技术笔记2023076 rBoot学习7
技术笔记2023076 rBoot学习7
继续之前的学习。
代码分析:函数find_image()
// prevent this function being placed inline with main
// to keep main's stack size as small as possible
// don't mark as static or it'll be optimised out when
// using the assembler stub
首先看一下作者给这个函数写下的注释。为了避免此函数内嵌入main函数而占用main函数的栈空间,此函数被关键字NOINLINE修饰。为了避免此函数在使用汇编存根(stub)时被优化,不能使用static来修饰此函数。
uint8_t flag;uint32_t loadAddr;uint32_t flashsize;int32_t romToBoot;uint8_t updateConfig = 0;uint8_t buffer[SECTOR_SIZE];rboot_config *romconf = (rboot_config*)buffer;rom_header *header = (rom_header*)buffer;
此函数先声明了一些变量,其中的变量buffer数组的大小是SECTOR_SIZE,也就是Flash一个扇区的大小,此处为4KB。
#ifdef BOOT_BAUDRATE// soft reset doesn't reset PLL/divider, so leave as configuredif (get_reset_reason() != REASON_SOFT_RESTART) {uart_div_modify( 0, UART_CLK_FREQ / BOOT_BAUDRATE);}
#endif
此处建议在Makefile中定义变量RBOOT_BAUDRATE,因为ESP-12F模组上电默认的74880波特率太过奇怪。此处我将变量RBOOT_BAUDRATE定义在了变量RBOOT_FW_BASE的后面,并赋值为115200。
#if defined BOOT_DELAY_MICROS && BOOT_DELAY_MICROS > 0// delay to slow boot (help see messages when debugging)ets_delay_us(BOOT_DELAY_MICROS);
#endifets_printf("\r\nrBoot v1.4.2 - richardaburton@gmail.com\r\n");
此处建议去掉rboot.h中//#define BOOT_DELAY_MICROS 2000000的注释去掉,并给宏定义设置一个合适的值,我将其设置为20000(单位为us)。这样做可以做到等待系统稳定再进行后面的操作。如果我们想设置rBoot阶段串口输出的波特率,就需要在这里等待系统串口稳定。
// read rom headerSPIRead(0, header, sizeof(rom_header));// print and get flash sizeets_printf("Flash Size: ");flag = header->flags2 >> 4;if (flag == 0) {ets_printf("4 Mbit\r\n");flashsize = 0x80000;} else if (flag == 1) {ets_printf("2 Mbit\r\n");flashsize = 0x40000;} else if (flag == 2) {ets_printf("8 Mbit\r\n");flashsize = 0x100000;} else if (flag == 3 || flag == 5) {ets_printf("16 Mbit\r\n");
#ifdef BOOT_BIG_FLASHflashsize = 0x200000;
#elseflashsize = 0x100000; // limit to 8Mbit
#endif} else if (flag == 4 || flag == 6) {ets_printf("32 Mbit\r\n");
#ifdef BOOT_BIG_FLASHflashsize = 0x400000;
#elseflashsize = 0x100000; // limit to 8Mbit
#endif} else if (flag == 8) {ets_printf("64 Mbit\r\n");
#ifdef BOOT_BIG_FLASHflashsize = 0x800000;
#elseflashsize = 0x100000; // limit to 8Mbit
#endif} else if (flag == 9) {ets_printf("128 Mbit\r\n");
#ifdef BOOT_BIG_FLASHflashsize = 0x1000000;
#elseflashsize = 0x100000; // limit to 8Mbit
