束集。
如果 x ∗ x^* x∗是可行的并且 f 0 ( x ∗ ) = p ∗ f_0(x^*)=p^* f0(x∗)=p∗最优值,我们称 x ∗ x^* x∗为最优点。如果问题存在最优解,我们称最优质是课的或可达的,称问题可解。
如果 x x x可行且 f i ( x ) = 0 f_i(x)=0 fi(x)=0,我们称约束 f i ( x ) ≤ 0 f_i(x)\leq 0 fi(x)≤0的第 i i i个不等式在 x x x处起作用。如果 f i ( x ) < 0 f_i(x) < 0 fi(x)<0,则约束 f i ( x ) ≤ 0 f_i(x) \leq 0 fi(x)≤0不起作用。我们称约束是冗余的,如果去掉它不改变可行集。
凸优化
凸优化问题是形如
minimize f 0 ( x ) s.t. f i ( x ) ≤ 0 , i = 1 , … , m a i T x = b i , i = 1 , ⋯ , p (6) \begin{aligned} &\text{minimize}\quad &&f_0(x)\\ &\text{s.t.}\quad &&f_i(x) \leq 0,\quad i=1,\dots,m\\ &&&a_i^Tx = b_i,\quad\, i=1,\cdots,p \end{aligned} \tag{6} minimizes.t.f0(x)fi(x)≤0,i=1,…,maiTx=bi,i=1,⋯,p(6)
的问题,其中 f 0 , ⋯ , f m f_0,\cdots,f_m f0,⋯,fm为凸函数,对比优化问题 ( 5 ) (5) (5),凸优化问题有三个附加的要求:
- 目标函数必须是凸的;
- 不等式约束函数必须是凸的;
- 等式约束函数 h i ( x ) = a i T − b i h_i(x) = a^T_i - b_i hi(x)=aiT−bi必须是仿射的;
立即可以看到一个重要的性质:凸优化问题的可行集是凸的。
带约束的优化问题
拉格朗日乘子法
拉格朗日乘子法(Lagrange Multiplier Method)用于求解带等式约束条件的函数极值(优化问题)。假设有如下极值问题
minimize f ( x ) s.t. h i ( x ) = 0 , i = 1 , … , p (7) \begin{aligned} &\text{minimize}\quad &&f(x)\\ &\text{s.t.}\quad &&h_i(x) = 0,\quad i=1,\dots,p\\ \end{aligned} \tag{7} minimizes.t.f(x)hi(x)=0,i=1,…,p(7)
拉格朗日乘子法构造如下拉格朗日乘子函数
L ( x , λ ) = f ( x ) + ∑ i = 1 p λ i h i ( x ) (8) L(x,\lambda) = f(x) + \sum_{i=1}^p \lambda_i h_i(x) \tag{8} L(x,λ)=f(x)+i=1∑pλihi(x)(8)
其中 λ \lambda λ为新引入的自变量,称为拉格朗日乘子((Lagrange Multiplier)。构造了该函数之后,去掉了对优化变量的等式约束。对拉格朗日乘子函数的所有自变量求偏导,并令其为 0 0 0。包括对 x x x求导、对 λ \lambda λ求导。得到下面的方程组:
∇ x f ( x ) + ∑ i = 1 p λ i ∇ x h i ( x ) = 0 h i ( x ) = 0 (9) \begin{aligned} \nabla_x f(x) + \sum_{i=1}^p \lambda_i \nabla_x h_i(x) &= 0 \\ h_i(x) &= 0 \end{aligned} \tag{9} ∇xf(x)+i=1∑pλi∇xhi(x)hi(x)=0=0(9)
求解该方程组即可得到函数的候选极值点。
拉格朗日对偶
对偶是求解最优化问题的一种手段,它将一个最优化问题转换为另一个更容易求解的问题,这两个问题是等价的。
对于如下带等式约束和不等式约束的优化问题:
minimize f ( x ) s.t. g i ( x ) ≤ 0 , i = 1 , … , m h i ( x ) = 0 , i = 1 , … , p (10) \begin{aligned} &\text{minimize}\quad &&f(x)\\ &\text{s.t.}\quad &&g_i(x) \leq 0,\quad i=1,\dots,m\\ &&&h_i(x) = 0,\quad i=1,\dots,p \end{aligned} \tag{10} minimizes.t.f(x)gi(x)≤0,i=1,…,mhi(x)=0,i=1,…,p(10)
仿照拉格朗日乘子法构造广义拉格朗日乘子函数
L ( x , λ , μ ) = f ( x ) + ∑ i = 1 m λ i g i ( x ) + ∑ i = 1 p μ i h i ( x ) (11) L(x,\lambda,\mu ) = f(x) + \sum_{i=1}^m \lambda_i g_i(x) + \sum_{i=1}^p \mu_i h_i(x) \tag{11} L(x,λ,μ)=f(x)+i=1∑mλigi(x)+i=1∑pμihi(x)(11)
称 λ \lambda λ和 μ \mu μ为拉格朗日乘子,特别要求 λ i ≥ 0 \lambda_i \geq 0 λi≥0。接下来将上面的问题转化为所谓的原问题,其最优化解为 p ∗ p^* p∗。
p ∗ = min x max λ , μ , λ i ≥ 0 L ( x , λ , μ ) = min x θ P ( x ) (12) p^* = \min_x \, \max_{\lambda,\mu,\lambda_i \geq 0} L(x,\lambda, \mu) = \min_x \theta_P(x) \tag{12} p∗=xminλ,μ,λi≥0maxL(x,λ,μ)=xminθP(x)(12)
上式第一个等号右边的含义是先固定变量 x x x,将其看成常数,让拉格朗日函数对乘子变量 λ \lambda λ和 μ \mu μ求极大值;消掉(确定了)变量 λ \lambda λ和 μ \mu μ之后,再对变量 x x x求极小值。
为了简化表述,定义如下极大值问题
θ P ( x ) = max λ , μ , λ i ≥ 0 L ( x , λ , μ ) (13) \theta_P(x) =\max_{\lambda,\mu,\lambda_i \geq 0} L(x,\lambda, \mu) \tag{13} θP(x)=λ,μ,λi≥0maxL(x,λ,μ)(13)
