目标检测识别——大恒(DaHeng)相机操作与控制编程
文章目录
- 引言
- 正文
- 相关开发库的介绍
- 编程准备
- 配置引用头文件GalaxyIncludes.h
- 配置lib文件
- 具体编程过程
- 初始化和反初始化
- 枚举设备
- 开关设备
- 属性控制
- 属性控制器种类
- 图像采集控制和图像处理
- 采单帧
- 回调采集
- 总结
引言
- 在做老师的横向项目时,需要用大恒相机,需要将他的相机控制接入写的程序中,但是对于他的SDK并不了解,所以就好好看了他的SDK文件,并按照他的开发手册写了一个小的demo。
正文
相关开发库的介绍
- 在使用别人的代码过程中,有很多库自己都看不懂,这里做一下记录
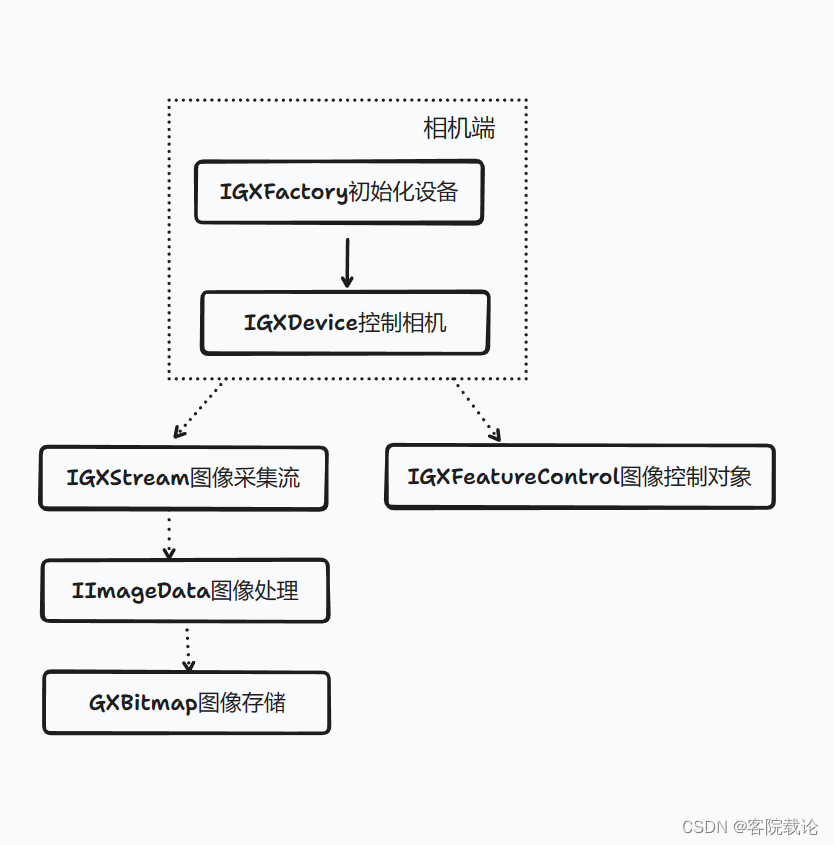
- GxIAPICPPEx.dll:封装过后的通用并且统一的编程接口
- IGXFactory:初始化接口库,枚举设备,打开设备
- IGXDevice:设备对象,以此对象为入口进行属性控制、图像采集,获取相机事件等。
- IGXStream:流对象,从IGXDevice获得,专门负责图像采集相关职能。
- IGXFeatureControl:属性控制对象,分别从IGXDevice和IGXStream获得属性控制对象,
- IImageData:回调采集和采单帧的图像结构体,包括采集输出结果:图像buffer和图像信息等,还自带图像格式转换、图像增强的功能
- GXBitmap:负责图像的显示和存储功能,具体见示例程序
编程准备
- 首先需要下载安装对应设备的SDK文件,具体链接,相关SDK软件下载
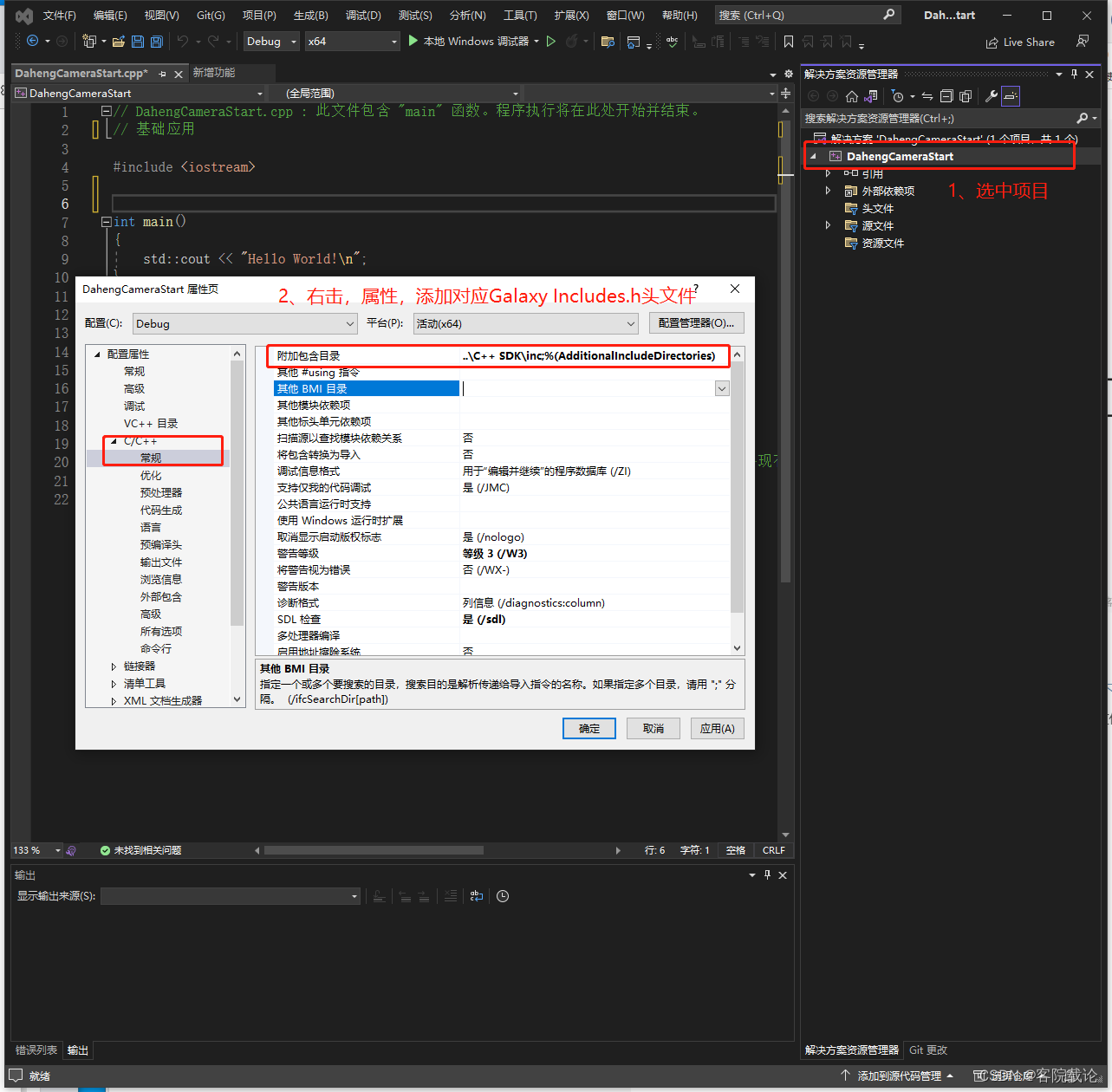
- 这里是结合VS 2022进行打开,如何配置库,如何指定,相关的头文件。
- 在编程之前,需要配置好指定的项目文件
- 配置好所需要引用的头文件,Galaxyincludes.h头文件