#endif} else {ets_printf("unknown\r\n");// assume at least 4mbitflashsize = 0x80000;}// print spi modeets_printf("Flash Mode: ");if (header->flags1 == 0) {ets_printf("QIO\r\n");} else if (header->flags1 == 1) {ets_printf("QOUT\r\n");} else if (header->flags1 == 2) {ets_printf("DIO\r\n");} else if (header->flags1 == 3) {ets_printf("DOUT\r\n");} else {ets_printf("unknown\r\n");}// print spi speedets_printf("Flash Speed: ");flag = header->flags2 & 0x0f;if (flag == 0) ets_printf("40 MHz\r\n");else if (flag == 1) ets_printf("26.7 MHz\r\n");else if (flag == 2) ets_printf("20 MHz\r\n");else if (flag == 0x0f) ets_printf("80 MHz\r\n");else ets_printf("unknown\r\n");
这里使用SPI接口将Flash上的头部信息读出并保存在变量header中。其中包含有Flash大小、模式和速度信息。这些信息我们都可以在Makefile中设置,设置好以后会被编译进bin文件中。对于ESP-12F来说,应该这样设置:SPI_SIZE ?= 4M,SPIMODE ?= DOUT,SPI_SPEED ?= 40。
// read boot configSPIRead(BOOT_CONFIG_SECTOR * SECTOR_SIZE, buffer, SECTOR_SIZE);// fresh install or old version?if (romconf->magic != BOOT_CONFIG_MAGIC || romconf->version != BOOT_CONFIG_VERSION) {// create a default config for a standard 2 rom setupets_printf("Writing default boot config.\r\n");ets_memset(romconf, 0x00, sizeof(rboot_config));romconf->magic = BOOT_CONFIG_MAGIC;romconf->version = BOOT_CONFIG_VERSION;default_config(romconf, flashsize);// write new config sectorSPIEraseSector(BOOT_CONFIG_SECTOR);SPIWrite(BOOT_CONFIG_SECTOR * SECTOR_SIZE, buffer, SECTOR_SIZE);}// try rom selected in the config, unless overriden by gpio/temp bootromToBoot = romconf->current_rom;
这里先将Flash第一个扇区的数据读入缓冲区buffer中,而前面romconf指向了buffer。那么此时romconf就读出了rBoot的配置结构体信息。接着,我们比较magic与version是否与之前的宏定义相同。按照rBoot项目的readme中说的,我们在进行boot版本迭代时,可以通过修改version来区分新旧版本。如果此处if为真,则说明Flash中存在新的boot,此时要将Flash的第一个扇区覆盖。之后获取当前需要加载的rom的索引。
// check valid rom number// gpio/temp boots will have already validated thisif (romconf->current_rom >= romconf->count) {// if invalid rom selected try rom 0ets_printf("Invalid rom selected, defaulting to 0.\r\n");romToBoot = 0;romconf->current_rom = 0;updateConfig = 1;}// check rom is validloadAddr = check_image(romconf->roms[romToBoot]);// check we have a good romwhile (loadAddr == 0) {ets_printf("Rom %d at %x is bad.\r\n", romToBoot, romconf->roms[romToBoot]);// for normal mode try each previous rom// until we find a good one or run outupdateConfig = 1;romToBoot--;if (romToBoot < 0) romToBoot = romconf->count - 1;if (romToBoot == romconf->current_rom) {// tried them all and all are bad!ets_printf("No good rom available.\r\n");return 0;}loadAddr = check_image(romconf->roms[romToBoot]);
