【解惑笔记】树莓派+OpenCV+YOLOv5目标检测(Pytorch框架)
【学习资料】
子豪兄的零基础树莓派教程![]() https://github.com/TommyZihao/ZihaoTutorialOfRaspberryPi/blob/master/%E7%AC%AC2%E8%AE%B2%EF%BC%9A%E6%A0%91%E8%8E%93%E6%B4%BE%E6%96%B0%E6%89%8B%E6%97%A0%E7%97%9B%E5%BC%80%E6%9C%BA%E6%8C%87%E5%8D%97.md#%E7%83%A7%E5%BD%95%E9%95%9C%E5%83%8F第2讲:树莓派新手无痛开机指南【子豪兄的树莓派零基础教程】
https://github.com/TommyZihao/ZihaoTutorialOfRaspberryPi/blob/master/%E7%AC%AC2%E8%AE%B2%EF%BC%9A%E6%A0%91%E8%8E%93%E6%B4%BE%E6%96%B0%E6%89%8B%E6%97%A0%E7%97%9B%E5%BC%80%E6%9C%BA%E6%8C%87%E5%8D%97.md#%E7%83%A7%E5%BD%95%E9%95%9C%E5%83%8F第2讲:树莓派新手无痛开机指南【子豪兄的树莓派零基础教程】![]() https://www.bilibili.com/video/BV1ab411x7aC/?spm_id_from=333.999.0.0 树莓派4b开发之开发环境搭建 - 飞起的小田 - 博客园
https://www.bilibili.com/video/BV1ab411x7aC/?spm_id_from=333.999.0.0 树莓派4b开发之开发环境搭建 - 飞起的小田 - 博客园![]() https://www.cnblogs.com/tianxxl/p/13587054.html
https://www.cnblogs.com/tianxxl/p/13587054.html
基于树莓派4B的OpenCV安装与简单应用(真速通版)![]() https://blog.csdn.net/black_sneak/article/details/131343797 《树莓派快速上手》 说明 (itprojects.cn)
https://blog.csdn.net/black_sneak/article/details/131343797 《树莓派快速上手》 说明 (itprojects.cn)![]() https://doc.itprojects.cn/0007.zhishi.raspberrypi/02.doc/index.html#/READMEYOLOv8应用及解析
https://doc.itprojects.cn/0007.zhishi.raspberrypi/02.doc/index.html#/READMEYOLOv8应用及解析![]() https://www.youtube.com/watch?v=ydC9x1L5SJU目标检测---教你利用yolov5训练自己的目标检测模型
https://www.youtube.com/watch?v=ydC9x1L5SJU目标检测---教你利用yolov5训练自己的目标检测模型![]() https://blog.csdn.net/didiaopao/article/details/119954291yolov5 训练结果解析
https://blog.csdn.net/didiaopao/article/details/119954291yolov5 训练结果解析![]() https://blog.csdn.net/sinat_37322535/article/details/117260081?ops_request_misc=%257B%2522request%255Fid%2522%253A%2522169080317916800186567366%2522%252C%2522scm%2522%253A%252220140713.130102334..%2522%257D&request_id=169080317916800186567366&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2~blog~sobaiduend~default-2-117260081-null-null.268^v1^koosearch&utm_term=yolov5%E7%BB%93%E6%9E%9C%E5%88%86%E6%9E%90&spm=1018.2226.3001.4450
https://blog.csdn.net/sinat_37322535/article/details/117260081?ops_request_misc=%257B%2522request%255Fid%2522%253A%2522169080317916800186567366%2522%252C%2522scm%2522%253A%252220140713.130102334..%2522%257D&request_id=169080317916800186567366&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2~blog~sobaiduend~default-2-117260081-null-null.268^v1^koosearch&utm_term=yolov5%E7%BB%93%E6%9E%9C%E5%88%86%E6%9E%90&spm=1018.2226.3001.4450
-【超详细 Python+PyCharm的安装步骤及PyCharm的使用】
(超详细)Python+PyCharm的安装步骤及PyCharm的使用(含快捷键)_pycharm python_IT路上的军哥的博客-CSDN博客![]() https://blog.csdn.net/JunLeon/article/details/120698578?ops_request_misc=%7B%22request_id%22%3A%22168955879816800222871340%22%2C%22scm%22%3A%2220140713.130102334..%22%7D&request_id=168955879816800222871340&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2~blog~sobaiduend~default-1-120698578-null-null.268%5Ev1%5Ekoosearch&utm_term=python%E4%B8%8Epycharm&spm=1018.2226.3001.4450
https://blog.csdn.net/JunLeon/article/details/120698578?ops_request_misc=%7B%22request_id%22%3A%22168955879816800222871340%22%2C%22scm%22%3A%2220140713.130102334..%22%7D&request_id=168955879816800222871340&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2~blog~sobaiduend~default-1-120698578-null-null.268%5Ev1%5Ekoosearch&utm_term=python%E4%B8%8Epycharm&spm=1018.2226.3001.4450
- 【python安装包不要放在python在install选择路径的文件夹里】
否则pycharm在配置python环境时会一直显示重新安装python
-【cmd安装pip和setuptools但pycharm的setting中检测不到这两个工具包,重点在于修改pycharm中python的安装路径(Pycharm cannot set up a python SDK问题解决方法)】Pycharm cannot set up a python SDK问题解决方法_山河不见老的博客-CSDN博客![]() https://blog.csdn.net/weixin_42212872/article/details/122405569
