FreeRTOS实时操作系统(二)系统文件代码学习
文章目录
- 前言
- 系统配置
- 任务创建
- 任务创建删除实践
前言
接着学习正点原子的FreeRTOS教程,涉及到一些详细的系统内文件代码
系统配置
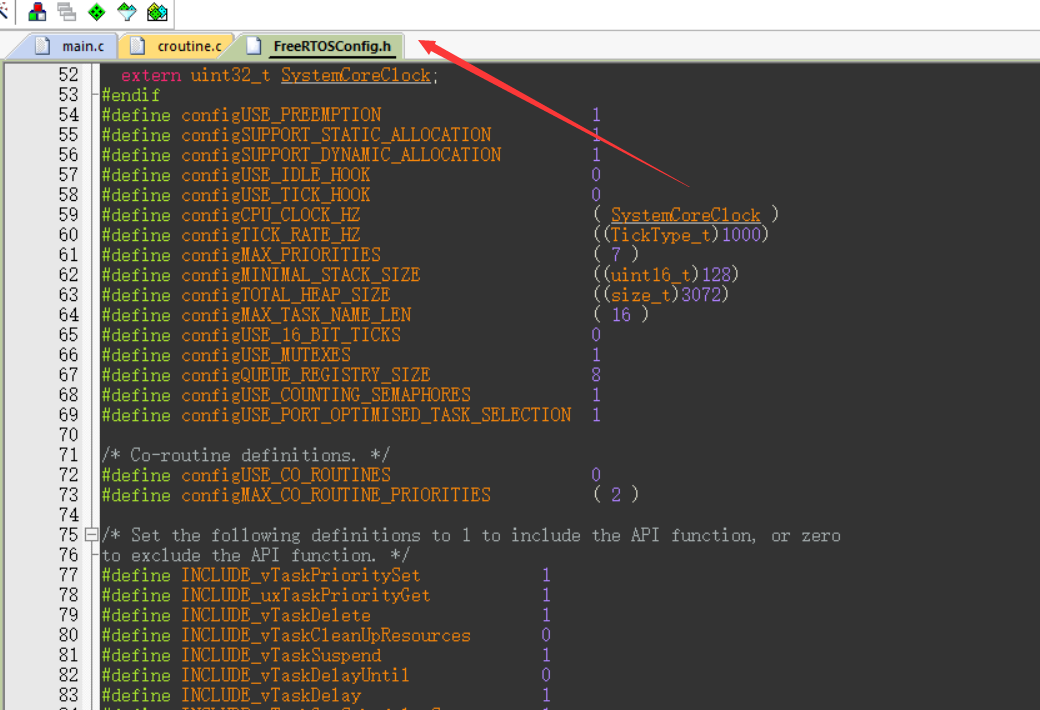
可以通过各种的宏定义来实现我们自己的RTOS配置(在FreeRTOSconfig.h)
- “INCLUDE”:配置API函数
- ”config“:完成功能配置和裁剪
- 其他配置项LPendSV宏定义,SVC宏定义
任务创建
分为静态和动态创建
动态任务创建:任务的任务控制块以及任务的栈空间所需的内存,均由自动从堆中分配
静态创建任务:任务的任务控制块以及任务的栈空间所需的内存,需用户分配提供
任务创建:

返回值:
pdPASS:创建成功
errCOULD_NOT_ALLOCATE_REQUIRED_MEMORY:创建失败(内存分配失败)
如何成功创建:
- 将宏configSUPPORT_DYNAMIC_ALLOCATION 配置为 1
- 定义函数入口参数
- 编写任务函数
任务控制块:
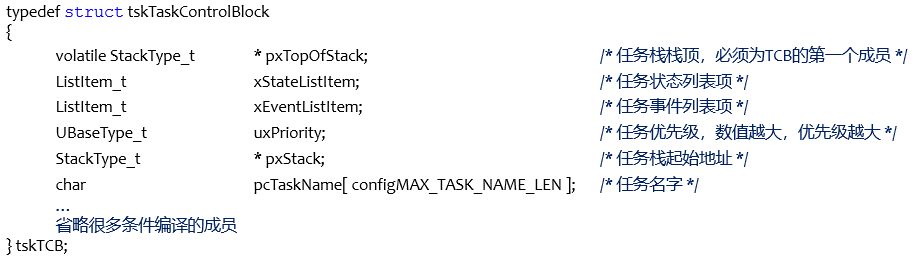
每个任务都有属于自己的任务控制块,类似身份证。
静态创建任务:
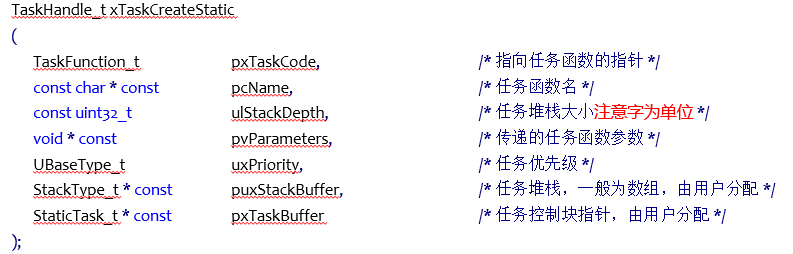
返回值:
NULL:用户没有提供相应的内存,任务创建失败
其他值:任务句柄,任务创建成功
如何成功创建:
- 需将宏configSUPPORT_STATIC_ALLOCATION 配置为 1
- 定义空闲任务&定时器任务的任务堆栈及TCB
- 实现两个接口函数:vApplicationGetIdleTaskMemory( ) ,vApplicationGetTimerTaskMemory ( )
- 定义函数入口参数
- 编写任务函数
任务删除:
void vTaskDelete(TaskHandle_t xTaskToDelete);
参数是待删除任务的任务句柄,用于删除已被创建的任务,被删除的任务将从就绪态任务列表、阻塞态任务列表、挂起态任务列表和事件列表中移除
要点:
- 当传入的参数为NULL,则代表删除任务自身(当前正在运行的任务)
- 空闲任务会负责释放被删除任务中由系统分配的内存,但是由用户在任务删除前申请的内存, 则需要由用户在任务被删除前提前释放,否则将导致内存泄露
如何删除:
- 使用删除任务函数,需将宏INCLUDE_vTaskDelete 配置为 1
- 入口参数输入需要删除的任务句柄(NULL代表删除本身)
任务创建删除实践
1.任务创建删除:(正点原子的代码)
xTaskCreate((TaskFunction_t ) task1,(char * ) "task1",(configSTACK_DEPTH_TYPE ) TASK1_STACK_SIZE,(void * ) NULL,(UBaseType_t ) TASK1_PRIO,(TaskHandle_t * ) &task1_handler );
利用该函数创建任务,从上到下分别是指向任务函数的指针,任务名,堆栈大小,任务指针参数,优先级,任务句柄。但是我感觉不需要强制类型转换,有时写错也不容易发现
一般系统初始化的操作是先创建一个任务,这个任务完成系统所有任务的创建,创建完成后把自己删除掉的结构,这样代码比较简洁,结构清晰。
/* START_TASK 任务 配置* 包括: 任务句柄 任务优先级 堆栈大小 创建任务*/
#define START_TASK_PRIO 1
#define START_TASK_STACK_SIZE 128
TaskHandle_t start_task_handler;
void start_task( void * pvParameters );/* TASK1 任务 配置* 包括: 任务句柄 任务优先级 堆栈大小 创建任务*/
#define TASK1_PRIO 2
#define TASK1_STACK_SIZE 128
TaskHandle_t task1_handler;
void task1( void * pvParameters );/* TASK2 任务 配置* 包括: 任务句柄 任务优先级 堆栈大小 创建任务*/
#define TASK2_PRIO 3
#define TASK2_STACK_SIZE 128
TaskHandle_t task2_handler;
void task2( void * pvParameters );/* TASK3 任务 配置* 包括: 任务句柄 任务优先级 堆栈大小 创建任务*/
#define TASK3_PRIO 4
#define TASK3_STACK_SIZE 128
TaskHandle_t task3_handler;
void task3( void * pvParameters );
void freertos_demo(void) //先创建一个任务{ xTaskCreate((TaskFunction_t ) start_task,(char * ) "start_task",(configSTACK_DEPTH_TYPE ) START_TASK_STACK_SIZE,(void * ) NULL,(UBaseType_t ) START_TASK_PRIO,(TaskHandle_t * ) &start_task_handler );vTaskStartScheduler(); //开始调度,否则不会执行start_task任务
}void start_task( void * pvParameters ) //这个任务完成所有任务的创建
{taskENTER_CRITICAL(); /* 进入临界区 */xTaskCreate((TaskFunction_t ) task1,(char * ) "task1",(configSTACK_DEPTH_TYPE ) TASK1_STACK_SIZE,(void * ) NULL,(UBaseType_t ) TASK1_PRIO,(TaskHandle_t * ) &task1_handler );xTaskCreate((TaskFunction_t ) task2,(char * ) "task2",(configSTACK_DEPTH_TYPE ) TASK2_STACK_SIZE,(void * ) NULL,(UBaseType_t ) TASK2_PRIO,(TaskHandle_t * ) &task2_handler );xTaskCreate((TaskFunction_t ) task3,(char * ) "task3",(configSTACK_DEPTH_TYPE ) TASK3_STACK_SIZE,(void * ) NULL,(UBaseType_t ) TASK3_PRIO,(TaskHandle_t * ) &task3_handler );........................vTaskDelete(NULL);taskEXIT_CRITICAL(); /* 退出临界区 */
