【雕爷学编程】MicroPython动手做(20)——掌控板之三轴加速度6
知识点:什么是掌控板?
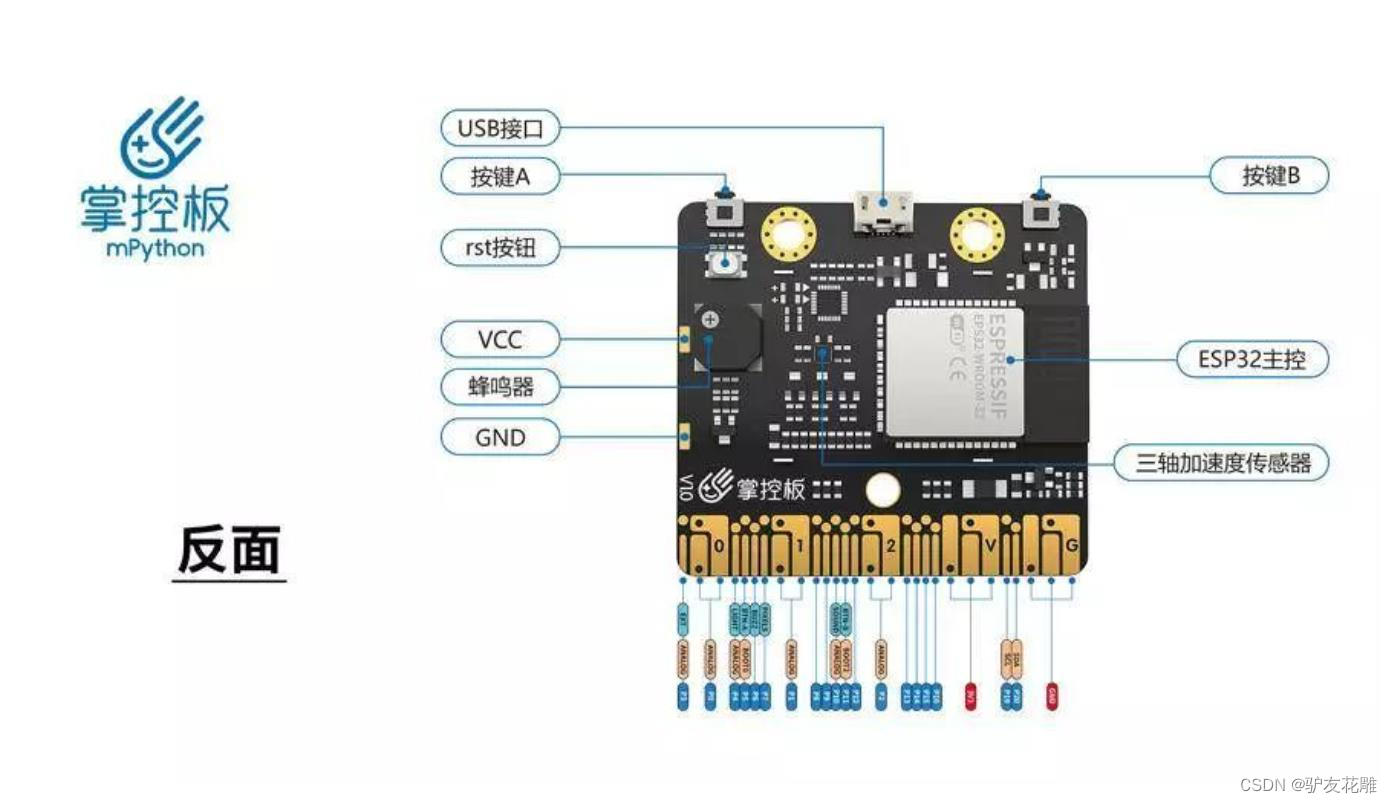
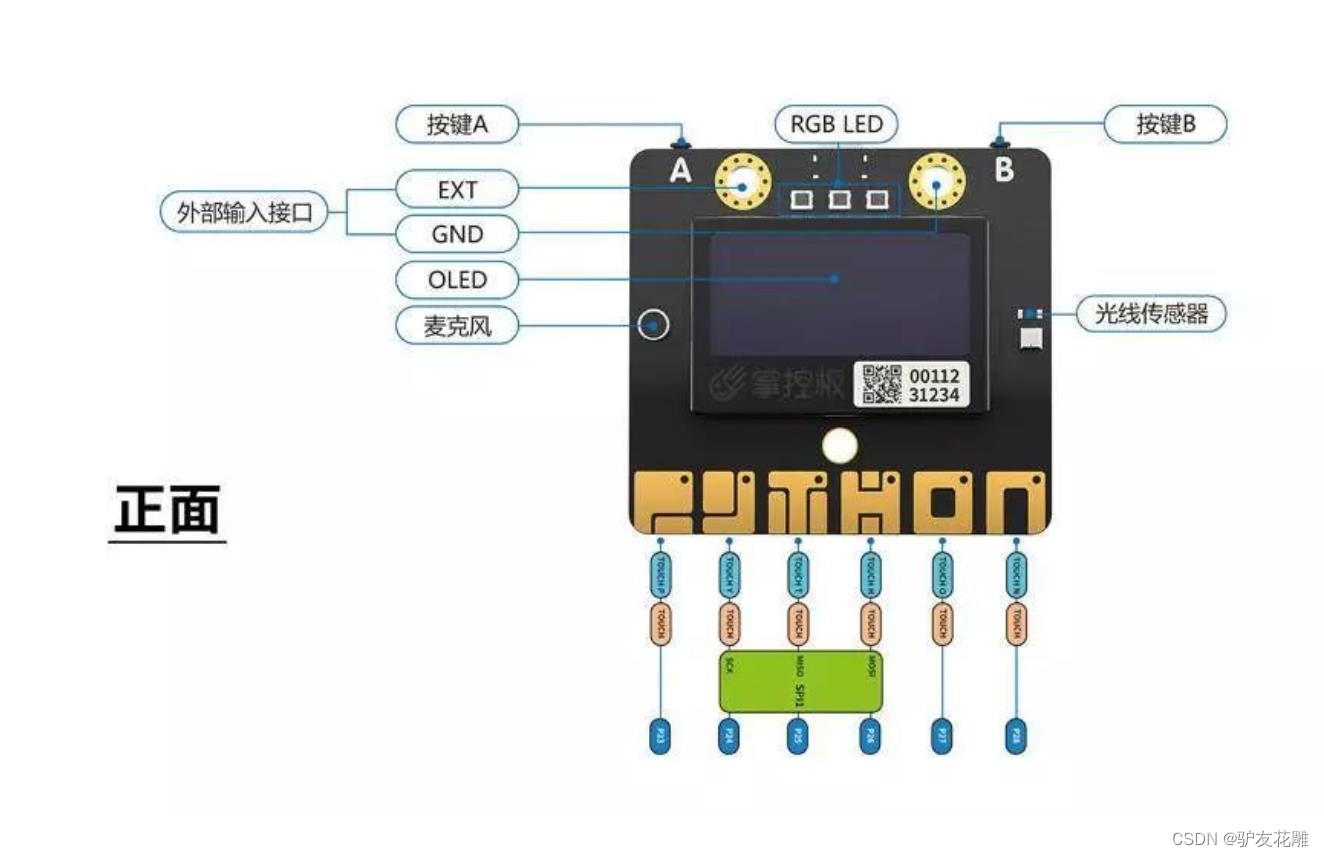
掌控板是一块普及STEAM创客教育、人工智能教育、机器人编程教育的开源智能硬件。它集成ESP-32高性能双核芯片,支持WiFi和蓝牙双模通信,可作为物联网节点,实现物联网应用。同时掌控板上集成了OLED显示屏、RGB灯、加速度计、麦克风、光线传感器、蜂鸣器、按键开关、触摸开关、金手指外部拓展接口,支持图形化及MicroPython代码编程,可实现智能机器人、创客智造作品等智能控制类应用。