}
之前拿到了当前需要加载的rom的索引。如果之前拿到的索引是否超出rom总数,则认为此索引是无效的,并默认加载第一个rom。之后再去获取rom的地址。如果获取rom地址失败,则说明此rom已经被损坏了。如果所有rom都已经损坏了,那么只能直接返回0,代表没有找到image了。
// re-write config, if requiredif (updateConfig) {romconf->current_rom = romToBoot;SPIEraseSector(BOOT_CONFIG_SECTOR);SPIWrite(BOOT_CONFIG_SECTOR * SECTOR_SIZE, buffer, SECTOR_SIZE);}ets_printf("Booting rom %d at %x, load addr %x.\r\n", romToBoot, romconf->roms[romToBoot], loadAddr);// copy the loader to top of iramets_memcpy((void*)_text_addr, _text_data, _text_len);// return address to load fromreturn loadAddr;
获取到rom的地址后,将当前的rom的索引写入配置结构体中。随后将buffer写入boot所在的扇区,覆盖了之前的配置,在下次启动时将使用当前的配置。然后,将_text_data位置,长度为_text_len的数据加载到_text_addr中。最后返回rom的地址,find_image()函数就结束了。
const uint32_t entry_addr = 0x4010fcb4;const uint32_t _text_addr = 0x4010fc00;
const uint32_t _text_len = 192;
const uint8_t _text_data[] = {
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x10, 0x00, 0x00, 0x1c, 0x4b, 0x00, 0x40, 0x12, 0xc1, 0xc0, 0xc9, 0xe1, 0x8b, 0x31, 0xcd,
0x02, 0x0c, 0x84, 0xe9, 0xc1, 0xf9, 0xb1, 0x09, 0xf1, 0xd9, 0xd1, 0xc2, 0xcc, 0x08, 0x01, 0xf9,
0xff, 0xc0, 0x00, 0x00, 0xf8, 0x31, 0xe2, 0x01, 0x09, 0x86, 0x10, 0x00, 0x2d, 0x0c, 0x3d, 0x01,
0x0c, 0x84, 0x01, 0xf4, 0xff, 0xc0, 0x00, 0x00, 0x8b, 0xcc, 0x78, 0x01, 0xd8, 0x11, 0x46, 0x09,
0x00, 0x21, 0xef, 0xff, 0x5d, 0x0d, 0xd7, 0xb2, 0x02, 0x20, 0x52, 0x20, 0x2d, 0x0c, 0x3d, 0x07,
0x4d, 0x05, 0x59, 0x51, 0x79, 0x41, 0x01, 0xeb, 0xff, 0xc0, 0x00, 0x00, 0x58, 0x51, 0x78, 0x41,
0x5a, 0xcc, 0x5a, 0x77, 0x50, 0xdd, 0xc0, 0x56, 0x6d, 0xfd, 0x0b, 0x6e, 0x60, 0xe0, 0x74, 0x56,
0x9e, 0xfb, 0x08, 0xf1, 0x2d, 0x0f, 0xc8, 0xe1, 0xd8, 0xd1, 0xe8, 0xc1, 0xf8, 0xb1, 0x12, 0xc1,
0x40, 0x0d, 0xf0, 0x00, 0xfd, 0x00, 0x05, 0xf8, 0xff, 0x0d, 0x0f, 0xa0, 0x02, 0x00, 0x0d, 0xf0,
};
_text_data、_text_len、_text_addr等变量都可以在build目录下的rboot-hex2a.h中找到。令人意外的是,此文件竟然处于build目录下,这就说明它不是写出来的,而是通过某种方式生成的。
$(RBOOT_BUILD_BASE)/rboot-hex2a.h: $(RBOOT_BUILD_BASE)/rboot-stage2a.elf@echo "E2 $@"$(Q) $(ESPTOOL2) -quiet -header $< $@ .text
通过分析Makefile,我们可以看到,rboot-hex2a.h依赖于rboot-stage2a.elf,并通过esptool2生成的。关于生成rboot-hex2a.h的具体过程,可以参考这篇文章:ESP8266 Bootloader开源代码解析之rboot(一)。
相关文章:

技术笔记2023076 rBoot学习7
技术笔记2023076 rBoot学习7 继续之前的学习。 代码分析:函数find_image() // prevent this function being placed inline with main // to keep mains stack size as small as possible // dont mark as static or itll be optimised out when // using the ass…...

收藏这6个抠图工具,一键抠图不用愁!
在图片编辑工作中,抠图是设计师常用的操作。随着设计工具的不断增加,抠图操作摆脱了过去繁琐的操作步骤,几乎可以一键完成。今天本文将为大家介绍6个好用的抠图工具,一起来看看吧! 1、皮卡智能抠图 皮卡智能抠图是一…...
四,Eureka 第四章
2.1.3 增加依赖 <!--添加依赖--><dependencies><!--Eureka Server--><dependency><groupId>org.springframework.cloud</groupId><artifactId>spring-cloud-starter-netflix-eureka-server</artifactId></dependency>&l…...
k8s常见的资源对象使用
目录 一、kubernetes内置资源对象 1.1、kubernetes内置资源对象介绍 1.2、kubernetes资源对象操作命令 二、job与cronjob计划任务 2.1、job计划任务 2.2、cronjob计划任务 三、RC/RS副本控制器 3.1、RC副本控制器 3.2、RS副本控制器 3.3、RS更新pod 四、Deployment副…...
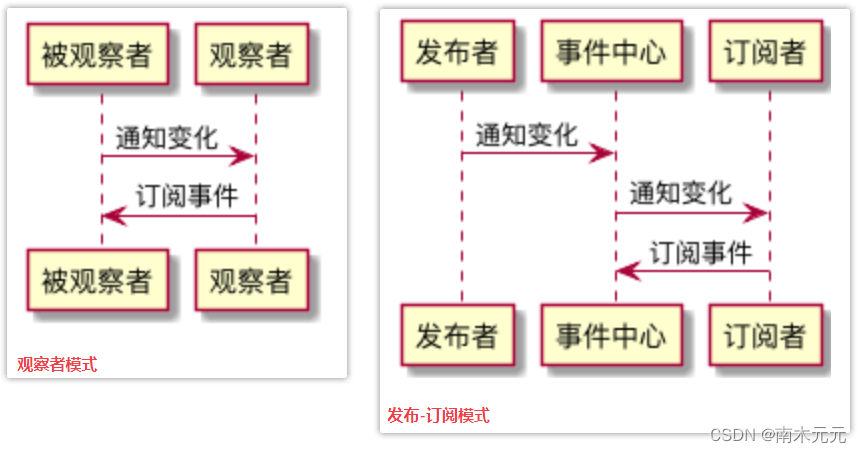
JavaScript 简单实现观察者模式和发布订阅模式
JavaScript 简单实现观察者模式和发布订阅模式 1. 观察者模式1.1 如何理解1.2 代码实现 2. 发布订阅模式2.1 如何理解2.2 代码实现 1. 观察者模式 1.1 如何理解 概念:观察者模式定义对象间的一种一对多的依赖关系,当一个对象的状态发生改变时ÿ…...
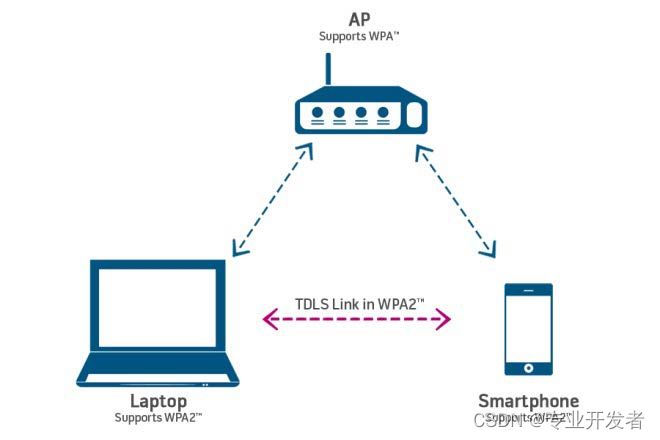
高通WLAN框架学习(37)-- TDLS(Tunneled Direct Link Setup)通道直接链路建立
一 TDLS概述 隧道直连设置(TDLS)基于IEEE 802.11z-2010IEEE标准802.11z标准(无线局域网介质访问控制(MAC)和物理层(PHY)规范。 TDLS允许与同一AP关联的设备之间建立直接链路。Wi-Fi Direct允许设备之间直接连接,而不需要AP。Wi-Fi联盟认证可用于IEEE 802.11a和802.11g设备的T…...