https://blog.csdn.net/weixin_42212872/article/details/122405569
-【第三方工具包清华大学镜像网站cmd用安装指令(例)】
pip install TensorFlow -i https://pypi.tuna.tsinghua.edu.cn/simple
-【最好用16GB的SD卡下载系统镜像,泪的教训!!!为了配置用户名及密码,最新版本只能用树莓派官方的镜像下载器下载镜像】
-【插上SD卡后红灯常亮,绿灯闪烁;网线绿灯不亮,橘灯常亮;此时需要重启树莓派;即安装好系统后树莓派需要两次开机!!!】
-【同一局域网下查找树莓派ip,在cmd中(管理员身份运行)输入ping -4 raspberrypi.local】
-【VNC连接树莓派出现cannot currently show the desktop问题的解决方法】树莓派默认分辨率模式为Default 720×480,这可能造成VNC显示异常,在putty中用sudo raspi-config修改相关设置,以更换到其他更高的分辨率模式。
-【由于ip分配是随机的,每次更换wifi后vnc都需要重新查找树莓派ip】
-【sudo = superuser do】
-【使用putty重启树莓派时,如果卡了需要手动拔掉充电线;使用reboot重启不需要拔掉充电线】
-【使用camera后,需要在putty中用sodu nano /boot/config.txt删除文件中hdmi_force_hotplug前的#符号,然后ctrl+x再按y回车后退出,拔线重启树莓派;若仍旧不行,则查看分辨率是否又被更改】
-【更换国内镜像源】
注意下载的树莓派系统版本用户是什么,三种用户有三种不同的镜像源,本机用户为aarch64】树莓派换源_code artist的博客-CSDN博客![]() https://blog.csdn.net/qq_55542305/article/details/125921513?ops_request_misc=%7B%22request_id%22%3A%22168990724916800185836822%22%2C%22scm%22%3A%2220140713.130102334.pc_all.%22%7D&request_id=168990724916800185836822&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2~all~first_rank_ecpm_v1~rank_v31_ecpm-4-125921513-null-null.142%5Ev90%5Econtrol_2,239%5Ev3%5Econtrol&utm_term=%E6%A0%91%E8%8E%93%E6%B4%BE%E6%9B%B4%E6%8D%A2%E6%BA%90&spm=1018.2226.3001.4187
https://blog.csdn.net/qq_55542305/article/details/125921513?ops_request_misc=%7B%22request_id%22%3A%22168990724916800185836822%22%2C%22scm%22%3A%2220140713.130102334.pc_all.%22%7D&request_id=168990724916800185836822&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2~all~first_rank_ecpm_v1~rank_v31_ecpm-4-125921513-null-null.142%5Ev90%5Econtrol_2,239%5Ev3%5Econtrol&utm_term=%E6%A0%91%E8%8E%93%E6%B4%BE%E6%9B%B4%E6%8D%A2%E6%BA%90&spm=1018.2226.3001.4187
-【树莓派如果可以正常import cv2但是无法用print(cv2.__version__)语句查看opencv版本,可使用下面这个语句】
import pkg_resources
pkg_resources.get_distribution("opencv-python").version
-【树莓派使用opencv环境安装(实际上不知道到底有没有关系,主要还是跟着老师的教程做了一遍,估计是安装的软件包太多了,出了什么错,以至于把系统都搞崩了一次,重装系统后,按王铭东老师的步骤安装opencv(4.8.0)与numpy(1.25)等皆正常)】
sudo apt-get install libjpeg-dev libatlas-base-dev libjpeg-dev libtiff5-dev libpng12-dev libqtgui4 libqt4-test libjasper-dev (后来安装的部分软件包,不知道安装成功和这些有没有直接关系)
-【一些linux终端的命令】
- 以管理员身份运行终端
sudo -s
- 终端运行桌面上的python代码
cd Desktop/
Python camera.py
- 终端打开桌面上的xxx.txt文件
cd Desktop/xxx.txt/
- 查看文件目录
ll或者ls
- 打开桌面上Data文件夹中的command.txt文件
cd Desktop/Data/
cat command.txt
-【使用OpenCV在树莓派上实时显示摄像头画面的Python代码示例】
import cv2# 创建摄像头对象cap = cv2.VideoCapture(0)#调用摄像头‘0’一般是打开电脑自带摄像头,‘1’是打开外部摄像头# 检查摄像头是否成功打开if not cap.isOpened():print("无法打开摄像头")exit()# 循环读取摄像头画面while True:# 读取一帧图像ret, frame = cap.read()# 检查图像是否成功读取if not ret:print("无法获取图像帧")break# 在窗口中显示图像cv2.imshow("Camera", frame)# 按下 'q' 键退出循环if cv2.waitKey(1) & 0xFF == ord('q'):break# 释放摄像头资源cap.release()# 关闭窗口cv2.destroyAllWindows()这段代码首先创建一个摄像头对象 `cap`,然后通过 `cap.read()` 循环读取摄像头画面的每一帧图像。每次读取到图像后,使用 `cv2.imshow()` 在窗口中显示图像。通过按下 'q' 键可以退出循环,最后释放摄像头资源并关闭窗口。请确保已经安装了OpenCV库,并且摄像头设备正确连接并且具有适当的权限。可以将代码保存为 `camera.py`,然后在终端中运行 `python camera.py` 来执行代码。- 【模型训练,文件修改】
文件目录
- yolov5-master
- data
- GarbageClassify(新建文件夹,存放训练图片和配置路径文件等)
- images
- test(模型训练好后测试时图片)
- train(模型训练时所用的训练图片)
- val(模型训练时所用的验证图片)
- labels
- train(模型训练时所用的训练标签)
- val(模型训练时所用的验证标签)
- GarbageClassify(ymal文件,根据注释修改路径、检测类别等内容)
- .......(固定文件)
- model(固定文件夹)
- runs(新建文件夹,存放训练结果)
- detect(新建文件夹,存放训练结果)
- train(新建文件夹)
- segments(固定文件夹)
- utils(固定文件夹)
- ......一堆固定文件(注意有一个train.py文件,具体看下面)
- train.py
(按照路径提示①把yolov5s.pt预训练模型放在一级文件夹下②查看model文件夹中是否包含yolov5的各种ymal文件③【最重要】data中的yaml文件路径)

