Linux -- 线程
文章目录
- 1. 线程概念
- 1.1 概念
- 1.2 理解(Linux OS角度)
- 1.3 见一见
- 2. 线程优缺点
- 3. 线程使用
- 3.1 认识线程库
- 3.2 使用
- 3.2.1 线程创建
- 3.2.2 线程等待
- 3.2.3 线程退出
- 3.2.4 线程取消
- 3.2.5 获取线程id
- 3.2.6 线程分离
- 3.3 理解线程库
- 3.4 证明线程栈
- 3.5 线程局部存储
- 4. 线程互斥
- 4.1 相关概念
- 4.2 互斥场景
- 4.3 代码演示(模拟抢票)
- 4.4 细节
- 4.5 锁的实现原理
- 4.6 线程封装
- 5. 可重入函数和线程安全
- 5.1 概念
- 5.2 常见线程安全情况
- 5.3 常见不可重入情况
- 5.4 常见可重入情况
- 5.5 可重入函数和线程安全关系
- 5.6 可重入函数和线程安全的区别
- 6. 死锁
- 6.1 四个充分必要条件
- 6.2 避免死锁
- 7. 线程同步
- 7.1 概念
- 7.2 条件变量
- 7.2.1 条件变量初始化
- 7.2.2 条件变量销毁
- 7.2.3 条件变量等待
- 7.2.4 唤醒等待
- 7.3 demo
- 8. 生产者-消费者模型
- 8.1 概念
- 8.2 优点和关系
- 8.3 BlockQueue生产者-消费者模型
- 8.4 POSIX信号量
- 8.4.1 信号量初始化
- 8.4.2 信号量销毁
- 8.4.3 等待信号量
- 8.4.4 发布信号量
- 8.5 RingQueue生产者-消费者模型
- 9. 线程池
- threadpool_V1.hpp
- thread_library.hpp
- threadpool_V2.hpp
- lock_guard.hpp
- threadpool_V3.hpp
- task.hpp
- test.cc
- threadpool_V4.hpp
- test_threadpoolV4.cc
- 10. 常见锁
1. 线程概念
1.1 概念
- 线程是一个执行分支,执行粒度比进程更细,调度成本更低
- 线程是进程内部的一个执行流
- 线程是CPU调度的基本单位,进程是承担分配系统资源的基本实体
1.2 理解(Linux OS角度)
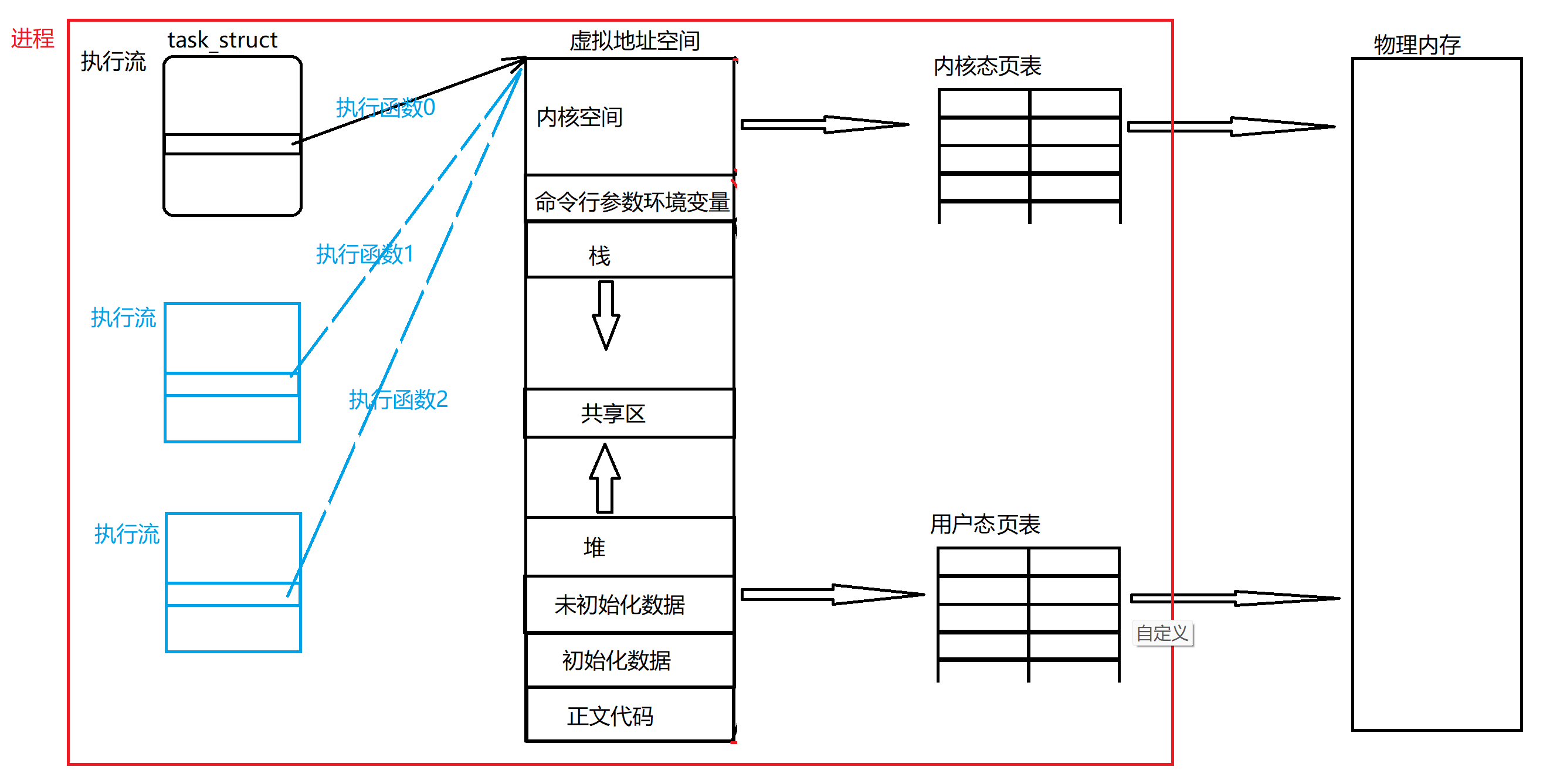
- 线程PCB是拷贝的进程PCB
- 线程的PCB执行的是代码段中的某个函数区域,也就相当于进程内部的一个执行流,粒度也就更细
- 谁来区分进程PCB和线程PCB?OS。因为CPU硬件是给人打工的,只有OS给CPU数据,CPU才会去处理
- OS需不需要管理线程呢?需要,先描述再组织!OS管理线程结构:TCB(线程控制块),属于进程PCB。Linux中直接复用PCB结构体,用PCB模拟线程TCB,所以Linux中没有真正意义上的线程,而是进程方案模拟的线程!Linux中的线程叫做Linux轻量级进程
1.3 见一见
#include <iostream>
#include <pthread.h>
#include <unistd.h>void* thread1_run(void* args)
{while(true){printf("thread1: run....!\n");sleep(1);}
}void* thread2_run(void* args)
{while(true){printf("thread2: run....!\n");sleep(1);}
}void* thread3_run(void* args)
{while(true){printf("thread3: run....!\n");sleep(1);}
}int main()
{pthread_t thread1, thread2, thread3; pthread_create(&thread1, NULL, thread1_run, NULL);pthread_create(&thread1, NULL, thread2_run, NULL);pthread_create(&thread1, NULL, thread3_run, NULL);while(true){printf("main thread: run....!\n");sleep(1);}return 0;
}//makefile
thread:thread.ccg++ -o $@ $^ -std=c++11 -lpthread
.PHONY:cleanrm -f thread
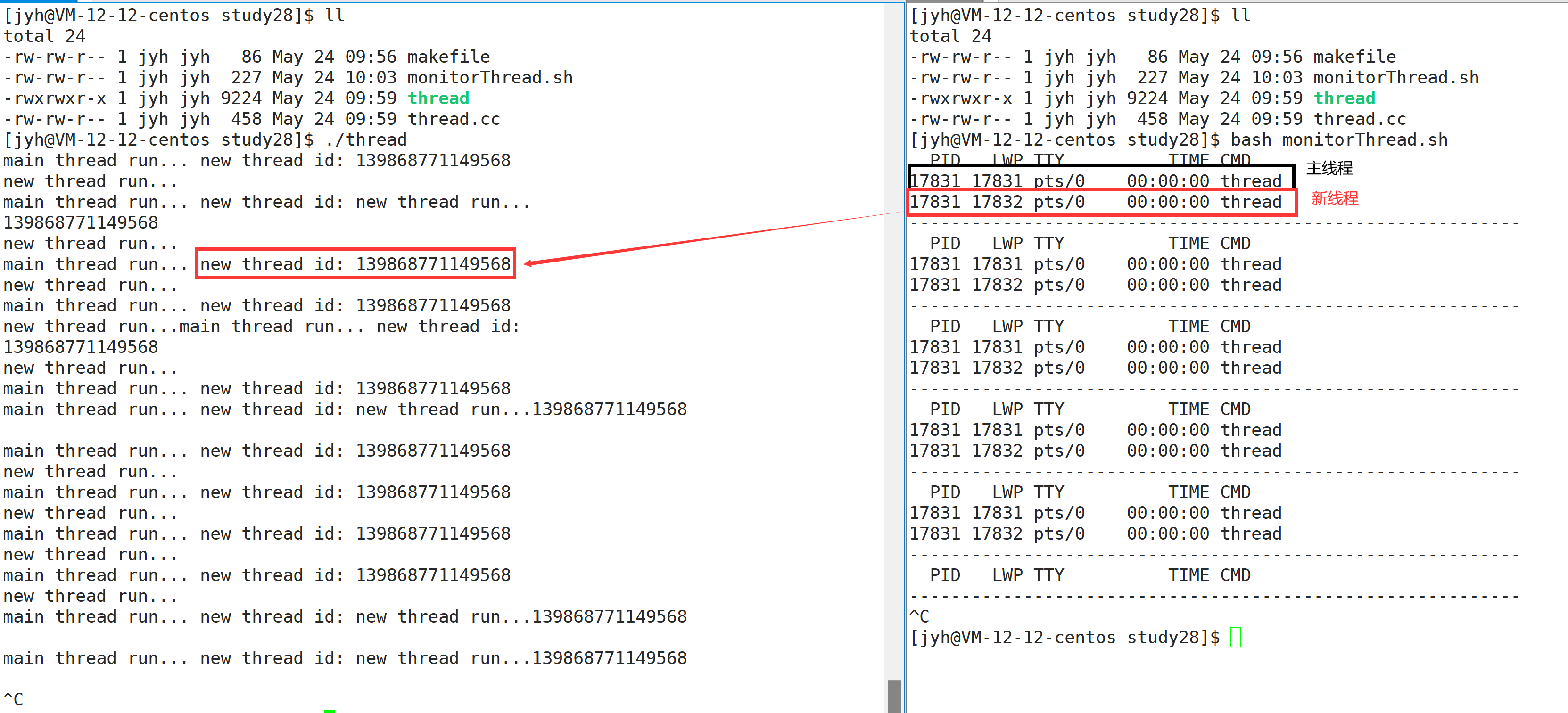
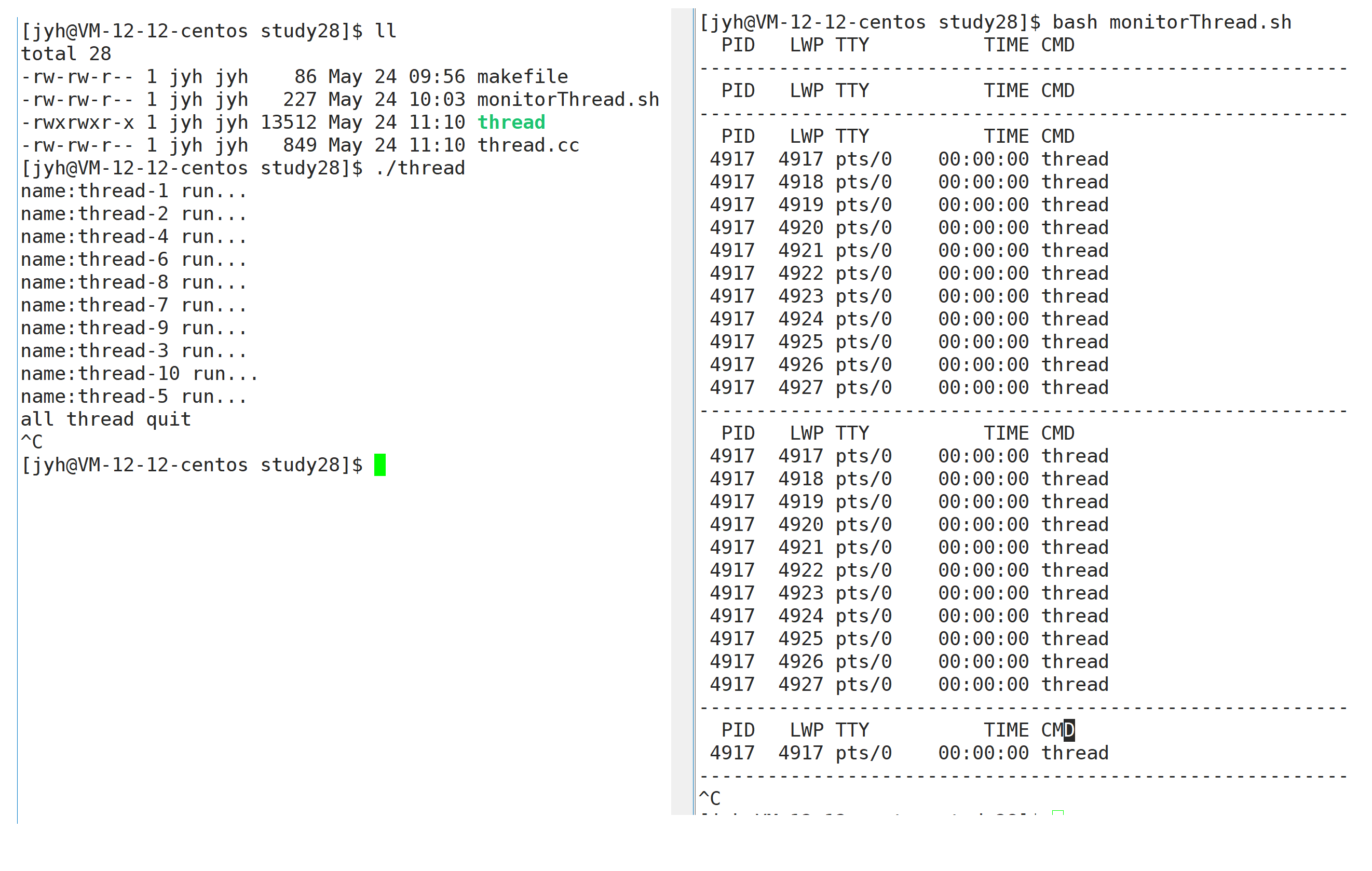
运行现象:
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-3BiXZAWk-1689909435268)(https://typora130.oss-cn-nanjing.aliyuncs.com/QQ截图20230511154828.png)]
上述中我们观察到四个线程的PID都是相同的,但是LWP是不一样的,LWP(lightweight process)也就是线程。
监控线程脚本(monitorThread.sh):
#! /usr/bin/bash # 1) script description
# use to monitor thread while :;
do ps -aL | head -1 && ps -aL | grep thread | grep -v grep; echo "-----------------------------------------------------------"; sleep 1;
done
2. 线程优缺点
优点
- 创建一个新线程的代价要比创建一个新进程小得多
- 与进程之间的切换相比,线程之间的切换需要操作系统做的工作要少很多
- 线程占用的资源要比进程少很多
- 在等待慢速I/O操作结束的同时,程序可执行其他的计算任务
- 计算密集型应用(算法相关的消耗CPU资源的),为了能在多处理器系统上运行,将计算分解到多个线程中实现
- I/O密集型应用,为了提高性能,将I/O操作重叠。线程可以同时等待不同的I/O操作
缺点
- 性能损失。一个很少被外部事件阻塞的计算密集型线程往往无法与共它线程共享同一个处理器。如果计算密集型线程的数量比可用的处理器多,那么可能会有较大的性能损失,这里的性能损失指的是增加了额外的同步和调度开销,而可用的资源不变。
- 健壮性降低。多线程程序中,任 何一个线程崩溃最后都会导致进程崩溃
- 缺乏访问控制。
3. 线程使用
3.1 认识线程库
操作系统中没有真正意义的线程,只有进程模拟的线程,所以,Linux操作系统不会提供相关操作线程的系统调用,只会提供相关线程的接口,那么我们就需要用一个线程库对下来对Linux接口提供封装,对上给用户提供线程操作接口和线程管理,这个库就是pthread库。通过命令ls /lib64/libpthread.so.* -al即可查看pthread库。
3.2 使用
3.2.1 线程创建
| 选项 | 内容 |
|---|---|
| 函数体 | int pthread_create(pthread_t *thread, const pthread_attr_t *attr, void *(*start_routine) (void *), void *arg); |
| 参数说明 | thread:线程id(pthread_t类型就是unsigned long int类型),start_routine:执行函数地址,arg:start_routine执行函数唯一参数,attr:线程属性结构体指针,为NULL时默认创建线程属性 |
| 返回值 | 成功返回0,失败返回相应的错误码 |
#include <iostream>
#include <pthread.h>
#include <unistd.h>
using namespace std;void* running(void* args)
{while(true){std::cout << "new thread run..." << std::endl;sleep(1);}return nullptr;
}int main()
{pthread_t p;pthread_create(&p, nullptr, running, nullptr);while(true){std::cout << "main thread run... new thread id: " << p << std::endl;sleep(1);}return 0;
}
运行结果
请问:这里的打印的线程id和LWP(lightweight process)的id有什么区别呢?pthread_t就是一个包含线程属性的地址数据,LWP就是内核中轻量级进程的ID(类似于进程ID)
#include <iostream>
#include <pthread.h>
#include <cstdio>
#include <unistd.h>
using namespace std;#define NUM 10void* running(void* args)
{char* name = (char*)args;while(true){printf("name:%s run...\n", name);sleep(1);}return nullptr;
}int main()
{pthread_t ptable[NUM];for(size_t i = 0; i < NUM; ++i){char name[64];snprintf(name, 64, "thread-%d", i + 1);printf("main:%p\n", name);pthread_create(ptable+i, nullptr, running, name); }while(true){std::cout << "main thread run... new thread id: " << std::endl;sleep(1);}return 0;
}
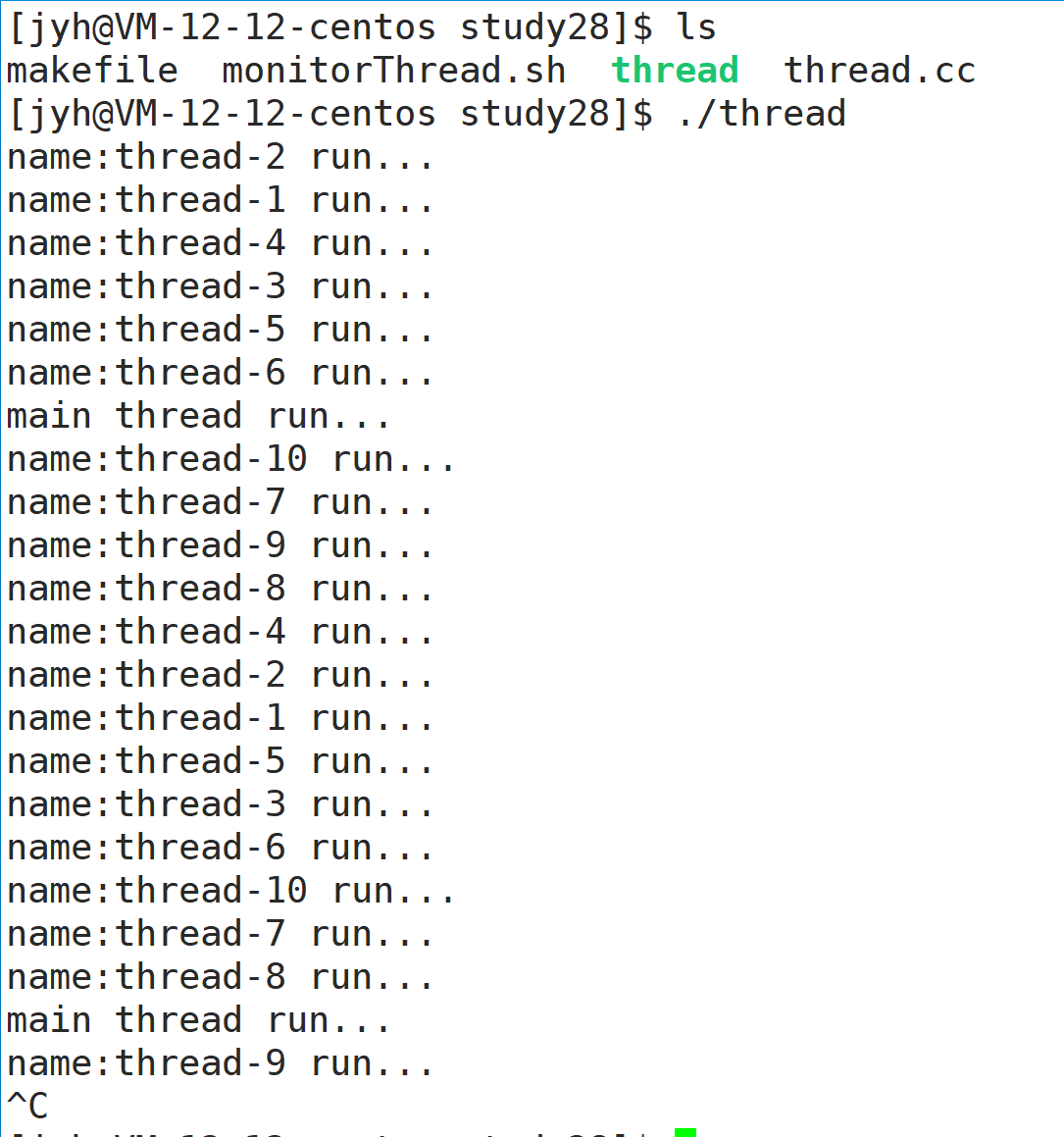
运行结果