掌控板硬件特性:
ESP-32主控
处理器:Tensilica LX6双核处理器(一核处理高速连接;一核独立应用开发)
主频:高达240MHz的时钟频率
SRAM:520KB
Flash:8MB
Wi-Fi标准:FCC/CE/TELEC/KCC
Wi-Fi协议:802.11 b/g/n/d/e/i/k/r (802.11n,速度高达150 Mbps),A-MPDU和A-MSDU聚合,支持0.4us防护间隔
频率范围:2.4~2.5 GHz
蓝牙协议:符合蓝牙v4.2 BR/EDR和BLE标准
蓝牙音频:CVSD和SBC音频低功耗:10uA
供电方式:Micro USB供电
工作电压:3.3V
最大工作电流:200mA
最大负载电流:1000mA
掌控板载
三轴加速度计MSA300,测量范围:±2/4/8/16G
地磁传感器MMC5983MA,测量范围:±8 Gauss;精度0.4mGz,电子罗盘误差±0.5°
光线传感器
麦克风
3 颗全彩ws2812灯珠
1.3英寸OLED显示屏,支持16*16字符显示,分辨率128x64
无源蜂鸣器
支持2个物理按键(A/B)、6个触摸按键
支持1路鳄鱼夹接口,可方便接入各种阻性传感器
拓展接口
20通道数字I/O, (其中支持12路PWM,6路触摸输入)
5通道12bit模拟输入ADC,P0~P4
1路的外部输入鳄鱼夹接口:EXT/GND
支持I2C、UART、SPI通讯协议