这是一个对变量 λ \lambda λ和 μ \mu μ求函数 L L L的极大值的问题,将 x x x看成常数。这样,原始问题被转化为先对变量 λ \lambda λ和 μ \mu μ求极大值,再对 x x x求极小值。
这个原问题和我们要求解的原始问题有同样的解,下面给出证明。对于任意的 x x x,分两种情况讨论。
(1)如果 x x x是不可行解,对于某些 i i i有 g i ( x ) > 0 g_i(x) > 0 gi(x)>0,即 x x x违反了不等式约束条件,我们让拉格朗日乘子 λ i = + ∞ \lambda_i = +\infty λi=+∞,最终使得目标函数 θ P ( x ) = + ∞ \theta_P(x) = +\infty θP(x)=+∞。如果对于某些 i i i有 h i ( x ) ≠ 0 h_i(x) \neq 0 hi(x)=0,即违反了等式约束,我们可以让 μ i = + ∞ ⋅ sgn ( h i ( x ) ) \mu_i = +\infty \cdot \text{sgn}(h_i(x)) μi=+∞⋅sgn(hi(x)),从而使得 θ P ( x ) = + ∞ \theta_P(x) = +\infty θP(x)=+∞。
即对于任意不满足等式或不等式约束条件的 x x x, θ P ( x ) \theta_P(x) θP(x)的值是 + ∞ +\infty +∞。
(2)如果 x x x是可行解,这时 θ P ( x ) = f ( x ) \theta_P(x) = f(x) θP(x)=f(x)。因为有 h i ( x ) = 0 h_i(x) =0 hi(x)=0且 g i ( x ) ≤ 0 g_i(x) \leq 0 gi(x)≤0,而我们要求 λ i ≥ 0 \lambda_i \geq 0 λi≥0,因为 θ P ( x ) \theta_P(x) θP(x)的极大值就是 f ( x ) f(x) f(x)。为了达到这个极大值,我们让 λ i \lambda_i λi和 μ i \mu_i μi为 0 0 0,函数 f ( x ) + ∑ i = 1 p μ i h i ( x ) f(x) + \sum_{i=1}^p \mu_i h_i(x) f(x)+∑i=1pμihi(x)的极大值就是 f ( x ) f(x) f(x)。
综上两种情况,问题 θ P ( x ) \theta_P(x) θP(x)和我们要优化的原始问题的关系可以表述为
θ P ( x ) = { f ( x ) g i ( x ) ≤ 0 , h i ( x ) = 0 + ∞ else \theta_P(x) = \begin{cases} f(x) & g_i(x) \leq 0, h_i(x) = 0\\ +\infty & \text{else} \end{cases} θP(x)={f(x)+∞gi(x)≤0,hi(x)=0else
即 θ P ( x ) \theta_P(x) θP(x)是原始优化问题的无约束版本。对于任何不可行的 x x x,有 θ P ( x ) = + ∞ \theta_P(x) = +\infty θP(x)=+∞,从而使得原始问题的目标函数趋向于无穷大,排除掉 x x x的不可行区域,只剩下可行的 x x x组成的区域。
这样我们要求解的带约束优化问题被转化成了对 x x x不带约束的优化问题,并且二者等价。
下面定义对偶问题与其最优解 d ∗ d^* d∗。
d ∗ = max λ , μ , λ i ≥ 0 min x L ( x , λ , μ ) = max λ , μ , λ i ≥ 0 θ D ( λ , μ ) (14) d^* = \max_{\lambda,\mu,\lambda_i \geq 0}\, \min_x L(x,\lambda, \mu) = \max_{\lambda,\mu,\lambda_i \geq 0} \theta_D(\lambda, \mu) \tag{14} d∗=λ,μ,λi≥0maxxminL(x,λ,μ)=λ,μ,λi≥0maxθD(λ,μ)(14)
这里先固定拉格朗日乘子 λ \lambda λ和 μ \mu μ,调整 x x x让拉格朗日函数对 x x x求极小值;然后调整 λ \lambda λ和 μ \mu μ对函数求极大值。
原问题和对偶问题只是改变了求极大值和极小值的顺序,每次操控的变量是一样的。如果原问题和对偶问题都存在最优解,则对偶问题的最优值不大于原问题的最优值,即
d ∗ = max λ , μ , λ i ≥ 0 min x L ( x , λ , μ ) ≤ min x max λ , μ , λ i ≥ 0 L ( x , λ , μ ) = p ∗ (15) d^* =\max_{\lambda,\mu,\lambda_i \geq 0}\, \min_x L(x,\lambda, \mu) \leq \min_x \, \max_{\lambda,\mu,\lambda_i \geq 0} L(x,\lambda, \mu) = p^* \tag{15} d∗=λ,μ,λi≥0maxxminL(x,λ,μ)≤xminλ,μ,λi≥0maxL(x,λ,μ)=p∗(15)
证明,假设原问题的最优解为 x 1 , λ 1 , μ 1 x_1,\lambda_1,\mu_1 x1,λ1,μ1,对偶问题的最优解为 x 2 , λ 2 , μ 2 x_2,\lambda_2,\mu_2 x2,λ2,μ2,由于原问题是先对 ( λ , μ ) (\lambda,\mu) (λ,μ)取极大值,有
L ( x 1 , λ 1 , μ 1 ) ≥ L ( x 1 , λ 2 , μ 2 ) L(x_1,\lambda_1,\mu_1) \geq L(x_1,\lambda_2,\mu_2) L(x1,λ1,μ1)≥L(x1,λ2,μ2)
这里固定 x 1 x_1 x1。
而对偶问题先对 x x x取极小值,有
L ( x 2 , λ 2 , μ 2 ) ≤ L ( x 1 , λ 2 , μ 2 ) L(x_2,\lambda_2,\mu_2) \leq L(x_1,\lambda_2,\mu_2) L(x2,λ2,μ2)≤L(x1,λ2,μ2)
这类变化的只是 x x x。上面两个式子中右边都是一样的,从而有
L ( x 1 , λ 1 , μ 1 ) ≥ L ( x 2 , λ 2 , μ 2 ) L(x_1,\lambda_1,\mu_1) \geq L(x_2,\lambda_2,\mu_2) L(x1,λ1,μ1)≥L(x2,λ2,μ2)