请问:为什么后面的打印结果都是一样的,而不是从1-10线程编号依次打印呢?
因为这里的main函数体中的name这个指针是在栈上的,同一进程下创建的线程都是轻量级进程都是同一块的虚拟内存空间,所以访问的是用一块栈空间,这里的char name[64]的地址是不变的,每次snprintf写入数据都是对上次的覆盖,所以先前打印的是按照顺序来的,但是后面最终char name[64]被覆盖成thread-10后就不会改变了,所以最终都是打印一样的。这里我们说访问的是一样的虚拟内存空间,那么我们开辟到堆上来试试:
#include <iostream>
#include <pthread.h>
#include <cstdio>
#include <unistd.h>
using namespace std;#define NUM 10void* running(void* args)
{char* name = (char*)args;while(true){printf("name:%s run...\n", name);sleep(1);}delete[] name;return nullptr;
}int main()
{pthread_t ptable[NUM];for(size_t i = 0; i < NUM; ++i){char* name = new char[64];snprintf(name, 64, "thread-%d", i + 1);pthread_create(ptable+i, nullptr, running, name); }while(true){printf("main thread run...\n");sleep(1);}return 0;
}
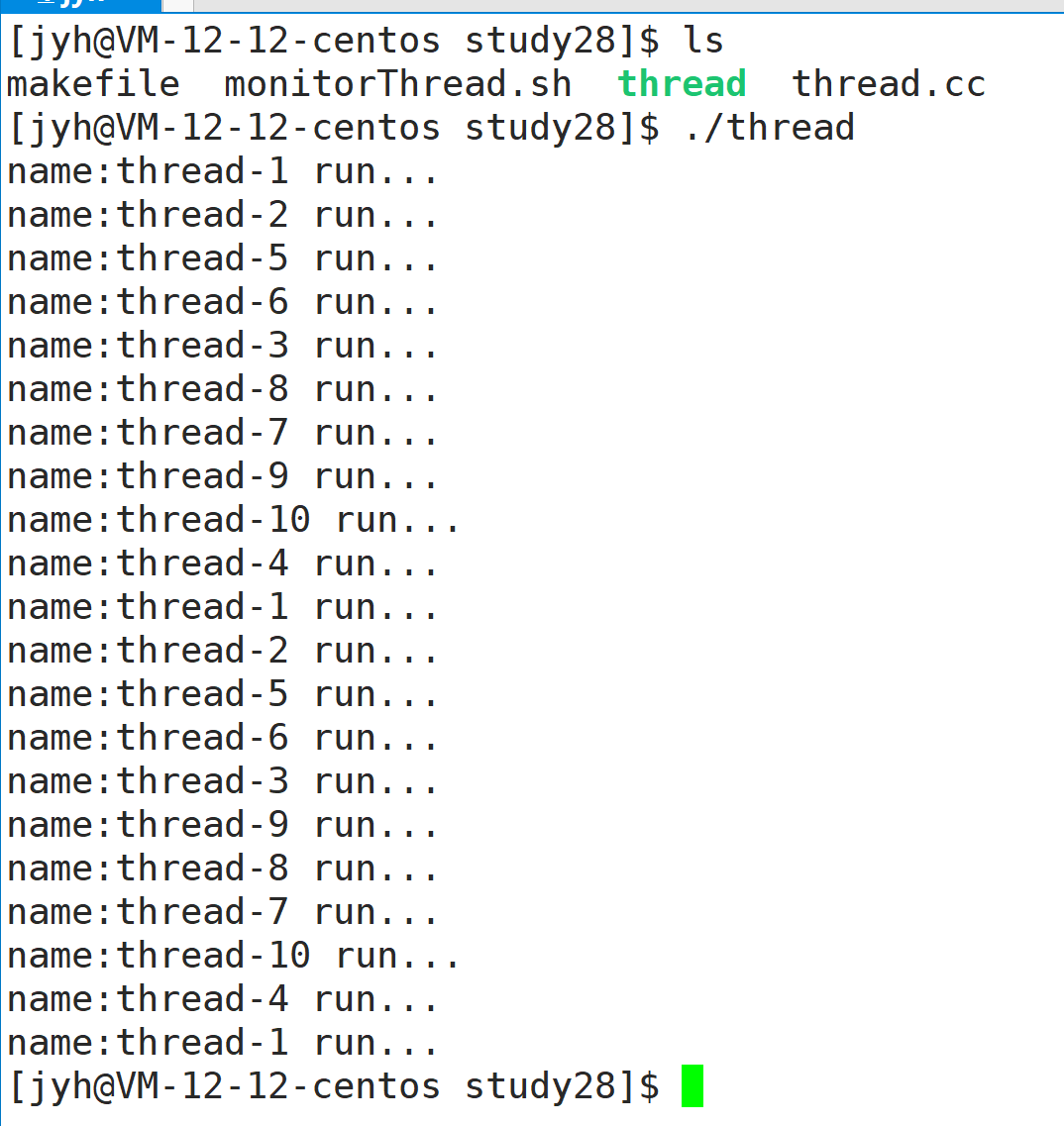
运行结果
为什么这样就可以得到不同线程编号呢?
原因是每次new出来的堆空间都是不同的,都是新的空间,所以每次传给新线程的堆空间都是不同的,snprintf函数写入内容也是不同的,至此打印不同的线程编号.补充问题:为什么这里线程编号依次从小到大排序的呢,原因就是CPU调度器调度谁是不一定的.
#include <iostream>
#include <pthread.h>
#include <cstdio>
#include <unistd.h>
using namespace std;#define NUM 10void* running(void* args)
{char* name = (char*)args;while(true){printf("name:%s run...\n", name);sleep(1);}delete[] name;return nullptr;
}int main()
{pthread_t ptable[NUM];for(size_t i = 0; i < NUM; ++i){char* name = new char[64];snprintf(name, 64, "thread-%d", i + 1);pthread_create(ptable+i, nullptr, running, name); }sleep(2);return 0;
}
运行结果
3.2.2 线程等待
现象:程序运行两秒,主线程退出,所有线程退出,这里导致的就类似于僵尸进程,这里并没有僵尸线程概念,那么这里怎么来等待和回收线程呢?
| 选项 | 内容 |
|---|---|
| 函数体 | int pthread_join(pthread_t thread, void **retval); |
| 参数说明 | thread:线程id,retval:执行函数返回值 |
| 函数功能 | 等待线程 |
| 返回值 | 成功返回0,失败返回对应的错误码 |
#include <iostream>
#include <pthread.h>
#include <cstdio>
#include <unistd.h>
using namespace std;#define NUM 10void* running(void* args) /*可重入函数*/
{char* name = (char*)args;while(true){printf("name:%s run...\n", name);sleep(2);break; /*线程退出*/}delete[] name;return nullptr;
}int main()
{pthread_t ptable[NUM];for(size_t i = 0; i < NUM; ++i) /*线程创建*/{char* name = new char[64];snprintf(name, 64, "thread-%d", i + 1);pthread_create(ptable+i, nullptr, running, name); }for(size_t i = 0; i < NUM; ++i) /*线程等待*/{int ret = pthread_join(ptable[i], nullptr);if(ret != 0) cout << "pthread_join err" << endl;}cout << "all thread quit" << endl;sleep(2);return 0;
}
运行结果
3.2.3 线程退出
| 选项 | 内容 |
|---|---|
| 函数体 | void pthread_exit(void *retval); |
| 参数说明 | retval:执行函数返回值 |
| 函数功能 | 终止线程 |
#include <iostream>
#include <pthread.h>
#include <cstdio>
#include <unistd.h>
#include <string>
using namespace std;#define NUM 10enum {NO, OK};struct threadData /*线程等待返回线程数据*/
{ string _name;int _id;int _retStatus; /*返回状态*/threadData(const string& name, const int& id):_name(name),_id(id),_retStatus(OK){}
};void* running(void* args) /*可重入函数*/
{threadData* td = static_cast<threadData*>(args);while(true){printf("name:%s, id:%d\n", td->_name.c_str(), td->_id);sleep(2);break;}pthread_exit(td); /*终止线程*/
}int main()
{pthread_t ptable[NUM];for(size_t i = 0; i < NUM; ++i) /*线程创建*/{char name[64];snprintf(name, 64, "thread-%d", i + 1);threadData* td = new threadData(name, i+1); /*创建线程信息*/pthread_create(ptable+i, nullptr, running, td); }void* retval = nullptr;for(size_t i = 0; i < NUM; ++i) /*线程等待*/{int ret = pthread_join(ptable[i], &retval);if(ret != 0) cout << "pthread_join err" << endl;threadData* td = static_cast<threadData*>(retval);cout << "thread exit status:" << td->_retStatus << endl;}cout << "all thread quit" << endl;return 0;
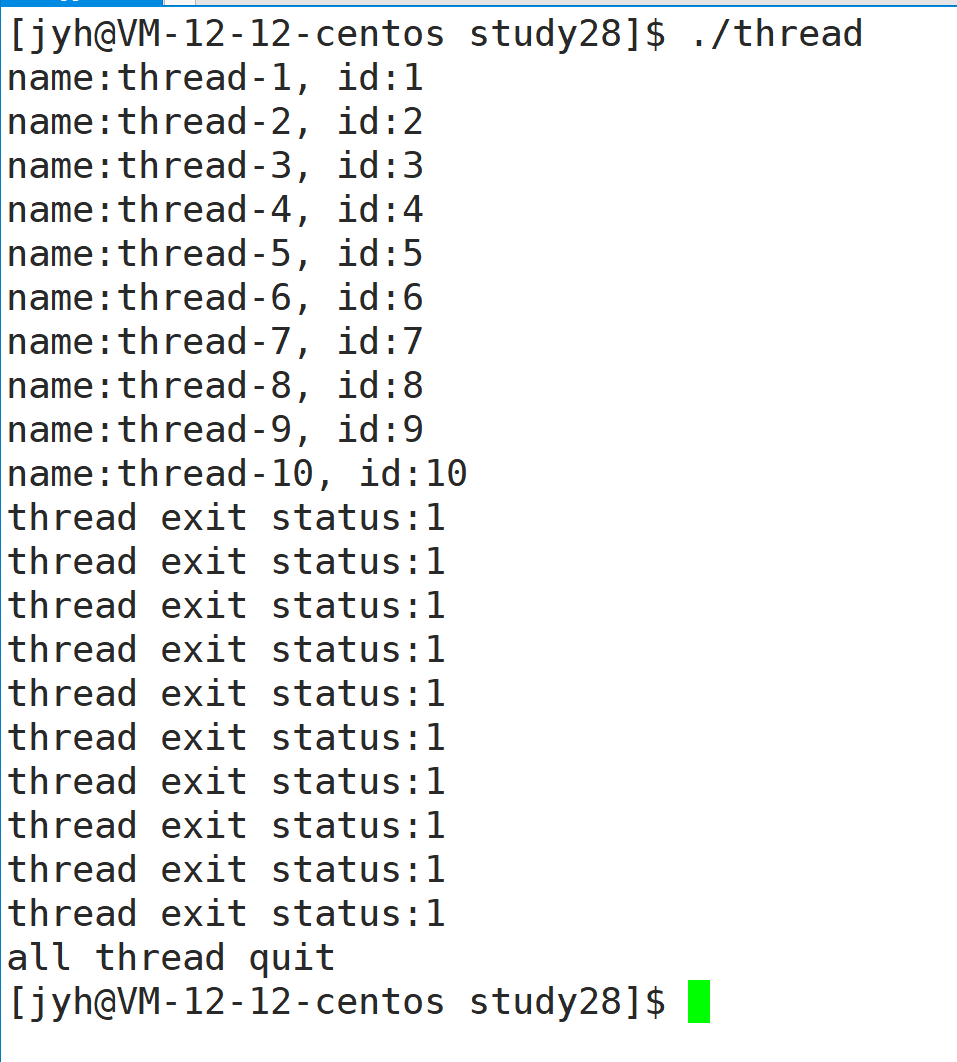
}/*为什么没有所谓的异常退出呢?*/
/*线程异常,进程会退出,进程是承担分配系统资源的基本实体,进程结束对应的资源全部释放*/
运行结果
3.2.4 线程取消
| 选项 | 内容 |
|---|---|
| 函数体 | int pthread_cancel(pthread_t thread); |
| 函数功能 | 取消线程 |
| 返回值 | 成功返回0,失败对应的错误码 |
#include <iostream>
#include <pthread.h>
#include <cstdio>
#include <unistd.h>
#include <string>
using namespace std;/*线程取消*/void* running(void* args)
{char* name = (char*)args;int cnt = 5;while(cnt){cout << name << "is running .. " << cnt-- << endl;sleep(1);}pthread_exit((void*)10);
}int main()
{pthread_t p;pthread_create(&p, nullptr, running, (void*)"thread-1"); /*线程创建*/sleep(3);pthread_cancel(p); /*取消线程*/void* retVal = nullptr;pthread_join(p, &retVal); /*线程等待*/cout << "thread-1 exit:" << (int64_t)retVal << endl;return 0;
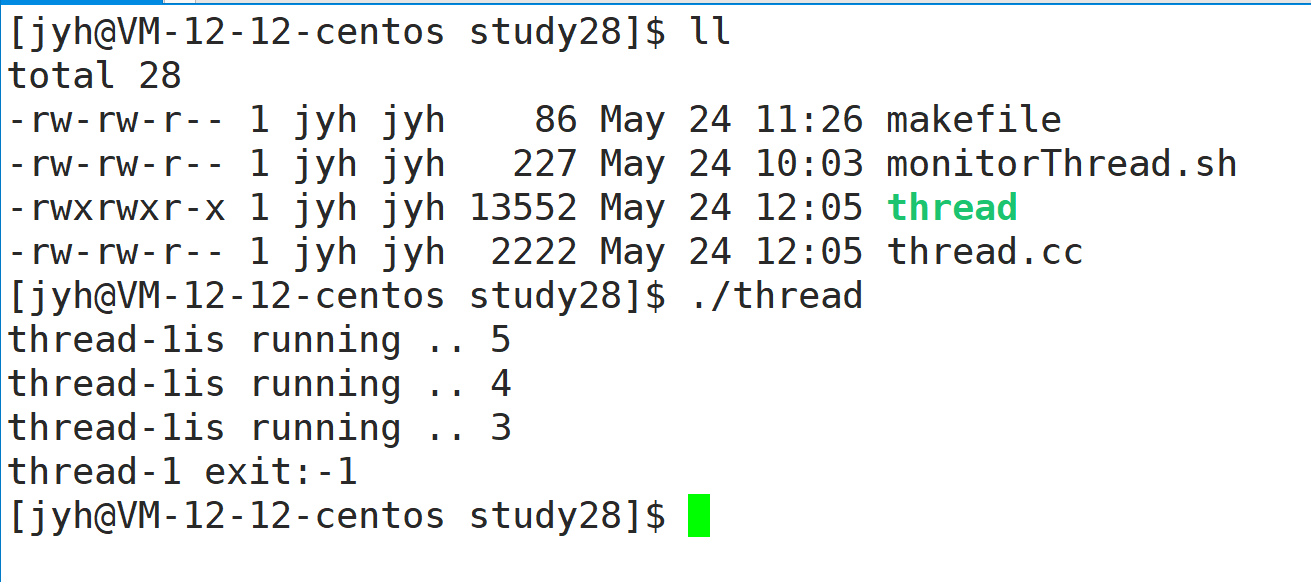
}
运行结果
3.2.5 获取线程id
| 选项 | 内容 |
|---|---|
| 函数体 | pthread_t pthread_self(void); |
| 函数功能 | 获取线程id |
3.2.6 线程分离
| 选项 | 内容 |
|---|---|
| 函数体 | int pthread_detach(pthread_t thread); |
| 函数功能 | 分离线程 |
| 返回值 | 成功返回0,失败返回对应的错误码 |
#include <iostream>
#include <pthread.h>
#include <cstring>
#include <string>
#include <unistd.h>void* running(void* args)
{std::string name = static_cast<const char*>(args);int cnt = 5;while(cnt){std::cout << name << ":" << cnt-- << std::endl;sleep(1);}return nullptr;
}int main()
{pthread_t p;pthread_create(&p, nullptr, running, (void*)"thread-1");pthread_detach(p);int ret = pthread_join(p, nullptr);if(0 != ret) std::cerr << "error:" << ret << ":" << strerror(ret) << std::endl;return 0;
}
//输出结果:Invaild argument
分离的一个线程不能再等待
#include <iostream>
#include <pthread.h>
#include <cstring>
#include <string>
#include <unistd.h>void* running(void* args)
{pthread_detach(pthread_self());std::string name = static_cast<const char*>(args);int cnt = 5;while(cnt){std::cout << name << ":" << cnt-- << std::endl;sleep(1);}return nullptr;
}int main()
{pthread_t p;pthread_create(&p, nullptr, running, (void*)"thread-1");sleep(1); /*不加上这段代码:正常执行,加上这段代码:报错进程自动终止*/int ret = pthread_join(p, nullptr);if(0 != ret) std::cerr << "error:" << ret << ":" << strerror(ret) << std::endl;return 0;
}
加和不加上面代码中的sleep(1)会出现不同情况的原因:加上sleep(1),可能主线程优先调度,那么分离不能等待就会导致报错。(本质还是调度优先级问题)
3.3 理解线程库
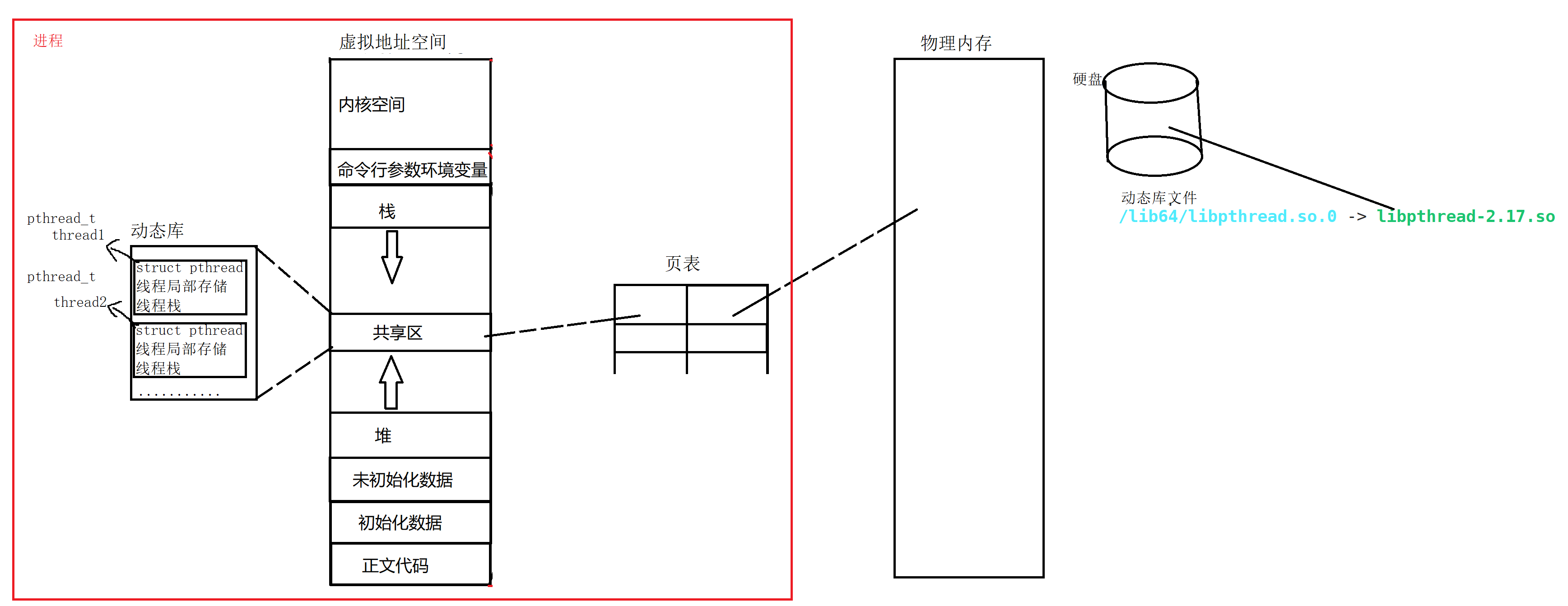
线程库文件是放在硬盘上面的,程序运行变成进程,此时创建线程后,有对应的轻量级进程,因为操作系统没有提供相关的系统调用接口,那么就需要实现一个用来提供给用户各种线程操作接口和管理线程的库,这里叫做pthread库,动态库是放在虚拟地址空间的共享区的,此时动态库就别包括在进程中,那么在内核中就可以获取相应的有关数据,就可以对线程做管理并且提供相关的操作接口。这里的pthread_t其实就是线程id,它的本质是一个标志线程相关的属性的地址数据,只不过我们打印看到的是以十进制方式打印的。所有进程都有自己独立的栈结构,主线程是系统栈(虚拟内存空间中的栈),新线程是库中提供的栈(库中自我独立的栈)
#include <iostream>
#include <pthread.h>
#include <cstring>
#include <string>
#include <unistd.h>std::string sixteenPrint(pthread_t id)
{char buf[64];snprintf(buf, 64, "0x%x", id);return buf;
}void* running(void* args)
{std::string name = static_cast<const char*>(args);int cnt = 5;while(cnt){std::cout << name << ":" << cnt-- << " : " << sixteenPrint(pthread_self()) << std::endl;sleep(1);}return nullptr;
}int main()
{pthread_t p;pthread_create(&p, nullptr, running, (void*)"thread-1");while(true){std::cout << "main thread: " << sixteenPrint(pthread_self())<< " new thread: " << sixteenPrint(p) << std::endl;sleep(1);}int ret = pthread_join(p, nullptr);if(0 != ret) std::cerr << "error:" << ret << ":" << strerror(ret) << std::endl;return 0;
}
运行结果
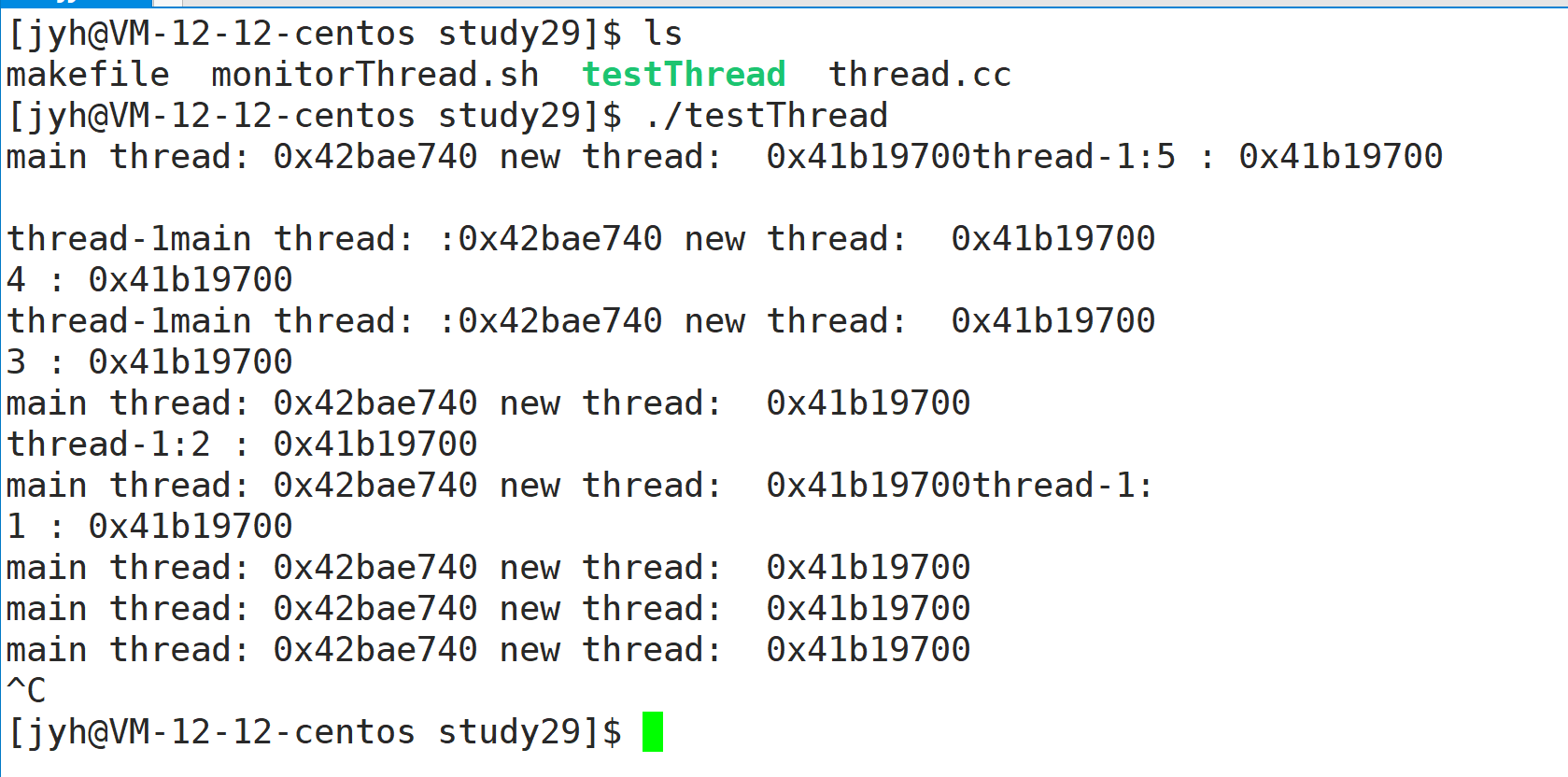
任何语言在Linux下运行,底层用的都是pthread库
3.4 证明线程栈
#include <iostream>
#include <pthread.h>
#include <cstring>
#include <string>
#include <unistd.h>std::string sixteenPrint(pthread_t id)
{char buf[64];snprintf(buf, 64, "0x%x", id);return buf;
}void* running(void* args)
{std::string name = static_cast<const char*>(args);int cnt = 5; /*每个线程都有自己的cnt*/while(cnt){printf("name:%s, cnt:%d, &cnt:%p, newThreadID:%p\n", name.c_str(), cnt--, &cnt, sixteenPrint(pthread_self()).c_str());sleep(1);}return nullptr;
}int main()
{pthread_t p1, p2, p3;pthread_create(&p1, nullptr, running, (void*)"thread-1");pthread_create(&p2, nullptr, running, (void*)"thread-2");pthread_create(&p3, nullptr, running, (void*)"thread-3");pthread_join(p1, nullptr);pthread_join(p2, nullptr);pthread_join(p3, nullptr);return 0;
}
运行结果
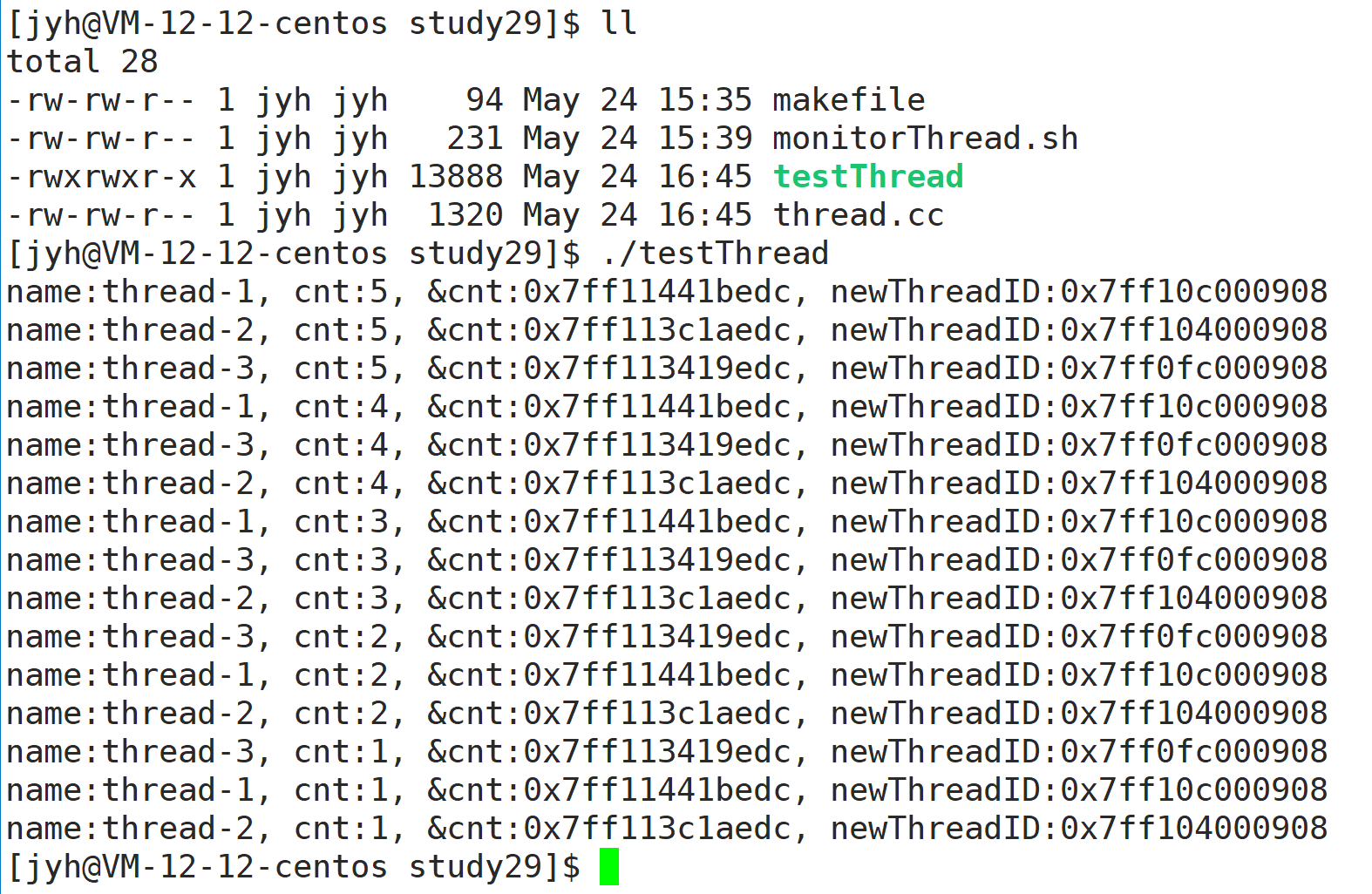
此时我们每个线程内部都有自己独立的栈结构,所以cnt的地址是不同的。不是进程地址空间中只有一个栈吗?主线程用的是进程系统栈,新线程用的是库中提供的栈。
3.5 线程局部存储
#include <iostream>
#include <pthread.h>
#include <cstring>
#include <string>
#include <unistd.h>int g_val = 10;std::string sixteenPrint(pthread_t id)
{char buf[64];snprintf(buf, 64, "0x%x", id);return buf;
}void* running(void* args)
{std::string name = static_cast<const char*>(args);while(true){printf("g_val:%d, &g_val:%p\n", g_val++, &g_val);sleep(1);}return nullptr;
}int main()
{pthread_t p1, p2, p3;pthread_create(&p1, nullptr, running, (void*)"thread-1");pthread_create(&p2, nullptr, running, (void*)"thread-2");pthread_create(&p3, nullptr, running, (void*)"thread-3");pthread_join(p1, nullptr);pthread_join(p2, nullptr);pthread_join(p3, nullptr);return 0;
}
运行结果
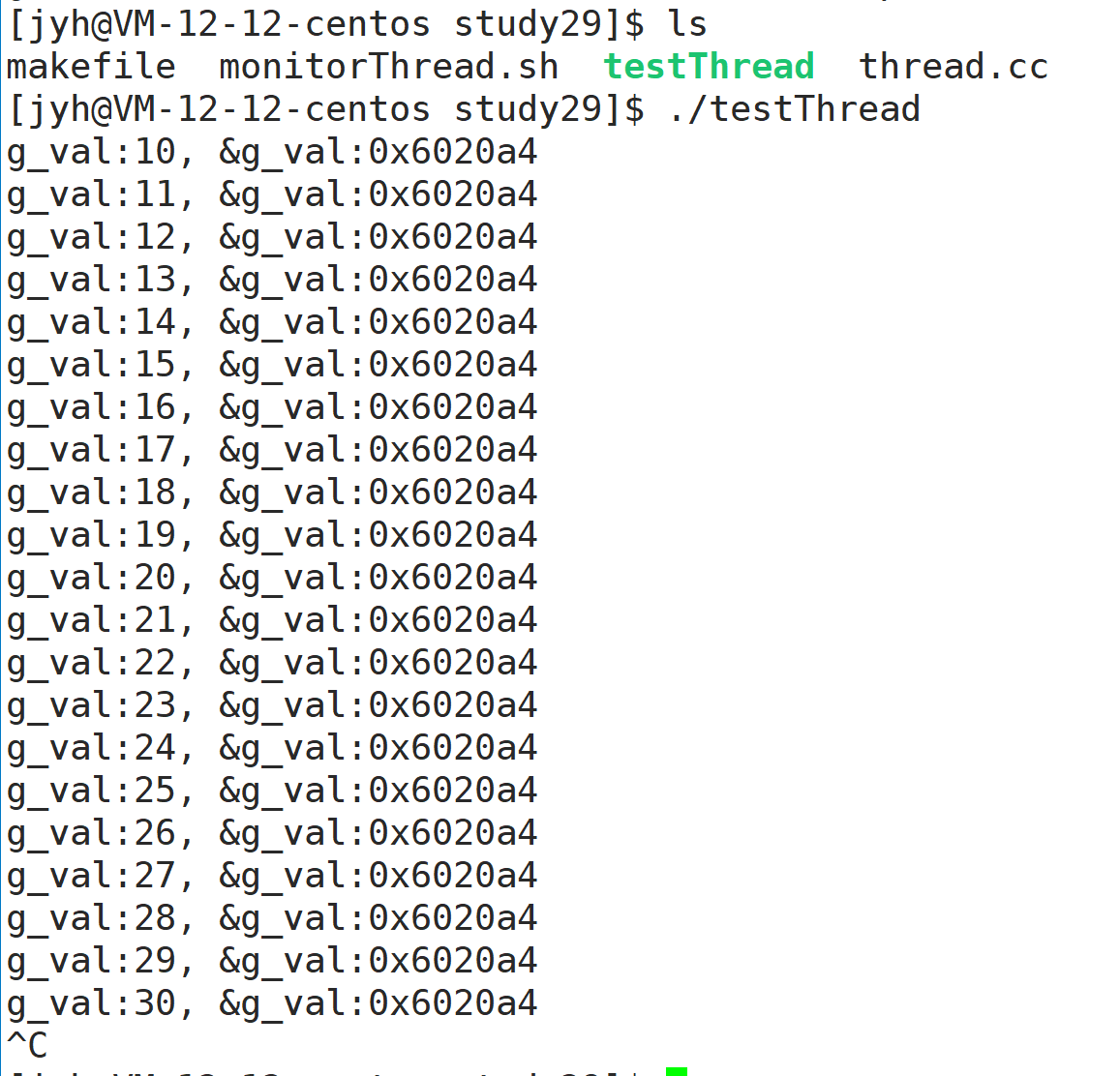
解释:全局变量是在虚拟内存空间的初始化数据段的, 所以地址是不变的,对g_val++线程得到的值发生变化是因为写时拷贝。那么这里怎么样不让所有线程共享呢?定义g_val前加上__thread编译选项:
#include <iostream>
#include <pthread.h>
#include <cstring>
#include <string>
#include <unistd.h>__thread int g_val = 10;std::string sixteenPrint(pthread_t id)
{char buf[64];snprintf(buf, 64, "0x%x", id);return buf;
}void* running(void* args)
{std::string name = static_cast<const char*>(args);while(true){printf("g_val:%d, &g_val:%p\n", g_val++, &g_val);sleep(1);}return nullptr;
}int main()
{pthread_t p1, p2, p3;pthread_create(&p1, nullptr, running, (void*)"thread-1");pthread_create(&p2, nullptr, running, (void*)"thread-2");pthread_create(&p3, nullptr, running, (void*)"thread-3");pthread_join(p1, nullptr);pthread_join(p2, nullptr);pthread_join(p3, nullptr);return 0;
}
运行结果
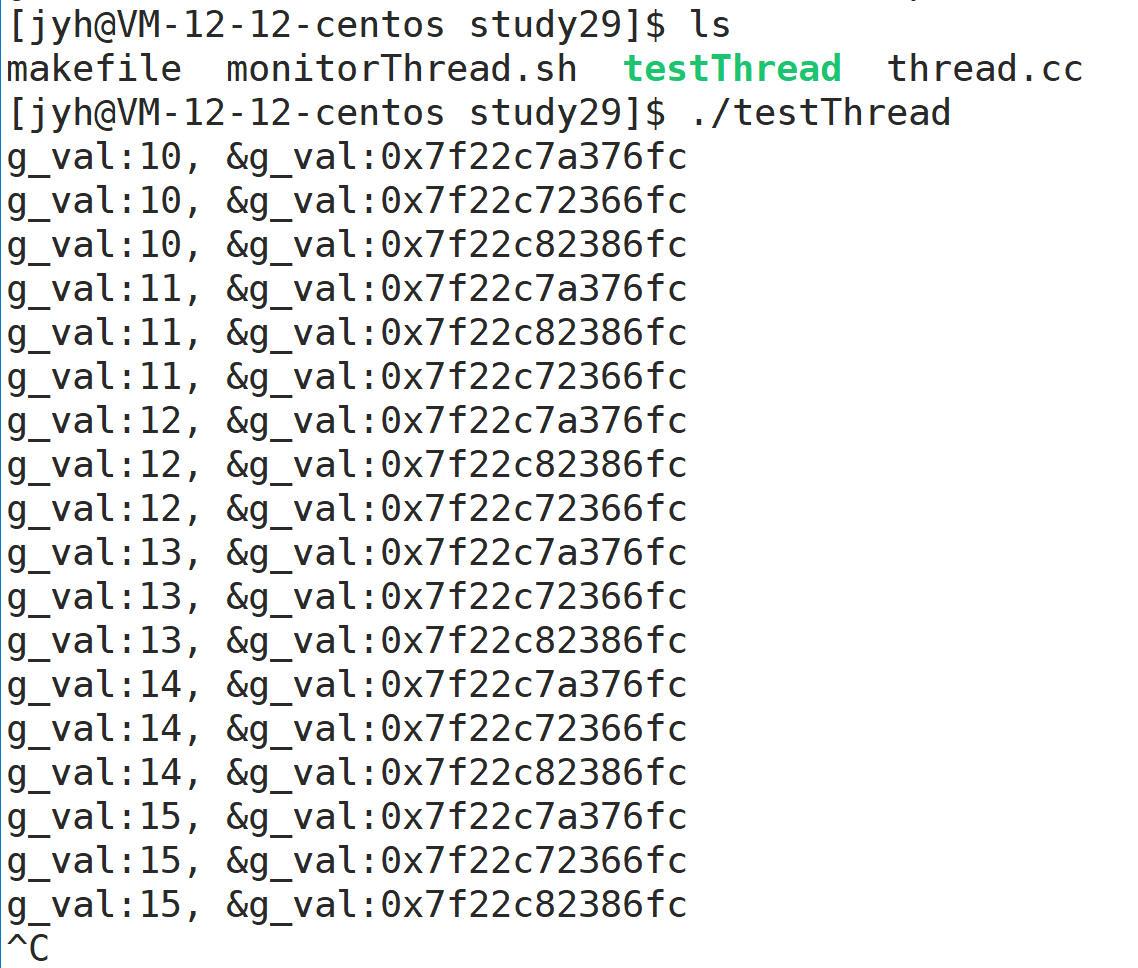
g_val的地址不一样,每个线程各自有一份g_val变量。这就是线程局部存储。
4. 线程互斥
线程中大部分资源都是直接或间接共享的,这就会导致多线程并发访问的问题,为了解决并发访问资源问题,线程就有了互斥策略。
4.1 相关概念
- 临界资源:多线程执行流共享的资源就叫做临界资源
- 临界区:每个线程内部,访问临界资源的代码,就叫做临界区,不访问临界资源的区域就叫做非临界区
- 互斥:任何时刻,互斥保证有且只有一个执行流进入临界区,访问临界资源,通常对临界资源起保护作用
- 原子性:不会被任何调度机制打断的操作,该操作只有两态,要么完成,要么未完成
4.2 互斥场景
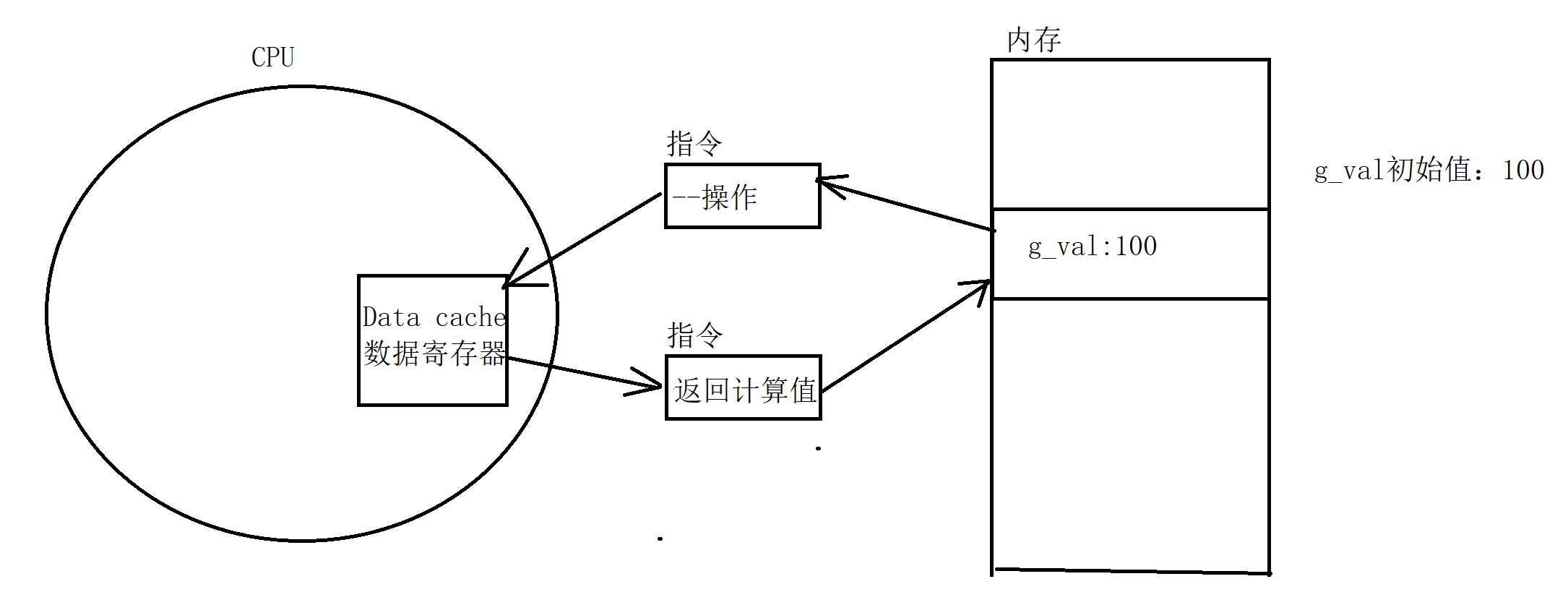
threadA:while(90){g_val–}
threadB:while(10){g_val–}先threadB运行执行2次后,100->98,threadA运行,发生线程上下文切换threadA运行90次后,100->10,threadB运行,发生线程上下文切换,此时Data cache中存放的是98,返回计算值后内存中的g_val变为98,原本threadA执行完后g_val变为10,但是threadB一执行,g_val变为了98,最终变为90
4.3 代码演示(模拟抢票)
#include <iostream>
#include <pthread.h>
#include <unistd.h>
#include <string>int tickets = 10;void *running(void *name)
{std::string thread_name = static_cast<const char *>(name);while (true){if (tickets > 0){usleep(1000); /*模拟抢票花费时间*/printf("thread_name:%s, tickets:%d\n",thread_name.c_str(), tickets--);}else{break;}}return nullptr;
}int main()
{pthread_t thread[4]; // 4个线程int N = sizeof(thread) / sizeof(thread[0]);for (int i = 0; i < N; ++i) /*创建线程*/{char *name = new char[64];snprintf(name, 64, "thread-%d", i + 1);pthread_create(thread + i, nullptr, running, name);}for (int i = 0; i < N; ++i) /*等待回收线程*/{pthread_join(thread[i], nullptr);}return 0;
}
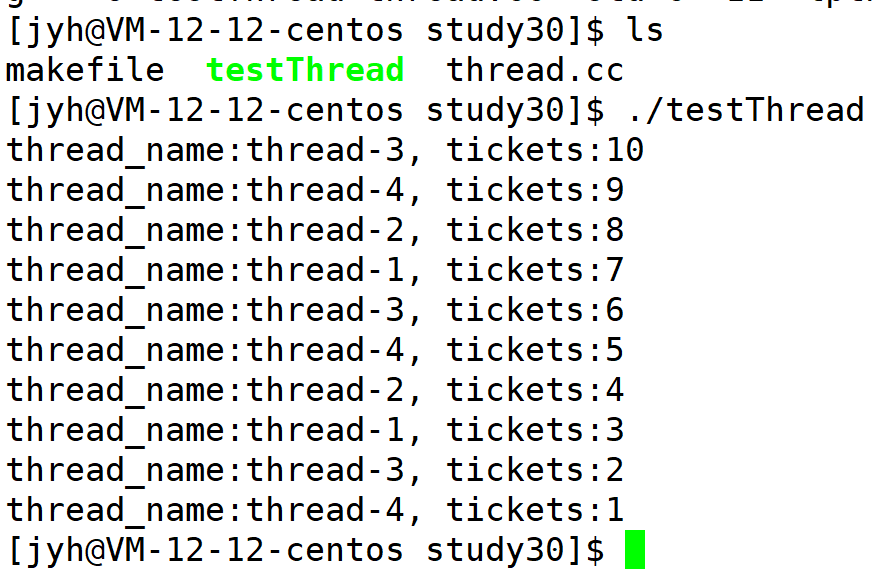
运行结果
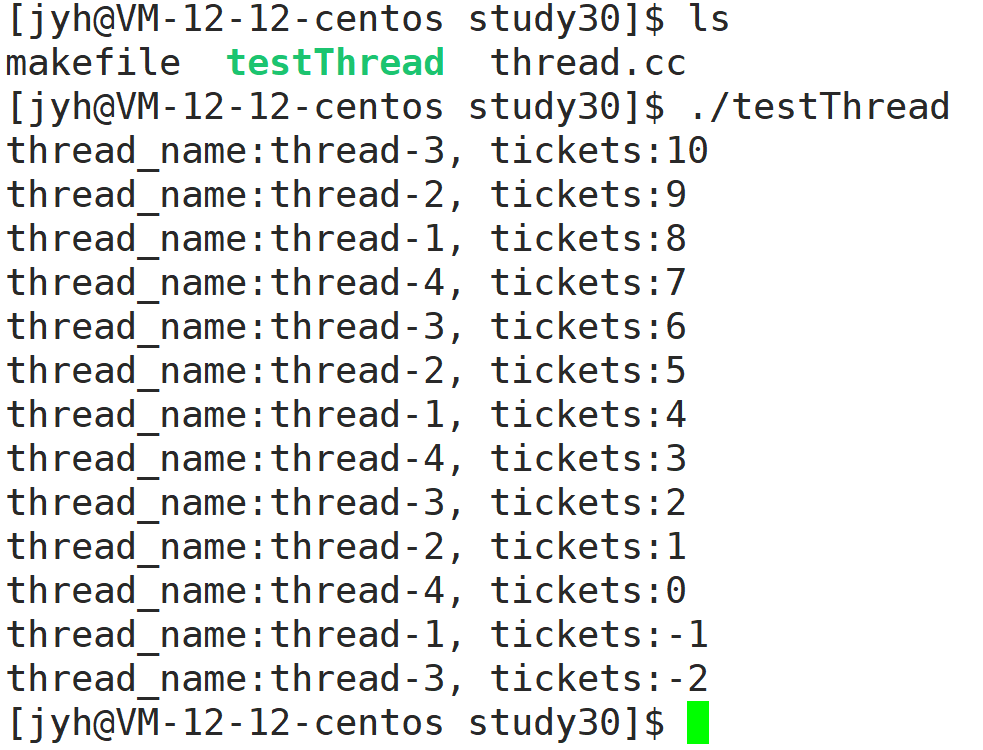
票数能抢到负数吗?这里就有问题,这里–操作并没有对资源做保护,也就是上述互斥场景中的一样,是非原子性的,线程执行会被任何调度机制打断。为了解决原子性问题,这里就需要加锁保护共享资源。
认识锁接口
| 选项 | 内容 |
|---|---|
| 初始化 | int pthread_mutex_destroy(pthread_mutex_t *mutex); |
| 销毁 | int pthread_mutex_init(pthread_mutex_t *restrict mutex, const pthread_mutexattr_t *restrict attr); |
| 加锁 | int pthread_mutex_lock(pthread_mutex_t *mutex); |
| 解锁 | int pthread_mutex_unlock(pthread_mutex_t *mutex); |
//加锁保护资源
#include <iostream>
#include <pthread.h>
#include <unistd.h>
#include <string>int tickets = 10; //票数
pthread_mutex_t mutex; //锁void *running(void *name)
{std::string thread_name = static_cast<const char *>(name);while (true){pthread_mutex_lock(&mutex); //加锁;成功:执行临界区代码,失败:阻塞当前执行流if (tickets > 0){usleep(1000); /*模拟抢票花费时间*/printf("thread_name:%s, tickets:%d\n", \thread_name.c_str(), tickets--);pthread_mutex_unlock(&mutex); //解锁}else{pthread_mutex_unlock(&mutex); //解锁break;}//TODO:完成后续操作usleep(100);}return nullptr;
}int main()
{pthread_t thread[4]; // 4个线程pthread_mutex_init(&mutex, nullptr); //初始化锁int N = sizeof(thread) / sizeof(thread[0]);for (int i = 0; i < N; ++i) /*创建线程*/{char *name = new char[64];snprintf(name, 64, "thread-%d", i + 1);pthread_create(thread + i, nullptr, running, name);}for (int i = 0; i < N; ++i) /*等待回收线程*/{pthread_join(thread[i], nullptr);}pthread_mutex_destroy(&mutex); //销毁锁return 0;
}
运行结果
封装处理
#include <iostream>
#include <pthread.h>
#include <unistd.h>
#include <string>int tickets = 10;struct thread_info
{std::string _name; /*线程名*/pthread_mutex_t* _mutex_ptr; /*锁地址*/thread_info(const std::string& name, pthread_mutex_t* mutex_ptr):_name(name),_mutex_ptr(mutex_ptr){}~thread_info(){}
};void* running(void *args)
{thread_info* info = static_cast<thread_info*>(args);while (true){pthread_mutex_lock(info->_mutex_ptr); //加锁;成功:执行临界区代码,失败:阻塞当前执行流if (tickets > 0){usleep(1000); /*模拟抢票花费时间*/printf("thread_name:%s, tickets:%d\n", \info->_name.c_str(), tickets--);pthread_mutex_unlock(info->_mutex_ptr); //解锁}else{pthread_mutex_unlock(info->_mutex_ptr); //解锁break;}//TODO:完成后续操作usleep(100);}return nullptr;
}int main()
{pthread_t thread[4]; // 4个线程pthread_mutex_t mutex; //锁pthread_mutex_init(&mutex, nullptr); //初始化锁int N = sizeof(thread) / sizeof(thread[0]);for (int i = 0; i < N; ++i) /*创建线程*/{char name[64];snprintf(name, 64, "thread-%d", i + 1);thread_info* info = new thread_info(name, &mutex);pthread_create(thread + i, nullptr, running, info);}for (int i = 0; i < N; ++i) /*等待回收线程*/{pthread_join(thread[i], nullptr);}pthread_mutex_destroy(&mutex); //销毁锁return 0;
}
4.4 细节
- 凡是访问同一个临界资源的线程都要进行加锁保护,而且必须是加的是同一把锁(原因是:所有线程都是访问的同一个临界资源,都是会互相制约)
- 加锁的本质就是对临界区加锁
- 线程访问临界区资源首先需要加锁,所有线程都是看到的同一把锁,这导致锁本身就是公共资源,锁是如何保证自己的安全?加锁和解锁本身就是原子性的
- 临界区可能是一行代码也可能是多行代码,在临界区代码执行时,线程可能被切换吗?可能,临界区代码和普通代码一样,并没有特殊化;那么线程在临界区代码执行时切换会受影响吗?不会有影响,因为此进程把锁拿走了,任何线程切换进来后都无法成功申请到锁!
4.5 锁的实现原理
代码必须要有互斥行为:当代码进入临界区执行时,不允许其他线程进入该临界区。如果多个线程同时要求执行临界区的代码,并且临界区没有线程在执行,那么只能允许一个线程进入该临界区。如果线程不在临界区中执行,那么该线程不能阻止其他线程进入临界区。要做到这三点,本质上就是需要一把锁。Linux上提供的这把锁叫互斥量。、
为了实现互斥锁操作,大多数体系结构都提供了swap或exchange指令,该指令的作用是把寄存器和内存单元的数据相交换,由于只有一条指令,保证了原子性,即使是多处理器平台,访问内存的 总线周期也有先后,一个处理器上的交换指令执行时另一个处理器的交换指令只能等待总线周期。
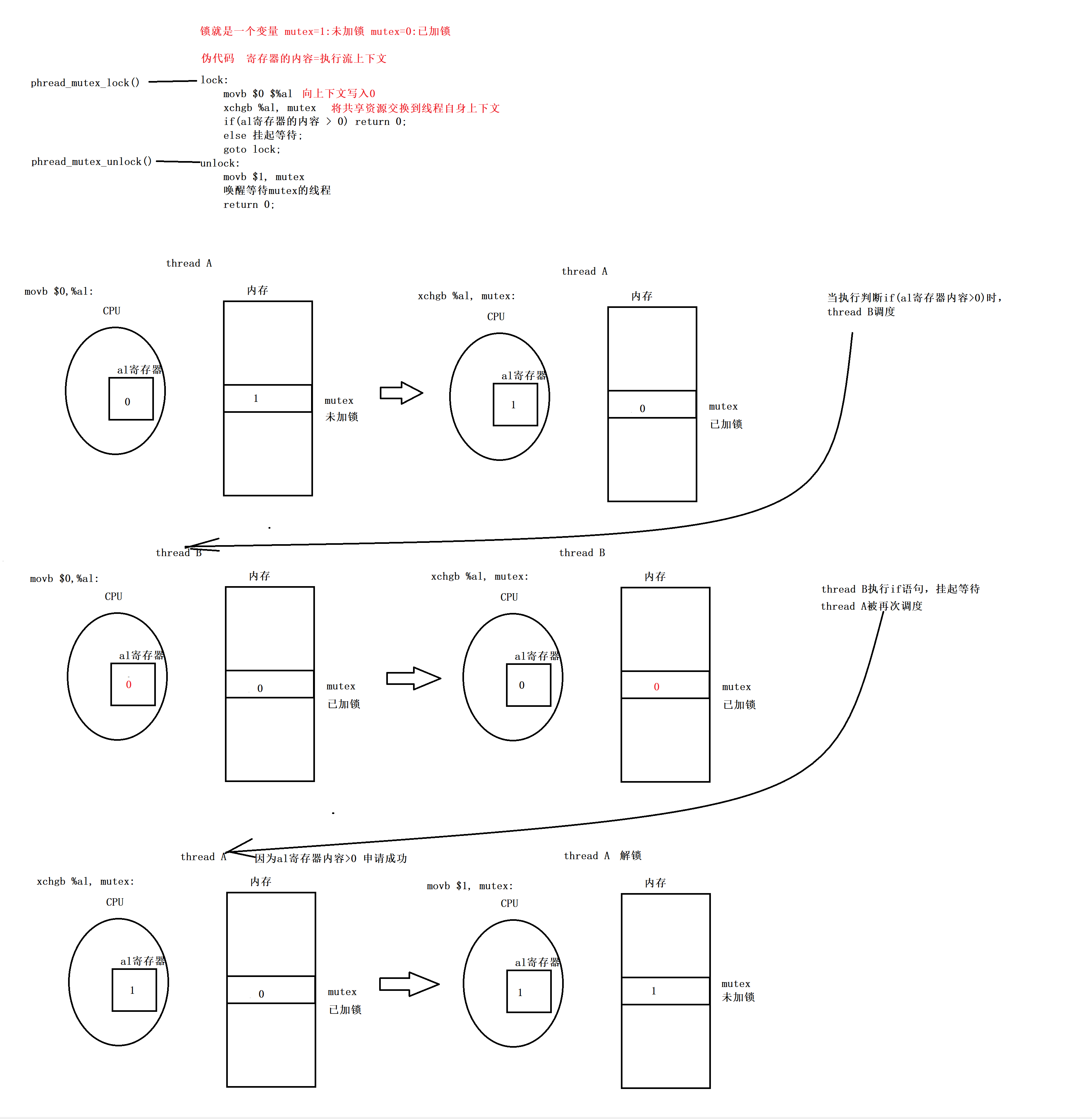
加锁和解锁就是变量数据1在内存和CPU寄存器中的流转。这里的1并不是每个线程都有一个,这个1只有一个,每个线程都是通过swap和exchange方法来得到1,完成对应的加锁和解锁操作。这里的锁对应的就是一条汇编指令,要么执行完成,要么没执行不完成,也就保证了原子性。
4.6 线程封装
thread_library.hpp
#pragma once#include <iostream>
#include <string>
#include <pthread.h>namespace MyThread