}/* 任务一,实现LED0每500ms翻转一次 */
void task1( void * pvParameters )
{while(1){printf("task1正在运行!!!\r\n");LED0_TOGGLE();vTaskDelay(500);}
}
.................
.................
................
这里vTaskStartScheduler()函数执行后,系统就会开始执行任务,但是很明显,真正的任务都没开始创建,且因为系统按照从上往下执行,所以会先创建的任务先执行,不按照优先级走,等所有任务创建完成后,系统才开始真正按照优先级开始执行任务。
我觉得FreeRTOS的执行过程就是一个一个任务的执行,他是通过执行完一个任务后,再执行下一个,遇到优先级比它高的任务,会被打断,这也就是为什么创建task1后,系统就停下了start_task工作,执行task1的代码了,执行完task1后,又回去初始化task2。感觉 vTaskDelay()函数是系统调度的一个灵活工具。让系统从循环执行任务(还是很像裸机),开始进行灵活分配cpu了
这里用到了临界区,FreeRTOS临界区是指那些必须完整运行,不能被打断的代码段,比如有的外设的初始化需要严格的时序,初始化过程中不能被打断。进入临界区代码的时候需要关闭中断,当处理完临界区代码以后再打开中断。起到一个代码保护的作用。
感觉这个FreeRTOS和之间裸机开发时,看到很多人的程序利用uwTick的数值来执行程序很像,但当然FreeRTOS强大的多,如下:
__weak void HAL_IncTick(void) //利用滴答定时器(一般1ms累加一次)
{uwTick += uwTickFreq;
}void deme()
{if(uwTick-led_tick>1000) //实现每隔1000个计数执行一次代码{led_tick=uwTick;..................}}
2.HAL库创建任务:
利用STM32CubeMX生成的FreeRTOS来实现,与正点原子(手动移植)有些区别
我这里简单写了一个点灯任务进行测试,可以正常运行
TaskHandle_t task1_handler;void vTaskCode( void * pvParameters ){while(1){HAL_GPIO_TogglePin(GPIOB, GPIO_PIN_4); vTaskDelay(500);}}void vOtherFunction( void ){xTaskCreate( vTaskCode, "tak1", 128, NULL, 1, &task1_handler );//vTaskStartScheduler();}int main(void)
{/* MCU Configuration--------------------------------------------------------*//* Reset of all peripherals, Initializes the Flash interface and the Systick. */HAL_Init();/* Configure the system clock */SystemClock_Config();/* Initialize all configured peripherals */MX_GPIO_Init();/* Init scheduler */osKernelInitialize(); /* Call init function for freertos objects (in freertos.c) */MX_FREERTOS_Init(); vOtherFunction(); //放在操作系统内核启动前/* Start scheduler */ osKernelStart();while (1){}
}
有些不懂的地方,首先我自己不需要启动任务调度了,当然执行这个函数vTaskStartScheduler()也没啥问题,但是这个任务创建放的位置需要在osKernelStart()前面,正点原子的如下,不是特别理解,为啥放在操作系统内核启动,开始任务调度后就不能运行了。
查了查资料,可能是任务调度开启之后,就正式进入FreeRTOS系统接管领域,之后程序只会跑在中断和任务函数中,也就是说如果放在后面,根本就不会执行,一个任务都没创建。而正点原子手动开启任务调度前已经创建了一个任务,所以他才成功了。
int main(void)
{HAL_Init(); /* 初始化HAL库 */sys_stm32_clock_init(360, 25, 2, 8); /* 设置时钟,180Mhz */delay_init(180); /* 延时初始化 */usart_init(115200); /* 串口初始化为115200 */led_init(); /* 初始化LED */key_init(); /* 初始化按键 */sdram_init(); /* SRAM初始化 */lcd_init(); /* 初始化LCD */my_mem_init(SRAMIN); /* 初始化内部内存池 */my_mem_init(SRAMEX); /* 初始化外部内存池 */my_mem_init(SRAMCCM); /* 初始化CCM内存池 */ freertos_demo(); //任务创建
}
终于算开始入门了,之后继续学习。
相关文章:
FreeRTOS实时操作系统(二)系统文件代码学习
文章目录 前言系统配置任务创建任务创建删除实践 前言 接着学习正点原子的FreeRTOS教程,涉及到一些详细的系统内文件代码 系统配置 可以通过各种的宏定义来实现我们自己的RTOS配置(在FreeRTOSconfig.h) “INCLUDE”:配置API函数…...

