【unity】Pico VR 开发笔记(基础篇)
Pico VR 开发笔记(基础篇)
XR Interaction Tooikit 版本 2.3.2
一、环境搭建
其实官方文档已经写的很详细了,这里只是不废话快速搭建,另外有一项官方说明有误的,补充说明一下,在开发工具部分说明
插件安装——安装pico的sdk和XR Interaction Tooikit
环境配置——在场景里添加头显和手柄,并进行配置和项目配置
开发工具——Pico提供的串流开发工具,可以在不打包的情况的,使用手柄和头显进行调试。
1、插件安装
pico SDK安装
pico SDK下载地址:SDK - PICO 开发者平台 (pico-interactive.com)
SDK下载后解压
打开unity→Window→PackgeManager→Add Package From disk(左上角+)→选择解压后文件里的package.json

XR Interaction Tooikit安装
在packgeManager里搜索XR Interaction Tooikit
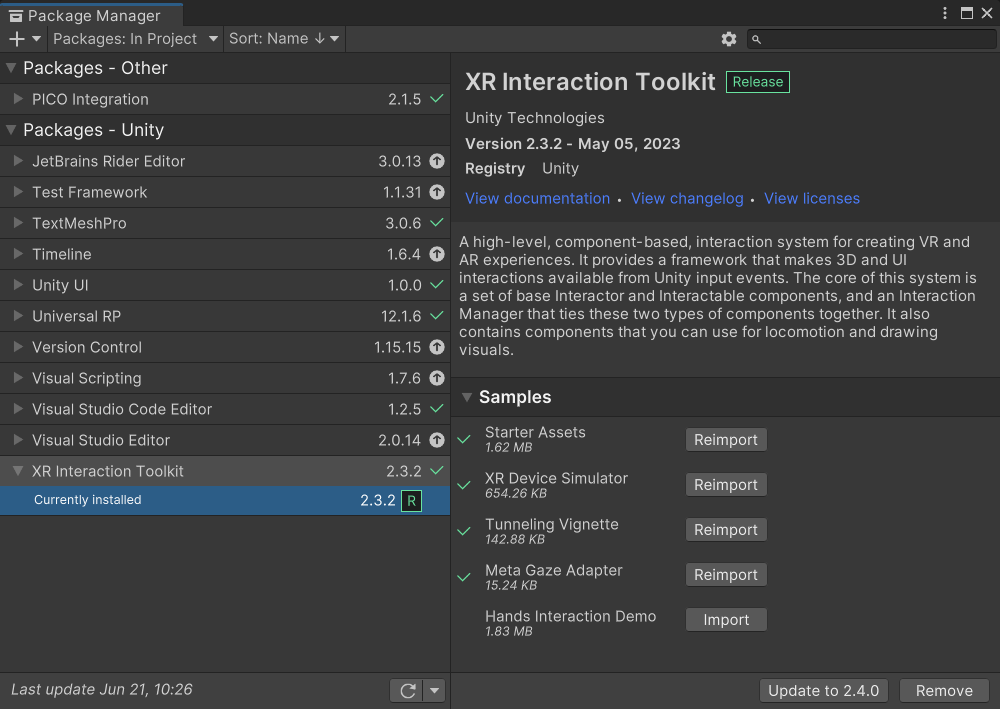
选择版本尽量高版本,不要低于2.1.0。
打开Samples 面板,导入 Starter Assets、**XR Device Simulater **和 Tunneling Vignette。
2、环境配置
场景配置
添加XR Origin:Hierarchy→Add(左上角+)→XR→XR Origin(VR)
手柄设置
-
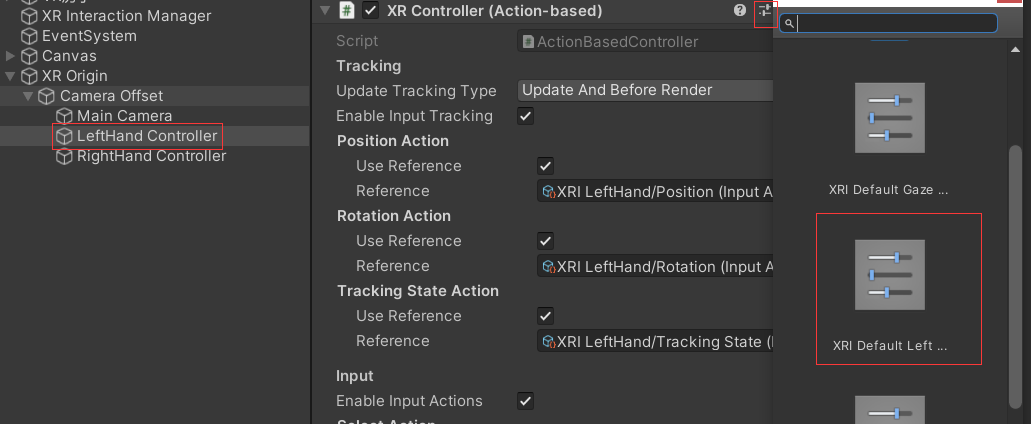
选中Hierarchy的XR Origin子物体LeftHand Controller
-
配置LeftHand Controller的控件XR Controller,点击在右上角的预设,选择XRI Default Left Controller (右手柄同样配置,选择XRI Default Right Controller )
-
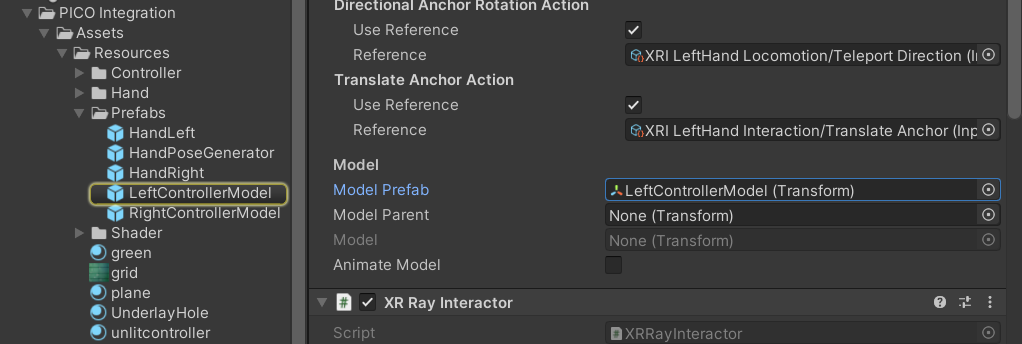
选择手柄模型,在XR Controller的Model Prefab选择LeftControllerModel(Tranform)
打包设置
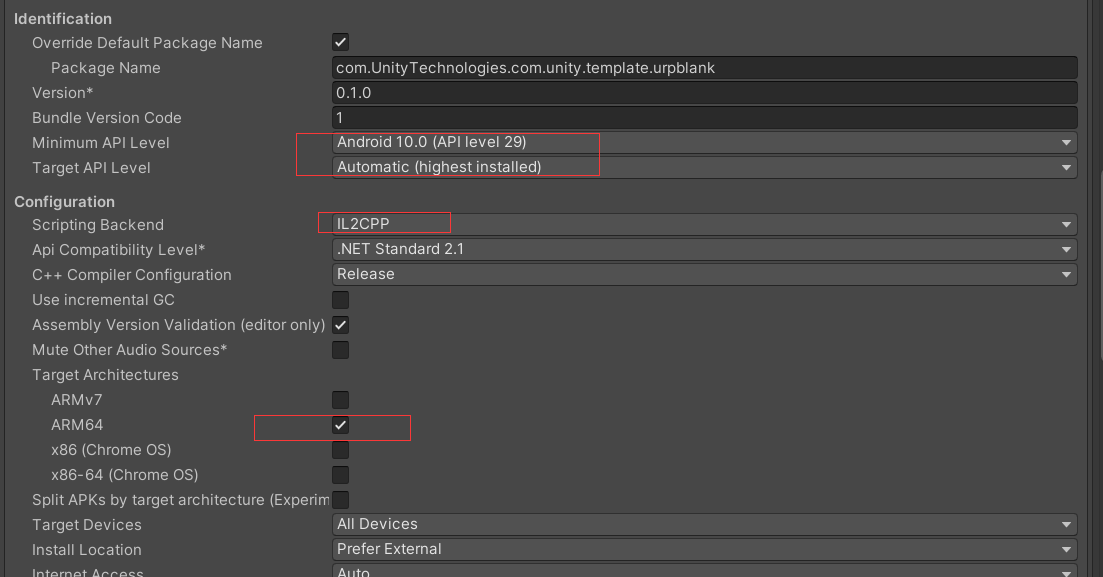