高算力AI模组前沿应用:基于ARM架构的SoC阵列式服务器
本期我们带来高算力AI模组前沿应用,基于ARM架构的SoC阵列式服务器相关内容。澎湃算力、创新架构、异构计算,有望成为未来信息化社会的智能算力底座。 ▌性能优势AI驱动,ARM架构服务器加速渗透 一直以来,基于ARM架构的各类处理器…...

老年公寓人员定位管理系统:提升安全与关怀的智能解决方案
老年公寓作为提供安全居住环境和关怀服务的重要场所,面临着人员管理和安全控制的挑战。为了解决这些问题,老年公寓人员定位管理系统应运而生。基于为提供全面的安全管理和个性化关怀服务,华安联大便通过老年公寓人员定位管理系统的技术原理、…...

每日一题之两个字符串的删除操作
题目链接 给定两个单词 word1 和 word2 ,返回使得 word1 和 word2 **相同所需的最小步数。 每步 可以删除任意一个字符串中的一个字符。 示例 1: 输入: word1 "sea", word2 "eat" 输出: 2 解释: 第一步将 "sea" 变…...
nacos安装与基础配置
源码 https://github.com/alibaba/nacos https://gitee.com/mirrors/Nacos 编译 git clone https://github.com/alibaba/nacos.git cd nacos/ mvn -Prelease-nacos -Dmaven.test.skiptrue clean install -U ls -al distribution/target/// change the $version to your ac…...
GitHub Copilot:让开发编程变得像说话一样简单
引用: 人类天生就梦想、创造、创新。但今天,我们花太多时间被繁重的工作所消耗,花在消耗我们时间、创造力和精力的任务上。为了重新连接我们工作的灵魂,我们不仅需要一种更好的方式来做同样的事情,更需要一种全新的工…...

并发编程中锁的优化
在 Java 并发编程中,锁是一种常用的同步机制,用于控制对共享资源的访问。使用锁可以确保多个线程之间的互斥访问,避免数据竞争和并发问题。 然而,锁的使用可能会带来一定的性能开销,特别是在高并发场景下。 为了优化…...
笔试题:统计字符串中某字符串在其出现的字符个数
笔试题:统计字符串中某一子串的字符个数:例如字符串aabbcd,有aabb:4,ab:2 哈哈,这道题是小编面试音视频龙头企业的笔试题,以下是我写的代码:如果有错误,希望可以指正!!! 解题思路:利用双指针i和…...

Java NIO Files类读取文件流方式详解
Java NIO Files类读取文件流方式详解 Files类原理概述 java.nio.file.Files是Java标准库提供的一个工具类,用于操作文件和目录。它提供了一系列静态方法,可以用于创建、复制、删除、移动、重命名、读取、写入文件和目录等常见的文件系统操作。同时&…...
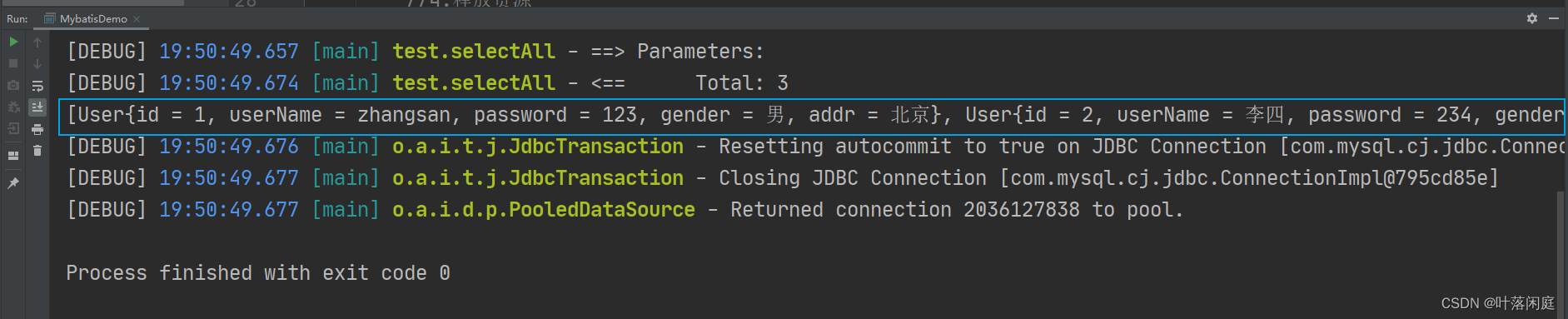
Mybatis快速入门,Mybatis的核心配置文件
Mybatis快速入门 一、Mybatis简介1.1Mybatis简化JDBC 二、Mybatis快速入门2.1创建user表,添加数据2.2创建模块,导入坐标2.3编写Mybatis核心配置文件 --> 替换连接信息,解决硬编码问题2.4编写SQL映射文件 --> 统一管理sql语句࿰…...