- 设置需要引用的库文件,GxlAPICPPEx.lib库文件
配置引用头文件GalaxyIncludes.h
- 这里安装了SDK的话,需要指定你所运行的项目的配置文件,这里有两种写法,正常来说应该把对应的SDK复制在项目所在的文件里,这样项目的可移植性就比较强。但是我这里已经在工控机上进行 配置了,就直接写了绝对路径。
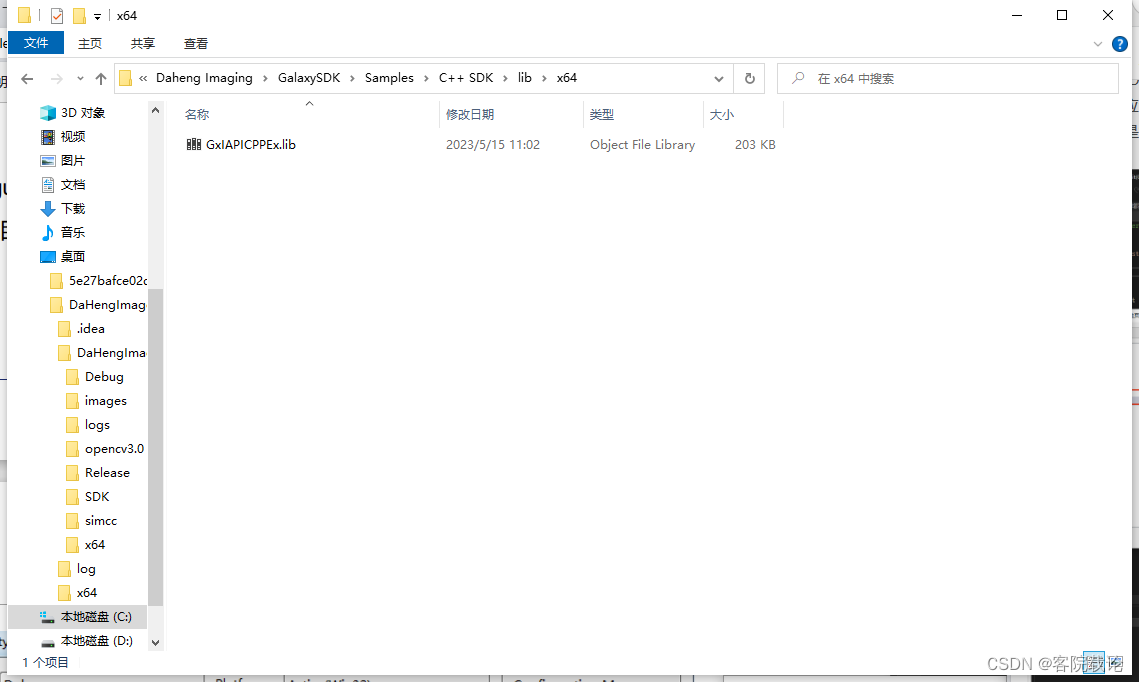
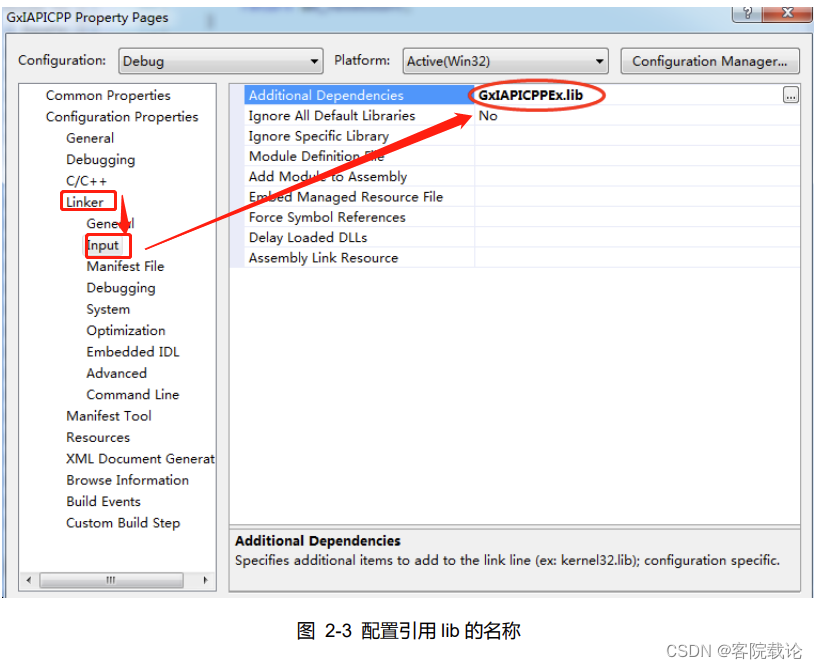
配置lib文件
-
这里必须配置GxIAPICPPEx.lib静态库文件,这个库是大恒相机对外编程的统一接口。接受一个新的项目文件,一般来说,配置文件里面有,但是属性里面没有配置,踩过坑之后发现需要重新配置。
-
找到GxlAPICPPEx.lib的路径
-
设置相关的配置文件
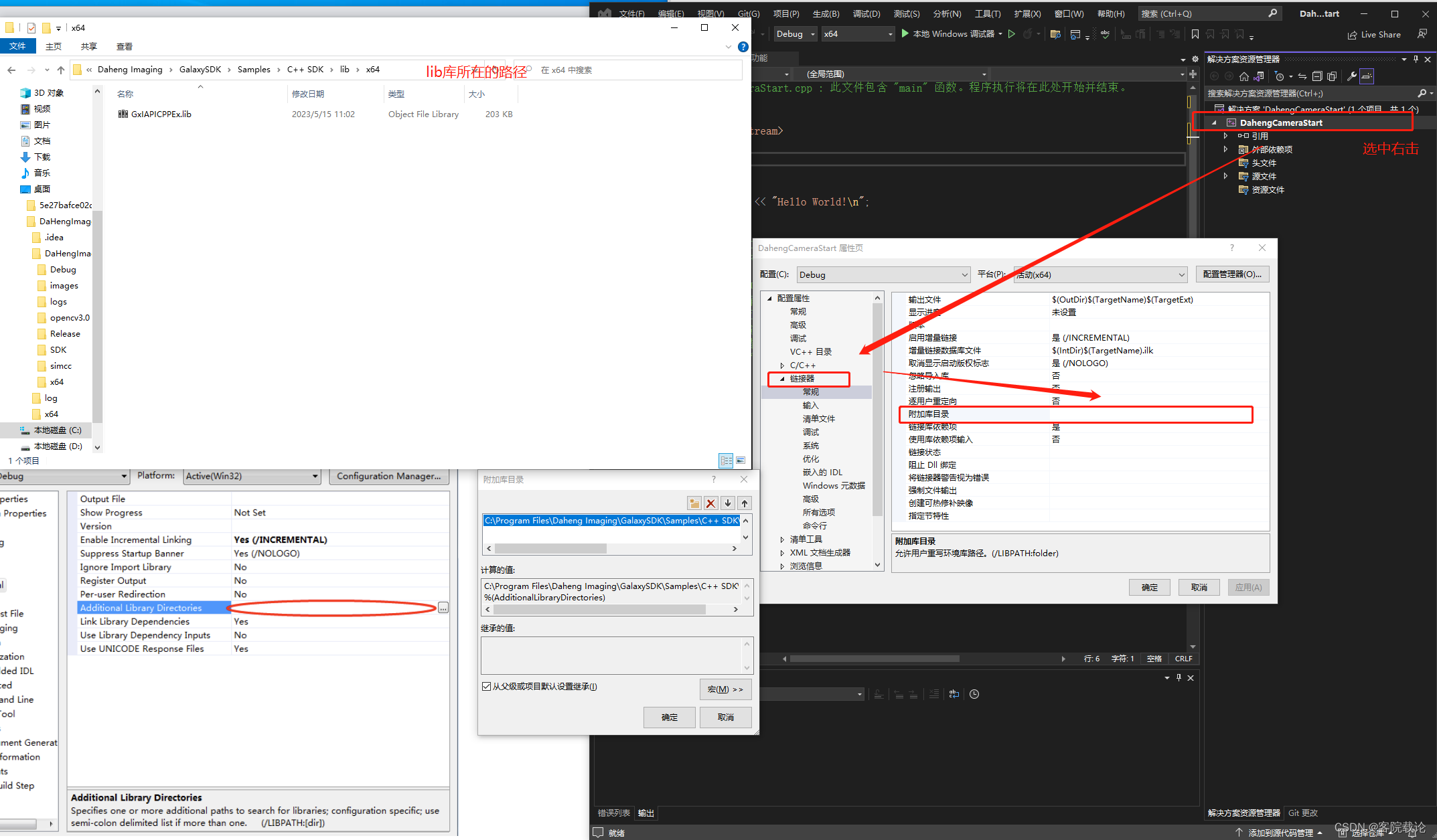
- 指定对应目录下方的静态库
具体编程过程
- 当前章节,主要是涉及到如何调用相关的开发库,对相机进行初始化,并对相机进行控制,同时保存对应的图片。
- 具体操作如下
- 初始化获取相关的资源, 反初始化释放所有的资源
- 枚举设备,获取所有资源
- 开关设备
初始化和反初始化
- 在调用GxlAPICPPEx.lib之前,相机必须要进行初始化,初始化是通过IGXFactory进行初始化的。
#include <iostream>
#include "IGXFactory.h"
#include "GalaxyException.h"using namespace std;int main()
{try {// 初始化相机实例IGXFactory::GetInstance().Init();}catch (CGalaxyException&e) {cout << "error code " << e.GetErrorCode() << endl;cout << "error description" << e.what() << endl;}std::cout << "Hello World!\n";