15、倾斜和摇晃的一双眼睛
#MicroPython动手做(20)——掌控板之三轴加速度
#倾斜和摇晃的一双眼睛(应用字典函数)
#MicroPython动手做(20)——掌控板之三轴加速度
#倾斜和摇晃的一双眼睛(应用字典函数)from mpython import *
from machine import Timer
import time_is_shaked = _is_thrown = False
_last_x = _last_y = _last_z = _count_shaked = _count_thrown = 0
def on_shaked():pass
def on_thrown():passtim11 = Timer(11)def timer11_tick(_):global _is_shaked, _is_thrown, _last_x, _last_y, _last_z, _count_shaked, _count_thrownif _is_shaked:_count_shaked += 1if _count_shaked == 5: _count_shaked = 0if _is_thrown:_count_thrown += 1if _count_thrown == 10: _count_thrown = 0if _count_thrown > 0: returnx=accelerometer.get_x(); y=accelerometer.get_y(); z=accelerometer.get_z()_is_thrown = (x * x + y * y + z * z < 0.25)if _is_thrown: on_thrown();returnif _last_x == 0 and _last_y == 0 and _last_z == 0:_last_x = x; _last_y = y; _last_z = z; returndiff_x = x - _last_x; diff_y = y - _last_y; diff_z = z - _last_z_last_x = x; _last_y = y; _last_z = zif _count_shaked > 0: return_is_shaked = (diff_x * diff_x + diff_y * diff_y + diff_z * diff_z > 1)if _is_shaked: on_shaked()tim11.init(period=100, mode=Timer.PERIODIC, callback=timer11_tick)_dir = ''
def on_tilt_forward():pass
def on_tilt_back():pass
def on_tilt_right():pass
def on_tilt_left():pass
def on_tilt_none():passtim14 = Timer(14)def timer14_tick(_):global _dirif accelerometer.get_x() < -0.3:if 'F' != _dir:_dir = 'F';on_tilt_forward()elif accelerometer.get_x() > 0.3:if 'B' != _dir:_dir = 'B';on_tilt_back()elif accelerometer.get_y() < -0.3:if 'R' != _dir:_dir = 'R';on_tilt_right()elif accelerometer.get_y() > 0.3:if 'L' != _dir:_dir = 'L';on_tilt_left()else:if '' != _dir:_dir = '';on_tilt_none()tim14.init(period=200, mode=Timer.PERIODIC, callback=timer14_tick)def on_tilt_forward():global face, dt_facesface = dt_faces.get("Up")def on_tilt_back():global face, dt_facesface = dt_faces.get("Down")def on_tilt_left():global face, dt_facesface = dt_faces.get("Left")def on_tilt_right():global face, dt_facesface = dt_faces.get("Right")def on_tilt_none():global face, dt_facesface = dt_faces.get("Neutral")image_picture = Image()dt_faces = {"Neutral":image_picture.load('face/Eyes/Neutral.pbm', 0), "Up":image_picture.load('face/Eyes/Up.pbm', 0), "Down":image_picture.load('face/Eyes/Down.pbm', 0), "Left":image_picture.load('face/Eyes/Middle left.pbm', 0), "Right":image_picture.load('face/Eyes/Middle right.pbm', 0), "Dizzy":image_picture.load('face/Eyes/Dizzy.pbm', 0)}
face = dt_faces.get("Neutral")
while True:oled.fill(0)if _is_shaked:oled.blit(dt_faces.get("Dizzy"), 20, 0)oled.show()time.sleep_ms(2000)else:oled.blit(face, 20, 0)oled.show()
字典
字典是一种可变容器模型,且可存储任意类型对象,格式如 d = {key1 : value1, key2 : value2},键必须是唯一的,但值则不必。
mPython X 图形编程



16、水平仪和测量角度
#MicroPython动手做(20)——掌控板之三轴加速度
#水平仪和测量角度
#MicroPython动手做(20)——掌控板之三轴加速度
#水平仪和测量角度from mpython import *
import math
import framebuf
import font.dvsm_12
import timedef get_tilt_angle(_axis):_Ax = accelerometer.get_x()_Ay = accelerometer.get_y()_Az = accelerometer.get_z()if 'X' == _axis:_T = math.sqrt(_Ay ** 2 + _Az ** 2)if _Az < 0: return math.degrees(math.atan2(_Ax , _T))else: return 180 - math.degrees(math.atan2(_Ax , _T))elif 'Y' == _axis:_T = math.sqrt(_Ax ** 2 + _Az ** 2)if _Az < 0: return math.degrees(math.atan2(_Ay , _T))else: return 180 - math.degrees(math.atan2(_Ay , _T))elif 'Z' == _axis:_T = math.sqrt(_Ax ** 2 + _Ay ** 2)if (_Ax + _Ay) < 0: return 180 - math.degrees(math.atan2(_T , _Az))else: return math.degrees(math.atan2(_T , _Az)) - 180return 0def display_font(_font, _str, _x, _y, _wrap, _z=0):_start = _xfor _c in _str:_d = _font.get_ch(_c)if _wrap and _x > 128 - _d[2]: _x = _start; _y += _d[1]if _c == '1' and _z > 0: oled.fill_rect(_x, _y, _d[2], _d[1], 0)oled.blit(framebuf.FrameBuffer(bytearray(_d[0]), _d[2], _d[1],framebuf.MONO_HLSB), (_x+int(_d[2]/_z)) if _c=='1' and _z>0 else _x, _y)_x += _d[2]while True:Tx = get_tilt_angle('X')oled.fill(0)display_font(font.dvsm_12, (str(" Angle :") + str(Tx)), 0, 0, False)oled.circle(64, 60, 46, 1)oled.fill_circle(64, 60, 5, 1)Dx = int((64 + math.cos(math.radians(Tx)) * 46))Dy = int((60 - math.fabs(math.sin(math.radians(Tx)) * 46)))oled.hline(0, 60, 128, 1)oled.line(64, 60, Dx, Dy, 1)oled.fill_rect(0, 61, 128, 3, 0)oled.vline(64, 61, 2, 1)Lx = int(numberMap(accelerometer.get_y(),(-1),1,128,0))oled.vline(Lx, 61, 3, 1)if Lx == 64:rgb.fill((int(0), int(51), int(0)))rgb.write()time.sleep_ms(1)oled.fill_circle(13, 20, 3, 1)oled.hline(7, 20, 13, 1)else:oled.fill_rect(7, 16, 13, 6, 0)rgb.fill( (0, 0, 0) )rgb.write()time.sleep_ms(1)oled.show()
mPython X 图形编程