选择:Edit→Player→settings for Android→other Setting
Minimum API Level 选择Android 10.0
Target API Level 选择Automatic(Highest installed)
Scripting Backend 选择IL2CPP
勾选ARM64
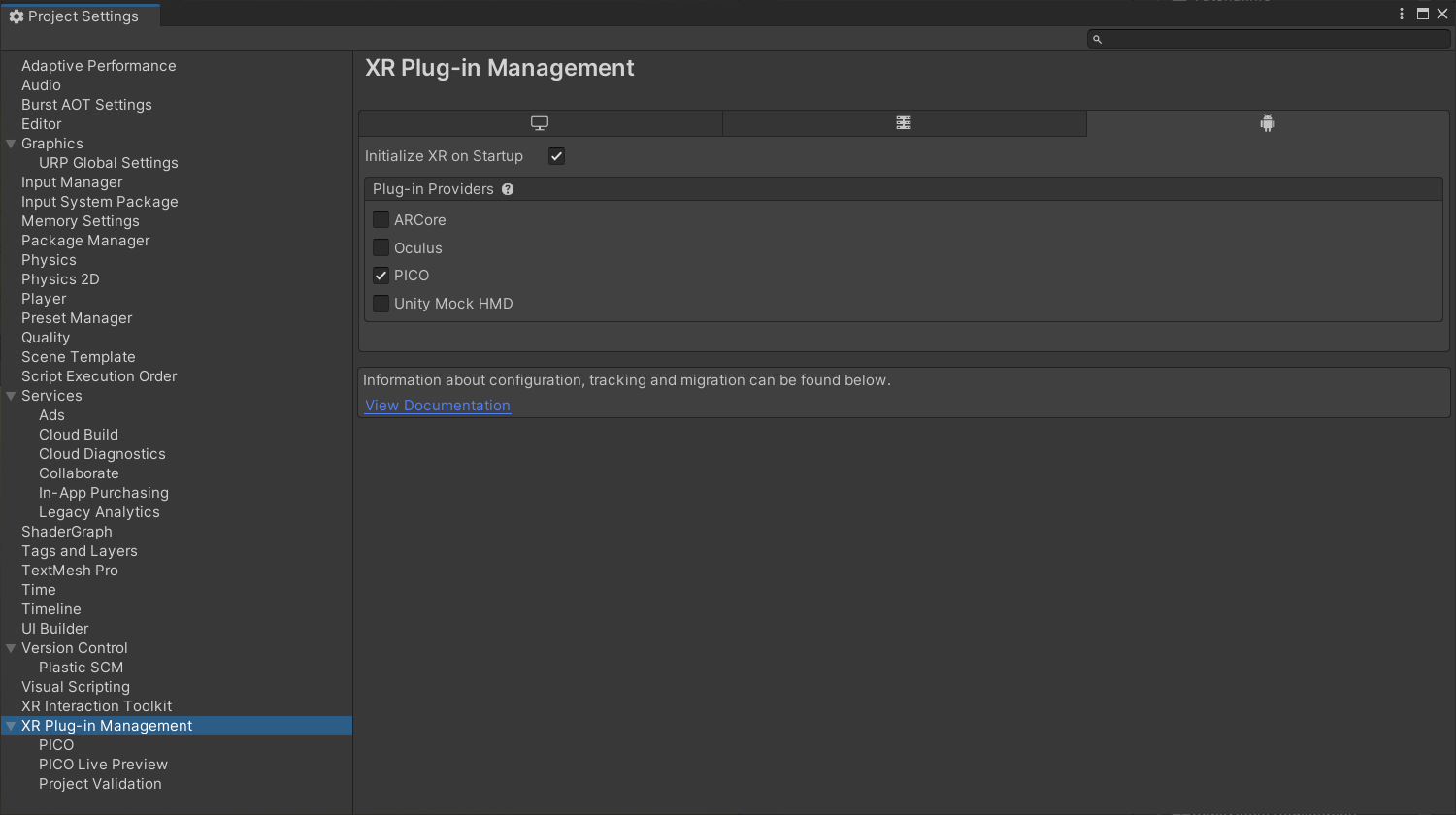
选择:Edit→Project Settings→XR Plug-in Management→Android Standalone Settings→选择PICO
3、开发工具
SDK安装
下载地址:SDK - PICO 开发者平台 (PICO Unity Live Preview Plugin)
SDK下载后解压
打开unity→Window→PackgeManager→Add Package From disk(左上角+)→选择解压后文件里的package.json

windows下载客户端
下载地址:SDK - PICO 开发者平台 (PICO Developer Center)
在本地安装后会安装steam串流工具
为一体机开启开发者模式
- 开启 PICO VR 一体机。
- 前往 设置 > 通用。
- 射线对准 设置 字段并连续点击多次,直到左侧导航栏下方出现 开发者 选项。
- 点击 开发者,进入开发者选项界面。
- 打开右上角的 USB 调试开关。
*这里官方文档有误,开启开发者模型要多次点击设置键
项目设置

选择:Edit→Project Settings→XR Plug-in Management→ PC Standalone Settings→选择 PICO Live Preview
二、开发
1、手柄输入
得到手柄
InputDevice deviceLeft;//左手柄InputDevice deviceRight;//右手柄private void Start(){deviceLeft = InputDevices.GetDeviceAtXRNode(XRNode.LeftHand);deviceRight = InputDevices.GetDeviceAtXRNode(XRNode.RightHand);}
手柄触发核心方法 TryGetFeatureValue