}
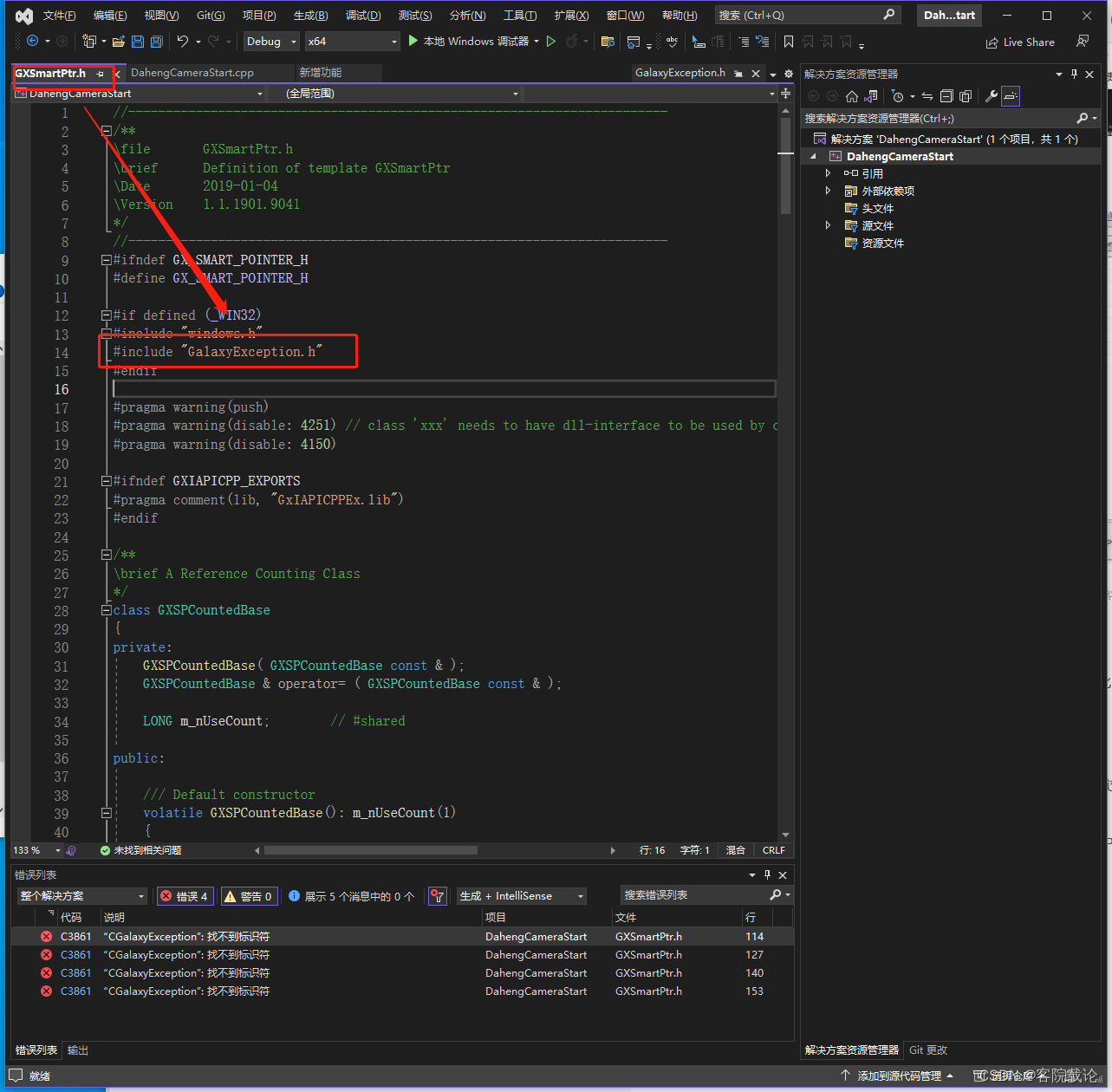
- 在初始化中遇到CGalaxyException找不到标识符的问题,解决办法如下,在vs中找到异常,会跳转到GXSmartPtr.h头文件中,添加
#include “GalaxyException.h”,具体如下
-
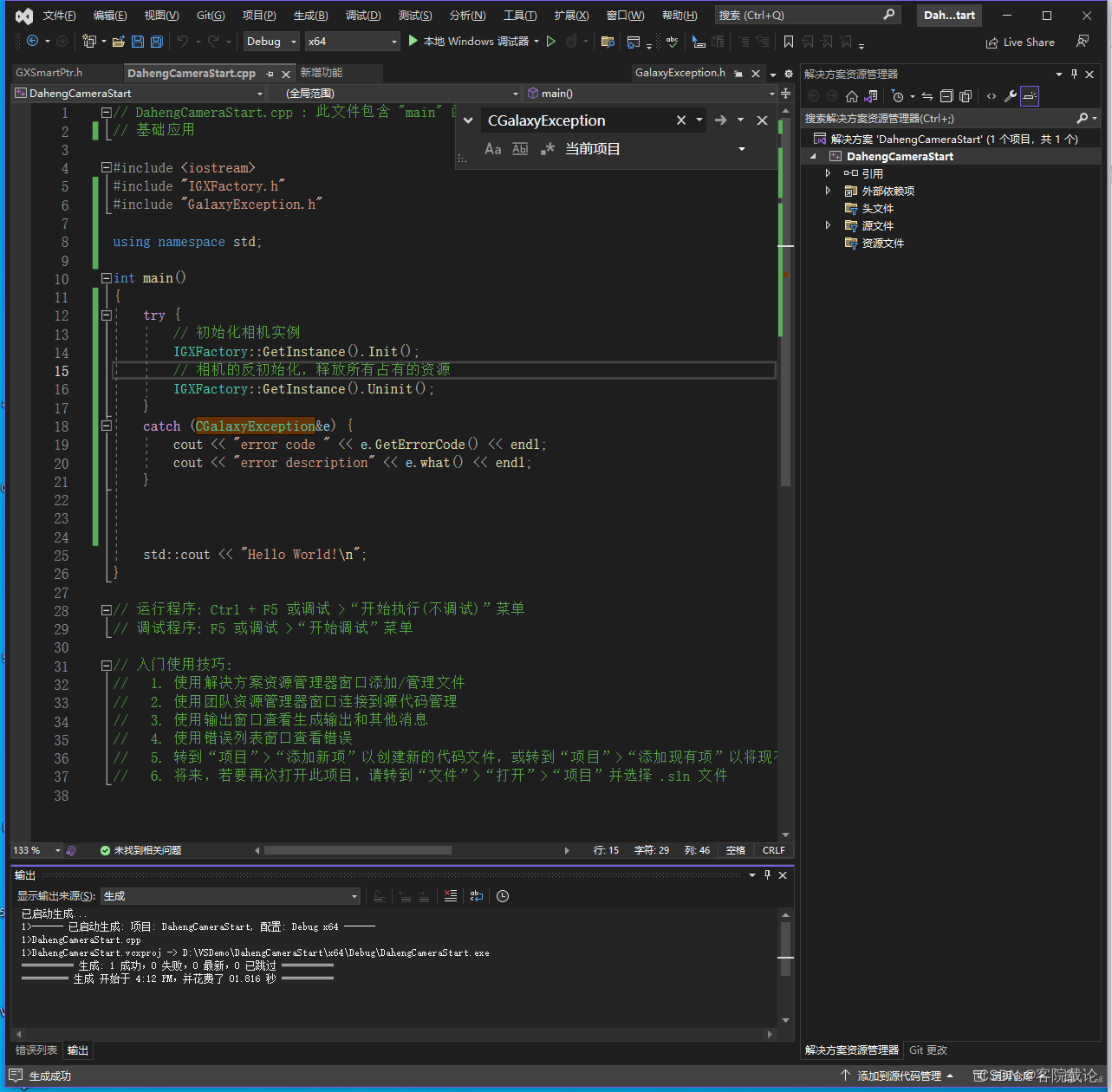
加上这句之后,后续就没有运行问题了,运行截图如下
-
在调用相机的进程退出之后,必须要进行反初始化,释放GxlAPICPPEx库函数调用的所有资源。
// DahengCameraStart.cpp : 此文件包含 "main" 函数。程序执行将在此处开始并结束。
// 基础应用#include <iostream>
#include "IGXFactory.h"
#include "GalaxyException.h"using namespace std;int main()
{try {// 初始化相机实例IGXFactory::GetInstance().Init();// 相机的反初始化,释放所有占有的资源IGXFactory::GetInstance().Uninit();}catch (CGalaxyException&e) {cout << "error code " << e.GetErrorCode() << endl;cout << "error description" << e.what() << endl;}std::cout << "Hello World!\n";
}
枚举设备
- 用户通过枚举设备来获取当前计算机中,可以使用的设备,并进行相关的调用