这一结论称为弱对偶定理(Weak Duality)。
原问题最优值和对偶问题最优值的差 p ∗ − d ∗ p^*-d^* p∗−d∗称为对偶间隙。如果原问题和对偶问题有相同的最优解,那么我们就可以把求解原问题转化为求解对偶问题,此时对偶间隙为0,这种情况称为强对偶。
但要满足怎样的条件才能使得 d ∗ = p ∗ d^*=p^* d∗=p∗呢,就是下面阐述的KKT条件。
KKT条件
KKT(Karush-Kuhn-Tucker)条件用于求解带有等式和不等式约束的优化问题,是拉格朗日乘子法的推广。
对于如下带等式约束和不等式约束的优化问题:
minimize f ( x ) s.t. g i ( x ) ≤ 0 , i = 1 , … , m h i ( x ) = 0 , i = 1 , … , n (16) \begin{aligned} &\text{minimize}\quad &&f(x)\\ &\text{s.t.}\quad &&g_i(x) \leq 0,\quad i=1,\dots,m\\ &&&h_i(x) = 0,\quad i=1,\dots,n \end{aligned} \tag{16} minimizes.t.f(x)gi(x)≤0,i=1,…,mhi(x)=0,i=1,…,n(16)
与拉格朗日对偶的做法类似,为其构造拉格朗日乘子函数消掉等式和不等式约束:
L ( x , λ , μ ) = f ( x ) + ∑ i = 1 m μ i g i ( x ) + ∑ i = 1 n λ i h i ( x ) (17) L(x,\lambda,\mu ) = f(x) + \sum_{i=1}^m \mu_i g_i(x) + \sum_{i=1}^n \lambda_i h_i(x) \tag{17} L(x,λ,μ)=f(x)+i=1∑mμigi(x)+i=1∑nλihi(x)(17)
λ \lambda λ和 μ \mu μ称为KKT乘子。
KKT条件包括:
- ∇ x L ( x , λ , μ ) = 0 \nabla_x L(x,\lambda,\mu) = \pmb 0 ∇xL(x,λ,μ)=0
- g i ( x ) ≤ 0 g_i (x) \leq 0 gi(x)≤0
- h i ( x ) = 0 h_i(x) =0 hi(x)=0
- μ i ≥ 0 \mu_i \geq 0 μi≥0
- μ i g i ( x ) = 0 \mu_ig_i(x) =0 μigi(x)=0
其中第三个条件 h i ( x ) = 0 h_i(x) =0 hi(x)=0等式约束和第二个条件 g i ( x ) ≤ 0 g_i (x) \leq 0 gi(x)≤0不等式约束是本身应该满足的约束;第一个条件 ∇ x L ( x , λ , μ ) = 0 \nabla_x L(x,\lambda,\mu) = \pmb 0 ∇xL(x,λ,μ)=0和拉格朗日乘子法相同。
第四个条件称为对偶可行性条件;
第五个条件称为互补松弛条件,而且当一个变量取非零值时,另一个变量必须取零。
KKT条件是取得极值的必要条件,但如果一个优化问题是凸优化问题,则KKT条件是取得极小值的充分条件。
Slater条件
Slater条件:一个凸优化问题如果存在一个候选 x x x使得所有不等式约束都是严格满足的,即对于所有的 i i i都有 g i ( x ) < 0 g_i(x) < 0 gi(x)<0,也就是说,在不等式约束区域内部至少有一个可行点,则存在 ( x ∗ , λ ∗ , μ ∗ ) (x^*,\lambda^*,\mu^*) (x∗,λ∗,μ∗)使得它们同时为原问题和对偶问题的最优解,即
p ∗ = d ∗ = L ( x ∗ , λ ∗ , μ ∗ ) p^*=d^*= L(x^*,\lambda^*,\mu^*) p∗=d∗=L(x∗,λ∗,μ∗)
Slater条件是强对偶成立的充分条件而不是必要条件。
小结
Slater条件和KKT条件都是用来判断最优化问题是否有解的条件。它们之间的关系可以总结如下:
- Slater条件是一种充分条件,当最优化问题满足Slater条件时,会保证强对偶性成立,并且原始问题和对偶问题都存在最优解。具体来说,Slater条件要求不等式约束条件 g i ( x ) ≤ 0 g_i(x) \leq 0 gi(x)≤0 和等式约束条件 h i ( x ) = 0 h_i(x)=0 hi(x)=0 满足严格可行性,即存在一个 x x x使得所有的不等式约束条件 g i ( x ) < 0 g_i(x) < 0 gi(x)<0 均严格成立。
- KKT条件是一组必要条件,可以用于判断某个点是否为最优解。对于有约束的最优化问题,其KKT条件包括互补松弛条件、不等式约束条件的拉格朗日乘子大于等于零以及梯度为零。若最优化问题的解满足KKT条件,则该解是最优解的必要条件。
需要注意的是,Slater条件只是强对偶性的一种充分条件,而不是必要条件。也就是说,如果一个问题不满足Slater条件,仍然有可能存在最优解以及强对偶性。而KKT条件则是最优解的必要条件,但不一定是充分条件,也就是说,一个满足KKT条件的点并不一定是最优解。
因此,在实际求解问题时,我们通常需要结合Slater条件和KKT条件来进行判断,以保证得到的解是可行的、正确的,并且满足约束条件。
最优化方法
梯度下降法
梯度下降法(gradient descent)或最速下降法是求解无约束最优化问题的一种最常用的方法,它的优点是实现简单。梯度下降法是一种迭代算法,每一步需要求解目标函数的梯度向量。
假设 f ( x ) f(x) f(x)是 R n \Bbb R^n Rn是具有一阶连续偏导数的函数。要求解的无约束最优化问题是
min x ∈ R n f ( x ) (18) \min_{x \in \Bbb R^n} f(x) \tag{18} x∈Rnminf(x)(18)
x ∗ x^* x∗表示目标函数 f ( x ) f(x) f(x)的极小值点。
梯度下降法通过选择适当的初值 x ( 0 ) x^{(0)} x(0),不断迭代,更新 x x x的值,进行目标函数的极小化,直到收敛。由于负梯度方向是使函数值下降最快的方向,在迭代的每一步,以负梯度方向更新 x x x的值,从而达到减少函数值的目的。
由于 f ( x ) f(x) f(x)具有一阶连续偏导数,若第 k k k次迭代值为 x ( k ) x^{(k)} x(k),则可将 f ( x ) f(x) f(x)在 x ( k ) x^{(k)} x(k)附近进行一阶泰勒展开:
f ( x ) = f ( x ( k ) ) + g k T ( x − x ( k ) ) (19) f(x) = f(x^{(k)}) + g_k^T(x-x^{(k)}) \tag{19} f(x)=f(x(k))+gkT(x−x(k))(19)
在人工智能高等数学中我们知道在 x = a x=a x=a点的泰勒展开式为:
g ( x ) = f ( a ) + f ′ ( a ) 1 ! ( x − a ) + f ′ ′ ( a ) 2 ! ( x − a ) 2 + f 3 ( a ) 3 ! ( x − a ) 3 + . . . + f n ( a ) n ! ( x − a ) n (20) g(x) = f(a) + \frac{f^\prime(a)}{1!}(x-a) + \frac{f^{\prime\prime}(a)}{2!}(x-a)^2 + \frac{f^3(a)}{3!}(x-a)^3 + ... + \frac{f^n(a)}{n!}(x-a)^n \tag{20} g(x)=f(a)+1!f′(a)(x−a)+2!f′′(a)(x−a)2+3!f3(a)(x−a)3+...+n!fn(a)(x−a)n(20)
这里去掉了高阶项就得到了公式 ( 19 ) (19) (19), g k = g ( x ( k ) ) = ∇ f ( x ( k ) ) g_k=g(x^{(k)})=\nabla f(x^{(k)}) gk=g(x(k))=∇f(x(k))为 f ( x ) f(x) f(x)在 x ( k ) x^{(k)} x(k)的梯度,即一阶偏导。
求出第 k + 1 k+1 k+1次迭代值 x ( k + 1 ) x^{(k+1)} x(k+1):
x ( k + 1 ) ← x ( k ) + λ k p k (21) x^{(k+1)} \leftarrow x^{(k)} + \lambda_k p_k \tag{21} x(k+1)←x(k)+λkpk(21)
其中, p k p_k pk是搜索方向,取负梯度方向 p k = − ∇ f ( x ( k ) ) p_k= -\nabla f(x^{(k)}) pk=−∇f(x(k)), λ k \lambda_k λk是步长,这里由一维搜索确定,即找到 λ k \lambda_k λk使得
f ( x ( k ) + λ k p k ) = min λ ≥ 0 f ( x ( k ) + λ p k ) (22) f(x^{(k)} + \lambda_k p_k) = \min_{\lambda \geq 0} f(x^{(k)} + \lambda p_k) \tag{22} f(x(k)+λkpk)=λ≥0minf(x(k)+λpk)(22)
一维搜索是一种优化算法,也被称为线性搜索。在机器学习中,一维搜索通常是用来确定如何更新模型参数的步长或学习率,以最小化训练数据上的损失函数。
一维搜索可以简单理解为在某个方向上寻找一个合适的步长,使得当前位置向这个方向前进这个步长之后,能够使目标函数(或者损失函数)达到最小值。其实现过程通常是沿着负梯度方向进行搜索,并通过逐步缩小搜索范围和增加精度等方法,找到一个近似的最优解。
因为一维搜索只在一个方向上进行搜索,在复杂的高维问题中很少直接使用,通常会作为其他更复杂优化算法的辅助手段。
梯度下降法算法如下:
输入: 目标函数 f ( x ) f(x) f(x),梯度函数 g ( x ) = ∇ f ( x ) g(x) = \nabla f(x) g(x)=∇f(x),计算精度 ϵ \epsilon ϵ;
输出: f ( x ) f(x) f(x)的极小点 x ∗ x^* x∗。
(1) 取初值 x ( 0 ) ∈ R n x^{(0)} \in \Bbb R^n x(0)∈Rn,令 k = 0 k=0 k=0。
(2) 计算 f ( x ( k ) ) f(x^{(k)}) f(x(k))。
(3) 计算梯度 g k = g ( x ( k ) ) g_k=g(x^{(k)}) gk=g(x(k)),当 ∣ ∣ g k ∣ ∣ < ϵ ||g_k|| < \epsilon ∣∣gk∣∣<ϵ时,停止迭代,令 x ∗ = x ( k ) x^*=x^{(k)} x∗=x(k);否则,令 p k = − g ( x ( k ) ) p_k=-g(x^{(k)}) pk=−g(x(k)),求 λ k \lambda_k λk使
f ( x ( k ) + λ k p k ) = min λ ≥ 0 f ( x ( k ) + λ p k ) f(x^{(k)} + \lambda_k p_k) = \min_{\lambda \geq 0} f(x^{(k)} + \lambda p_k) f(x(k)+λkpk)=λ≥0minf(x(k)+λpk)
(4) 置 x ( k + 1 ) = x ( k ) + λ k p k x^{(k+1)}=x^{(k)} + \lambda_kp_k x(k+1)=x(k)+λkpk,计算 f ( x ( k + 1 ) ) f(x^{(k+1)}) f(x(k+1))
当 ∣ ∣ f ( x ( k + 1 ) ) − f ( x ( k ) ) ∣ ∣ < ϵ ||f(x^{(k+1)}) - f(x^{(k)})|| < \epsilon ∣∣f(x(k+1))−f(x(k))∣∣<ϵ或 ∣ ∣ x ( k + 1 ) − x ( k ) ∣ ∣ < ϵ ||x^{(k+1)} - x^{(k)}|| < \epsilon ∣∣x(k+1)−x(k)∣∣<ϵ时,停止迭代,令 x ∗ = x ( k + 1 ) x^*=x^{(k+1)} x∗=x(k+1)。
(5) 否则,置 k = k + 1 k=k+1 k=k+1,转(3)。
当目标函数是凸函数时,梯度下降法的解释全局最优解。但一般情况下,其解不保证是全局最优解。且收敛速度也未必是很快的。
如果是无约束优化问题,想要收敛速度快的话,可以考虑牛顿法或拟牛顿法。
牛顿法和拟牛顿法都是求解无约束最优化问题的常用方法,具有收敛速度快的优点。牛顿法是迭代算法,每一步需要求解目标函数的海森矩阵的逆矩阵,计算比较复杂,而且有时候海森矩阵不一定存在逆阵。拟牛顿法通过正定矩阵近似海森矩阵的逆矩阵或海森矩阵,简化了这一计算过程。
相关文章:
最优化简明版(上)
引言 本文简单地介绍一些凸优化(Convex Optimization)的基础知识,可能不会有很多证明推导,目的是能快速应用到机器学习问题上。 凸集 直线与线段 设 x 1 ≠ x 2 x_1 \neq x_2 x1x2为 R n \Bbb R^n Rn空间中的两个点,那么具有下列形…...