分布式驱动电动汽车定速巡航控制
目录 前言 1. 电机模型 1.1电机数学模型 1.2 电机传递函数模型 2. 控制器设计...

如何启动和关闭分布式集群
分布式集群是由多个节点组成的系统,可以提供高性能、高可用、高扩展的数据处理能力。本文介绍如何启动和关闭一个包含hadoop、zookeeper、hbase和spark的分布式集群。 目录 启动顺序 关闭顺序 启动和关闭hadoop 启动hadoop 关闭hadoop 查看网页 启动和关闭z…...

WLAN基本概述及简单组网配置
WLAN概述 WLAN即Wireless LAN(无线局域网),是指通过无线技术构建的无线局域网络。WLAN广义上是指以无线电波、激光、红外线等无线信号来代替有线局域网中的部分或全部传输介质所构成的网络。 家庭WLAN产品: 家庭Wi-Fi路由器:通过把有线网络信号转换成无线信号,供家庭电…...

响应式Web设计单元测试
响应式Web设计单元测试 一. 单选题 (共8题,40.0分)二. 多选题 (共5题,25.0分)三. 判断题 (共7题,35.0分) 一. 单选题 (共8题,40.0分) …...

linux计划任务管理
1. crond计划任务概述 什么是计划任务,计划任务类似于我们平时生活中的闹钟。 在Linux系统的计划任务服务crond可以满足周期性执行任务的需求。 crond进程每分钟会处理一次计划任务, 计划任务主要是做一些周期性的任务目前最主要的用途是定时备份数据 Schedule on…...

研一,有点迷茫。
作者:阿秀 校招八股文学习网站:https://interviewguide.cn 这是阿秀的第「277」篇原创 小伙伴们大家好,我是阿秀。 最近回答了不少大一大二研一在读的学习圈中学弟学妹的咨询问题,基本都是计算机学习、进度、疑惑等等相关的问题&a…...
【新版】系统架构设计师 - 软件工程
个人总结,仅供参考,欢迎加好友一起讨论 文章目录 架构 - 软件工程考点摘要软件工程概述软件能力成熟度模型软件过程模型瀑布模型原型化模型增量模型螺旋模型喷泉模型V模型迭代与增量的概念CBSD基于构件的模型(构件组装模型/基于构件的软件开发…...

html实现好看的个人介绍,个人主页模板3(附源码)
文章目录 1.设计来源1.1 主界面1.2 关于我界面1.3 教育成就界面1.4 项目演示界面1.5 联系我界面 2.效果和源码2.1 动态效果2.2 源代码2.2 源代码目录 源码下载 作者:xcLeigh 文章地址:https://blog.csdn.net/weixin_43151418/article/details/131263195 …...