手柄扳机键触发
/// <summary>/// 扳机键/// </summary>/// <param name="inputDevice">手柄</param>/// <param name="action">触发委托</param>/// <param name="Value">触发参数</param>void triggerButton(InputDevice inputDevice, ref bool Value, Action action){if (inputDevice.TryGetFeatureValue(CommonUsages.triggerButton,out Value)&&Value){action();}}
扳机键力度
/// <summary>/// 扳机键力度/// </summary>/// <param name="inputDevice">手柄</param>/// <param name="action">触发委托</param>/// <param name="Value">触发参数</param>void trigger(InputDevice inputDevice, ref float Value, Action<float> action){if (inputDevice.TryGetFeatureValue(CommonUsages.trigger, out Value)&& !Value.Equals(0)){action(Value);}}
抓握键
/// <summary>/// 抓握键/// </summary>/// <param name="inputDevice"></param>/// <param name="action"></param>/// <param name="Value"></param>void gripButton(InputDevice inputDevice, ref bool Value, Action action){if (inputDevice.TryGetFeatureValue(CommonUsages.gripButton, out Value) && Value){action();}}
抓握键力度
/// <summary>/// 抓握键力度/// </summary>/// <param name="inputDevice"></param>/// <param name="action"></param>/// <param name="Value"></param>void grip(InputDevice inputDevice, ref float Value, Action<float> action){if (inputDevice.TryGetFeatureValue(CommonUsages.grip, out Value) && !Value.Equals(0)){action(Value);}}
摇杆方向
/// <summary>/// 摇杆方向/// </summary>/// <param name="inputDevice"></param>/// <param name="action"></param>/// <param name="Value"></param>void primary2DAxis(InputDevice inputDevice, ref Vector2 Value, Action<Vector2> action){if (inputDevice.TryGetFeatureValue(CommonUsages.primary2DAxis, out Value) && !Value.Equals(Vector2.zero)){action(Value);}}
摇杆
/// <summary>/// 摇杆/// </summary>/// <param name="inputDevice"></param>/// <param name="Value"></param>/// <param name="action"></param>void primary2DAxisClick(InputDevice inputDevice, ref bool Value, Action action){if (inputDevice.TryGetFeatureValue(CommonUsages.primary2DAxisClick, out Value) && Value){action();}}
X/A