17、掌控闪灯大量程计步器(十万步)
#MicroPython动手做(20)——掌控板之三轴加速度
#掌控闪灯大量程计步器(十万步)
#MicroPython动手做(20)——掌控板之三轴加速度
#掌控闪灯大量程计步器(十万步)from mpython import *from machine import Timer_is_shaked = _is_thrown = False
_last_x = _last_y = _last_z = _count_shaked = _count_thrown = 0
def on_shaked():pass
def on_thrown():passtim11 = Timer(11)def timer11_tick(_):global _is_shaked, _is_thrown, _last_x, _last_y, _last_z, _count_shaked, _count_thrownif _is_shaked:_count_shaked += 1if _count_shaked == 5: _count_shaked = 0if _is_thrown:_count_thrown += 1if _count_thrown == 10: _count_thrown = 0if _count_thrown > 0: returnx=accelerometer.get_x(); y=accelerometer.get_y(); z=accelerometer.get_z()_is_thrown = (x * x + y * y + z * z < 0.25)if _is_thrown: on_thrown();returnif _last_x == 0 and _last_y == 0 and _last_z == 0:_last_x = x; _last_y = y; _last_z = z; returndiff_x = x - _last_x; diff_y = y - _last_y; diff_z = z - _last_z_last_x = x; _last_y = y; _last_z = zif _count_shaked > 0: return_is_shaked = (diff_x * diff_x + diff_y * diff_y + diff_z * diff_z > 1)if _is_shaked: on_shaked()tim11.init(period=100, mode=Timer.PERIODIC, callback=timer11_tick)import timeimport framebufimport font.digiface_30def display_font(_font, _str, _x, _y, _wrap, _z=0):_start = _xfor _c in _str:_d = _font.get_ch(_c)if _wrap and _x > 128 - _d[2]: _x = _start; _y += _d[1]if _c == '1' and _z > 0: oled.fill_rect(_x, _y, _d[2], _d[1], 0)oled.blit(framebuf.FrameBuffer(bytearray(_d[0]), _d[2], _d[1],framebuf.MONO_HLSB), (_x+int(_d[2]/_z)) if _c=='1' and _z>0 else _x, _y)_x += _d[2]
bbb = 0
while True:oled.fill(0)oled.DispChar('掌控计步器', 35, 2, 1)oled.DispChar('步', 115, 40, 1)if _is_shaked:rgb.fill((int(0), int(102), int(0)))rgb.write()time.sleep_ms(1)time.sleep_ms(60)rgb.fill((int(0), int(0), int(0)))rgb.write()time.sleep_ms(1)bbb = bbb + 1else:rgb.fill((int(153), int(0), int(0)))rgb.write()time.sleep_ms(1)if bbb >= 0 and bbb <= 9:display_font(font.digiface_30, (str(bbb)), 55, 24, False, 2)elif bbb >= 9 and bbb <= 99:display_font(font.digiface_30, (str(bbb)), 45, 24, False, 2)elif bbb >= 99 and bbb <= 999:display_font(font.digiface_30, (str(bbb)), 35, 24, False, 2)elif bbb >= 999 and bbb <= 9999:display_font(font.digiface_30, (str(bbb)), 20, 24, False, 2)elif bbb >= 9999 and bbb <= 99999:display_font(font.digiface_30, (str(bbb)), 10, 24, False, 2)oled.show()
注解
使用摇晃模块,优点是算法简单,不足之处是触发计步的阙值是固定的,不能调整
mPython 图形编程


