四旋翼无人机使用教程
文章目录
- 前言
- 一、检查遥控器
- 电源开关
- 混控拨码开关
- 微调开关
- 飞行模式
- 刹车开关
- 行程开关
- 接收机对码
- 二、检查飞机
- 检查接线
- 三、解锁并飞行
前言
PX4固件
QGC地面站
Pixhwak飞控
Mc6c遥控器
开源飞控博大精深,欢迎广大爱好者加博主微信名片,一起学习交流。
一个人可以走的更快,一群人才能走得更远。
一、检查遥控器
这里是的是MC6C遥控,如果使用其他的遥控,可以参考:
https://mbot1.blog.csdn.net/article/details/125708875
电源开关
遥控器的开关如下图,往上拨打开遥控器,往下拨关闭遥控器。打开遥控器后,正常情况下POWER灯会常量,如果POWER灯闪烁并且遥控器蜂鸣器发出响声,说明电池快没电,此时应立即更换电池。如果在飞行过程中遥控器没电,可能会导致飞机失控。

混控拨码开关
接飞控不需要通道的混控,把下图的遥控器设置开关全部拨到最下下面,否则可能出现通道混控导致无法解锁飞机等问题

微调开关
遥控器上有四个微调按钮,对应左右两个摇杆的上下和左右的微调量,在使用时请将所有的微调量都设置在中位,否则可能导致解锁不了飞机或者飞机在飞的时候往一个方向飘。默认微调设置就在中位,但可能会在使用过程中误触导致微调偏离中位。
判断微调是否在中位的方法:
每次往上或者往下拨动微调按钮时,遥控的蜂鸣器都会响一下,只有微调在中位/最上/最下时蜂鸣器会长响,其余情况下蜂鸣器会短响。如果在往上拨微调按钮时蜂鸣器出现长响的情况,再继续往上拨微调按钮,此时如果还是长响说明上一次长响是达到了微调的最上面,如果是短响,说明上一次长响是达到了微调的中位,同理如果在往下拨微调按钮时蜂鸣器出现长响的情况,再继续往下拨微调按钮,此时如果还是长响说明上一次长响是达到了微调的最下面,如果是短响,说明上一次长响是达到了微调的中位。

飞行模式
飞行模式切换开关位置如下,是一个三档的拨码开关。最上面设置的是自稳模式,中间是定高模式,最下面是定点模式。

遥控左边上下对应油门,左右对应偏航,右边摇杆上下对应俯仰,左右对应横滚。

注解
不同飞行模式的区别可参考:
https://mbot1.blog.csdn.net/article/details/127763019
在自稳模式下,
右侧摇杆往中位以上拨,飞机将前倾,沿机头方向(飞控箭头所指的方向)往前飞
右侧摇杆往中位以下拨,飞机将后仰,沿机头方向(飞控箭头所指的方向)往后飞
右侧摇杆往中位以左拨,飞机将左横滚,沿机头方向(飞控箭头所指的方向)往左飞
右侧摇杆往中位以右拨,飞机将右横滚,沿机头方向(飞控箭头所指的方向)往右飞
左侧摇杆往中位以左拨,飞机将原地向左转机头方向
左侧摇杆往中位以右拨,飞机将原地向右转机头方向
左侧摇杆上下代表油门,遥控器的油门遥杆直接映射到飞控的油门输出,因此无人机的高度不易控制。
自稳模式下飞机并不一定在油门中位时(50%油门)保持高度悬停,例如飞机的悬停油门是40%,那么油门中位时飞机将上升,飞机的悬停油门是60%,那么油门中位时飞机将下降。
一旦右侧摇杆居中,多旋翼无人机的姿态将回平,但是受风等因素的影响,飞机可能会往一个方向飘。
定高模式
定高模式的偏航、横滚和俯仰杆的控制方式与自稳模式相同。但是油门的控制与自稳模式不同,定高模式下油门中位时,飞机在当前高度悬停,油门在中位以上时飞机将上升,油门在中位以下时飞机将下降,由于高度进行了PID闭环控制,因此高度控制的灵敏度较子翁模式要小。
定点模式
定点模式的高度控制方式和定高模式相同,同时在水平方向也根据GPS的位置信息进行了PID闭环控制,使得右侧摇杆居中时,多旋翼能够抵抗风等因素的影响,保持当前位置不漂移,同时前后左右控制的灵敏度较自稳/定高模式更小。
控制的难度:自稳》定高》定点
注意在从定高/定点模式切到自稳模式时,由于高度控制由闭环变成了开环控制,因此高度可能会突然上升或下降
刹车开关
刹车开关位于右上角(如下图),是一个两档的拨码开关
刹车开关的作用是使电机立刻停转,可在紧急情况下使用
将拨码开关拨到下面,将使能刹车,此时如果飞机在飞行中,将会直接坠落
在使能刹车的情况下,飞机是无法解锁的。