- 【labelimg标记】VOC更换成YOLO才能把标记结果的xml转换成txt文件
- 【command命令】树莓派终端cd Desktop/yolo文件夹名称/
训练的命令:(云服务器上)
python3 train.py --weights yolov5s.pt --data data/GarbageClassify/GarbageClassify.yaml --workers 4 --batch-size 2 --epochs 50
(workers同时训练目标;batch训练批次;epochs训练轮次)
识别的命令:(树莓派上)
python3 detect.py --weight best.pt --source data/GarbageClassify/images/test
相关文章:
【解惑笔记】树莓派+OpenCV+YOLOv5目标检测(Pytorch框架)
【学习资料】 子豪兄的零基础树莓派教程https://github.com/TommyZihao/ZihaoTutorialOfRaspberryPi/blob/master/%E7%AC%AC2%E8%AE%B2%EF%BC%9A%E6%A0%91%E8%8E%93%E6%B4%BE%E6%96%B0%E6%89%8B%E6%97%A0%E7%97%9B%E5%BC%80%E6%9C%BA%E6%8C%87%E5%8D%97.md#%E7%83%A7%E5%BD%95…...
PostgreSQL中如何配置Huge page的数量
在了解如在PG中如何配置大页之前,我们先要对大页进行一定的了解,为什么要配置大页,配置大页的好处有哪些。 我们日常的操作系统中,程序不直接使用内存,而是使用虚拟内存地址来处理内存分配,避免计算的复杂…...
Mysql之binlog日志浅析
一、binlog日志简介 Binlog是MySQL数据库中的二进制日志,用于记录数据库中所有修改操作,包括增删改等操作。binlog以二进制格式保存,可以通过解析binlog文件来查看数据库的操作历史记录。binlog日志可以用于数据恢复、数据备份、数据同步等场…...