某大厂工作3年,被劣驱良了。。。
最近在知乎上看到一个问题:编程界的劣驱良现象有哪些? 要想回答这个问题,首先要定义清楚,什么是「劣」什么是「良」? 如果你认为编程技术牛x就是「良」,编程技术差就是「劣」,那可以清楚的回答…...

爱奇艺大数据加速:从Hive到Spark SQL
01 导语 爱奇艺自2012年开展大数据业务以来,基于大数据开源生态服务建设了一系列平台,涵盖了数据采集、数据处理、数据分析、数据应用等整个大数据流程,为公司的运营决策和各种数据智能业务提供了强有力的支持。随着数据规模的不断增长和计算…...

c++构造函数的多个细节拷问
提问1 能在 构造函数里面调用 虚函数吗? 调用的 是这个类自己的 虚函数吗? 这个问题 等价于 虚函数表什么时候形成的? 回答1 答:在构造函数里面 可以调用虚函数哈 不过是父类的 子类对象还没有创建完成 所以 尽量不要在 构造里…...
Redis入门 - Lua脚本
原文首更地址,阅读效果更佳! Redis入门 - Lua脚本 | CoderMast编程桅杆https://www.codermast.com/database/redis/redis-scription.html Redis 脚本使用 Lua 解释器来执行脚本。 Redis 2.6 版本通过内嵌支持 Lua 环境。执行脚本的常用命令为 EVAL。 …...
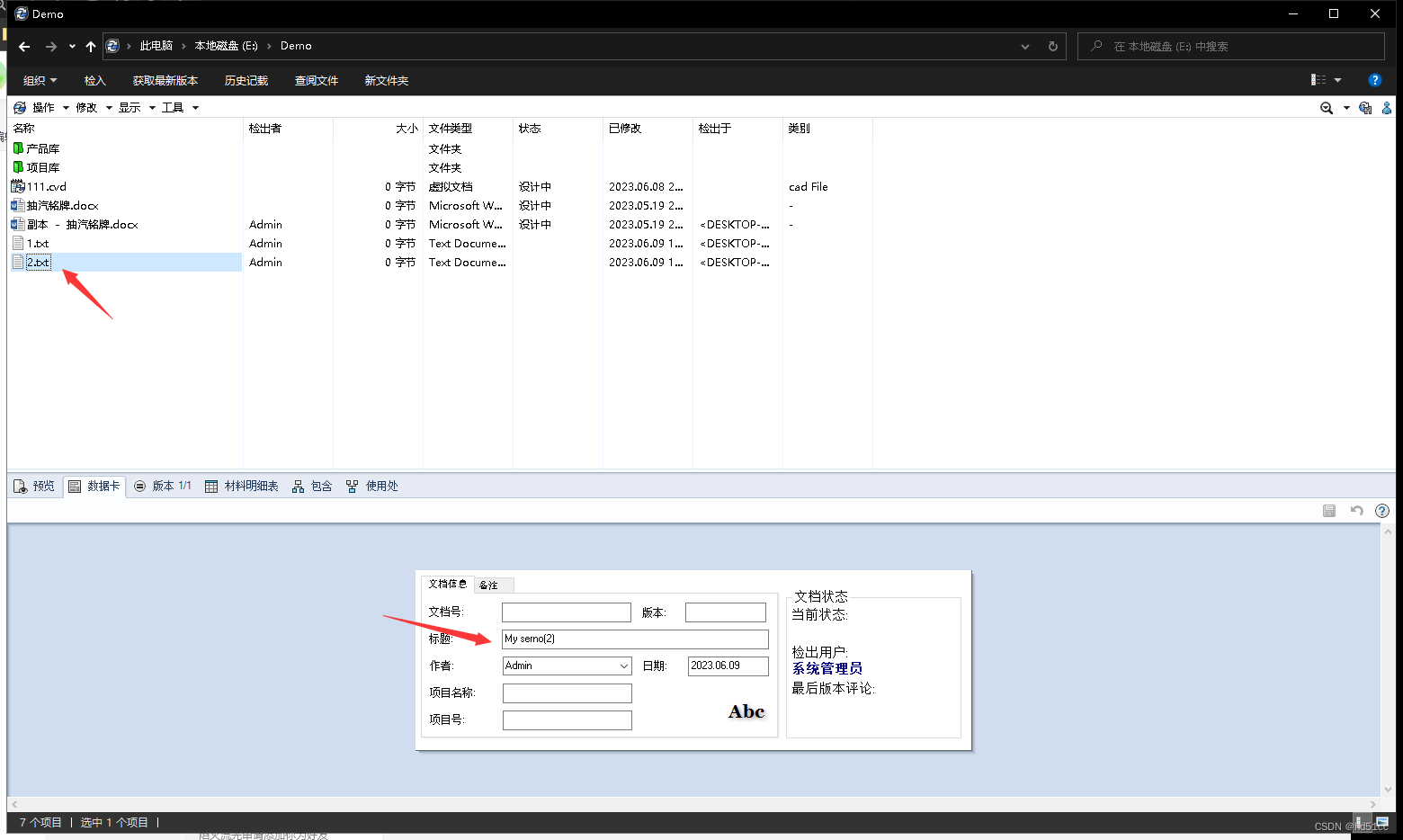
Creating Serial Numbers (C#)
此示例展示如何使用Visual C#编写的Add-ins为文件数据卡生成序列号。 注意事项: SOLIDWORKS PDM Professional无法强制重新加载用.NET编写的Add-ins,必须重新启动所有客户端计算机,以确保使用Add-ins的最新版本。 SOLIDWORKS PDM Professio…...