MySQL的一些介绍
1. SQL的select语句完整的执行顺序 SQL Select语句完整的执行顺序: 1、from子句组装来自不同数据源的数据; 2、where子句基于指定的条件对记录行进行筛选; 3、group by子句将数据划分为多个分组; 4、使用聚集函数进行计算&am…...
unity发布webGL后无法预览解决
众所周知,unity发布成webgl后是无法直接预览的。因为一般来说浏览器默认都是禁止webgl运行的。 直接说我最后的解决方法:去vscode里下载一个live server ,安装好。 下载vscode地址Visual Studio Code - Code Editing. Redefined 期间试过几种方法都不管…...
Flume和Kafka的组合使用
一.安装Kafka 1.1下载安装包 通过百度网盘分享的文件:复制链接打开「百度网盘APP 即可获取」 链接:https://pan.baidu.com/s/1vC6Di3Pml6k1KMbnK0OE1Q?pwdhuan 提取码:huan 也可以访问官网,下载kafka2.4.0的安装文件 1.2解…...
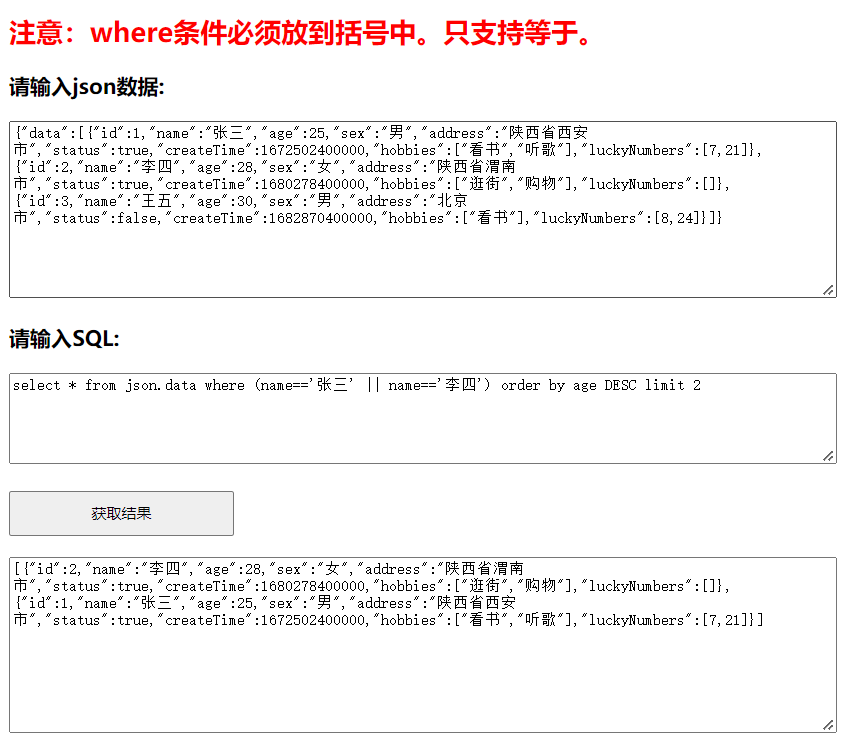
JSONSQL:使用SQL过滤JSON类型数据(支持多种数据库常用查询、统计、平均值、最大值、最小值、求和语法)...
1. 简介 在开发中,经常需要根据条件过滤大批量的JSON类型数据。如果仅需要过滤这一种类型,将JSON转为List后过滤即可;如果相同的条件既想过滤数据库表中的数据、也想过滤内存中JSON数据,甚至想过滤Elasticsearch中的数据ÿ…...
Linux输入输出重定向
目录 Linux输入输出重定向 Linux中的默认设备 输入输出重定向定义 输入输出重定向操作符 实用形式 标准输入、标准输出、标准错误 输出重定向案例 案例1 --- 输出重定向(覆盖) 案例2 --- 输出重定向(追加) 案例3 --- 错误…...
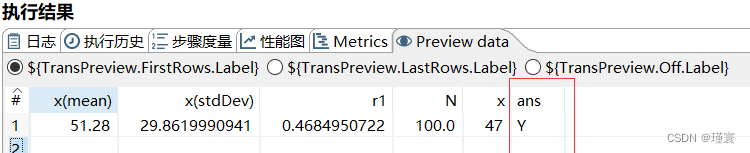
使用kettle进行数据统计
1.使用kettle设计一个能生成100个取值范围为0到100随机整数的转换。 为了完成该转换,需要使用生成记录控件、生成随机数控件、计算器控件及字段选择控件。控件布局如下图所示 生成记录控件可以在限制框内指定生成记录的个数,具体配置如图所示 生成随机数…...