/// <summary>/// X/A/// </summary>/// <param name="inputDevice"></param>/// <param name="Value"></param>/// <param name="action"></param>void primaryButton(InputDevice inputDevice, ref bool Value, Action action){if (inputDevice.TryGetFeatureValue(CommonUsages.primaryButton, out Value) && Value){action();}}
Y/B
/// <summary>/// Y/B/// </summary>/// <param name="inputDevice"></param>/// <param name="Value"></param>/// <param name="action"></param>void secondaryButton(InputDevice inputDevice, ref bool Value, Action action){if (inputDevice.TryGetFeatureValue(CommonUsages.secondaryButton, out Value) && Value){action();}}
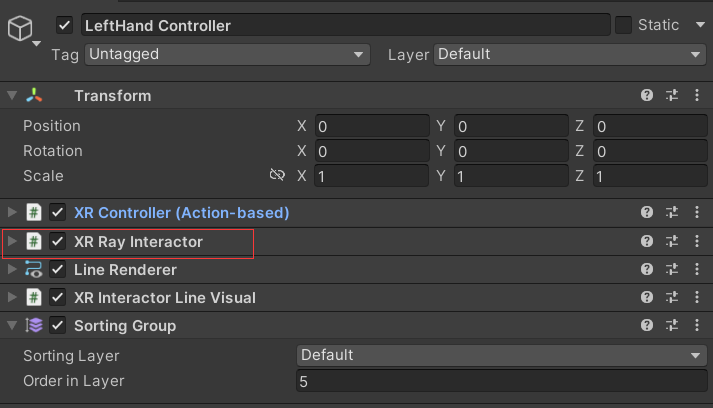
2、射线
得到射线的方法
XRRayInteractor.TryGetCurrent3DRaycastHit(out hit)
XRRayInteractor是手柄上挂载的XRRayInteractor脚本。
Demo
public XRRayInteractor rayInteractor;RaycastHit hit;Vector3 getRayPoint(){if (rayInteractor.TryGetCurrent3DRaycastHit(out hit)){string name = hit.collider.name;Debug.Log(name);return hit.point;}else{return Vector3.zero;}}
补充设置
射线的类型
| 类型 | 说明 |
|---|---|
| Staight Line | 直线 |
| Projectile Curve | 抛物线 |
| Bezier Curve | 贝塞尔曲线 |
修改方法