go语言中defer执行顺序
defer 执行顺序和调用顺序相反,类似于栈后进先出。 defer在 return 之后执行,但在函数推出之前,defer可以修改返回值。 func test() int {i : 0defer func() {fmt.Println("defer1")}()defer func() {i 1fmt.Println("defe…...

webpack xxx is not a constructor
环境 webpack5.88.2 vue-router 按需引入 原因 模块循环引用导致 有A B C三个模块 A B模块import C 中导出的class c又依赖B 中Class 的方法 B 又依赖C中的class 此时会导致import 的 C 为undefined...
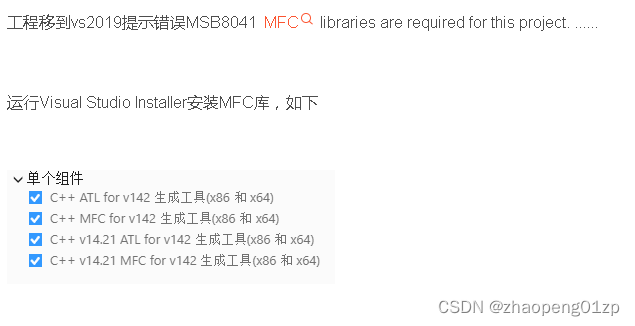
安装支持vs2019的MFC(解决MSBuild 错误 MSB8041、MSB8042)
安装支持MFC的vs2019(解决MSBuild 错误 MSB8041、MSB8042) 常用安装选项解决MSBuild 错误 常用安装选项 解决MSBuild 错误 安装上述勾选内容后,即可解决MSBuild 错误 MSB8041 MSB8041:此项目需要 MFC/ATL 库。 https://learn.mic…...
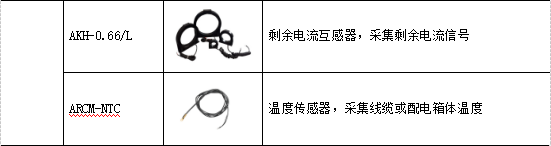
校园电气安全风险分析及预防措施 安科瑞 许敏
摘要:校园属于人员密集场所,若安全风险排查、管控不到位,可能导致安全事故发生,造成严重事故后果。校园电气设备设施引起的电气火灾和触电等事故,是构成校园安全威胁之一,笔者通过对校园发生的电气安全事故案例原因分析…...
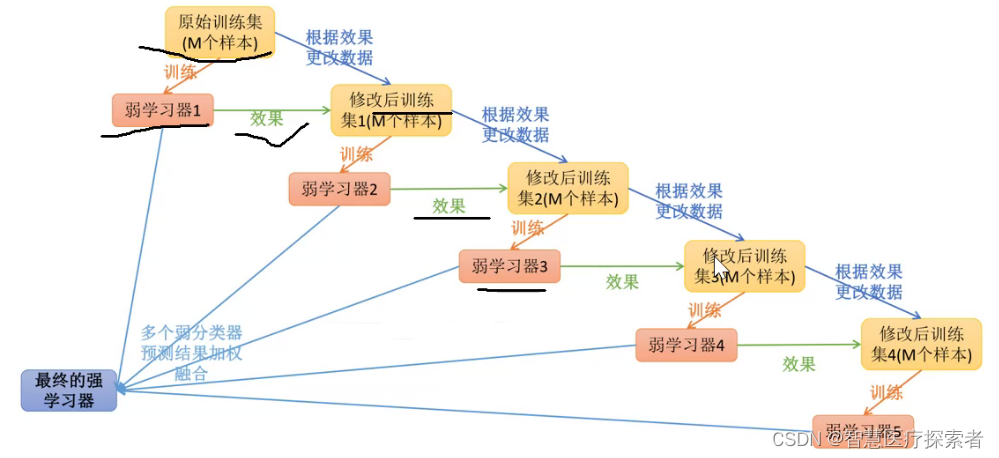
机器学习之十大经典算法
机器学习算法是计算机科学和人工智能领域的关键组成部分,它们用于从数据中学习模式并作出预测或做出决策。本文将为大家介绍十大经典机器学习算法,其中包括了线性回归、逻辑回归、支持向量机、朴素贝叶斯、决策树等算法,每种算法都在特定的领…...