相关文章:
【雕爷学编程】MicroPython动手做(20)——掌控板之三轴加速度6
知识点:什么是掌控板? 掌控板是一块普及STEAM创客教育、人工智能教育、机器人编程教育的开源智能硬件。它集成ESP-32高性能双核芯片,支持WiFi和蓝牙双模通信,可作为物联网节点,实现物联网应用。同时掌控板上集成了OLED…...
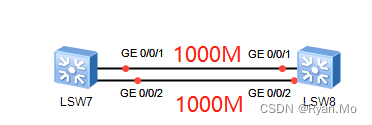
链路 聚合
静态链路聚合:多数内网使用 。非物理直连建议与BFD联动 动态链路聚合LACP:是公有协议、内网、二层专线接口都能使用,现网多数使用此方式链路 聚合 PAGP:思科私有协议,只支持思科设备使,现网多数不用...
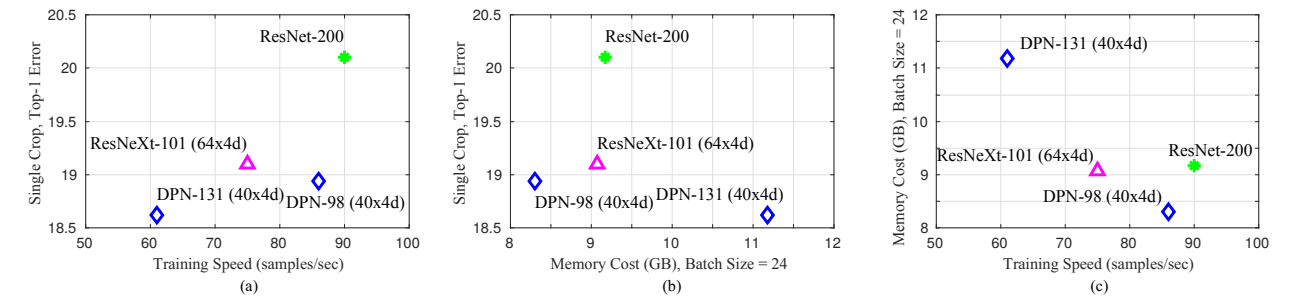
DPN(Dual Path Network)网络结构详解
论文:Dual Path Networks 论文链接:https://arxiv.org/abs/1707.01629 代码:https://github.com/cypw/DPNs MXNet框架下可训练模型的DPN代码:https://github.com/miraclewkf/DPN 我们知道ResNet,ResNeXt,D…...

【转载】Gin框架优雅退出
转载自: https://juejin.cn/post/7212786062224146487 Gin是一个非常流行的Web框架,经常被用于构建高性能、易于维护的Web应用。在领域驱动设计(DDD)和微服务等方面也有广泛应用。但是,像其他应用程序一样,…...
【数字IC设计】VCS仿真DesignWare IP
DesignWare介绍 DesignWare是SoC/ASIC设计者最钟爱的设计IP库和验证IP库。它包括一个独立于工艺的、经验证的、可综合的虚拟微架构的元件集合,包括逻辑、算术、存储和专用元件系列,超过140个模块。DesignWare和 Design Compiler的结合可以极大地改进综合…...
【*1900 图论+枚举思想】CF1328 E
Problem - E - Codeforces 题意: 思路: 注意到题目的性质:满足条件的路径个数是极少的,因为每个点离路径的距离<1 先考虑一条链,那么直接就选最深那个点作为端点即可 为什么,因为我们需要遍历所有点…...
10.5-通信管理模块)
AutoSAR系列讲解(实践篇)10.5-通信管理模块
目录 一、ComM 1、内部唤醒 2、外部唤醒 二、CanSM 三、状态关联 之前讲解了BswM和EcuM,详细讲解了BswM的配置,而大部分的配置都在BswM中做了,EcuM的配置就很简单了,基本上勾一勾就ok了。下面我们 来讲解模式管理还可能用到的通信模块 一、ComM ComM就像一个通信的总…...
)
2023.7.30(epoll实现并发服务器)
服务器 #include <arpa/inet.h> #include <netinet/in.h> #include <netinet/ip.h> #include <stdio.h> #include <stdlib.h> #include <string.h> #include <sys/epoll.h> #include <sys/socket.h> #include <sys/types.…...
)
小研究 - 基于解析树的 Java Web 灰盒模糊测试(一)
由于 Java Web 应用业务场景复杂, 且对输入数据的结构有效性要求较高, 现有的测试方法和工具在测试Java Web 时存在测试用例的有效率较低的问题. 为了解决上述问题, 本文提出了基于解析树的 Java Web 应用灰盒模糊测试方法. 首先为 Java Web 应用程序的输入数据包进行语法建模创…...
SpringBoot接手JSP项目--【JSB项目实战】
SpringBoot系列文章目录 SpringBoot知识范围-学习步骤【JSB系列之000】 文章目录 SpringBoot系列文章目录[TOC](文章目录) SpringBoot技术很多很多工作之初,面临JSP的老项目我要怎么办环境及工具:项目里可能要用到的技术JSPjstl其它的必要知识 上代码WE…...
Python模块psycopg2连接postgresql
目录 1. 基础语法 2. 基础用法 3. 多条SQL 4. 事务SQL 1. 基础语法 语法 psycopg2.connect(dsn #指定连接参数。可以使用参数形式或 DSN 形式指定。host #指定连接数据库的主机名。dbname #指定数据库名。user #指定连接数据库使用的用户名。…...