{class thread{private:typedef void (*task)(void*);typedef enum {CONSTRUCT, //新建状态RUNNING, //运行状态EXITED //退出状态}status; private:pthread_t _id; //线程idstd::string _name; //线程名task _task; //任务(需被设置)status _status; //状态void* _args; //参数public:thread(int id, task task, void* args):_status(CONSTRUCT),_id(id),_task(task),_args(args){char name[64];snprintf(name, 64, "thread-%d", id);_name = name;}~thread() {}public:const int getStatus() const {return _status;}const std::string& getName() const {return _name;}const pthread_t getId() const {if(_status == RUNNING) return _id;else std::cout << " thread is not running, no id " << std::endl ; return 0;}void operator()() { _task(_args); } //成员函数调用类中的被设置的任务//类的成员函数具有默认参数this// void* routine(void* args) errorstatic void* routine(void* args) //OK{//_task(_args); //err:static成员函数无法直接访问类内成员 解决方式pthread_create传参数直接传thisthread* self_this = static_cast<thread*>(args);(*self_this)(); //对象调用operator()return nullptr;}void run(){int ret = pthread_create(&_id, nullptr, routine, this);if(ret != 0) exit(1);_status = RUNNING;}void join(){int ret = pthread_join(_id, nullptr);if(ret != 0) {std::cerr << "join thread:" << _name << "(error)" << std::endl; return;}_id = 0;_status = EXITED;}}; //!thread} //!MyThread
lock_guard.hpp
#pragma once#include <iostream>
#include <pthread.h>namespace MyThread
{class mutex //对锁封装{private:pthread_mutex_t* _mutex;public:mutex(pthread_mutex_t* mutex):_mutex(mutex){}~mutex() { }public:void lock(){pthread_mutex_lock(_mutex);}void unlock(){pthread_mutex_unlock(_mutex);}}; //!mutex class lockguard //锁保护装置:调用对象,构造加锁,析构解锁{private:mutex _mutex;public:lockguard(pthread_mutex_t* mutex):_mutex(mutex){_mutex.lock();}~lockguard() { _mutex.unlock(); }}; //!lockguard}; //!MyThread
thread_library.cc
#include "thread_library.hpp"
#include "lock_guard.hpp"
#include <unistd.h>//测试封装锁版本
int tickets = 10000;pthread_mutex_t mutex = PTHREAD_MUTEX_INITIALIZER; //全局定义锁void task(void *args)
{std::string message = static_cast<const char*>(args);while (true){{ //临界区MyThread::lockguard lockguard(&mutex); //创建时自动加锁,临时对象出作用域自动解锁if (tickets > 0){usleep(1000); /*模拟抢票花费时间*/std::cout << message << " get a ticket: " << tickets-- << std::endl;}else break;}}
}int main()
{MyThread::thread thread1(1, task, (void*)"hello1");MyThread::thread thread2(2, task, (void*)"hello2");MyThread::thread thread3(3, task, (void*)"hello3");thread1.run();thread2.run();thread3.run();thread1.join();thread2.join();thread3.join();pthread_mutex_destroy(&mutex);return 0;
}//测试无锁版本
// void routine(void* args)
// {
// std::string message = static_cast<const char*>(args);
// int count = 5;
// while(count--)
// {
// std::cout << "new thread: " << message << std::endl;
// sleep(1);
// }
// }// int main()
// {
// MyThread::thread thread1(1, routine, (void*)"hello!");
// std::cout
// << " thread name: " << thread1.getName()
// << " thread id: " << thread1.getId()
// << " thread status: " << thread1.getStatus() << std::endl;
// thread1.run();
// std::cout
// << " thread name: " << thread1.getName()
// << " thread id: " << thread1.getId()
// << " thread status: " << thread1.getStatus() << std::endl;
// thread1.join();
// std::cout
// << " thread name: " << thread1.getName()
// << " thread id: " << thread1.getId()
// << " thread status: " << thread1.getStatus() << std::endl;// MyThread::thread thread2(2, routine, (void*)"hello!");
// std::cout
// << " thread name: " << thread2.getName()
// << " thread id: " << thread2.getId()
// << " thread status: " << thread2.getStatus() << std::endl;
// thread2.run();
// std::cout
// << " thread name: " << thread2.getName()
// << " thread id: " << thread2.getId()
// << " thread status: " << thread2.getStatus() << std::endl;
// thread2.join();
// std::cout
// << " thread name: " << thread2.getName()
// << " thread id: " << thread2.getId()
// << " thread status: " << thread2.getStatus() << std::endl;// return 0;
// }
5. 可重入函数和线程安全
5.1 概念
线程安全:多个线程并发同一段代码时,不会出现不同的结果。常见对全局变量或者静态变量进行操作,并且没有锁保护的情况下,会出现该问题。
可重入函数:同一个函数被不同的执行流调用,当前一个流程还没有执行完,就有其他的执行流再次进入,我们称之为重入。一个函数在重入的情况下,运行结果不会出现任何不同或者任何问题,则该函数被称为可重入函数,否则,是不可重入函数。
5.2 常见线程安全情况
- 每个线程对全局变量或者静态变量只有读取的权限,而没有写入的权限,一般来说这些线程是安全的
- 类或者接口对于线程来说都是原子操作
- 多个线程之间的切换不会导致该接口的执行结果存在二义性
5.3 常见不可重入情况
- 调用了malloc/free函数,因为malloc函数是用全局链表来管理堆的
- 调用了标准I/O库函数,标准I/O库的很多实现都以不可重入的方式使用全局数据结构
- 可重入函数体内使用了静态的数据结构
5.4 常见可重入情况
- 不使用全局变量或静态变量
- 不使用用malloc或者new开辟出的空间
- 不调用不可重入函数
- 不返回静态或全局数据,所有数据都有函数的调用者提供
- 使用本地数据,或者通过制作全局数据的本地拷贝来保护全局数据
5.5 可重入函数和线程安全关系
- 函数是可重入的,那就是线程安全的
- 函数是不可重入的,那就不能由多个线程使用,有可能引发线程安全问题
- 如果一个函数中有全局变量或静态变量,那么这个函数既不是线程安全也不是可重入的
5.6 可重入函数和线程安全的区别
- 线程安全不一定是可重入的,而可重入函数则一定是线程安全的
- 如果将对临界资源的访问加上锁,则这个函数是线程安全的,但如果这个重入函数若锁还未释放则会产生死锁,因此是不可重入的
6. 死锁
死锁是指在一组进程中的各个进程均占有不会释放的资源,但因互相申请被其他进程所站用不会释放的资源而处于的一种永久等待状态。
6.1 四个充分必要条件
- 互斥条件:一个资源每次只能被一个执行流使用
- 请求与保持条件:一个执行流因请求资源而阻塞时,对已获得的资源保持不放
- 循环等待条件:若干执行流之间形成一种头尾相接的循环等待资源的关系
- 不剥夺条件:一个执行流已获得的资源,在末使用完之前,不能强行剥夺
6.2 避免死锁
上述四个充分必要条件只要有一个不满足就是死锁,不满足第一个条件的做法:不加锁;不满足第二个条件的做法:不主动释放锁;不满足第三个条件的做法:不按照顺序申请锁;不满足第四个条件的做法:不控制线程统一释放锁。
7. 线程同步
7.1 概念
饥饿问题的产生:张三是103自习室的钥匙掌管者,他每次去103自习室自习都有这样一个毛病,每次出去上厕所或者买饭什么的,他都把钥匙带在身上,并不把钥匙挂门上防止其他人趁他不在自习室占位子,这让导致后面等待自习的同学就无法拿到钥匙,这就是饥饿问题。发生这种现象,有的同学就去管理员举报张三,管理员最终给了个规则:自习完毕或者出自习室的人都要把钥匙挂在门上给其他等待同学自习,自习完毕的人不能立即申请钥匙并且等待自习的人要排队。这就是同步。同步就是在保证数据安全的前提下,让线程能够按照某种特定的顺序访问临界资源,从而有效避免饥饿问题
7.2 条件变量
条件变量是利用线程间共享的全局变量进行同步的一种机制,主要包括两个动作:一个线程等待“条件变量的条件成立”而挂起;另一个线程使“条件成立”(给出条件成立信号)
7.2.1 条件变量初始化
| 选项 | 内容 |
|---|---|
| 函数体 | int pthread_cond_init(pthread_cond_t *restrict cond, const pthread_condattr_t *restrict attr); |
| 函数功能 | 初始化条件变量 |
| 返回值 | 成功返回0,失败返回错误码 |
7.2.2 条件变量销毁
| 选项 | 内容 |
|---|---|
| 函数体 | int pthread_cond_destroy(pthread_cond_t *cond); |
| 函数功能 | 销毁条件变量 |
| 返回值 | 成功返回0,失败返回错误码 |
7.2.3 条件变量等待
| 选项 | 内容 |
|---|---|
| 函数体 | int pthread_cond_wait(pthread_cond_t *restrict cond, pthread_mutex_t *restrict mutex); |
| 函数功能 | 等待条件变量 |
| 返回值 | 成功返回0,失败返回错误码 |
7.2.4 唤醒等待
| 选项 | 内容 |
|---|---|
| 函数体 | int pthread_cond_signal(pthread_cond_t *cond); //单独唤醒 int pthread_cond_broadcast(pthread_cond_t *cond); //全部唤醒 |
| 函数功能 | 唤醒条件变量 |
| 返回值 | 成功返回0,失败返回错误码 |
7.3 demo
#include <iostream>
#include <pthread.h>
#include <cstdio>
#include <unistd.h>
using namespace std;#define NUM 5//全局初始化
pthread_cond_t condition_variable = PTHREAD_COND_INITIALIZER;
pthread_mutex_t mutex = PTHREAD_MUTEX_INITIALIZER;void* active(void* args)
{string name = static_cast<const char*>(args);while(true){pthread_mutex_lock(&mutex); //加锁pthread_cond_wait(&condition_variable, &mutex); //线程挂起等待(调用时会自动释放锁)cout << name << " active " << endl;pthread_mutex_unlock(&mutex);}
}int main()
{pthread_t threads[NUM]; //NUM个线程for(size_t i = 0; i < NUM; ++i){char* name = new char[32];snprintf(name, 32, "thread-%d", i+1);pthread_create(&threads[i], nullptr, active, name);}sleep(2); //等待2秒后,线程被随机唤醒while(true){cout << "thread waked up" << endl; pthread_cond_signal(&condition_variable);sleep(1);}for(size_t i = 0; i < NUM; ++i){pthread_join(threads[i], nullptr);}return 0;
}
8. 生产者-消费者模型
8.1 概念
提到生产者和消费者就想到了买东西,我们从买东西说起,往往我们需要什么的时候,我们就会去超市购买,我们是消费者,生产者其实就是超市的供货商,那么超市是个什么呢?超市既不是消费者也不是生产者,而是交易场所。供货商可以源源不断的生产,消费者源源不断的购买,超市也就承载了商品大量输入输出的工作,也就提高了效率。生产者生产和消费者消费可以不同时进行,可能生产者看到超市中的商品还有很多也有库存,此时生产者就没有生产这类商品了,但是消费者依旧每天都在购买;还有一种情况就是这类商品没有了,而消费者想买但没有,此时消费者就无法购买而不再购买,此时生产者看到商品没有了也就要加力生产。这也就体现了生产消费可以同时进行(忙闲不均)。计算机中,生产者和消费者都是线程,超市也就是特定的缓冲区,超市内的商品就是数据。超市这个交易场所能被支持消费者消费和生产者生产的前提就是被生产者和消费者可进出。也就是这个特定的缓冲区被所有线程先看到,这个特定的缓冲区才能被使用,那么这个特定的缓冲区就是共享资源。
8.2 优点和关系
优点:解耦,支持并发,支持忙闲不均
关系:生产者和生产者是互斥关系,生产者和消费者是同步关系和互斥关系,消费者和消费者是互斥关系
口诀:三种关系、两种角色(生产者和消费者)、一个交易场所(缓冲区)
8.3 BlockQueue生产者-消费者模型
blockqueue.hpp
#pragma once
#include "task.hpp"
#include <iostream>
#include <queue>
#include <pthread.h>//队列满了不能生产了,应该让消费者消费,生产者等待
//队列空了不能消费了,应该让生产者生产,消费者等待template <class T>
class blockqueue
{
private:std::queue<T> _queue; //阻塞队列int _capacity; //容量pthread_mutex_t _mutex; //锁(一把锁保证线程同步访问共享资源)pthread_cond_t _producer_cond; //控制生产者生产或等待条件变量pthread_cond_t _consumer_cond; //控制消费者消费或等待条件变量
public:blockqueue(int capacity = 5):_capacity(capacity){pthread_mutex_init(&_mutex, nullptr);pthread_cond_init(&_producer_cond, nullptr);pthread_cond_init(&_consumer_cond, nullptr);}~blockqueue() {pthread_mutex_destroy(&_mutex);pthread_cond_destroy(&_producer_cond);pthread_cond_destroy(&_consumer_cond);}
private:bool isfull() const { return _queue.size() == _capacity; }bool isempty() const { return _queue.empty(); }
public:void push(const T& data) //队列满了,生产等待,唤醒消费者消费{pthread_mutex_lock(&_mutex);while(isfull()) //if(isfull())可能存在多线程误唤醒继续执行if判断条件后代码从而导致队列中数据超出容量大小问题 -> 解决:while(isfull()){//为什么pthread_cond_wait要带上锁参数?因为线程等待持有锁会导致饥饿问题,因此必须传锁参数释放锁//再次被唤醒后从哪里运行?因为是在临界区中加上条件变量来等待,所以被唤醒后也是从pthread_cond_wait等待处向后运行pthread_cond_wait(&_producer_cond, &_mutex); }_queue.push(data);pthread_cond_signal(&_consumer_cond); //唤醒消费者pthread_mutex_unlock(&_mutex);}void pop(T* data) //队列空了,消费者等待,唤醒生产者生产{pthread_mutex_lock(&_mutex);while(isempty()) //同理while(isfull()){pthread_cond_wait(&_consumer_cond, &_mutex); }*data = _queue.front();_queue.pop();pthread_cond_signal(&_producer_cond); //唤醒生产者pthread_mutex_unlock(&_mutex);}}; //!blockqueue
task.hpp
#pragma once
#include <iostream>
#include <string>//两数加减乘除任务class task
{
private:int _x; //左操作数int _y; //右操作数int _result; //结果char _operation; //操作public:task() {}task(const int& x, const int& y, const char& operation):_x(x),_y(y),_operation(operation),_result(0){}~task() {}public:void operator()(){switch(_operation){case '+':_result = _x + _y;break;case '-':_result = _x - _y;break;case '*':_result = _x * _y;break;case '/':if(_y == 0) { std::cout << "division by zero err" << std::endl; break; }else _result = _x / _y;break;case '%':_result = _x % _y;break;default:break;}}std::string printresult(){return std::to_string(_result);}std::string printargs(){return std::to_string(_x) + " " + _operation + " " + std::to_string(_y) + " = ?";}}; //!task
test.cc
#include "block_queue.hpp"
#include "task.hpp"
#include <pthread.h>
#include <ctime>
#include <cstdlib>
#include <unistd.h>void* consumer_execute(void* args)
{blockqueue<task>* bq = static_cast<blockqueue<task>*>(args);while(true){//sleep(1);//从阻塞队列拉取数据task t;bq->pop(&t);//通过数据处理相关业务t(); //调用operator()()std::cout<< pthread_self() << " pop result : " << t.printresult() << std::endl;}
}void* producer_execute(void* args)
{blockqueue<task>* bq = static_cast<blockqueue<task>*>(args);std::string operations = "+-*/%";while(true){//sleep(1);//生产数据int x = rand() % 10 + 1;int y = rand() % 15 + 1;char operation = operations[rand() % (operations.size())];//数据推送到阻塞队列(共享资源)task t(x, y, operation);bq->push(t);std::cout << pthread_self() << " push task:" << t.printargs() << std::endl;}
}int main()
{srand((size_t)time(nullptr));blockqueue<task>* bq = new blockqueue<task>(); //阻塞队列(共享资源)pthread_t consumer[4], producer[2];pthread_create(&producer[0], nullptr, producer_execute, bq); //生产者线程pthread_create(&producer[1], nullptr, producer_execute, bq); pthread_create(&consumer[0], nullptr, consumer_execute, bq); //消费者线程pthread_create(&consumer[1], nullptr, consumer_execute, bq);pthread_create(&consumer[2], nullptr, consumer_execute, bq);pthread_create(&consumer[3], nullptr, consumer_execute, bq);pthread_join(producer[0], nullptr);pthread_join(producer[1], nullptr);pthread_join(consumer[0], nullptr);pthread_join(consumer[1], nullptr);pthread_join(consumer[2], nullptr);pthread_join(consumer[3], nullptr);delete bq;bq = nullptr;return 0;
}
8.4 POSIX信号量
POSIX信号量和SystemV信号量作用相同,都是用于同步操作,达到无冲突的访问共享资源目的。 但POSIX可以用于线程间同步。本质就是一个计数器,用来描述多线程共享资源的多少,申请信号量成功,便有对应资源可以使用,反之不成功对应资源不可用,进行PV操作(P操作(wait操作)被称为"Probeer",V操作(signal操作)被称为"Verhoog")。
8.4.1 信号量初始化
| 选项 | 内容 |
|---|---|
| 函数体 | int sem_init(sem_t *sem, int pshared, unsigned int value); |
| 函数功能 | 信号量初始化(pshared:0表示线程间共享,非零表示进程间共享;value:信号量初始值) |
| 返回值 | 成功返回0,失败返回-1,错误码被设置 |
8.4.2 信号量销毁
| 选项 | 内容 |
|---|---|
| 函数体 | int sem_destroy(sem_t *sem); |
| 函数功能 | 销毁信号量 |
| 返回值 | 成功返回0,失败返回-1,错误码被设置 |
8.4.3 等待信号量
| 选项 | 内容 |
|---|---|
| 函数体 | int sem_wait(sem_t *sem); |
| 函数功能 | 等待信号量,信号量值-1 |
| 返回值 | 成功返回0,失败返回-1,错误码被设置 |
8.4.4 发布信号量
| 选项 | 内容 |
|---|---|
| 函数体 | int sem_post(sem_t *sem); |
| 函数功能 | 发布信号量,信号量值+1 |
| 返回值 | 成功返回0,失败返回-1,错误码被设置 |
8.5 RingQueue生产者-消费者模型
利用数组模拟环形队列,生产者在队列尾部push数据,消费者在队列头部pop数据,满和空的判断:生产者和消费者指向同一数组空间时队列就是满的,生产者和消费者不指向同一数组空间时队列就是空的 ;只有空和满的时候,生产者和消费者是访问同一个位置的,不为空和满的时候,生产者和消费者是可以并发访问的资源的。另外,生产者关注的是空间,消费者关心的是数据;那么生产者初始信号量就是数组大小,而消费者初始信号量就是0;没有数据时,生产者先生产,生产者就P操作申请空间信号量,数据放进去,此时生产者完成V操作释放数据信号量,当有数据信号量时,消费者就P操作申请数据信号量,空间就释放处一个,此时消费者就V操作释放空间信号量。
ring_queue.hpp
#pragma once
#include <iostream>
#include <semaphore.h>
#include <vector>
#include <pthread.h>static const size_t N = 5;template <class T>
class ringqueue
{
private:std::vector<T> _queue; //环形队列int _capacity; //容量int _consumerindex; //消费位置int _producerindex; //生产位置sem_t _datasem; //数据信号量(仅消费者关心)sem_t _spacesem; //空间信号量(仅生产者关心)pthread_mutex_t _consumermutex; //消费者之间的锁(保证消费者之间的同步)pthread_mutex_t _producermutex; //生产者之间的锁(保证生产者之间的同步)public:ringqueue(int num = N):_queue(num),_capacity(num){sem_init(&_datasem, 0, 0); //初始没有数据sem_init(&_spacesem, 0, _capacity); //初始空间全部未使用pthread_mutex_init(&_consumermutex, nullptr);pthread_mutex_init(&_producermutex, nullptr);_producerindex = _consumerindex = 0;}~ringqueue(){sem_destroy(&_datasem);sem_destroy(&_spacesem);pthread_mutex_destroy(&_consumermutex);pthread_mutex_destroy(&_producermutex);}public://生产者先申请锁还是先申请信号量?//先申请信号量(先分配空间资源,再分配锁,好比先占好位置再上厕所(此时空间资源先得到上锁后去上厕所别人就无法占用;相比先申请锁效率略高)void push(const T& data){P(_spacesem); //P操作:申请空间信号量(一定有空间资源,无需判断)lock(_producermutex);_queue[_producerindex++] = data;_producerindex %= _capacity;V(_datasem); //V操作:释放数据信号量unlock(_producermutex);}void pop(T* data){P(_datasem); //P操作:申请数据信号量(一定有数据,无需判断)lock(_consumermutex); //和push()中同理(*data) = _queue[_consumerindex++];_consumerindex %= _capacity;V(_spacesem); //V操作:释放空间信号量unlock(_consumermutex);}private:void P(sem_t& sem) { sem_wait(&sem); } //P:信号量-1void V(sem_t& sem) { sem_post(&sem); } //V:信号量+1void lock(pthread_mutex_t& mutex) { pthread_mutex_lock(&mutex); } //加锁void unlock(pthread_mutex_t& mutex) { pthread_mutex_unlock(&mutex); } //解锁}; //!ringqueue
task.hpp
#pragma once
#include <iostream>
#include <string>
#include <unistd.h>//两数加减乘除任务class task
{
private:int _x; //左操作数int _y; //右操作数int _result; //结果char _operation; //操作public:task() {}task(const int& x, const int& y, const char& operation):_x(x),_y(y),_operation(operation),_result(0){}~task() {}public:void operator()(){switch(_operation){case '+':_result = _x + _y;break;case '-':_result = _x - _y;break;case '*':_result = _x * _y;break;case '/':if(_y == 0) { std::cout << "division by zero err" << std::endl; break; }else _result = _x / _y;break;case '%':_result = _x % _y;break;default:break;}usleep(1000); //处理任务所花费时间}std::string printresult(){return std::to_string(_x) + " " + _operation + " " + std::to_string(_y) + "=" + std::to_string(_result);}std::string printargs(){return std::to_string(_x) + " " + _operation + " " + std::to_string(_y) + " = ?";}}; //!task