线程的取消和清理
一、线程的取消 意义:随时杀掉一个线程 int pthread_cancel(pthread_t thread); 注意:线程的取消要有取消点才可以,不是说取消就取消,线程的取消点主要是阻塞的系统调用 二、运行段错误调试 可以使用gdb调试 使用gdb 运行代…...
day8 -- 全文本搜索
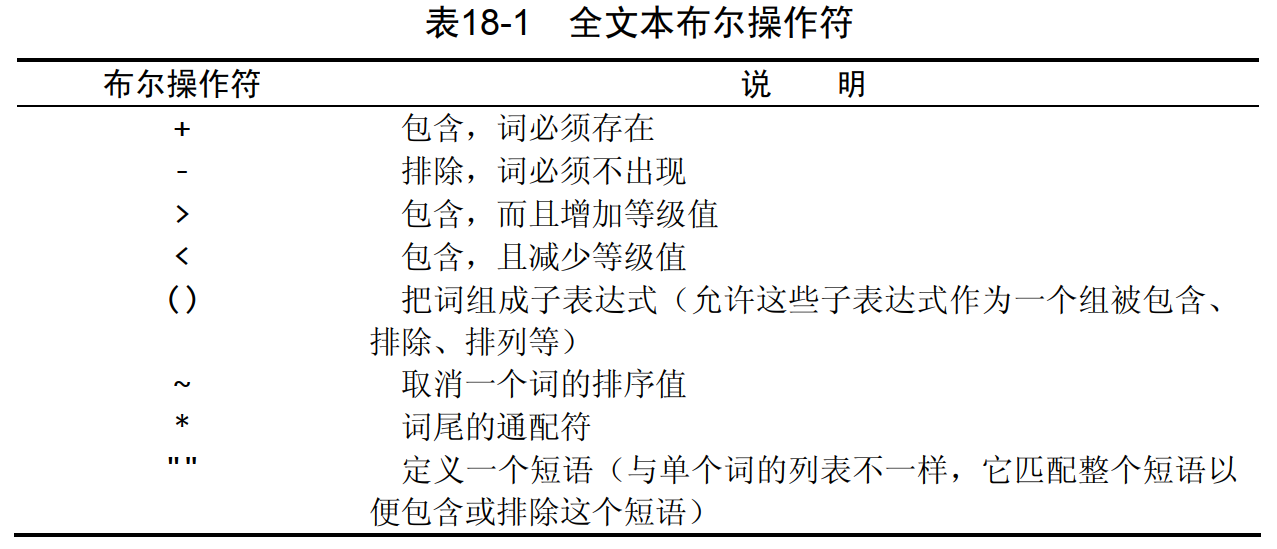
brief InnoDB存储引擎从MySQL 5.6开始支持全文本搜索。具体来说,MySQL使用InnoDB存储引擎的全文本搜索功能称为InnoDB全文本搜索(InnoDB Full-Text Search)。InnoDB全文本搜索支持标准的全文本搜索查询语法和多语言分词器,因此可…...