js 生成器函数
生成器函数(Generator Function):生成器函数是一种特殊的函数,可以通过yield关键字来暂停和恢复函数的执行,从而实现惰性计算和迭代器的功能。在例子中,我们定义了一个fibonacci生成器函数,它使…...
HCIP OSPF+BGP综合实验
题目 1、该拓扑为公司网络,其中包括公司总部、公司分部以及公司骨干网,不包含运营商公网部分。 2、设备名称均使用拓扑上名称改名,并且区分大小写。 3、整张拓扑均使用私网地址进行配置。 4、整张网络中,运行OSPF协议或者BGP协议…...

牛客网Verilog刷题——VL46
牛客网Verilog刷题——VL46 题目解析答案 题目 根据题目提供的双口RAM代码和接口描述,实现同步FIFO,要求FIFO位宽和深度参数化可配置。电路的接口如下图所示。 双口RAM端口说明: 同步FIFO端口说明: 双口RAM代码如下ÿ…...

C/C++开源库推荐
C/C开源库推荐 主要都是平常用到的,包含windows开发、android开发、后台开发、音视频开发、深度学习等等最后还附带几个其他语言开发的比较好的项目 GUI开发 qt 跨平台开发库,内部封装了各种跨平台工具,但是大多数情况下都被用作开发跨平台…...

git常用命令速查表
1.git add -u [<路径>]: 把<路径>中所有跟踪(tracked)文件中被修改过或已删除文件的信息添加到索引库。它不会处理未跟踪(untracked)的文件。省略<路径>表示:即当前目录。 2.git add -a [<路径&…...

让两个文件夹里的图片名字一模一样
为了做测试集,对应数据和真值 import os import datetimeimage_names os.listdir(r\Images) #print(image_names) #print(len(image_names))mask_names os.listdir(rG:\Mask) #print(mask_names) #print(len(mask_names))#根据你提供的文件名排序结果来看,问题可…...
会议OA系统会议管理模块开发思路(layui搭建)
目录 一.为什么要进行开发 1.开发目的 2.项目流程 A.发起会议请求过程 1.首先实现我们的多选下拉框功能! 2.时间组件功能,并且提交我们新增加的会议内容 3.在进行发起会议编码时遇到的问题,BUG 3.1.有点时候js访问不到路径 3.2在增加…...