Kotlin基础(八):泛型
前言 本文主要讲解kotlin泛型,主要包括泛型基础,类型变异,类型投射,星号投射,泛型函数,泛型约束,泛型在Android中的使用。 Kotlin文章列表 Kotlin文章列表: 点击此处跳转查看 目录 1.1 泛型基…...
环境变量path配置及其作用)
Java学习笔记——(10)环境变量path配置及其作用
环境变量的作用为了在 Dos 的任务目录,可以去使用 javac 和 java开发工具命令 先配置 JAVA_HOME 指向 jdk 安装的主目录(避免开发中出现问题) 编辑 path 环境变量(开发环境),增加 %JAVA_HOME%\bin 编辑 path 环境变量(运行环境…...
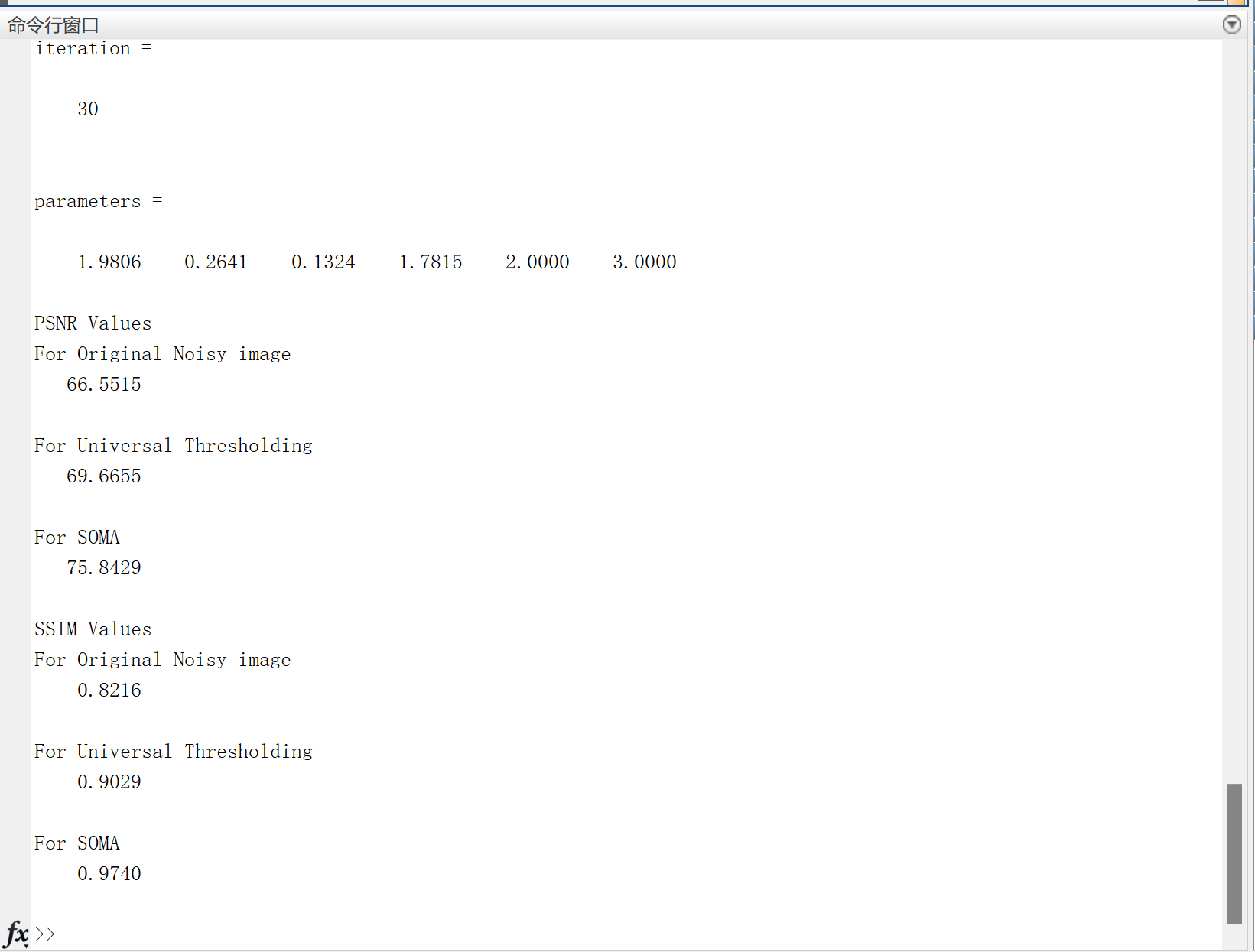