pycharm使用之torch_geometric安装
正式安装之前要先查看一下torch的版本 一、查看torch版本 1、winR ,输入cmd 2、输入python 3、 输入import torch,然后输入torch.__version__,最后回车 可以看到我的torch版本是1.10.0 二、下载合适的版本 1、打开链接 https://pytorch-…...

spring-mvc 工作流程
一、概述 spring-mvc 主要是DispatcherServlet工作流程流程可以分为两块,第一块为DispatcherServlet的加载,第二块为请求处理 二、DispatcherServlet的加载 主要依靠三个对象 DispatcherServletRegistrationBean:实现了ServletContextInit…...

物联网Lora模块从入门到精通(六)OLED显示屏
一、前言 获取到数据后我们常需要在OLED显示屏上显示,本文中我们需要使用上一篇文章(光照与温湿度数据获取)的代码,在其基础上继续完成本文内容。 基础代码: #include <string.h> #include "board.h" #include "hal_ke…...
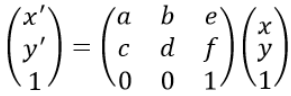
平面坐标变换(单应性变换/Homography变换)
单应性(homography)变换用来描述物体在两个平面之间的转换关系,可以用于描述平移、翻转、缩放、旋转、仿射变换等。其是对应齐次坐标下的线性变换,可以通过矩阵表示: 其中,H为单应性变换矩阵,假设变换前坐标为(x,y)&am…...

大数据项目常识
大数据项目 随着社会的进步,大数据的高需求,高薪资,高待遇,促使很多人都来学习和转行到大数据这个行业。学习大数据是为了什么?成为一名大数据高级工程师。而大数据工程师能得到高薪、高待遇的能力在哪?自…...

Linux系统:常用服务端口
目录 一、理论 1.端口分类 2.传输协议 3.常用端口 一、理论 1.端口分类 一个计算机最多有65535个端口,端口不能重复。Linux 只有 root 用户可以使用1024以下的端口。 表1 端口分类 端口范围说明公认端口(Well-KnownPorts)0 - 1023这类…...