- 用户通过调用 IGXFactory::GetInstance().UpdateDeviceList 枚举当前所有可用设备,获取一个设备信息列表,列表类型为 GxIAPICPP::gxdeviceinfo_vector。
- 具体代码如下
int main()
{try {// 初始化相机实例IGXFactory::GetInstance().Init();// 使用GxIAPICPP列表类保存相关的信息GxIAPICPP::gxdeviceinfo_vector vectorDeviceInfo;// 第一个参数是扫描的时长,第二个参数是将获取的信息保存到对应的列表中IGXFactory::GetInstance().UpdateDeviceList(10000,vectorDeviceInfo);cout << "the camera num:" << vectorDeviceInfo.size() << endl;for (int i = 0; i < vectorDeviceInfo.size(); i++) {cout << vectorDeviceInfo[i].GetVendorName() << endl;cout << vectorDeviceInfo[i].GetModelName() << endl;}// 相机的反初始化,释放所有占有的资源IGXFactory::GetInstance().Uninit();}catch (CGalaxyException&e) {cout << "error code " << e.GetErrorCode() << endl;cout << "error description" << e.what() << endl;}std::cout << "Hello World!\n";
}
开关设备
- 控制设备关闭或者打开,由于这里使用的是ME2P-1230-23U3M/C相机,是通过USB3.0接口进行控制,并不是千兆网相机,所以MAC地址和IP地址都是空的,