C语言:if-else语句
嗨,今天咱们讲讲C语言控制语句里的条件选择,主要总结下if else语句。 咱们生活里经常会有这样的场景,明天该怎么穿呢,得考虑下具体的天气。如果是晴天,温度还不错,可以穿T恤;如果是阴天…...

C语言---函数
1、函数是什么 学习库函数网站: https://cplusplus.com/reference/http://en.cppreference.comhttp://zh.cppreference.com 我们参考文档,学习几个库函数 2、库函数 3、自定义函数 自定义函数和库函数一样,有函数名,返回值类…...
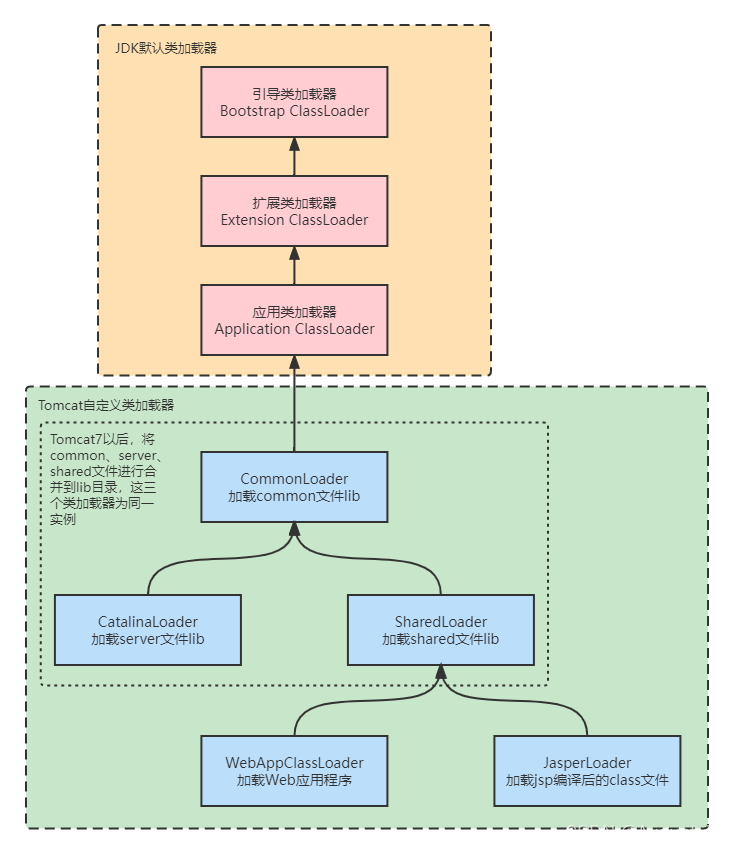
【JVM】什么是双亲委派机制?
一、为什么会有这种机制? 类加载器将.class类加载到内存中时,为了避免重复加载(确保Class对象的唯一性)以及JVM的安全性,需要使用某一种方式来实现只加载一次,加载过就不能被修改或再次加载。 二、什么是双…...
Vulkan Tutorial 7 纹理贴图
目录 23 图像 图片库 暂存缓冲区 纹理图像 布局转换 将缓冲区复制到图像上 准备纹理图像 传输屏障掩码 清除 24 图像视图和采样器 纹理图像视图 采样器 Anisotropy 设备特征 25 组合图像采样器 更新描述符 纹理坐标系 着色器 23 图像 添加纹理将涉及以下步骤&am…...