行程开关
行程开关在下图的位置,可以设置摇杆的行程,下图所示的档位就是正常的行程,使用的时候保持这个档位就可以,不要拨到另一个档位,否则会使摇杆行程变短,导致无法解锁飞机

接收机对码
无人机上电后,打开遥控器,如果接收机的灯是常量的,说明已经对码成功了。
如果灯是闪烁的,说明没有对码成功,对码方法如下:
先关闭遥控器,把接收机的下面这个按钮长按一下(需要用尖的东西戳一下),变成黄灯快闪,然后打开遥控器,变成黄灯长亮即为对码成功。

二、检查飞机
飞机的组装可以参考教程:
https://mbot1.blog.csdn.net/article/details/123156744
检查接线
检查GPS,接收机,电流计的接线是否正确,有无松动,确保桨叶在旋转时不会打到线。
飞控的箭头方向与GPS上箭头方向一致,GPS上6个脚的端子接飞控的GPS口,4个脚的端子接I2C口,电流计(接电池的那个模块)的端子接POWER口
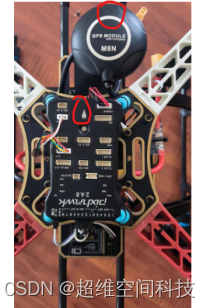
接收机接飞控的RCIN口,四个电调的信号线接飞控的MAIN通道的1到4口

三、解锁并飞行
解锁的方法为:油门打到最低,偏航打到最右,也就是左边的摇杆拨到右下角,保持约2秒,正常的话飞机会解锁,电机以怠速旋转,飞控的大LED常亮。
解锁失败的原因
如果飞控解锁失败,要分两种情况排查原因:
1、解锁时飞控不闪红灯,无任何反应,地面站也无报错
解决办法:
检查遥控器是否打开
检查遥控器的行程开关是否在正确的位置
检查遥控器的微调是否在中位
检查遥控器的混控拨码开关是否都在下面
如果设置了遥控器的解锁开关,则只能用遥控器的拨码开关解锁,不能用摇杆解锁
2、解锁时飞控闪红灯,地面站报错
解决办法:
根据具体的报错进行排查,常见的报错及解决办法参考博客:
https://mbot1.blog.csdn.net/article/details/131934515
相关文章:
四旋翼无人机使用教程
文章目录 前言一、检查遥控器电源开关混控拨码开关微调开关飞行模式刹车开关行程开关接收机对码 二、检查飞机检查接线 三、解锁并飞行 前言 PX4固件 QGC地面站 Pixhwak飞控 Mc6c遥控器 开源飞控博大精深,欢迎广大爱好者加博主微信名片,一起学习交流。…...