Stitches项目架构分析:RequireJS模块化设计与Grunt构建流程完全指南 [特殊字符]
Stitches项目架构分析:RequireJS模块化设计与Grunt构建流程完全指南 🚀 【免费下载链接】stitches HTML5 Sprite Sheet Generator 项目地址: https://gitcode.com/gh_mirrors/sti/stitches Stitches是一个基于HTML5的雪碧图生成器,它采…...

服务器日志分析实战:用Python追踪HTTP 404错误并可视化异常频率
作为一名爬虫开发者或网站运维人员,服务器日志就像飞机的“黑匣子”——它记录了每个请求的来龙去脉。而404错误(页面未找到)尤其值得关注:它可能是用户输错了网址,可能是你爬虫的URL构造逻辑有漏洞,也可能是网站改版后旧的链接失效了。更严重的是,大量突然涌出的404请求…...
)
放弃编码器!纯靠MPU6050和PID算法,手把手教你用TT马达实现平衡小车稳定控制(STM32F103C8T6实战)
纯MPU6050STM32F103的TT马达平衡车实战:无编码器PID控制全解析当大多数平衡小车方案都在强调编码器对速度反馈的不可或缺性时,我们决定挑战一个更极简的配置:仅用5美元的TT马达、9轴的MPU6050和STM32F103C8T6最小系统板,完全舍弃编…...

FM3773 低功耗离线式恒流/恒压 PSR 控制器
概述 FM3773 是一种高性能的交流/直流用于电池充电器和适配器的电源控制器,内置 850V 功率三极管。该设备采用脉冲频率调制(PFM)的方法来建立非连续导通模式(DCM)反激式电源。 FM3773 提供精确的恒定电压,恒…...

Sangfor文件夹可以删除吗?【图文讲解】深信服文件夹残留清理?如何彻底删除深信服?Sangfor文件夹是什么?
(1)问题背景打开C盘,突然冒出个Sangfor 文件夹,占用好几个 GB 空间,想删又不敢删,怕删坏系统、断网崩溃;上网一查,说法五花八门,有人说是病毒,有人说是办公软…...

Unity iOS构建报错SDK version is 0的根因与精准修复
1. 这个报错不是Unity在“发脾气”,而是工程配置在“装死”刚接手一个老项目,打开Unity编辑器,点Build Settings准备打包iOS,结果弹出一行红字:“SDK version is 0, cannot build”。我第一反应是——这什么鬼…...

机器学习的最佳实践:这7个原则让你的模型更稳定
对于软件测试从业者而言,机器学习技术正在快速融入测试流程:从自动化测试用例生成、缺陷预测到测试环境异常检测,机器学习模型的稳定性直接决定了测试结果的可靠性——如果模型在测试环境波动、输入数据变化时性能骤降,不仅无法提…...
)
ArduPilot飞行模式实战:从代码角度看Stabilize、Acro、Loiter模式如何切换(附避坑指南)
ArduPilot飞行模式深度解析:从状态机到实战避坑指南 在开源飞控领域,ArduPilot以其强大的飞行模式系统著称。不同于普通用户只需了解模式功能,开发者更需要掌握模式切换的底层机制——这直接关系到飞行安全与二次开发效率。本文将带您深入Sta…...

Visual C++运行库一键安装指南:彻底解决Windows应用依赖问题
Visual C运行库一键安装指南:彻底解决Windows应用依赖问题 【免费下载链接】vcredist AIO Repack for latest Microsoft Visual C Redistributable Runtimes 项目地址: https://gitcode.com/gh_mirrors/vc/vcredist 你是否曾经遇到过打开软件时弹出"缺少…...

Safe Exam Browser虚拟机绕过实战:深度解析与安全研究指南
Safe Exam Browser虚拟机绕过实战:深度解析与安全研究指南 【免费下载链接】safe-exam-browser-bypass A VM and display detection bypass for SEB. 项目地址: https://gitcode.com/gh_mirrors/sa/safe-exam-browser-bypass 在数字化教育快速发展的今天&…...