test.cc
#include "ring_queue.hpp"
#include "task.hpp"
#include <pthread.h>
#include <ctime>
#include <unistd.h>//线程一定是生产者先运行:生产者信号量初始值是N,不会等待挂起;消费者信号量初始值是0,会等待挂起void* producer_execute(void* args)
{ringqueue<task>* rq = static_cast<ringqueue<task>*>(args);std::string operations = "+-*/%";while(true){sleep(1);int x = rand() % 10 + 1;int y = rand() % 20 + 1;char operation = operations[rand() % operations.size()];task t(x, y, operation);rq->push(t);std::cout << pthread_self() << " push task: " << t.printargs() << std::endl;}
}void* consumer_execute(void* args)
{ringqueue<task>* rq = static_cast<ringqueue<task>*>(args);while(true){task t;rq->pop(&t);t(); //调用operator()()std::cout<< pthread_self() << " pop result : " << t.printresult() << std::endl;}
}//多生产多消费
//加锁的意义:防止生产者同时构建任务,防止消费者同时处理任务
//信号量的意义:不用堆临界区做判断就知道临界资源的使用情况int main()
{srand((size_t)time(nullptr));ringqueue<task>* rq = new ringqueue<task>();pthread_t consumer[4], producer[2];for(size_t i = 0; i < 2; ++i){pthread_create(producer + i, nullptr, producer_execute, rq);}for(size_t i = 0; i < 4; ++i){pthread_create(consumer + i, nullptr, consumer_execute, rq);}for(size_t i = 0; i < 2; ++i){pthread_join(producer[i], nullptr);}for(size_t i = 0; i < 4; ++i){pthread_join(consumer[i], nullptr);}return 0;
}
9. 线程池
threadpool_V1.hpp
#pragma once
#include <iostream>
#include <string>
#include <unistd.h>
#include <vector>
#include <queue>
#include <pthread.h>static const size_t N = 5;//version1: 创建和启动线程同步template <class T>
class threadpool
{
private:std::vector<pthread_t> _threads; //线程池size_t _size; //线程个数std::queue<T> _tasks; //任务队列pthread_mutex_t _mutex; //保证多线程同步访问任务队列的锁pthread_cond_t _condition; //等待/唤醒线程public:threadpool(int num = N):_size(num),_threads(num){pthread_mutex_init(&_mutex, nullptr);pthread_cond_init(&_condition, nullptr);}~threadpool(){pthread_mutex_destroy(&_mutex);pthread_cond_destroy(&_condition);}public:void init() {}void start(){for(size_t i = 0; i < _size; ++i){pthread_create(&_threads[i], nullptr, startroutine, this);}}void pushtask(const T& t){lock();_tasks.push(t);threadwakeup(); //唤醒线程unlock();}private:static void* startroutine(void* args) //static修饰减少类this指针,无法访问类成员变量{ pthread_detach(pthread_self()); //当一个分离的线程终止时,它的资源被自动释放回系统threadpool<T>* self_this = static_cast<threadpool<T>*>(args);while(true){//检测任务列表中是否有任务,有:处理,无:等待self_this->lock();while(self_this->isempty()){self_this->threadwait();}T t = self_this->poptask();self_this->unlock();t(); //处理任务是私有并没有访问共享资源无需在临界区中处理std::cout << "disposed task -> result: " << t.printresult() << std::endl;}}void lock() { pthread_mutex_lock(&_mutex); }void unlock() { pthread_mutex_unlock(&_mutex); }void threadwait() { pthread_cond_wait(&_condition, &_mutex); }void threadwakeup() { pthread_cond_signal(&_condition); }bool isempty() { return _tasks.empty(); }T poptask(){T t = _tasks.front();_tasks.pop();return t;}}; //!threadpool
thread_library.hpp
#pragma once#include <iostream>
#include <string>
#include <pthread.h>namespace MyThread
{class thread{private:typedef void (*task)(void*);typedef enum {CONSTRUCT = 0, //新建状态RUNNING, //运行状态EXITED //退出状态}status; private:pthread_t _id; //线程idstd::string _name; //线程名task _task; //任务(需被设置)status _status; //状态void* _args; //参数public:thread(size_t id, task task, void* args):_status(CONSTRUCT),_id(id),_task(task),_args(args){char name[64];snprintf(name, 64, "thread-%d", id);_name = name;}~thread() {}public:const int getStatus() const {return _status;}const std::string& getName() const {return _name;}const pthread_t getId() const {if(_status == RUNNING) return _id;else std::cout << " thread is not running, no id " << std::endl ; return 0;}void operator()() { if(_args != nullptr) _task(_args); } //成员函数调用类中的被设置的任务//类的成员函数具有默认参数this// void* routine(void* args) errorstatic void* routine(void* args) //OK{//_task(_args); //err:static成员函数无法直接访问类内成员 解决方式pthread_create传参数直接传thisthread* self_this = static_cast<thread*>(args);(*self_this)(); //对象调用operator()return nullptr;}void run(){int ret = pthread_create(&_id, nullptr, routine, this);if(ret != 0) exit(1);_status = RUNNING;}void join(){int ret = pthread_join(_id, nullptr);if(ret != 0) {std::cerr << "join thread:" << _name << "(error)" << std::endl; return;}_id = 0;_status = EXITED;}}; //!thread} //!MyThread
threadpool_V2.hpp
#pragma once
#include <iostream>
#include <unistd.h>
#include <vector>
#include <queue>
#include "thread_library.hpp"static const size_t N = 5;// 引入自定义线程使得创建和启动线程分离template <class T>
class threadpool
{
private:std::vector<MyThread::thread> _threads; //线程池size_t _size; //线程个数std::queue<T> _tasks; //任务队列pthread_mutex_t _mutex; //保证多线程同步访问任务队列的锁pthread_cond_t _condition; //等待/唤醒线程public:threadpool(int num = N):_size(num){pthread_mutex_init(&_mutex, nullptr);pthread_cond_init(&_condition, nullptr);}~threadpool(){for(auto& thread : _threads){thread.join();}pthread_mutex_destroy(&_mutex);pthread_cond_destroy(&_condition);}public:void init() //创建线程{for(size_t i = 0; i < _size; ++i){_threads.push_back(MyThread::thread(i, startroutine, this));}}void start() //运行线程{for(auto& thread : _threads){thread.run();}}void pushtask(const T& t){lock();_tasks.push(t);threadwakeup(); //唤醒线程unlock();}private:static void startroutine(void* args) //static修饰减少类this指针,无法访问类成员变量{ //pthread_detach(pthread_self()); threadpool<T>* self_this = static_cast<threadpool<T>*>(args);while(true){//检测任务列表中是否有任务,有:处理,无:等待self_this->lock();while(self_this->isempty()){self_this->threadwait();}T t = self_this->poptask();self_this->unlock();t(); //处理任务是私有并没有访问共享资源无需在临界区中处理std::cout << "disposed task -> result: " << t.printresult() << std::endl;}}void lock() { pthread_mutex_lock(&_mutex); }void unlock() { pthread_mutex_unlock(&_mutex); }void threadwait() { pthread_cond_wait(&_condition, &_mutex); }void threadwakeup() { pthread_cond_signal(&_condition); }bool isempty() { return _tasks.empty(); }T poptask(){T t = _tasks.front();_tasks.pop();return t;}}; //!threadpool
lock_guard.hpp
#pragma once#include <iostream>
#include <pthread.h>//对锁封装namespace MyThread
{class mutex {private:pthread_mutex_t* _mutex;public:mutex(pthread_mutex_t* mutex):_mutex(mutex){}~mutex() { }public:void lock(){pthread_mutex_lock(_mutex);}void unlock(){pthread_mutex_unlock(_mutex);}}; //!mutex class lockguard //锁保护装置:调用对象,构造加锁,析构解锁{private:mutex _mutex;public:lockguard(pthread_mutex_t* mutex):_mutex(mutex){_mutex.lock();}~lockguard() { _mutex.unlock(); }}; //!lockguard}; //!MyThread
threadpool_V3.hpp
#pragma once
#include <iostream>
#include <unistd.h>
#include <vector>
#include <queue>
#include "lock_guard.hpp"
#include "thread_library.hpp"static const size_t N = 5;// 引入自定义线程使得创建和启动线程分离 + 自定义锁重写加锁解锁template <class T>
class threadpool
{
private:std::vector<MyThread::thread> _threads; // 线程池size_t _size; // 线程个数std::queue<T> _tasks; // 任务队列pthread_mutex_t _mutex; // 保证多线程同步访问任务队列的锁pthread_cond_t _condition; // 等待/唤醒线程public:threadpool(int num = N): _size(num){pthread_mutex_init(&_mutex, nullptr);pthread_cond_init(&_condition, nullptr);}~threadpool(){for (auto &thread : _threads){thread.join();}pthread_mutex_destroy(&_mutex);pthread_cond_destroy(&_condition);}public:void init() // 创建线程{for (size_t i = 0; i < _size; ++i){_threads.push_back(MyThread::thread(i, startroutine, this));}}void start() // 运行线程{for (auto &thread : _threads){thread.run();}}void pushtask(const T &t){MyThread::lockguard lock(&_mutex);_tasks.push(t);threadwakeup(); // 唤醒线程}private:static void startroutine(void *args) // static修饰减少类this指针,无法访问类成员变量{// pthread_detach(pthread_self());threadpool<T> *self_this = static_cast<threadpool<T> *>(args);while (true){T t;{ //临界区MyThread::lockguard lock(self_this->getmutex());// 检测任务列表中是否有任务,有:处理,无:等待while (self_this->isempty()){self_this->threadwait();}t = self_this->poptask();}t(); // 处理任务是私有并没有访问共享资源无需在临界区中处理std::cout << "disposed task -> result: " << t.printresult() << std::endl;}}void lock() { pthread_mutex_lock(&_mutex); }void unlock() { pthread_mutex_unlock(&_mutex); }void threadwait() { pthread_cond_wait(&_condition, &_mutex); }void threadwakeup() { pthread_cond_signal(&_condition); }bool isempty() { return _tasks.empty(); }pthread_mutex_t *getmutex() { return &_mutex; }T poptask(){T t = _tasks.front();_tasks.pop();return t;}}; //! threadpool
task.hpp
#pragma once
#include <iostream>
#include <string>
#include <unistd.h>//两数加减乘除任务class task
{
private:int _x; //左操作数int _y; //右操作数int _result; //结果char _operation; //操作public:task() {}task(const int& x, const int& y, const char& operation):_x(x),_y(y),_operation(operation),_result(0){}~task() {}public:void operator()(){switch(_operation){case '+':_result = _x + _y;break;case '-':_result = _x - _y;break;case '*':_result = _x * _y;break;case '/':if(_y == 0) { std::cout << "division by zero err" << std::endl; break; }else _result = _x / _y;break;case '%':_result = _x % _y;break;default:break;}}std::string printresult(){return std::to_string(_x) + " " + _operation + " " + std::to_string(_y) + " = " + std::to_string(_result);}std::string printargs(){return std::to_string(_x) + " " + _operation + " " + std::to_string(_y) + " = ?";}}; //!task
test.cc
//#include "threadpool_V1.hpp"
//#include "threadpool_V2.hpp"
#include "threadpool_V3.hpp"
#include "task.hpp"
#include <memory>int main()
{std::unique_ptr<threadpool<task>> tp(new threadpool<task>()); //交给智能指针来管理tp->init();tp->start();while(true){int x, y; char operation;std::cout << "enter x>:";std::cin >> x;std::cout << "enter y>:";std::cin >> y;std::cout << "enter operation(+-*/%)>:";std::cin >> operation;task t(x, y, operation);tp->pushtask(t);usleep(100);}return 0;
}
threadpool_V4.hpp
#pragma once
#include <iostream>
#include <unistd.h>
#include <vector>
#include <queue>
#include "lock_guard.hpp"
#include "thread_library.hpp"// 引入自定义线程使得创建和启动线程分离 + 自定义锁重写加锁解锁 + 单例模式static const size_t N = 5;template <class T>
class threadpool
{
private:std::vector<MyThread::thread> _threads; // 线程池size_t _size; // 线程个数std::queue<T> _tasks; // 任务队列pthread_mutex_t _mutex; // 保证多线程同步访问任务队列的锁pthread_cond_t _condition; // 等待/唤醒线程static threadpool<T> *_instance; // 单例线程池地址static pthread_mutex_t _instancemutex; // 保证多线程单例模式private:threadpool(int num = N): _size(num){pthread_mutex_init(&_mutex, nullptr);pthread_cond_init(&_condition, nullptr);}threadpool(const threadpool &tp) = delete;threadpool &operator=(const threadpool &tp) = delete;public:// 单次_instance==nullptr判断的问题:多线程下可能多个线程同时调用getinstance() -> 可能会多次new而有多份单例// 解决方法:加锁static threadpool<T> *getinstance() // 静态成员{if (_instance == nullptr) // 提高效率:单例模式下只有一次ne,防止每次调用getinstance()都加锁{MyThread::lockguard lock(&_instancemutex);if (_instance == nullptr) // 保证单例模式{_instance = new threadpool<T>();_instance->init();_instance->start();}}return _instance;}~threadpool(){for (auto &thread : _threads){thread.join();}pthread_mutex_destroy(&_mutex);pthread_cond_destroy(&_condition);}public:void init() // 创建线程{for (size_t i = 0; i < _size; ++i){_threads.push_back(MyThread::thread(i, startroutine, this));}}void start() // 运行线程{for (auto &thread : _threads){thread.run();}}void pushtask(const T &t){MyThread::lockguard lock(&_mutex);_tasks.push(t);threadwakeup(); // 唤醒线程}private:static void startroutine(void *args) // static修饰减少类this指针,无法访问类成员变量{// pthread_detach(pthread_self());threadpool<T> *self_this = static_cast<threadpool<T> *>(args);while (true){T t;{ // 临界区MyThread::lockguard lock(self_this->getmutex());// 检测任务列表中是否有任务,有:处理,无:等待while (self_this->isempty()){self_this->threadwait();}t = self_this->poptask();}t(); // 处理任务是私有并没有访问共享资源无需在临界区中处理std::cout << "disposed task -> result: " << t.printresult() << std::endl;}}void lock() { pthread_mutex_lock(&_mutex); }void unlock() { pthread_mutex_unlock(&_mutex); }void threadwait() { pthread_cond_wait(&_condition, &_mutex); }void threadwakeup() { pthread_cond_signal(&_condition); }bool isempty() { return _tasks.empty(); }pthread_mutex_t *getmutex() { return &_mutex; }T poptask(){T t = _tasks.front();_tasks.pop();return t;}}; //! threadpooltemplate <class T>
threadpool<T>* threadpool<T>::_instance = nullptr;
template <class T>
pthread_mutex_t threadpool<T>::_instancemutex = PTHREAD_MUTEX_INITIALIZER;
test_threadpoolV4.cc
#include "threadpool_V4.hpp"
#include "task.hpp"
#include <memory>int main()
{while(true){int x, y; char operation;std::cout << "enter x>:";std::cin >> x;std::cout << "enter y>:";std::cin >> y;std::cout << "enter operation(+-*/%)>:";std::cin >> operation;task t(x, y, operation);threadpool<task>::getinstance()->pushtask(t);usleep(100);}return 0;
}
10. 常见锁
悲观锁:在每次取数据时,总是担心数据会被其他线程修改,所以会在取数据前先加锁(读锁,写锁,行锁等),当其他线程想要访问数据时,被阻塞挂起。
乐观锁:每次取数据时候,总是乐观的认为数据不会被其他线程修改,因此不上锁。但是在更新数据前,会判断其他数据在更新前有没有对数据进行修改。主要采用两种方式:版本号机制和CAS操作(当需要更新数据时,判断当前内存值和之前取得的值是否相等。如果相等则用新值更新。若不等则失败,失败则重试,一般是一个自旋的过程,即不断重试。)。
自旋锁:线程获取锁的时候,如果锁被其他线程持有,则当前线程将循环等待,直到获取到锁。自旋锁等待期间,线程的状态不会改变,线程一直是用户态并且是活动的 (active)。自旋锁如果持有锁的时间太长,则会导致其它等待获取锁的线程耗尽CPU。自旋锁本身无法保证公平性,同时也无法保证可重入性。
读写锁:读写锁也称为共享-独占(shared-exclusive)锁,当读写锁以读模式加锁时,它是以共享模式锁住,当以写模式加锁时,它是以独占模式锁住。 读写锁非常适合读数据的频率远大于写数据的频率从的应用中。 这样可以在任何时刻运行多个读线程并发的执行,给程序带来了更高的并发度。只要没有写模式下的加锁,任意线程都可以进行读模式下的加锁;只有读写锁处于不加锁状态时,才能进行写模式下的加锁。
自旋锁:
- int pthread_spin_destroy(pthread_spinlock_t *lock);
- int pthread_spin_init(pthread_spinlock_t *lock, int pshared);
- int pthread_spin_lock(pthread_spinlock_t *lock);
- int pthread_spin_unlock(pthread_spinlock_t *lock);
读写锁:
- int pthread_rwlock_init(pthread_rwlock_t *restrict rwlock,const pthread_rwlockattr_t * restrict attr);
- int pthread_rwlock_destroy(pthread_rwlock_t *rwlock);
- int pthread_rwlock_rdlock(pthread_rwlock_t *rwlock);
- int pthread_rwlock_wrlock(pthread_rwlock_t *rwlock);
- int pthread_rwlock_unlock(pthread_rwlock_t *rwlock);
- int pthread_rwlockattr_setkind_np(pthread_rwlockattr_t *attr, int pref);
相关文章:
Linux -- 线程
文章目录 1. 线程概念1.1 概念1.2 理解(Linux OS角度)1.3 见一见 2. 线程优缺点3. 线程使用3.1 认识线程库3.2 使用3.2.1 线程创建3.2.2 线程等待3.2.3 线程退出3.2.4 线程取消3.2.5 获取线程id3.2.6 线程分离 3.3 理解线程库3.4 证明线程栈3.5 线程局部…...