- 控制相机关闭打开总共有四种方式
-
- SN 为设备序列号。
-
- UserID 为用户自定义名称(不支持 UserID 的设备此项为空字符串)。
-
- MAC 为设备 MAC 地址(非千兆网相机此项为空字符串)。
-
- IP 为设备 IP 地址(非千兆网相机此项为空字符串)。
-
- 打开对应函数的对应函数接口是
- IGXFactory::GetInstance().OpenDeviceBySN
- IGXFactory::GetInstance().OpenDeviceByUserID
- IGXFactory::GetInstance().OpenDeviceByMAC
- IGXFactory::GetInstance().OpenDeviceByIP
- 关闭对应相机的函数如下
//关闭设备之后不允许再调用 IDevice 以及设备的 IFeatureControl、IStream 的所有接口
objDevicePtr->Close();
- 最终的代码,我手上还没有相机,老师就给我代码让我先看一下,这里参考的是官方的参考手册代码
GxIAPICPP::gxdeviceinfo_vector vectorDeviceInfo;
IGXFactory::GetInstance().UpdateDeviceList(1000, vectorDeviceInfo);
if (vectorDeviceInfo.size()> 0)
{
//打开链表中的第一个设备
CGXDevicePointerobjDevicePtr;
GxIAPICPP::gxstringstrSN = vectorDeviceInfo[0].GetSN();
GxIAPICPP::gxstringstrUserID = vectorDeviceInfo[0].GetUserID();
GxIAPICPP::gxstringstrMAC = vectorDeviceInfo[0].GetMAC();
GxIAPICPP::gxstringstrIP = vectorDeviceInfo[0].GetIP();
//用户也可以直接指定打开的设备信息,下面代码中使用的信息为伪造信息,用户以实际设备为准
//GxIAPICPP::gxstring strSN = "GA0140100002";
//GxIAPICPP::gxstring strUserID = "MyUserName";
//GxIAPICPP::gxstring strMAC = "A1-0B-32-7C-6F-81";
//GxIAPICPP::gxstring strIP = "192.168.0.100";
objDevicePtr = IGXFactory::GetInstance().OpenDeviceBySN(strSN, GX_ACCESS_EXCLUSIVE);
//objDevicePtr = IGXFactory::GetInstance().OpenDeviceByUserID(strUserID,
//GX_ACCESS_EXCLUSIVE);
//objDevicePtr = IGXFactory::GetInstance().OpenDeviceByMAC(strMAC,
//GX_ACCESS_EXCLUSIVE);
//objDevicePtr = IGXFactory::GetInstance().OpenDeviceByIP(strIP,
//GX_ACCESS_EXCLUSIVE);
}
属性控制
- 这部分东西比较琐碎,并且不是重点,就简单写一下
属性控制器种类
- 主要是通过IGXFeatureControl进行属性控制,分别是有两类控制对象,分别是设备Device和流Stream
-
- IGXFeatureControl IGXDevice::GetRemoteFeatureControl //包含主要设备信息,比如宽高、曝光增益等,一般用户主要使用此属性控制器即可。
-
- IGXFeatureControl IGXDevice::GetFeatureControl //包含一些本地属性,不同类型的设备具备的功能也不一样。
-
- IGXFeatureControl IGXStream::GetFeatureControl //流对象属性控制器,关于采集控制和采集数据统计的属性访问控制器。
-
图像采集控制和图像处理
采单帧
回调采集
总结
- 目前没有设备,就不看他的说明文档了,等我手里 有具体的相机了,再继续开始写一些控制相机的基础代码了,这里直接去看老师给的代码了, 不往外放了。
相关文章:
目标检测识别——大恒(DaHeng)相机操作与控制编程
文章目录 引言正文相关开发库的介绍编程准备配置引用头文件GalaxyIncludes.h配置lib文件 具体编程过程初始化和反初始化枚举设备开关设备 属性控制属性控制器种类 图像采集控制和图像处理采单帧回调采集 总结 引言 在做老师的横向项目时,需要用大恒相机,…...
国标GB28181视频监控平台EasyGBS视频无法播放,抓包返回ICMP是什么原因?
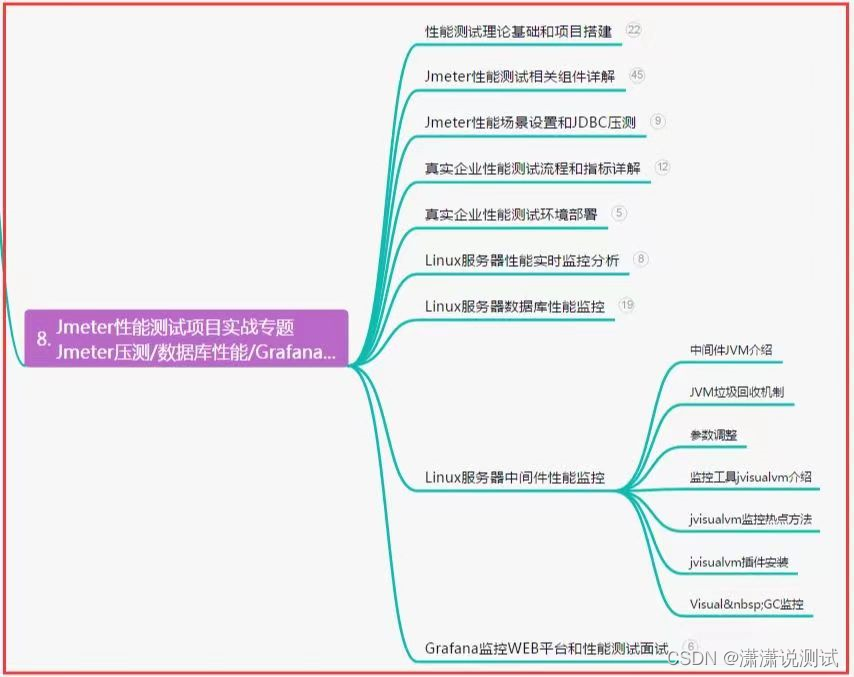
国标GB28181视频平台EasyGBS是基于国标GB/T28181协议的行业内安防视频流媒体能力平台,可实现的视频功能包括:实时监控直播、录像、检索与回看、语音对讲、云存储、告警、平台级联等功能。国标GB28181视频监控平台部署简单、可拓展性强,支持将…...