rayInteractor.lineType = XRRayInteractor.LineType.ProjectileCurve;
不同类型的射线还有自己的参数可以修改,比如Stailght Line的MaxRaycastDistance(最远射线距离)和ProjectileCurve的Additional Flight Time(射线飞行时间)都可以直接赋值。
有效射线和无效射线
当射线触碰到可触发的UI或者模型时,射线为有效射线,反馈则是使用了ValidColorGradient。否则是使用InvalidColorGradient。
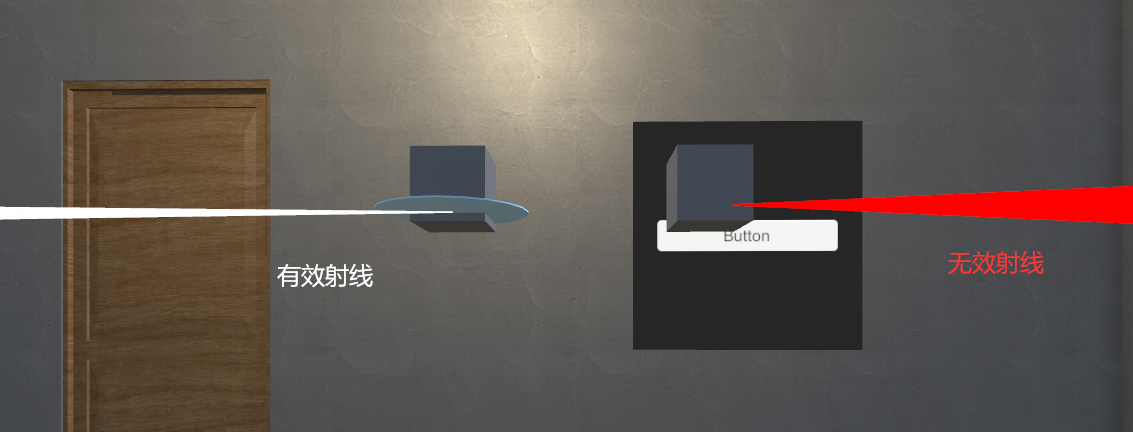
无效射线和有效射线触碰到有碰撞的模型时同样可以返回RaycastHit,区别在XR射线本身的设置上,比如碰撞Reticle。
实现有效碰撞,需要另外在模型上添加Tracked Device Physics Raycaster脚本等
Reticle (十字线)
Reticle 是射线和模型(UI)碰撞的点。

添加方法:
在手柄的上找到XR Interactor Line Visual脚本,创建Reticle 预制体后直接添加上。
3、UI触发
触发条件
手柄射线要触发到UI,在完成VR基础场景搭建的前提下,需要挂载两个脚本。
在Canvas上增加Tracked Device Graphic Raycaster
替换EventSystem上的Standalone Input Module为XR UI Input Module(模型上添加的Tracked Device Physics Raycaster脚本也是受XR UI Input Module影响的)
注意事项
Canvas的Order in Layer 最好设置为负值。如果为0或者正值,十字线可能会被UI遮挡。
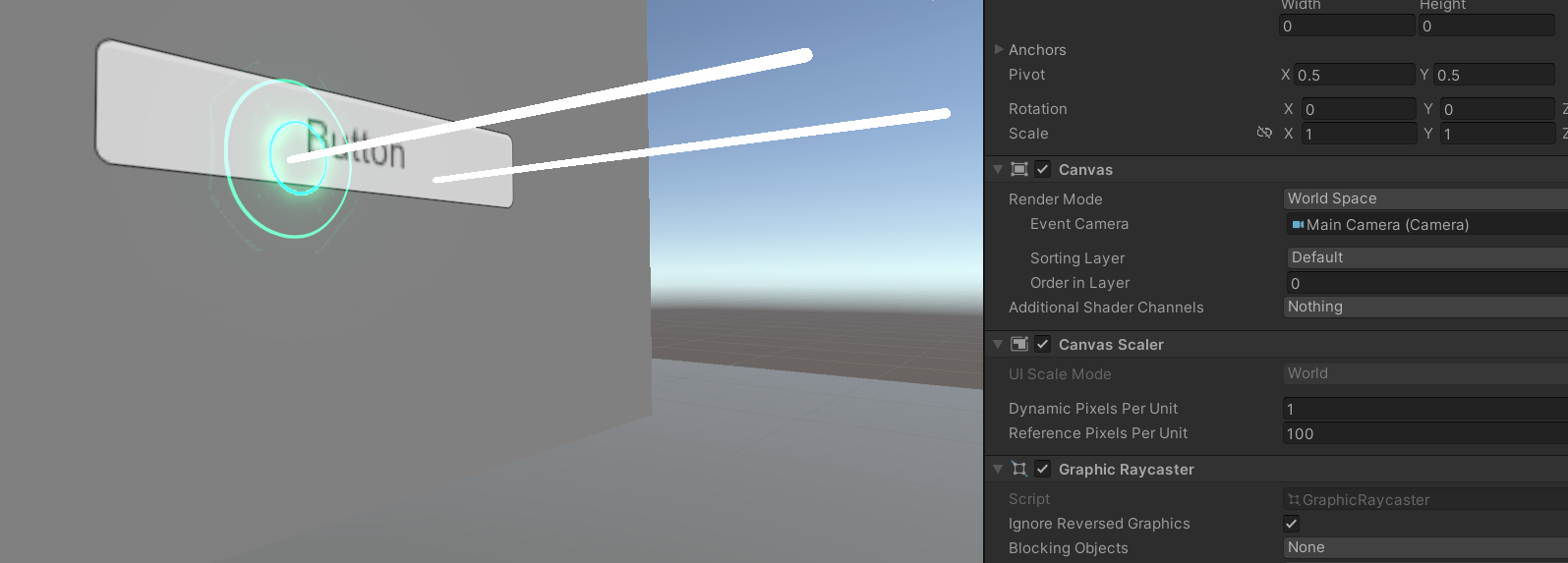
为0时
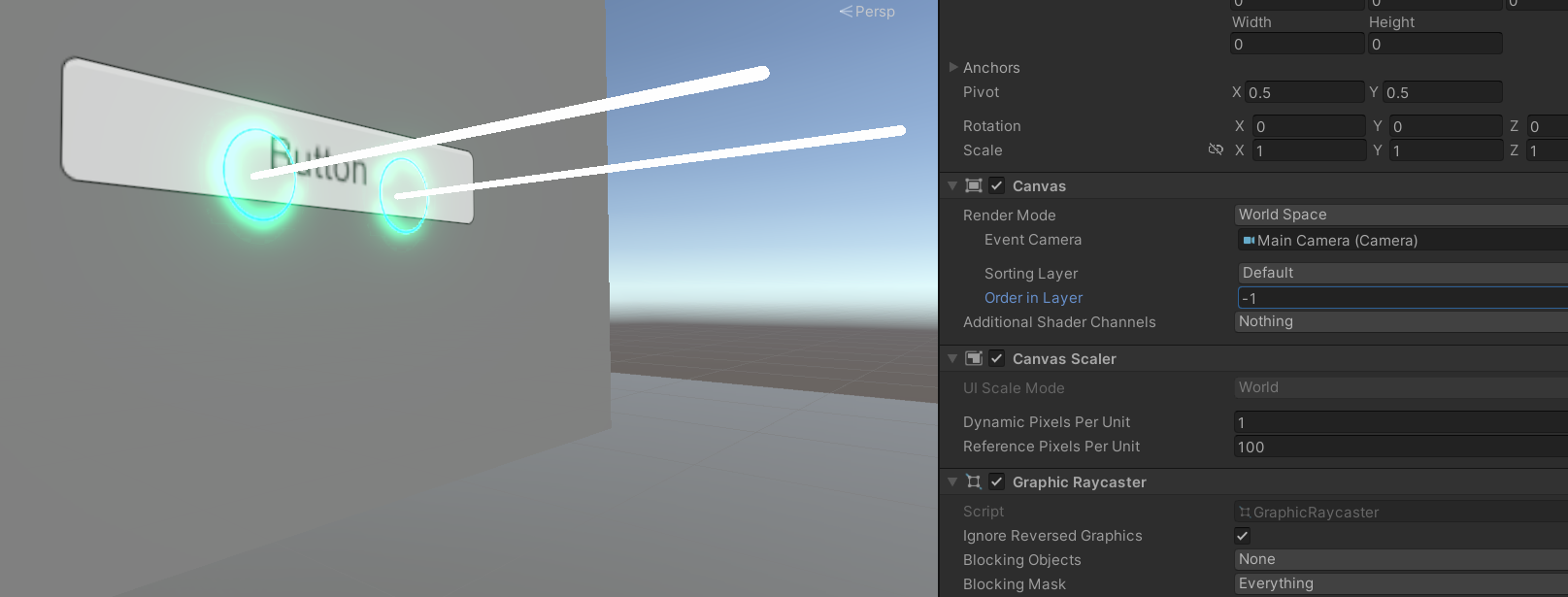
为-1时
相关文章:
【unity】Pico VR 开发笔记(基础篇)
Pico VR 开发笔记(基础篇) XR Interaction Tooikit 版本 2.3.2 一、环境搭建 其实官方文档已经写的很详细了,这里只是不废话快速搭建,另外有一项官方说明有误的,补充说明一下,在开发工具部分说明 插件安装——安装pico的sdk和XR…...