Android:实时更新时间
心想着也就是更新精确到分钟,不用精确到秒,定时器就没有必要,系统是有广播Intent.ACTION_TIME_TICK可以直接用 动态注册广播 主方法里面调用一下 //要先设置一下当前时间,不然刷新时间会等到1分钟后再刷新 tv_HM.setText(getHM…...

24 鼠标常用事件
鼠标进入:enterEvent鼠标离开:leaveEvent鼠标按下:mousePressEvent鼠标释放:mouseRelaseEvent鼠标移动:mouseMoveEvent 提升为自定义控件MyLabel 代码: //mylabel.h #ifndef MYLABEL_H #define MYLABEL_H#…...
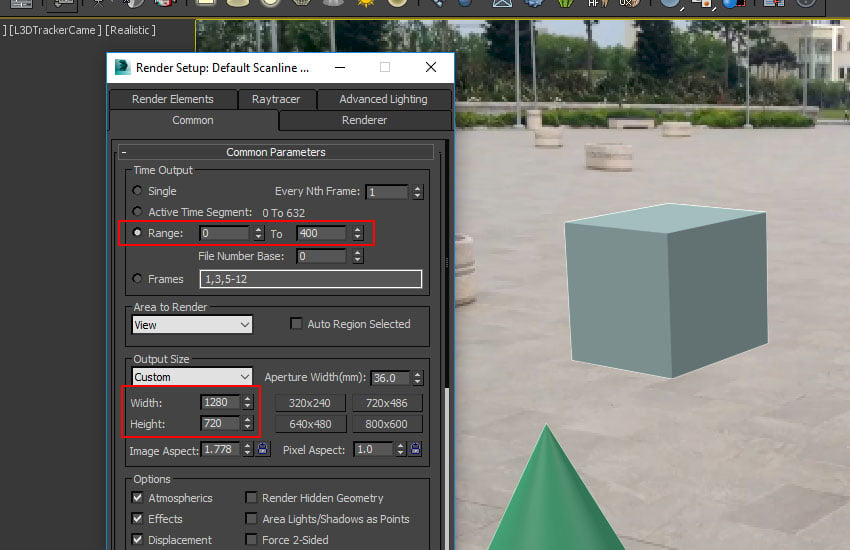
了解 3DS MAX 3D摄像机跟踪设置:第 4 部分
推荐: NSDT场景编辑器助你快速搭建可二次开发的3D应用场景 1. 项目设置 步骤 1 打开“后效”。 打开后效果 步骤 2 转到合成>新合成以创建新合成。 将“宽度”和“高度”值分别设置为 1280 和 720。将帧速率设置为 25,将持续时间设置为 12 秒。单…...