优化 PHP 数据库查询性能
优化 PHP 数据库查询性能可以从以下几个方面入手: 使用索引:在数据库中创建适当的索引可以大大提高查询性能。索引可以加快数据的查找速度,特别是在大型数据库中。选择合适的数据类型:选择正确的数据类型可以减少存储空间的占用&…...

vue 使用stompjs websocket连接rabbitmq
1. 首先确保rabbitmq服务已开启web-stomp 1.1 登录rabbitmq web控制台 1.2 在overview目录下 下拉找到Ports and contexts 看列表有没有http/web-stomp 1.3 如果没有需要开启 window/centos 进入rabbitmq安装目录的bin目录下执行rabbitmq-plugins enable rabbitmq_web_stomp ra…...
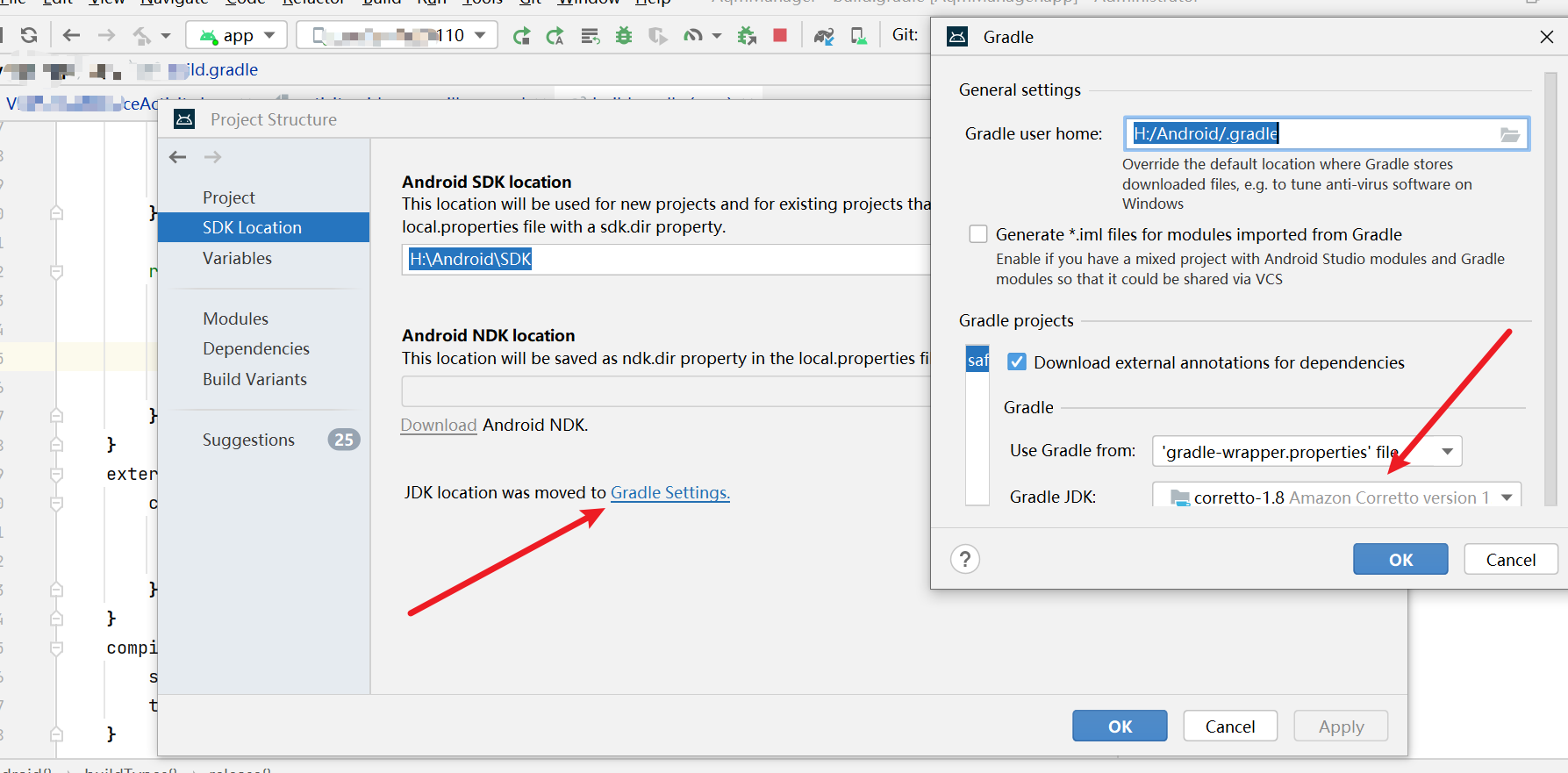
com.android.ide.common.signing.KeytoolException:
签名没问题但是提示Execution failed for task :app:packageDebug. > A failure occurred while executing com.android.build.gradle.tasks.PackageAndroidArtifact$IncrementalSplitterRunnable > com.android.ide.common.signing.KeytoolException: Failed to read ke…...
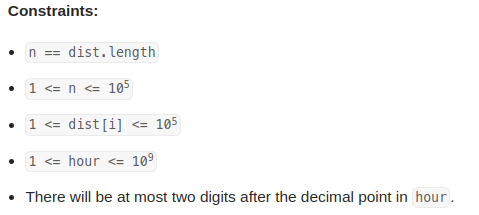
leetcode 1870. Minimum Speed to Arrive on Time(准时到达的最小速度)
需要找一个speed, 使得dist[i] / speed 加起来的时间 < hour, 而且如果前一个dist[i] / speed求出来的是小数,必须等到下一个整数时间才计算下一个。 speed最大不会超过107. 不存在speed满足条件时返回-1. 思路: 如果前一个dist[i] / speed求出来的…...