【图像去噪】基于进化算法——自组织迁移算法(SOMA)的图像去噪研究(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭&a…...
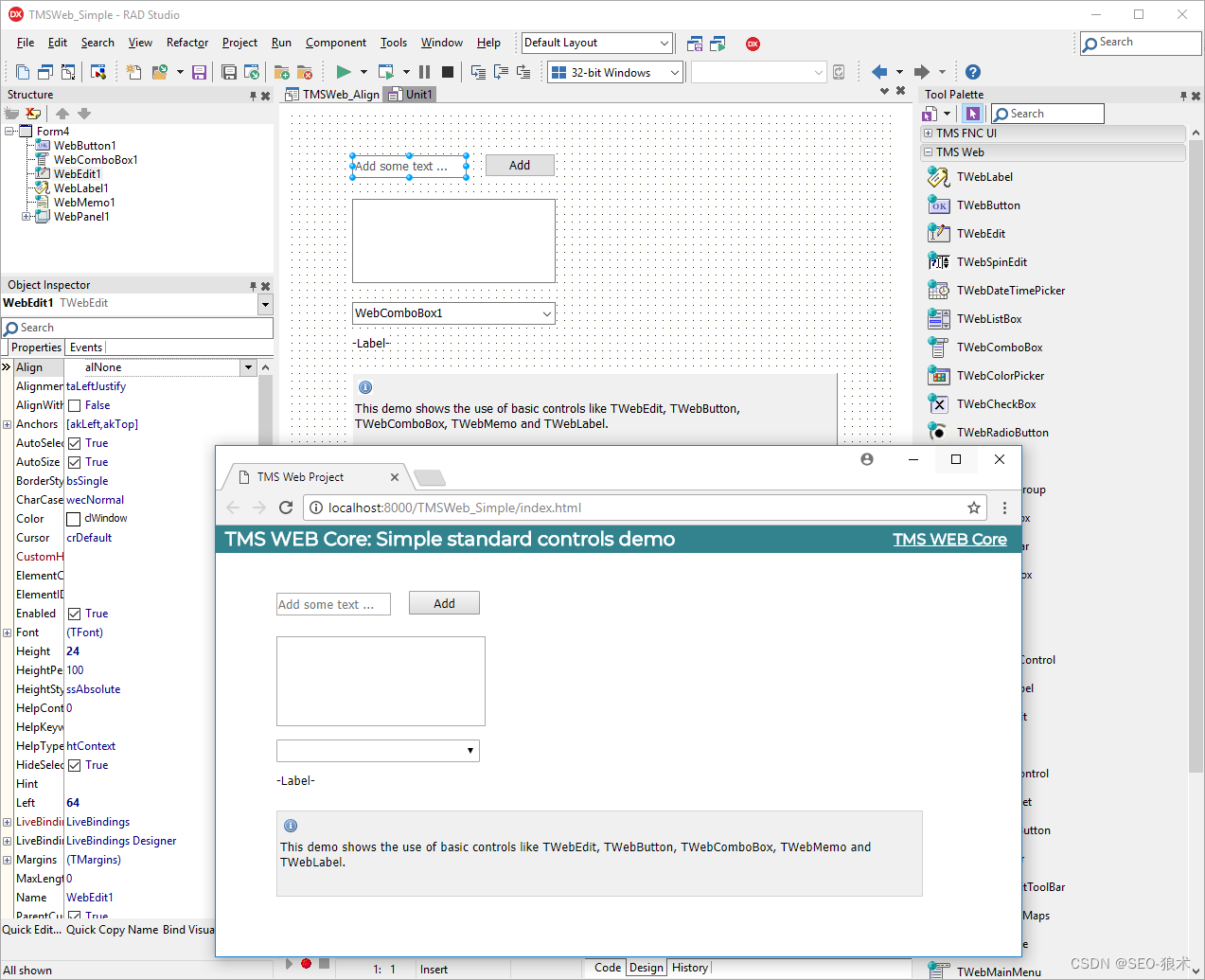
TMS WEB Core Crack,TMS软件Delphi组件RADical Web
TMS WEB Core Crack,TMS软件Delphi组件RADical Web 使用我们的现代web应用程序框架,可以节省宝贵的时间并创造丰富的用户体验。我们所有的工具都由经验丰富的开发人员组成的专门团队提供支持。您可以信赖卓越的服务、活跃的社区和我们不断的创新。TMS Software是您的…...