nginx吞吐量调优
调整worker_processes和worker_connections: worker_processes:设置为服务器的CPU核心数或更高。例如,如果服务器有8个CPU核心,可以将worker_processes设置为8。worker_connections:设置每个worker进程所能处理的最大连…...
)
Python操作Excel文件,修改Excel样式(openpyxl)
秋风阁-北溪入江流 文章目录 安装依赖库openpyxlopenpyxl的操作加载文件,获取sheet加载文件load_workbook获取sheet 遍历单元格迭代遍历索引遍历 单元格行高和列宽的修改Excel列号与字母的转换Excel行高修改Excel列宽修改 Excel表格文字对齐属性设置修改单元格框线保…...
7.6-实验:配置SWCRTE(下))
AutoSAR系列讲解(实践篇)7.6-实验:配置SWCRTE(下)
阅读建议: 实验篇是重点,有条件的同学最好跟着做一遍,然后回头对照着AutoSAR系列讲解(实践篇)7.5-OS原理进阶_ManGo CHEN的博客-CSDN博客理解其配置的目的和意义。本篇是接着AutoSAR系列讲解(实践篇)7.4-实验:配置SWC&RTE_ManGo CHEN的博客-CSDN博客的实验篇接着做…...

【node】使用express+gitee搭建图床,并解决防盗链问题
首先创建一个gitee的项目,详细步骤我就不一一说明 注解:大家记得将这个项目开源,还有记得获取自己的私钥,私钥操作如下: node依赖下载: "axios": "cors": "express"…...
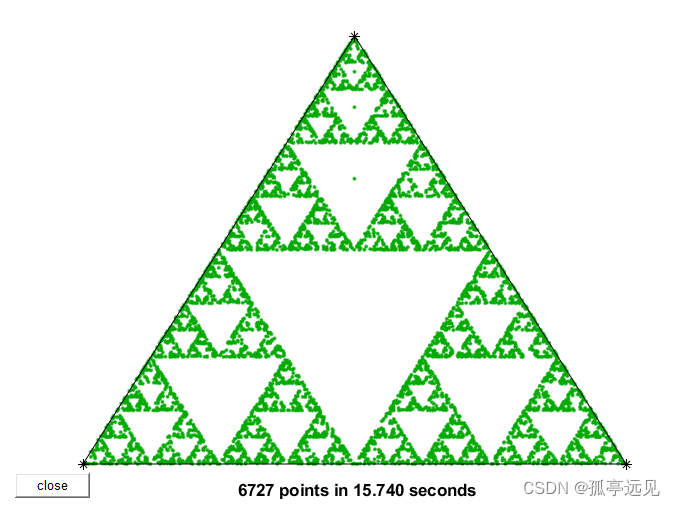
蕨型叶分形
目录 要点 基本语句 EraseMode 习题 1 设置颜色 2 旋转蕨型叶图 3 枝干 4 塞平斯基三角形 要点 蕨型叶是通过一个点的反复变换产生的,假设x是一个含有两个分量的向量,可以用来表示平面内的一个点,则可以用Axb的形式对其进行变换。 基本…...
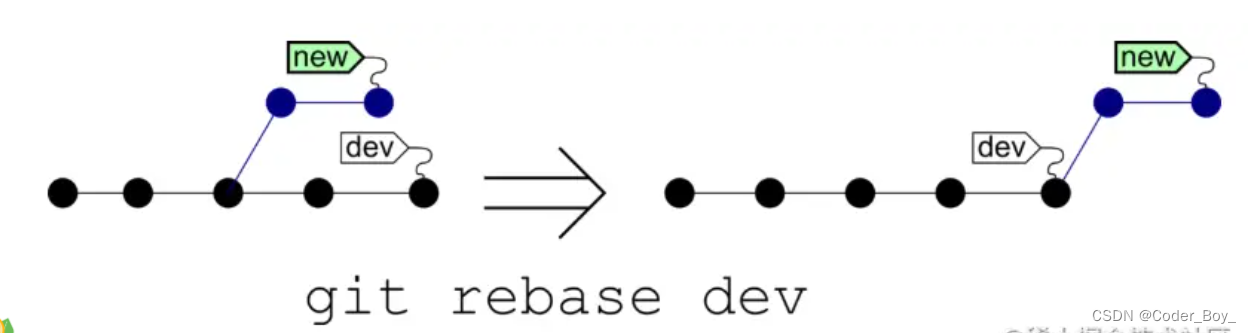
DevOps系列文章之 Git知识大全
Git常用命令 配置Git-SSH 配置Git的user name以及Git要关联的邮箱email git config --global user.name your name git config --global user.email your email 生成密钥 ruby 复制代码 $ ssh-keygen -t rsa -C "your email" 按三个回车,跳过设置密码&am…...
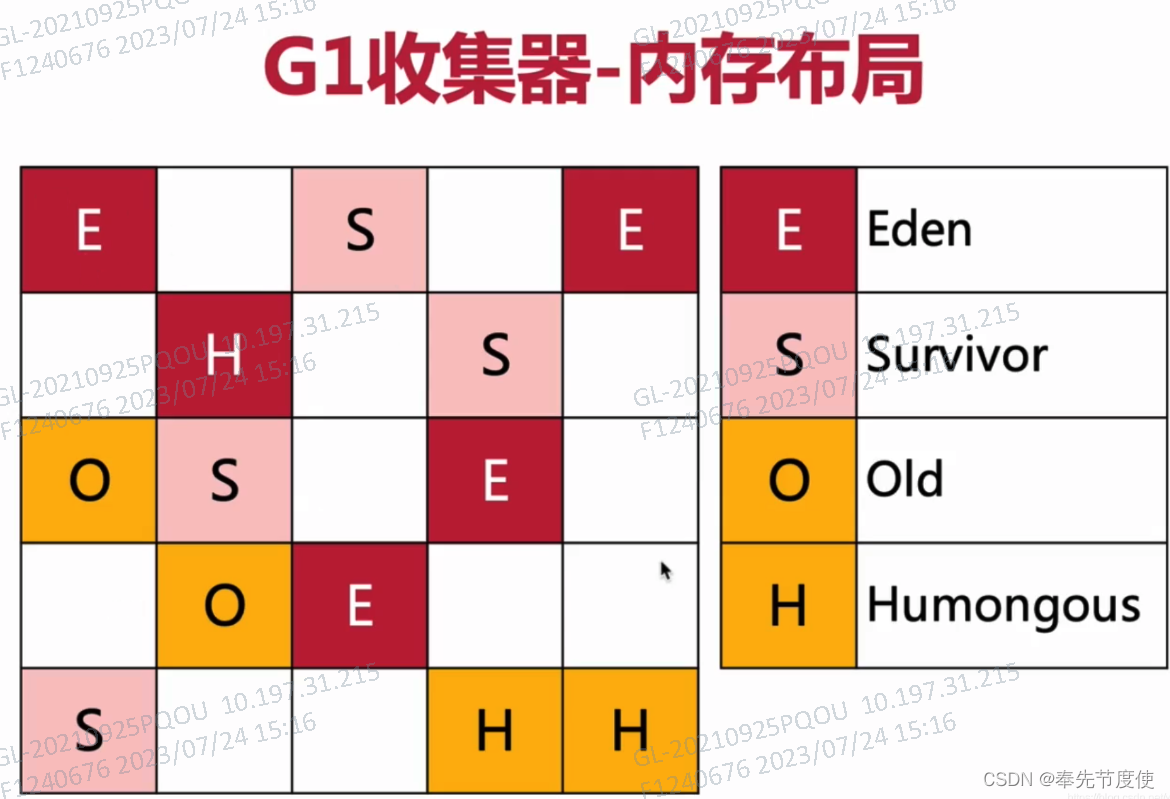
JVM理论(六)执行引擎--垃圾回收
概述 垃圾: 指的是在运行程序中没有任何指针指向的对象垃圾回收目的: 为了及时清理空间使得程序可以正常运行垃圾回收机制: JVM采取的是自动内存管理,即JVM负责对象的创建以及回收,将程序员从繁重的内存管理释放出来,更加专注业务的开发垃圾回收区域: 频繁收集Young区(新生代)…...
贪心算法重点内容
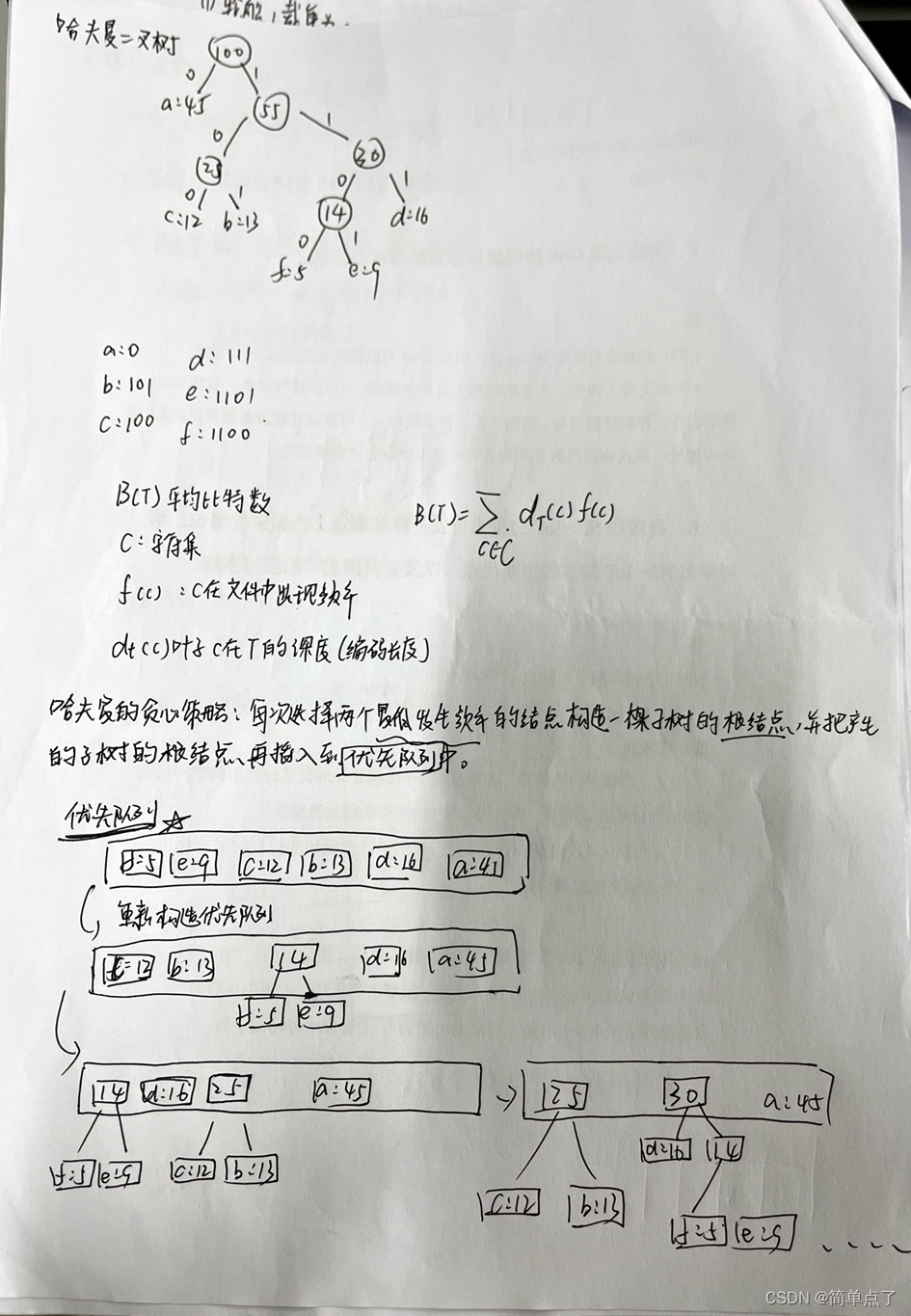
贪心算法重点内容 4.1部分背包 按照单位重量的价值排序 4.2最小生成树 两种算法 4.3单源最短路径 4.4哈夫曼树...