本地非文字资源无法加载
目录 方法A.静态/动态绑定路径 方法B.require导入(运行时加载) 方法C.import导入(x)(编译时加载) 方法D.ref直接操作元素赋值(x) 相关知识 import和requir区别 模板路径&#…...

Java电子招投标采购系统源码-适合于招标代理、政府采购、企业采购
功能描述 1、门户管理:所有用户可在门户页面查看所有的公告信息及相关的通知信息。主要板块包含:招标公告、非招标公告、系统通知、政策法规。 2、立项管理:企业用户可对需要采购的项目进行立项申请,并提交审批,查看…...
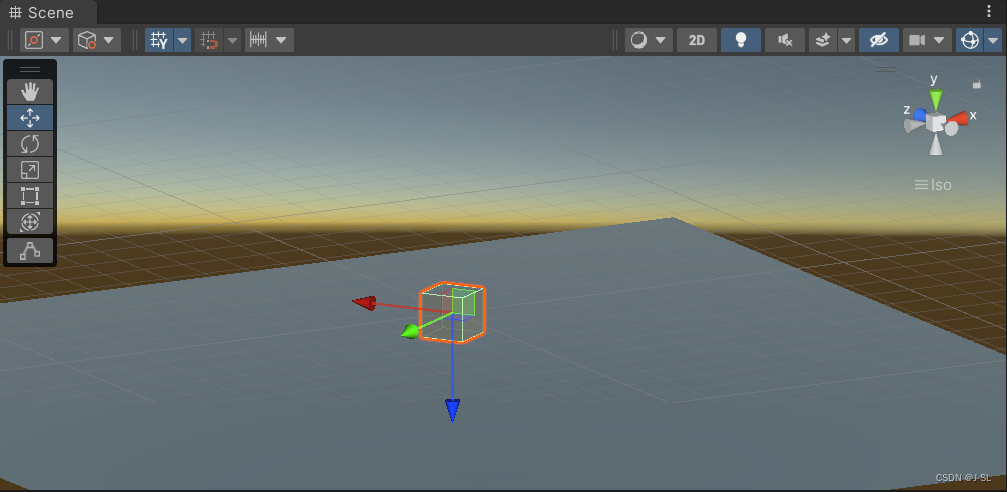
万向节死锁
要理解万向节死锁的产生原因,首先要理解欧拉角变换,欧拉角变换是基于最初始的坐标进行变换而非变换后的坐标进行变换。 欧拉角变换需要空间中的三个角(即变换后每个轴的偏移量),另外还有每个轴的变换顺序。值得注意的…...