LinkedBlockingQueue阻塞队列
➢ LinkedBlockingQueue阻塞队列 LinkedBlockingQueue类图 LinkedBlockingQueue 中也有两个 Node 分别用来存放首尾节点,并且里面有个初始值为 0 的原子变量 count 用来记录队列元素个数,另外里面有两个ReentrantLock的独占锁,分别用来控制…...

面试-Redis 常见问题,后续面试遇到新的在补充
面试-Redis 1.谈谈Redis 缓存穿透,击穿,雪崩及如何避免 缓存穿透:是指大量访问请求在访问一个不存在的key,由于key 不存在,就会去查询数据库,数据库中也不存在该数据,无法将数据存储到redis 中…...

2023年上半年数据库系统工程师上午真题及答案解析
1.计算机中, 系统总线用于( )连接。 A.接口和外设 B.运算器、控制器和寄存器 C.主存及外设部件 D.DMA控制器和中断控制器 2.在由高速缓存、主存和硬盘构成的三级存储体系中,CPU执行指令时需要读取数据,那么DMA控制器和中断CPU发出的数据地…...

设计模式概念
设计模式是软件工程领域中常用的解决问题的经验总结和最佳实践。它们提供了一套被广泛接受的解决方案,用于处理常见的设计问题,并促进可重用、可扩展和易于维护的代码。 设计模式的主要目标是提高软件的可重用性、可扩展性和灵活性,同时降低…...

arcpy批量对EXCE经纬度L进行投点,设置为wgs84坐标系,并利用该点计算每个区域内的核密度
以下是在 ArcPy 中批量对 Excel 经纬度 L 进行投点,设置为 WGS84 坐标系,并利用该点计算每个区域内的核密度的详细步骤: 1. 准备数据: 准备包含经纬度信息的 Excel 数据表格,我们假设文件路径为 "C:/Data/locations.xlsx&qu…...
Yolov5训练自己的数据集
先看下模型pt说明 YOLOv5s:这是 YOLOv5 系列中最小的模型。“s” 代表 “small”(小)。该模型在计算资源有限的设备上表现最佳,如移动设备或边缘设备。YOLOv5s 的检测速度最快,但准确度相对较低。 YOLOv5m࿱…...

Bert+FGSM中文文本分类
我上一篇博客已经分别用BertFGSM和BertPGD实现了中文文本分类,这篇文章与我上一篇文章BertFGSM/PGD实现中文文本分类(Loss0.5L10.5L2)_Dr.sky_的博客-CSDN博客的不同之处在于主要在对抗训练函数和embedding添加扰动部分、模型定义部分、Loss函数传到部分…...

书匠策AI拆解手册:它是怎么帮你把毕业论文从0拉到1的?
同学们好,我是你们的论文科普老司机。 今天不整虚的,直接拿一个工具开刀——书匠策AI( 官网直达:www.shujiangce.com,微信搜一搜"书匠策AI"即可关注公众号)。 这篇文章的目的只有一个ÿ…...

Android Studio中文界面全面配置指南:专业汉化解决方案
Android Studio中文界面全面配置指南:专业汉化解决方案 【免费下载链接】AndroidStudioChineseLanguagePack AndroidStudio中文插件(官方修改版本) 项目地址: https://gitcode.com/gh_mirrors/an/AndroidStudioChineseLanguagePack Android Studi…...

FreeMove:Windows系统C盘空间终极清理方案,无需重装释放数十GB
FreeMove:Windows系统C盘空间终极清理方案,无需重装释放数十GB 【免费下载链接】FreeMove Move directories without breaking shortcuts or installations 项目地址: https://gitcode.com/gh_mirrors/fr/FreeMove 还在为C盘空间不足而烦恼吗&…...

终极指南:使用Python脚本突破百度网盘限速壁垒
终极指南:使用Python脚本突破百度网盘限速壁垒 【免费下载链接】baidu-wangpan-parse 获取百度网盘分享文件的下载地址 项目地址: https://gitcode.com/gh_mirrors/ba/baidu-wangpan-parse 在云存储服务日益普及的今天,百度网盘凭借其庞大的用户基…...

k-Mode聚类算法原理与手写实现:专治分类数据的无监督学习利器
1. 项目概述:为什么k-Mode不是k-Means的“换皮版”,而是一把专治分类数据的手术刀你有没有遇到过这样的场景:手头有一批客户数据,字段全是“性别:男/女”、“城市:北京/上海/广州”、“会员等级:…...

群晖SSH远程访问全链路打通指南
1. 为什么群晖的SSH不是“开个开关”就完事的很多人第一次在群晖DSM界面里点开“控制面板 > 终端机和SNMP > 启用SSH服务”,看到端口22打钩、状态显示“已启用”,就以为大功告成,兴冲冲拿Mac或Windows的终端连一下——结果ssh admin192…...

深入剖析Golang环境搭建:从基础配置到高效开发实践
1. 项目概述:为什么Golang环境搭建值得深究?如果你刚接触Go语言,可能会觉得“环境搭建”不就是下载、安装、配个变量吗?网上教程一搜一大把,五分钟搞定。但作为一名在多个生产环境中部署过Go服务的老兵,我必…...

为什么你的ElevenLabs马来文输出总像“机器人朗读”?资深语音架构师拆解4层韵律建模断层与3个修复级prompt模板
更多请点击: https://intelliparadigm.com 第一章:为什么你的ElevenLabs马来文输出总像“机器人朗读”?资深语音架构师拆解4层韵律建模断层与3个修复级prompt模板 马来语(Bahasa Melayu)虽属声调中性语言,…...

告别单片机C语言:用FlexLua和CH9329模块5分钟自制USB自动化小工具
零代码革命:用FlexLuaCH9329打造办公自动化神器 每天重复点击鼠标、敲击键盘的枯燥操作是否让你疲惫不堪?想象一下,早晨电脑自动打卡、会议自动记录、邮件自动回复——这些看似需要专业编程知识的自动化操作,现在只需5分钟就能实现…...

UxPlay应用场景:从家庭娱乐到企业演示的全面解决方案
UxPlay应用场景:从家庭娱乐到企业演示的全面解决方案 【免费下载链接】UxPlay AirPlay Unix mirroring server 项目地址: https://gitcode.com/gh_mirrors/uxp/UxPlay UxPlay是一款功能强大的AirPlay Unix镜像服务器,它让Linux、macOS和Unix系统能…...