基于深度学习的高精度交通信号灯检测系统(PyTorch+Pyside6+YOLOv5模型)
摘要:基于深度学习的高精度交通信号灯检测识别可用于日常生活中检测与定位交通信号灯目标,利用深度学习算法可实现图片、视频、摄像头等方式的交通信号灯目标检测识别,另外支持结果可视化与图片或视频检测结果的导出。本系统采用YOLOv5目标检…...
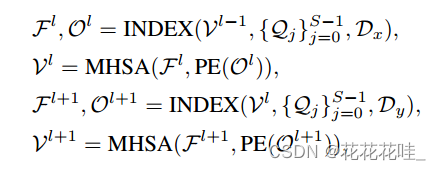
【3D目标检测】DSVT-2023CVPR
论文:https://arxiv.org/pdf/2301.06051.pdf 作者:北大,华为 代码:https://github.com/Haiyang-W/DSVT ( OpenPCDet 框架已集成) 讲解:实时部署!DSVT:3D动态稀疏体素Tr…...
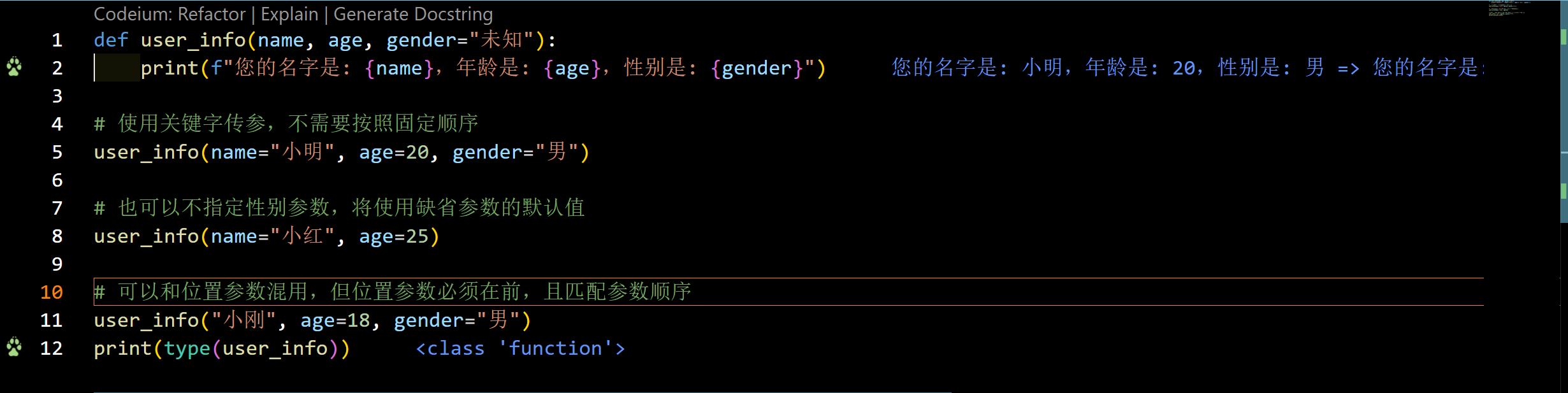
我在VScode学Python(Python函数,Python模块导入)
我的个人博客主页:如果’真能转义1️⃣说1️⃣的博客主页 (1)关于Python基本语法学习---->可以参考我的这篇博客《我在VScode学Python》 (2)pip是必须的在我们学习python这门语言的过程中Python ---->&a…...
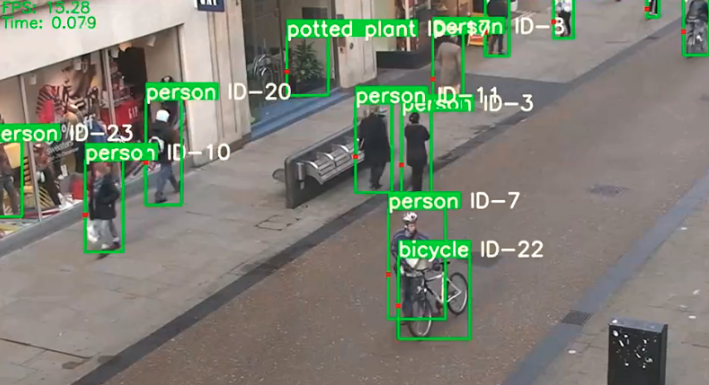
【目标跟踪】1、基础知识
文章目录 一、卡尔曼滤波二、匈牙利匹配 一、卡尔曼滤波 什么是卡尔曼滤波?——状态估计器 卡尔曼滤波用于在包含不确定信息的系统中做出预测,对系统下一步要做什么进行推测,且会结合推测值和观测值来得到修正后的最优值卡尔曼滤波就是利用…...