大数据课程D1——hadoop的初识
文章作者邮箱:yugongshiyesina.cn 地址:广东惠州 ▲ 本章节目的 ⚪ 了解大数据的概念; ⚪ 了解大数据的部门结构; ⚪ 了解hadoop的定义; ⚪ 了解hadoop的发展史; 一、大数据简介 1. 概述…...

xml命名空间
xml命名空间 一个xml文档中可以包含多个元素和属性,在文档中使用多个DTD文件时,可能会碰到相同的元素,而这些名称相同的元素可能代表了完全不同的含义,为了防止命名冲突,W3C提供了一个推荐标准-XML命名空间 命名空间有…...
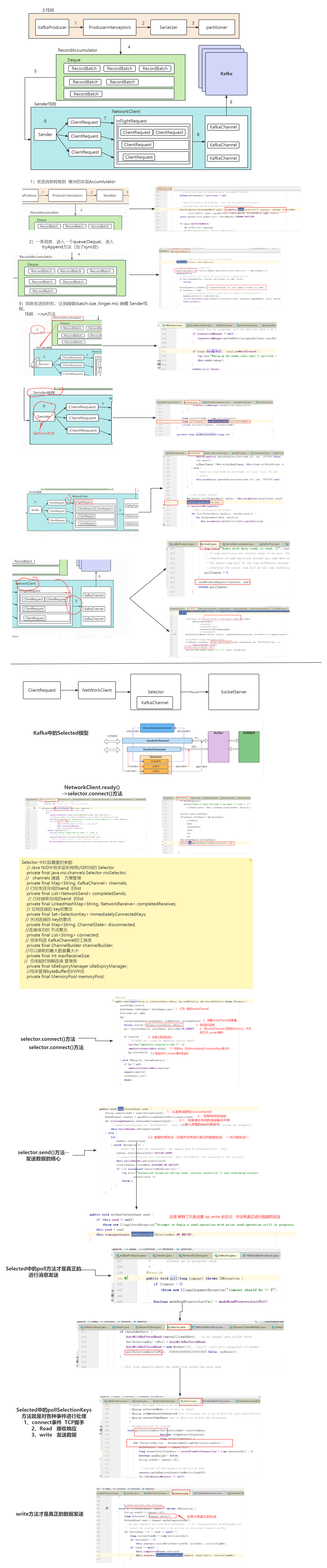
七、Kafka源码分析之网络通信
1、生产者网络设计 架构设计图 2、生产者消息缓存机制 1、RecordAccumulator 将消息缓存到RecordAccumulator收集器中, 最后判断是否要发送。这个加入消息收集器,首先得从 Deque 里找到自己的目标分区,如果没有就新建一个批量消息 Deque 加进入 2、消…...
WEB安全测试通常要考虑的测试点
1、问题:没有被验证的输入 测试方法: 数据类型(字符串,整型,实数,等) 允许的字符集 最小和最大的长度 是否允许空输入 参数是否是必须的 重复是否允许 数值范围 特定的值(枚举型&a…...
的duration音频长度获取不到问题)
关于uni.createInnerAudioContext()的duration音频长度获取不到问题
关于uni.createInnerAudioContext()的duration音频长度获取不到问题 代码如下: onLoad() {let _this this//初始化语音播放对象this.audioObj uni.createInnerAudioContext();this.audioObj.src 音频链接;// 音频进入可以播放状态,但不保证后面可以流…...

使用rknn-toolkit2把YOLOV5部署到OK3588上
使用rknn-toolkit2把YOLOV5部署到OK3588上 虚拟环境搭建软件包安装在PC机上运行yolov5目标检测 虚拟环境搭建 首先在PC的ubuntu系统安装虚拟环境: 我的服务器是ubuntu18.04版本,所以安装python3.6 conda create -n ok3588 python3.6 需要键盘输入y&…...