rsync 远程同步
目录 一、Rsync 简介 二、同步方式 备份的方式 三、常用Rsync命令 四、配置源的两种表达方法 五、配置服务端与客户端的实验 启动 rsync 服务程序 发起端(192.168.158.21) 编辑 六. 发起端(客户端)配置 rsyncinotify c…...
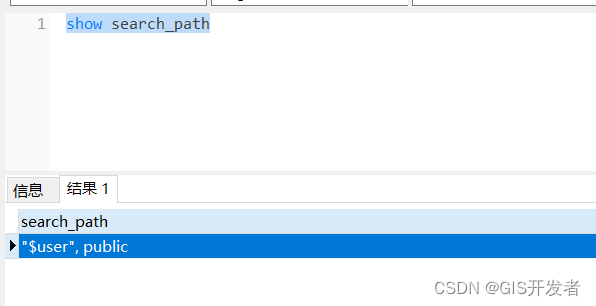
PostgreSQL数据库中,查询时提示表不存在的解决办法
最近遇到一个奇怪的问题,以前从来没有遇到过,在postgres SCHEMA下执行select * from table1语句时,提示表不存在,而实际这个表确是存在的,只不过是在public SCHEMA下。在public SCHEMA下执行这个sql语句是没有问题的。…...

视频传输网安全防护体系
在电脑、手机信息安全保护得到广泛关注和普及的今天,监控摄像头等设备的安全防护仍为大众所忽略,大量视频监控网络的前端设备和数据没有任何保护,完全暴露在互联网中。 前端IP接入设备与后端业务系统处于直连状态,一旦有攻击者或…...
C# Blazor 学习笔记(1):Blazor基础语法,组件化和生命周期
文章目录 前言基础语法路由Page 页面元素条件生成if / elseforforeach 绑定参数绑定(赋值,单向)参数绑定(双向)事件绑定字典绑定 attributes 组件化如何使用Parameter 参数注入使用回调函数组件声明回调组件注入回调组…...
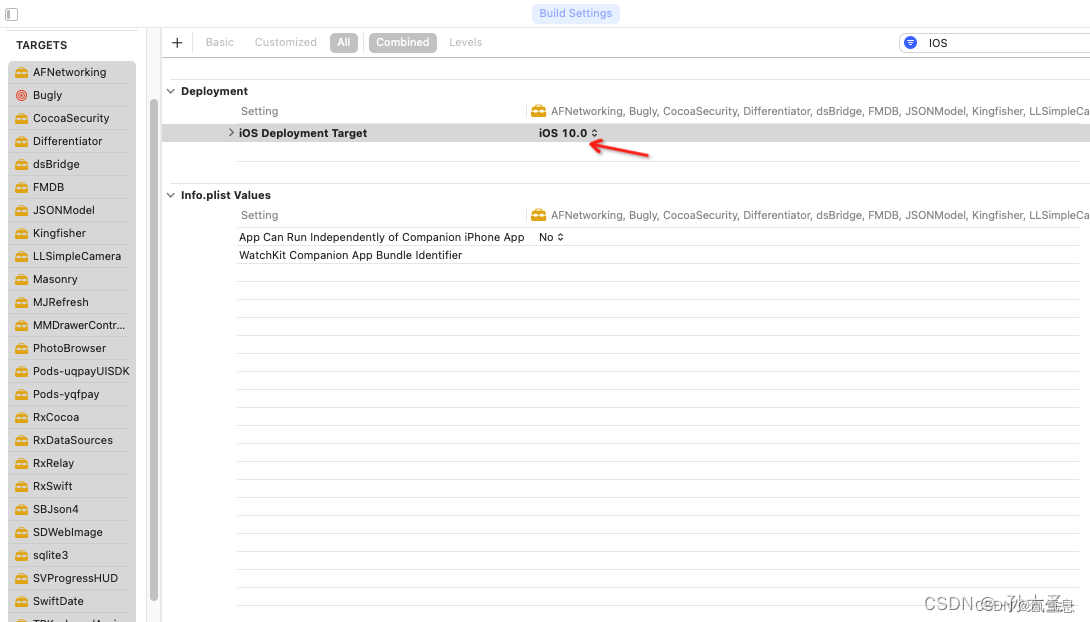
flutter 导出iOS问题2
问题1:The Swift pod FirebaseCoreInternal depends upon GoogleUtilities, which does not define modules. To opt into those targets generating module maps (which is necessary to import them from Swift when building as static libraries) 参考 正如上图报错第三方…...

syn报文什么时候会被丢弃?
开启tcp_tw_recycle且在NAT下 tcp_tw_recycle重复利用time_wait sockets,会记录最近的连接时间戳,并丢弃远程主机(PAWS机制)所有不严格大于该时间戳的报文。这意味着如果主机在nat下,那么该nat下所有设备将会受影响 TCP半连接队列满了 在半…...