33. 搜索旋转排序数组
题目描述 整数数组 nums 按升序排列,数组中的值 互不相同 。 在传递给函数之前,nums 在预先未知的某个下标 k(0 < k < nums.length)上进行了 旋转,使数组变为 [nums[k], nums[k1], ..., nums[n-1], nums[0], n…...

接口自动化测试要做什么?8个步骤讲的明明白白(小白也能看懂系列)
先了解下接口测试流程: 1、需求分析 2、Api文档分析与评审 3、测试计划编写 4、用例设计与评审 5、环境搭建(工具) 6、执行用例 7、缺陷管理 8、测试报告 那"接口自动化测试"怎么弄?只需要在上篇文章的基础上再梳理下就…...

Flutter 自定义 虚线 分割线
学习使用Flutter 进行 虚线 自定义控件 练习 // 自定义虚线 (默认是垂直方向) class DashedLind extends StatelessWidget {final Axis axis; // 虚线方向final double dashedWidth; // 根据虚线的方向确定自己虚线的宽度final double dashedHeight; //…...

Java毕业设计—爱宠医院管理系统设计与实现
爱宠医院管理系统 获取数论文、代码、答辩PPT、安装包,可以查看文章底部 一、 如何安装及配置环境 要运行整个爱宠医院管理系统需要安装数据库:MySQL 5.5,开发工具:JDK 1.8,开发语开发平台:Eclipse&…...

告别鼠标卡顿:Mac Mouse Fix实现第三方鼠标全栈优化,效率提升200%的实战指南
告别鼠标卡顿:Mac Mouse Fix实现第三方鼠标全栈优化,效率提升200%的实战指南 【免费下载链接】mac-mouse-fix Mac Mouse Fix - A simple way to make your mouse better. 项目地址: https://gitcode.com/GitHub_Trending/ma/mac-mouse-fix 问题溯…...
操作与文件处理实践)
深入解析C语言中的Stream(流)操作与文件处理实践
1. 揭开C语言Stream(流)操作的神秘面纱 第一次接触C语言文件操作时,我被各种f开头的函数搞得晕头转向。直到有一天调试程序到凌晨三点,突然意识到所有文件操作本质上都是在和"流"打交道。这个顿悟让我对C语言的理解直接上了一个台阶。今天我就…...

csvlens作为库使用教程:在Rust项目中集成CSV查看功能
csvlens作为库使用教程:在Rust项目中集成CSV查看功能 【免费下载链接】csvlens Command line csv viewer 项目地址: https://gitcode.com/gh_mirrors/cs/csvlens 想要在你的Rust应用中添加一个功能强大、交互式的CSV数据查看器吗?csvlens不仅是一…...

JavaScript DXF文件生成:在浏览器中创建CAD图纸的终极方案
JavaScript DXF文件生成:在浏览器中创建CAD图纸的终极方案 【免费下载链接】js-dxf JavaScript DXF writer 项目地址: https://gitcode.com/gh_mirrors/js/js-dxf 你是否需要在Web应用中集成工程图纸生成功能?JavaScript DXF文件生成库为你提供了…...

SDMatte开源模型部署实录:从镜像拉取到首张图产出完整记录
SDMatte开源模型部署实录:从镜像拉取到首张图产出完整记录 1. 引言 SDMatte是一款面向高质量图像抠图场景的AI模型,特别适合处理主体分离、透明物体提取、边缘精修、商品图去背景等任务。对于玻璃、薄纱、羽毛、叶片等边缘细节复杂或半透明目标&#x…...

iStoreOS软路由结合Cpolar内网穿透:打造稳定高效的居家远程办公网络
1. 为什么你需要iStoreOS软路由Cpolar组合? 最近两年远程办公越来越普遍,但很多朋友都遇到过这样的困扰:公司电脑里的文件急着要用,跑回办公室又太麻烦;出差在外需要调取内网资料,VPN连接却卡成幻灯片。我自…...

丹青幻境GPU优化:Bfloat16混合精度下Z-Image推理速度提升47%
丹青幻境GPU优化:Bfloat16混合精度下Z-Image推理速度提升47% "见微知著,凝光成影。执笔入画,神游万象。" 丹青幻境 是一款基于 Z-Image 架构与 Cosplay LoRA 历练卷轴打造的数字艺术终端。它告别了冷硬的科技感,将 4090…...

DeepSeek-OCR-2惊艳效果展示:多栏/斜拍/模糊PDF精准识别对比图集
DeepSeek-OCR-2惊艳效果展示:多栏/斜拍/模糊PDF精准识别对比图集 1. 从机械扫描到智能理解:OCR技术的革命性突破 如果你曾经尝试过从PDF文档中提取文字,特别是那些排版复杂、图片模糊或者拍摄角度倾斜的文档,你一定会理解那种挫…...

OpenClaw多任务测试:百川2-13B-4bits模型在并行处理中的显存管理
OpenClaw多任务测试:百川2-13B-4bits模型在并行处理中的显存管理 1. 测试背景与动机 上周在调试一个自动化工作流时,遇到了一个典型问题:当OpenClaw同时处理文件格式转换、网页信息抓取和邮件发送任务时,后台的百川2-13B模型频繁…...

Asian Beauty Z-Image Turbo惊艳案例:单卡RTX4090每秒1.8帧的Turbo实时生成
Asian Beauty Z-Image Turbo惊艳案例:单卡RTX4090每秒1.8帧的Turbo实时生成 东方美学图像生成的本地高效解决方案 在数字内容创作蓬勃发展的今天,高质量人像图像生成需求日益增长,特别是具有东方美学特色的图像。传统云端生成方案虽然方便&am…...