竞争之王CEO商战课,聚百家企业在京举行
竞争之王CEO商战课,于2023年7月29-31日在北京临空皇冠假日酒店举办,近百家位企业家齐聚一堂,共享饕餮盛宴。 竞争之王CEO商战课是打赢商战的第一课。 竞争环境不是匀速变化,而是加速变化。 在未来的市场环境中,企业间…...
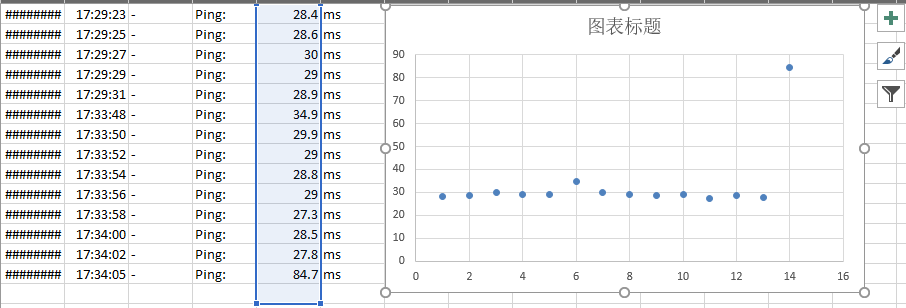
【shell】获取ping的时延数据并分析网络情况及常用命令学习
文章目录 获取ping的时延数据并分析网络情况|、||、&、&&辨析teetailkillall 获取ping的时延数据并分析网络情况 网络情况经常让我们头疼,每次都需要手动在终端ping太麻烦了,不如写个脚本ping并将数据带上时间戳存入文件,然后也…...
(内附封面))
石子合并一章通(环形石子合并,四边形不等式,GarsiaWachs算法)(内附封面)
[NOI1995] 石子合并 题目描述 在一个圆形操场的四周摆放 N N N 堆石子,现要将石子有次序地合并成一堆,规定每次只能选相邻的 2 2 2 堆合并成新的一堆,并将新的一堆的石子数,记为该次合并的得分。 试设计出一个算法,计算出将 …...
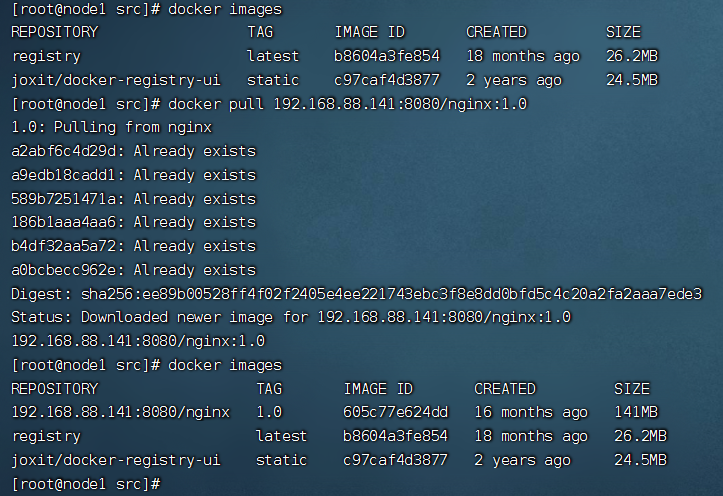
Docker快速入门笔记
Docker快速入门 前言 当今软件开发领域的一股热潮正在迅速兴起,它融合了便捷性、灵活性和可移植性,让开发者们欣喜若狂。它就是 Docker!无论你是一个初学者,还是一位经验丰富的开发者,都不能错过这个引领技术浪潮的工…...