【雕爷学编程】Arduino动手做(93)--- 0.96寸OLED液晶屏模块14
37款传感器与执行器的提法,在网络上广泛流传,其实Arduino能够兼容的传感器模块肯定是不止这37种的。鉴于本人手头积累了一些传感器和执行器模块,依照实践出真知(一定要动手做)的理念,以学习和交流为目的&am…...
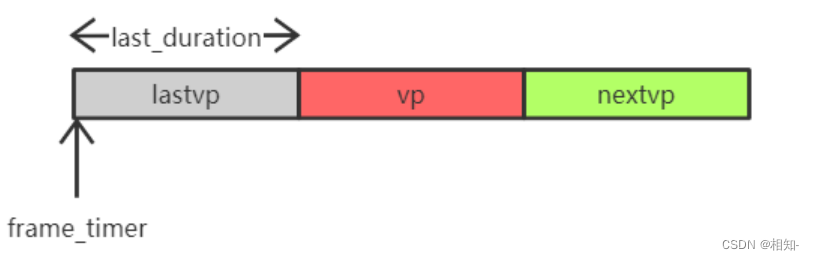
ffplay播放器剖析(5)----视频输出剖析
文章目录 1.视频输出模块1.1 视频输出初始化1.1.1 视频输出初始化主要流程1.1.2 calculate_display_rect初始化显示窗口大小 1.2 视频输出逻辑1.2.1 event_loop开始处理SDL事件1.2.2 video_refresh1.2.2.1 计算上一帧显示时长,判断是否还要继续上一帧1.2.2.2 估算当前帧显示时长…...
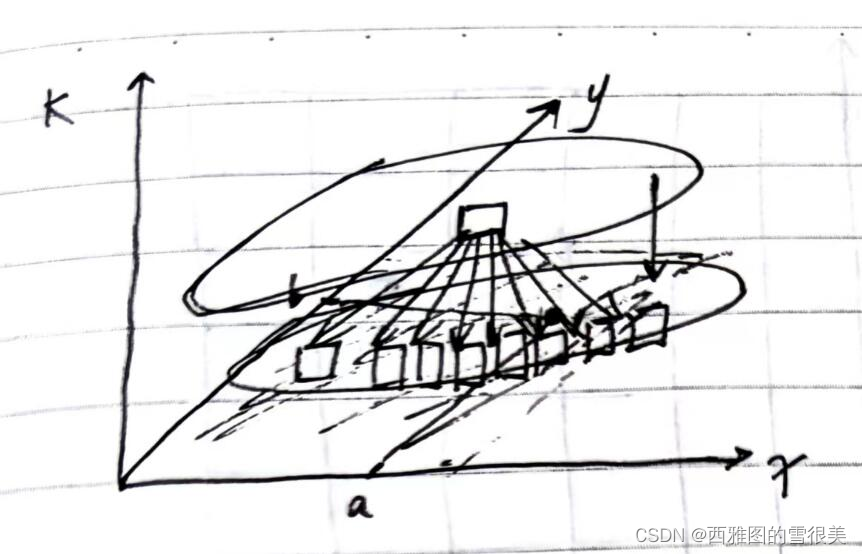
21.2:象棋走马问题
请同学们自行搜索或者想象一个象棋的棋盘, 然后把整个棋盘放入第一象限,棋盘的最左下角是(0,0)位置 那么整个棋盘就是横坐标上9条线、纵坐标上10条线的区域 给你三个 参数 x,y,k 返回“马”从(0,0)位置出发,必须走k步 …...
【CSS】手写 Tooltip 提示组件
文章目录 效果示例代码实现 效果示例 代码实现 <!DOCTYPE html> <html><head><meta charset"utf-8"><title>一颗不甘坠落的流星</title><style>body {padding: 120px;}.tooltip {position: relative;display: inline-blo…...

MySQL DDL语法
MySQL DDL语法 DDL简介 MySQL DDL(Data Definition Language)是用于定义和管理数据库结构的语言。它包括创建、修改和删除数据库、表、视图、索引和其他数据库对象的语句。DDL语法的重要性如下: 数据库结构定义:DDL语句用于创建…...