【C++】开源:Linux端V4L2视频设备库
😏★,:.☆( ̄▽ ̄)/$:.★ 😏 这篇文章主要介绍Linux端V4L2视频设备库。 无专精则不能成,无涉猎则不能通。——梁启超 欢迎来到我的博客,一起学习,共同进步。 喜欢的朋友可以关注一下,下…...

基于数据驱动的多尺度表示的信号去噪统计方法研究(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭&a…...

【Golang】Golang进阶系列教程--Go 语言 map 如何顺序读取?
文章目录 前言现象原因如何顺序读取推荐阅读 前言 Go 语言中的 map 是一种非常强大的数据结构,它允许我们快速地存储和检索键值对。 然而,当我们遍历 map 时,会有一个有趣的现象,那就是输出的键值对顺序是不确定的。 现象 先看…...
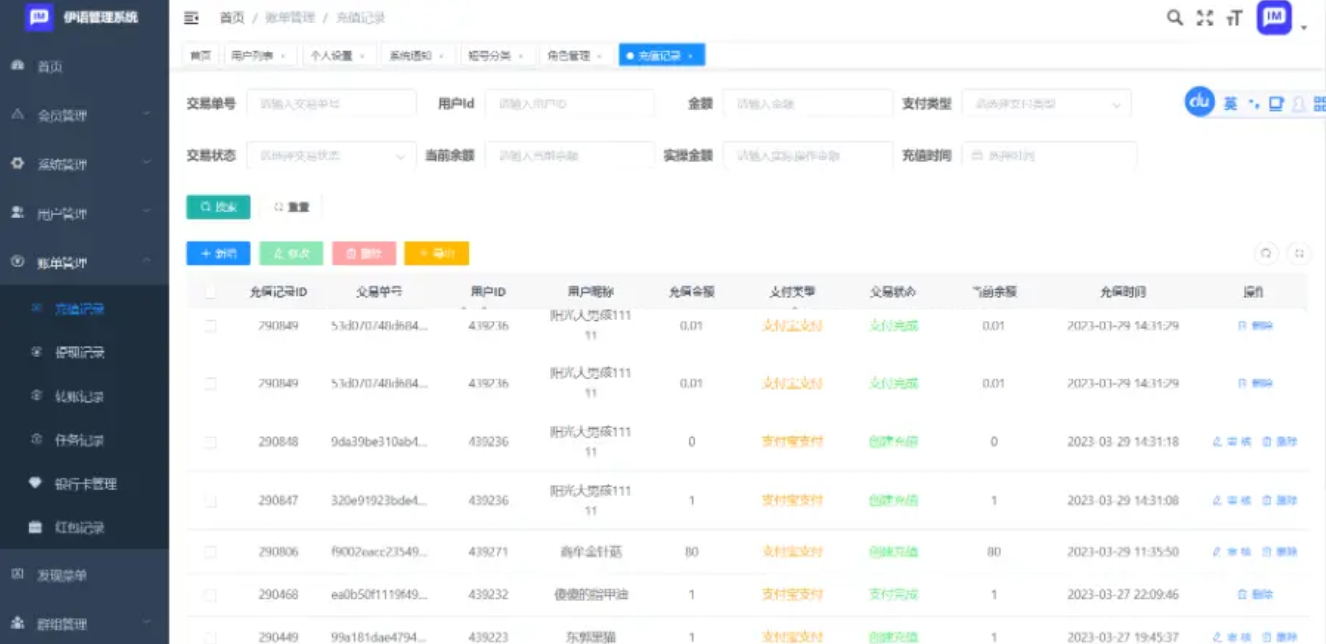
伊语IM即时通讯源码/im商城系统/纯源码IM通讯系统安卓+IOS前端纯原生源码
伊语IM即时通讯源码/im商城系统/纯源码IM通讯系统安卓IOS前端纯原生源码, 后端是java源码。...