如何正确使用npm常用命令
npm常用命令: 官方文档:CLI Commands | npm Docs 1. npm -v:查看 npm 版本 2. npm init:初始化后会出现一个 Package.json 配置文件,可以在后面加上 -y,快速跳到问答界面 3. npm install:会…...

无人机影像配准并发布(共线方程)
无人机影像 DEM 计算四个角点坐标(刚性变换) 像空间坐标(x,y,-f) 像空间坐标畸变纠正 deltax,deltay 已知(x,y),求解(X,Y, Z)或者(Lat,Lon) 这里的Z是DEM上获取的坐标和Zs为相机坐标的高程,如果均为已…...

openGauss学习笔记-23 openGauss 简单数据管理-时间/日期函数和操作符
文章目录 openGauss学习笔记-23 openGauss 简单数据管理-时间/日期函数和操作符23.1 时间日期操作符23.2 时间/日期函数23.3 TIMESTAMPDIFF23.4 EXTRACT23.5 date_part openGauss学习笔记-23 openGauss 简单数据管理-时间/日期函数和操作符 23.1 时间日期操作符 用户在使用时…...
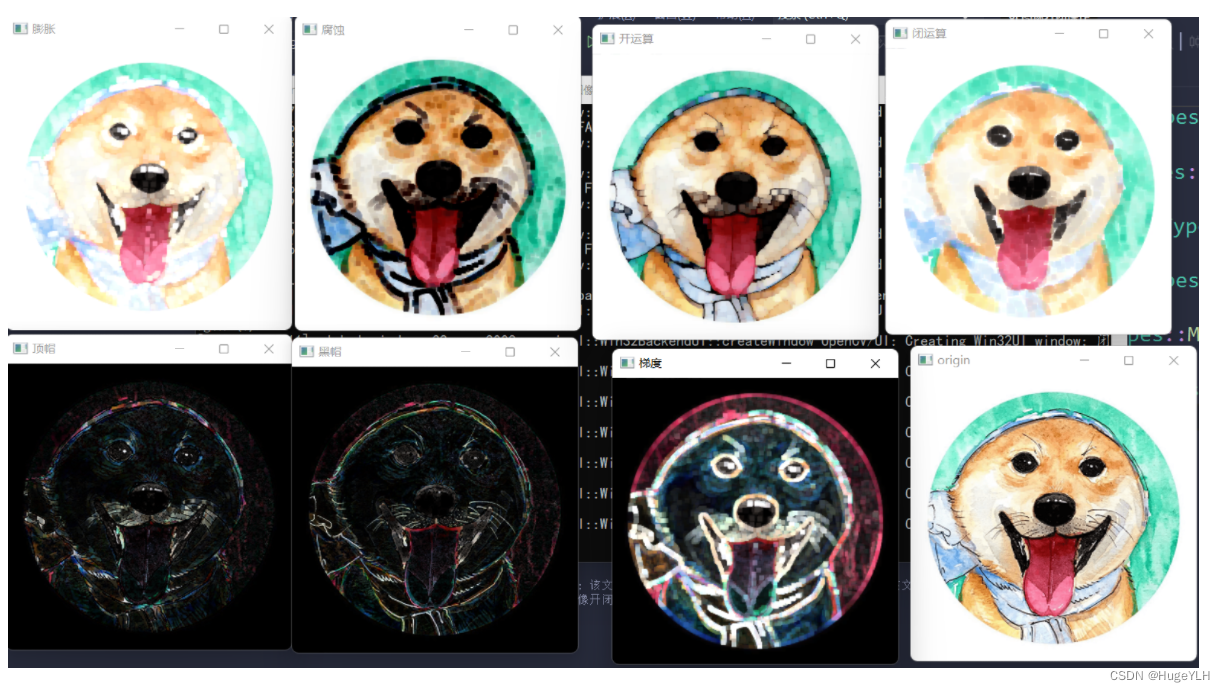
C++OpenCV(7):图像形态学基础操作
🔆 文章首发于我的个人博客:欢迎大佬们来逛逛 🔆 OpenCV项目地址及源代码:点击这里 文章目录 膨胀与腐蚀形态学基础 膨胀与腐蚀 膨胀与腐蚀是数学形态学在图像处理中最基础的操作。 膨胀操作是取每个位置领域内最大值࿰…...
Appium+python自动化(二十二)- 控件坐标获取(超详解)
简介 有些小伙伴或者是童鞋可能会好奇会问上一篇中的那个monkey脚本里的坐标点是如何获取的,不是自己随便蒙的猜的,或者是自己用目光或者是尺子量出来的吧,答案当然是:NO。获取控件坐标点的方式这里宏哥给小伙伴们分享和讲解三种方…...
Tensorflow benchmark 实操指南
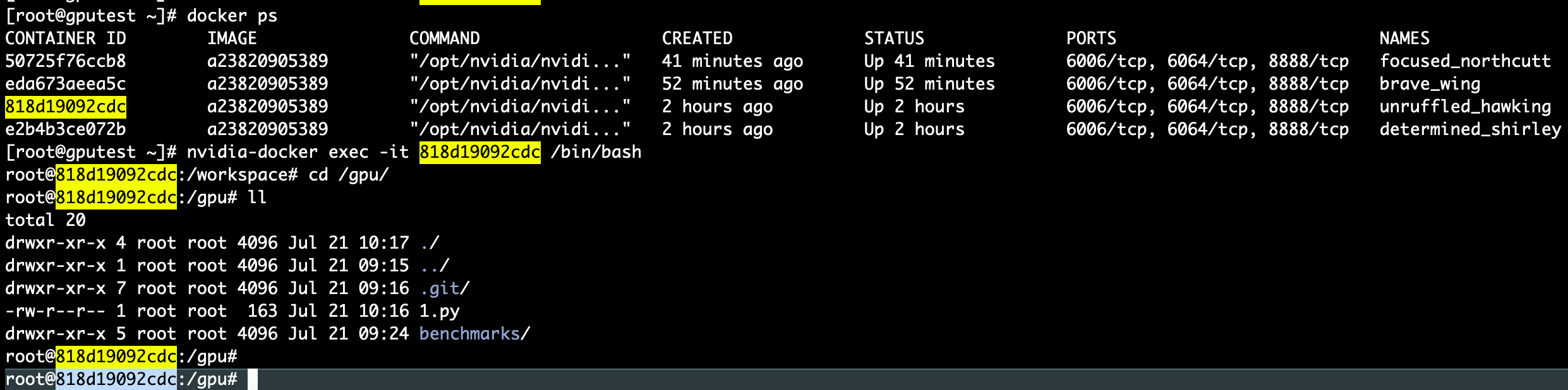
环境搭建篇见环境搭建-CentOS7下Nvidia Docker容器基于TensorFlow1.15测试GPU_东方狱兔的博客-CSDN博客 1. 下载Benchmarks源码 从 TensorFlow 的 Github 仓库上下载 TensorFlow Benchmarks,可以通过以下命令来下载 https://github.com/tensorflow/benchmarks 我…...