终极指南:用foo2zjs驱动100+型号打印机在Linux上完美工作
终极指南:用foo2zjs驱动100型号打印机在Linux上完美工作 【免费下载链接】foo2zjs A linux printer driver for QPDL protocol - copy of http://foo2zjs.rkkda.com/ 项目地址: https://gitcode.com/gh_mirrors/fo/foo2zjs 核心关键词:foo2zjs Li…...

巨头转身难的地方,我们的星辰大海:开发版机巢,为千行百业而生
未来的低空经济图景是怎样的?它绝不仅仅是几架无人机在天上飞。 未来的城市与能源基础设施中,将隐藏着无数形态各异、能力专精的“机巢”。它们将像毛细血管一样渗透在城市的各个角落,定时自动穿梭,替代人力进行精细化巡检&#x…...

Windows: 深入剖析pip install SSLError与SSL模块缺失的根源及系统级修复
1. Windows下pip install SSLError的典型表现 最近在Windows系统上用pip安装Python包时,不少朋友都遇到了这样的报错信息:"Cant connect to HTTPS URL because the SSL module is not available"。这个错误通常会出现在使用清华源、阿里云源等…...
)
中标麒麟OS访问Win10共享文件夹,手把手教你搞定SMB连接(附终端挂载命令)
中标麒麟OS与Win10共享文件夹互通实战指南 在国产化办公环境逐步普及的今天,中标麒麟OS作为主流国产操作系统之一,与Windows系统之间的文件共享成为日常办公刚需。本文将针对零基础用户,提供两种高效稳定的SMB共享连接方案:图形化…...
)
收藏!小白/程序员轻松入门大模型,抓住AI时代职业发展机遇(附学习路线)
收藏!小白/程序员轻松入门大模型,抓住AI时代职业发展机遇(附学习路线) 本文系统介绍了AI大模型的学习路径,涵盖Transformer结构、主流大模型、预训练与后训练过程、模型压缩量化、MoE专家模型、RAG与Agent技术、部署与…...

如何快速掌握Diablo Edit2:暗黑破坏神2终极角色编辑器使用指南
如何快速掌握Diablo Edit2:暗黑破坏神2终极角色编辑器使用指南 【免费下载链接】diablo_edit Diablo II Character editor. 项目地址: https://gitcode.com/gh_mirrors/di/diablo_edit Diablo Edit2是一款功能强大的暗黑破坏神2角色存档编辑器,支…...

书匠策AI到底在干嘛?用“拆快递“的方式,给你科普它的毕业论文功能全流程
各位同学,你们有没有拆过那种"一步一步跟着说明书就能装好"的宜家家具? 今天我要用拆快递的逻辑,帮你把书匠策AI(官网:h 官网直达:www.shujiangce.com,微信公众号搜一搜"书匠策…...

MPU6050中断驱动数据采集与采样率优化实战
1. MPU6050中断机制与嵌入式开发实战 刚接触MPU6050时,我最头疼的就是数据采集的实时性问题。用轮询方式读取传感器数据不仅占用CPU资源,还经常错过关键的运动状态变化。后来发现中断机制才是解决问题的钥匙,就像有个贴心助手会在数据准备好…...

2026年程序员AI工具链完整配置指南:从开发到部署全流程
你的开发环境还在用2023年的工具?醒醒,AI工具链已经迭代了三代了。## 前言作为一个从 Cursor 0.x 版本就开始跟的早期用户,我亲眼见证了AI编程工具从"玩具"变成"生产力核武器"的过程。2026年5月的今天,整个AI…...

ArchR实战避坑指南:从scATAC-seq数据到细胞轨迹分析,我的踩坑记录与参数调优心得
ArchR实战避坑指南:从scATAC-seq数据到细胞轨迹分析 当你在深夜第三次尝试用ArchR处理scATAC-seq数据时,突然弹出的红色报错信息是否让你感到绝望?作为一款强大的单细胞染色质可及性分析工具,ArchR的官方教程虽然详尽,…...