Claude API钩子框架设计:非侵入式中间件与生命周期管理实践
1. 项目概述与核心价值最近在折腾一些AI应用开发,发现一个挺有意思的现象:很多开发者想给Claude API的调用过程加点“料”,比如在请求发出前或收到响应后,自动执行一些自定义逻辑。可能是为了日志记录、数据清洗、请求重试&#x…...

大语言模型长上下文建模:从注意力优化到Mamba架构的工程实践
1. 项目概述:为什么长上下文建模是LLM的“圣杯”?如果你在过去一年里深度使用过任何主流的大语言模型,无论是ChatGPT、Claude还是开源的Llama、Qwen,一个共同的痛点一定让你印象深刻:“它好像不记得我们之前聊了什么”…...

基于Claude的AI招聘系统:从简历解析到智能评估全流程实践
1. 项目概述:当Claude成为你的招聘官最近在GitHub上看到一个挺有意思的项目,叫“hire-from-claude”。光看名字,你可能会觉得有点玄乎,难道是要让AI来面试和招聘人类?其实,这个项目的核心思路,是…...

量子退火与经典优化结合的金融投资组合优化实践
1. 量子退火与经典优化结合的金融投资组合优化实践在金融投资领域,如何构建最优投资组合一直是核心挑战。传统方法如现代投资组合理论(MPT)和均值-方差优化(MVO)虽然奠定了理论基础,但在处理大规模资产配置时往往面临计算效率瓶颈。近年来,量…...

Taotoken API Key精细化管理与审计日志的实际价值
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Taotoken API Key精细化管理与审计日志的实际价值 在团队协作中引入大模型能力,往往伴随着对资源使用安全性与可控性的…...
)
FPGA驱动ADS1256的ADC精度优化实战(三)
1. 硬件连接优化:从杜邦线到PCB布局的精度跃升 第一次用杜邦线连接FPGA和ADS1256时,我测得的电压误差居然有30mV,这让我差点怀疑人生。后来把万用表直接怼到ADC引脚上,才发现杜邦线本身就有5-8mV的压降波动。这种看似微不足道的干…...

Filecoin挖矿硬件怎么选?用Lotus-bench实测RTX 2080 Ti到GTX 1060的密封性能
Filecoin挖矿硬件实战指南:从GPU选型到Lotus-bench深度优化 在Filecoin挖矿生态中,GPU性能直接决定了密封效率和区块奖励获取能力。面对市场上从高端RTX 2080 Ti到入门级GTX 1060的各类显卡,矿工往往陷入选择困境——官方推荐列表中的参数是否…...

避开这些坑,你的YOLO论文才能发得快!目标检测老鸟的实战避坑与效率工具清单
YOLO论文高效产出指南:目标检测老手的避坑策略与工具链实战 实验室的灯光在凌晨三点依然亮着,屏幕上YOLOv8的loss曲线却像心电图一样毫无规律地跳动着。这已经是本周第三次复现顶会论文失败,而距离截稿日期只剩三周。如果你也经历过这种"…...

RK3588 NPU部署YOLOv8全流程:从ONNX转换到板端C++/Python推理优化
1. 项目概述:为什么要在RK3588上部署YOLOv8?最近在边缘计算项目里,我遇到了一个典型的需求:客户需要在本地设备上实时分析摄像头画面,识别特定物体并分割出它们的轮廓,同时要求设备功耗低、体积小、成本可控…...
可穿戴智能服饰制作:NeoPixel灯带与Circuit Playground的集成实践
1. 项目概述:当可穿戴电子遇上创意服饰如果你和我一样,既着迷于微控制器上跑起的第一行代码,又无法抗拒布料、针线和那些闪闪发光的小玩意儿,那么这个项目就是为你准备的。将NeoPixel灯带和Circuit Playground微控制器“缝”进一件…...