【linux】调试工具介绍
文章目录 前言一、kdb二、ftrace三、gdb 前言 在Linux内核调试过程中,可以使用各种工具和技术来诊断和解决问题。以下是一些常用的Linux内核调试方法: printk:printk是Linux内核中的打印函数,可以在代码中插入打印语句来输出调试…...

2.获取DOM元素
获取DOM元素就是利用JS选择页面中的标签元素 2.1 根据CSS选择器来获取DOM元素(重点) 2.1.1选择匹配的第一个元素 语法: document.querySelector( css选择器 )参数: 包含一个或多个有效的CSS选择器 字符串 返回值: CSS选择器匹配的第一个元素,一个HTMLElement对象…...

flask中redirect、url_for、endpoint介绍
flask中redirect、url_for、endpoint介绍 redirect 在 Flask 中,redirect() 是一个非常有用的函数,可以使服务器发送一个HTTP响应,指示客户端(通常是浏览器)自动导航到新的 URL。基本上,它是用来重定向用…...

《MySQL》第十二篇 数据类型
目录 一. 整数类型二. 浮点类型三. 日期和时间类型四. 字符串类型五. 枚举值类型六. 二进制类型七. 小结 MySQL 支持多种数据类型,学习好数据类型,才能更好的学习 MySQL 表的设计,让表的设计更加合理。 一. 整数类型 类型大小SIGNED(有符号)…...

Python与OpenCV环境中,借助SIFT、单应性、KNN以及Ransac技术进行实现的图像拼接算法详细解析及应用
一、引言 在当今数字化时代,图像处理技术的重要性不言而喻。它在无人驾驶、计算机视觉、人脸识别等领域发挥着关键作用。作为图像处理的一个重要部分,图像拼接算法是实现广阔视野图像的重要手段。今天我们将会讲解在Python和OpenCV环境下,如何使用SIFT、单应性、KNN以及Ran…...

苍穹外卖Day01项目日志
1.软件开发流程和人员分工是怎样的? 软件开发流程 一个软件是怎么被开发出来的? 需求分析 先得知道软件定位人群、用户群体、有什么功能、要实现什么效果等。 需要得到需求规格说明书、产品原型。 需求规格说明书 其中前后端工程师要关注的就是产品原…...
)
Netty学习(二)
文章目录 二. Netty 入门1. 概述1.1 Netty 是什么?1.2 Netty 的作者1.3 Netty 的地位1.4 Netty 的优势 2. Hello World2.1 目标加入依赖 2.2 服务器端2.3 客户端2.4 流程梳理课堂示例服务端客户端 分析提示(重要) 3. 组件3.1 EventLoop事件循…...
ReactRouterv5在BrowserRouter和HashRouter模式下对location.state的支持
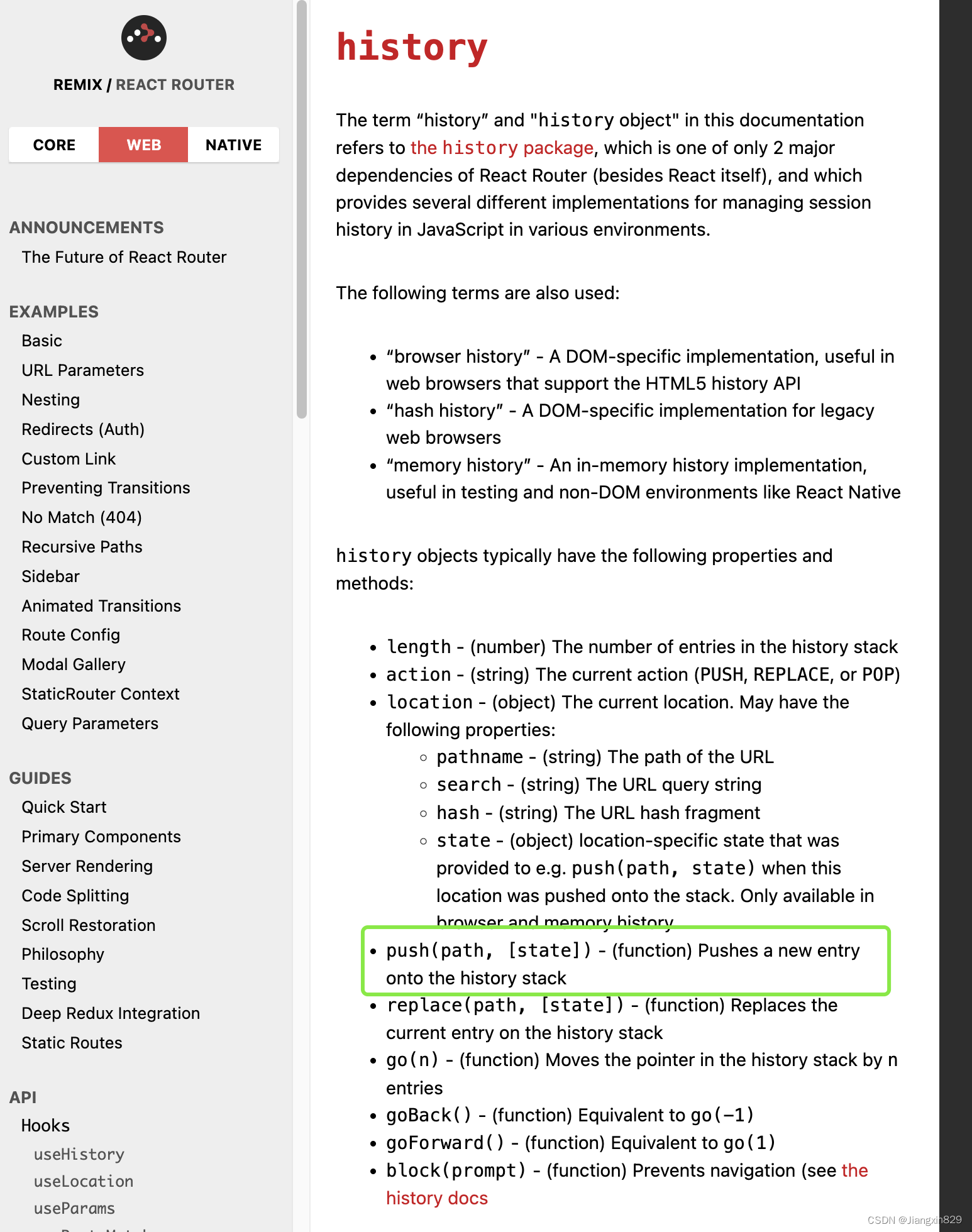
结论:HashRouter不支持location.state 文档:ReactRouter v5 从文档可看到history.push()方法支持2个参数:path, [state] state即是location.state,常用于隐式地传递状态参数 但文档未提的是,仅适用于BrowserRouter&am…...
运动设置命令Motion Setup Commands)
Aerotech系列文章(3)运动设置命令Motion Setup Commands
1.运动设置命令Motion Setup Commands 斜坡类型: 直线,S曲线,与正弦曲线 Enumerator: RAMPTYPE_Linear Linear-based ramp type. RAMPTYPE_Scurve S-curve-based ramp type. RAMPTYPE_Sine Sine-based ramp type. 函数原型&a…...