PHP使用Redis实战实录4:单例模式和面向过程操作redis的语法
PHP使用Redis实战实录系列 PHP使用Redis实战实录1:宝塔环境搭建、6379端口配置、Redis服务启动失败解决方案PHP使用Redis实战实录2:Redis扩展方法和PHP连接Redis的多种方案PHP使用Redis实战实录3:数据类型比较、大小限制和性能扩展PHP使用Re…...

解决:移动端H5的<video>初始化拿不到总时长
移动端 在<video>的初始化后,会调用如下事件。 canplay"canplay" 解决方案:<video>添加自动播放属性: autoplay"autoplay" 然后这个方法里,用js在0.01秒后主动关闭播放,接着在0.…...

百度云上传身份证获取身份信息封装
1.目录结构 -script_discerm ------------包 -discerm.py --------------主要逻辑 -__init__.py -id_care---------------文件夹 存放图片 2.安装模块 pip install urllib31.23 pip install requests pip install base64 3.各文件内容 2.1 discerm.py import jsonimpo…...

vscode 上cmake 版本过低
问题: 装了vscode中的camke插件后,报错如下: CMake 3.9 or higher is required. You are running version 3.3.2。 解决办法: 卸载掉插件的cmake。 到官网下载合适的版本,设置系统变量 然后重新下载camke tools&…...
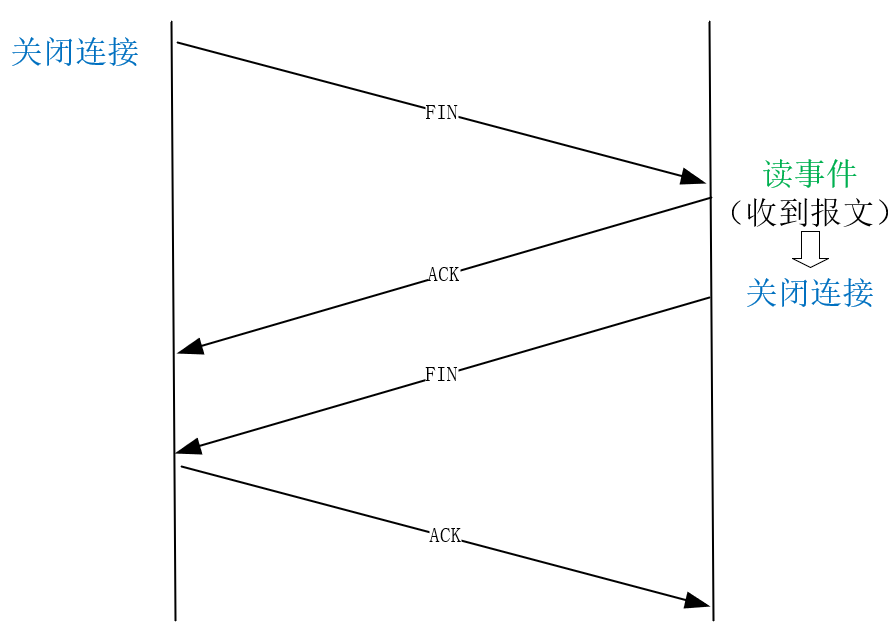
OS-08-事件驱动:C10M是如何实现的?
08-事件驱动:C10M是如何实现的? 你好,我是陶辉。 上一讲介绍了广播与组播这种一对多通讯方式,从这一讲开始,我们回到主流的一对一通讯方式。 早些年我们谈到高并发,总是会提到C10K,这是指服务…...

鸣潮自动化终极指南:5步实现后台智能挂机,解放你的游戏时间
鸣潮自动化终极指南:5步实现后台智能挂机,解放你的游戏时间 【免费下载链接】ok-wuthering-waves 鸣潮 后台自动战斗 自动刷声骸 一键日常 Automation for Wuthering Waves 项目地址: https://gitcode.com/GitHub_Trending/ok/ok-wuthering-waves …...

作业5:案例挑战
文章目录1、密码锁设计 P110,2、基于PWM的可调光台灯设计 P131,3、动态密码获取系统设计 P210,效果(1) 密码模式说明(2) 测试密码输入(3) 测试修改密码(4) 测试修改密码模式4、数码管时钟系统设计 P228,7.5.2 数码管时钟系统设计&…...
)
一种三菱MXF100-8 走CC LINK IE TSN 网络控制单轴伺服的功能块(可控30+轴)
三菱电机去年新推出了MX系列的PLC,其中最吸引人的应该就是本体网口支持CC Link TSN总线了。但MXF100系列的轴控功能,只有8轴和16轴两个版本,为了充分应用TSN的强大性能,作者手搓了一个直接读写对象字典实现单轴伺服定位控制的功能…...

龙芯LS2K PMON启动全解析:从内核到U盘识别的奥秘
【龙芯LS2K PMON终极干货】整机设备启动全景图:从 mainbus 开机到 U 盘识别全流程 一、整篇总纲(最强一句话) 内核启动 → 读 ioconf.c/cfdata 硬件族谱 → 从根总线 mainbus 开始遍历 → 逐级 attach 设备 → 启动 PCI → 扫描到 OTG 控制器 → 加载 dwc2 驱动 → 开启 U…...

事件相机数据处理与GRU网络硬件加速技术解析
1. 事件相机与GRU网络硬件加速概述事件相机(Event Camera)是一种革命性的视觉传感器,其工作原理与传统帧式相机截然不同。它通过独立工作的像素阵列异步检测亮度变化,当某个像素的亮度变化超过预设阈值时,会立即生成一…...

激光器物理理论模型:从经典到量子,工程师如何选择?
1. 激光器物理理论模型全景概览激光,这束高度相干、单色、定向的光,其诞生与运作背后,是一套极其精密的物理法则。对于从事光电子、激光技术研发,乃至物理研究的工程师和学者而言,理解这些法则的不同描述层次ÿ…...

NebulaGraph Console终极指南:简单快速掌握图数据库命令行工具
NebulaGraph Console终极指南:简单快速掌握图数据库命令行工具 【免费下载链接】nebula-console Command line interface for the Nebula Graph service 项目地址: https://gitcode.com/gh_mirrors/ne/nebula-console NebulaGraph Console是NebulaGraph图数据…...

纤维增强复合材料多轴3D打印的神经网络协同优化
1. 纤维增强复合材料与多轴3D打印技术概述纤维增强复合材料(Fiber-Reinforced Composites)因其独特的力学性能组合——高强度、高刚度和低密度,已成为现代工程设计中不可或缺的材料选择。这类材料由高强度纤维(如碳纤维、玻璃纤维…...

WT32-S3-DK开发板全解析:从硬件设计到物联网项目实战
1. 项目概述:一块“小而全”的物联网开发板最近在捣鼓一个智能家居的传感器节点项目,需要一块性能足够、接口丰富、最好还带屏幕的开发板。市面上ESP32-S3的方案很多,但要么是核心板,需要自己配底板和屏幕,要么就是功能…...

5月22日截止报名!重庆农商行2026求职报名+备考解读
本文涵盖:重庆农村商业银行2026招聘报名时间、重庆农商行笔试内容、重庆农商行面试真题、在线刷题等备考信息小职划重点!重庆农村商业银行2026招聘,报名截止时间为2026年5月22日17:00① 招聘流程:报名→在线测评→资格审查→测试→…...