Git 绑定账号 和clone
一:环境: 下载安装完成Git,在桌面或文件夹下(在你将要保存代码的位置)右击可以看到Git Bash Here,点击可以进入黑窗口 二:配置公钥 1.查看当前状态(如果已绑定,且知道密码可以登陆,可以直接获取SSH公钥并配置即可拉取代码) git config --list 2.配置全局git用户名和邮箱 …...

C语言双端队列完整实现:一行代码吃透头尾操作,算法效率拉满
一、为什么C语言实现双端队列,是数据结构的必学天花板?在C语言数据结构里,队列、栈都是基础中的基础,但真正能把灵活度、效率、内存管理三者揉到一起的,还得是双端队列(deque)。普通队列只能一头…...

别再死记硬背SMO公式了!用Python手写一个SVM分类器,带你一步步拆解SMO核心逻辑
用Python手写SVM分类器:代码驱动理解SMO算法核心在机器学习领域,支持向量机(SVM)以其优秀的分类性能和坚实的数学基础著称。然而,许多学习者在理解其核心算法——序列最小优化(SMO)时,往往被复杂的数学推导所困扰。本文将采用一种…...

飞书远程控机:OpenClaw配置全攻略
本文详细介绍如何通过 OpenClaw 工具对接飞书开放平台,配置智能机器人实现 Windows 电脑的远程控制。主要内容涵盖文件管理和程序启动等核心功能的实现方法,并提供完整的配置指南与常见问题解决方案。 一、使用前提说明 1. 系统要求 仅适用于 Windows…...

3步解锁网易云音乐NCM加密:让音乐真正属于你
3步解锁网易云音乐NCM加密:让音乐真正属于你 【免费下载链接】ncmdump 项目地址: https://gitcode.com/gh_mirrors/ncmd/ncmdump 还在为下载的网易云音乐只能在特定客户端播放而烦恼吗?当你精心收藏的歌曲被NCM格式"锁"在单一平台时&a…...
)
CentOS服务器上VNC连接失败?手把手教你排查并修复个人端口问题(附重启命令)
CentOS服务器VNC连接故障深度排查指南:从原理到实战当你在深夜赶项目时,突然发现VNC连接不上服务器,那种焦虑感我深有体会。去年参与半导体器件仿真项目时,我也曾被这个问题困扰整整两天。本文将分享一套经过实战检验的排查方法论…...

打不开JupyterLab
因为安装某些依赖导致JupyterLab的依赖被动升级或降级,从而影响了JupyterLab的运行,此时可以SSH登录到实例,然后输入jupyter-lab命令进行确认,如果执行命令报错则说明是此问题,那么可以通过pip install jupyterlab再次…...
)
Postgresql基础实践教程(八)
⭐️⭐️⭐️⭐️⭐️ 完整数据详见 练习数据免费 ⭐️⭐️⭐️⭐️⭐️ 六十九、查找会员ID 27的向上推荐链 问题 查找会员ID 27的向上推荐链:即推荐该会员的人,以及推荐那个人的人,依此类推。返回会员ID、名字和姓氏。按会员ID降序排列。…...

通过Taotoken标准OpenAI协议实现分钟级集成现有代码
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 通过Taotoken标准OpenAI协议实现分钟级集成现有代码 1. 迁移背景与核心思路 许多开发团队在构建AI应用时,会直接使用O…...

GEP协议深度解读:AI智能体自我进化的基因工程
OpenAI 官宣全面支持MCP协议,标志着AI应用架构的"连接标准"已定。如果说MCP是AI时代的USB-C,解决了模型与工具的连接问题,那么GEP(Genome Evolution Protocol,基因组进化协议)则正在解决另一个更本质的问题——智能体的自我进化与生命周期管理。 作为下一代AI基…...

英雄联盟回放播放难题终极解决方案:ROFLPlayer完整使用指南
英雄联盟回放播放难题终极解决方案:ROFLPlayer完整使用指南 【免费下载链接】ROFL-Player (No longer supported) One stop shop utility for viewing League of Legends replays! 项目地址: https://gitcode.com/gh_mirrors/ro/ROFL-Player 还在为英雄联盟旧…...