线性神经网络——softmax 回归随笔【深度学习】【PyTorch】【d2l】
文章目录 3.2、softmax 回归3.2.1、softmax运算3.2.2、交叉熵损失函数3.2.3、PyTorch 从零实现 softmax 回归3.2.4、简单实现 softmax 回归 3.2、softmax 回归 3.2.1、softmax运算 softmax 函数是一种常用的激活函数,用于将实数向量转换为概率分布向量。它在多类别…...
【Nodejs】Node.js开发环境安装
1.版本介绍 在命令窗口中输入 node -v 可以查看版本 0.x 完全不技术 ES64.x 部分支持 ES6 特性5.x 部分支持ES6特性(比4.x多些),属于过渡产品,现在来说应该没有什么理由去用这个了6.x 支持98%的 ES6 特性8.x 支持 ES6 特性 2.No…...
简介及Python实现)
梅尔频谱(Mel spectrum)简介及Python实现
梅尔频谱(Mel spectrum)简介及Python实现 1. 梅尔频谱(Mel spectrum)简介2. Python可视化测试3.频谱可视化3.1 Mel 频谱可视化3.2 STFT spectrum参考文献资料1. 梅尔频谱(Mel spectrum)简介 在信号处理上,声信号(噪声信号)是一种重要的传感监测手段。对于语音分类任务…...
对合成质量影响)
s2-pro音色复用效果实测:不同参考音频时长(3s/10s/30s)对合成质量影响
s2-pro音色复用效果实测:不同参考音频时长(3s/10s/30s)对合成质量影响 1. 引言 s2-pro作为Fish Audio开源的专业级语音合成模型镜像,其音色复用功能在实际应用中表现如何?本文将针对一个关键问题展开实测:…...

Lumerical圆锥建模避坑指南:从参数计算到3D旋转生成的完整流程
Lumerical圆锥建模避坑指南:从参数计算到3D旋转生成的完整流程 在光学仿真领域,精确的几何建模往往是获得可靠结果的第一步。对于圆锥结构这种在光子晶体、超表面和纳米天线设计中广泛应用的形状,其建模过程看似简单却暗藏玄机。许多研究人员…...

数据恢复全面指南:开源数据救援工具组合实战手册
数据恢复全面指南:开源数据救援工具组合实战手册 【免费下载链接】testdisk TestDisk & PhotoRec 项目地址: https://gitcode.com/gh_mirrors/te/testdisk 数据丢失的噩梦与解决方案 2023年,摄影师小李在一次外景拍摄后误格式化了SD卡&#…...

UModel:虚幻引擎资源解析工具零基础入门到高级应用指南
UModel:虚幻引擎资源解析工具零基础入门到高级应用指南 【免费下载链接】UEViewer Viewer and exporter for Unreal Engine 1-4 assets (UE Viewer). 项目地址: https://gitcode.com/gh_mirrors/ue/UEViewer 虚幻引擎资源解析是游戏开发与逆向工程领域的关键…...

2026权威评测:毕业论文AIGC降重盘点!免费试用首选
【CSDN极客特稿AI科研生产力专栏】 各位深夜还在实验室和IDE里跑模型、改Paper的硕博兄弟们,见字如面。 把日历翻到2026年,当大语言模型(LLM)的参数量卷上天际的同时,各大高校的“反作弊探测矩阵”也完成了史诗级的底层…...

从“未知发布者”到“可信来源”:代码签名证书如何重塑用户信任?
一、用户信任危机:数字时代的核心挑战 在软件分发领域,"未知发布者"警告已成为开发者与用户之间的信任鸿沟。据2025年全球软件安全报告显示,73%的用户在看到此类警告时会直接放弃安装,即使软件来自知名企业。这种信任缺…...

终极PrimeVue Toast组件交互事件回调指南:从基础到高级应用
终极PrimeVue Toast组件交互事件回调指南:从基础到高级应用 【免费下载链接】primevue Next Generation Vue UI Component Library 项目地址: https://gitcode.com/GitHub_Trending/pr/primevue PrimeVue是一款功能强大的Vue UI组件库,其中Toast组…...
与多声道环绕声:从5.1到7.1的沉浸式体验升级)
Spatial Audio(空间音频)与多声道环绕声:从5.1到7.1的沉浸式体验升级
1. 从立体声到环绕声:音频技术的进化之路 记得我第一次在朋友家体验5.1声道家庭影院时,那种子弹从耳边呼啸而过的感觉让我彻底震撼了。这完全颠覆了我对"好音质"的认知——原来声音可以如此立体、如此真实。要理解现代的空间音频技术…...

uStepper S开源库深度解析:闭环步进控制与TMC2130驱动实战
1. uStepper S 开源驱动库深度解析:面向嵌入式工程师的实战指南 uStepper S 是一款集成了高性能步进电机驱动、高精度磁编码器反馈、ARM Cortex-M0 微控制器(NXP LPC11U35)与丰富外设接口的智能运动控制模块。其配套的 uStepper S Arduino…...

节能模式实战:OpenClaw+GLM-4.7-Flash定时任务调度
节能模式实战:OpenClawGLM-4.7-Flash定时任务调度 1. 为什么需要节能模式 上个月我的电费账单突然暴涨了40%,排查后发现是那台24小时运行的开发机惹的祸。这台机器不仅要跑OpenClaw智能体,还要负载GLM-4.7-Flash模型推理,风扇整…...