【Excel】记录Match和Index函数的用法
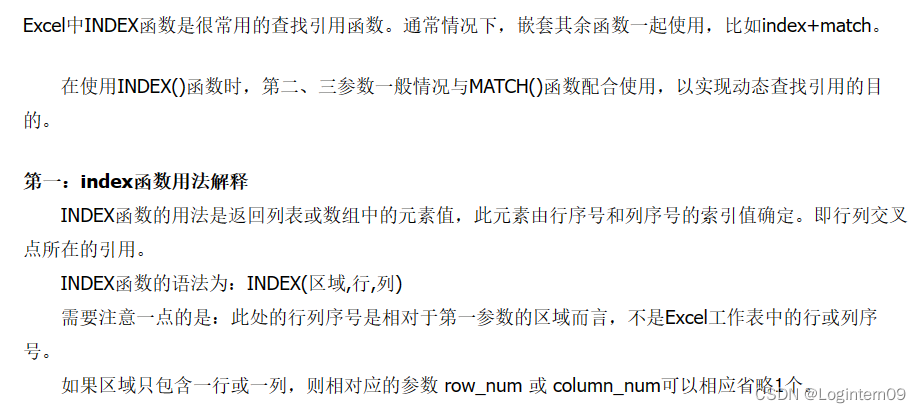
最近一直用到的两个处理EXCEL表格数据的函数向大家介绍一下,写这篇博文的目的也是为了记录免得自己忘记了,嘻嘻。 先上百度的链接 Match函数的用法介绍:https://jingyan.baidu.com/article/2fb0ba40b4933941f3ec5f71.html 小结:…...
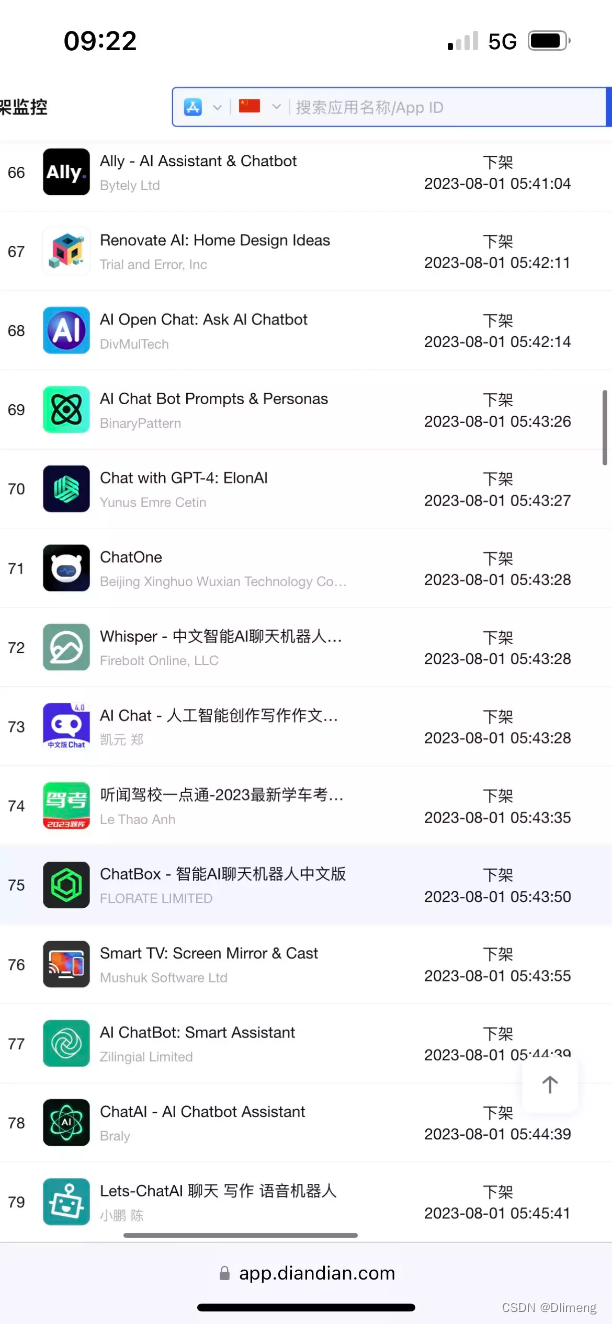
SolidUI社区-从开源社区角度思考苹果下架多款ChatGPT应用
文章目录 背景下架背景下架原因趋势SolidUI社区的未来规划结语如果成为贡献者 背景 随着文本生成图像的语言模型兴起,SolidUI想帮人们快速构建可视化工具,可视化内容包括2D,3D,3D场景,从而快速构三维数据演示场景。SolidUI 是一个创新的项目…...
插入排序讲解
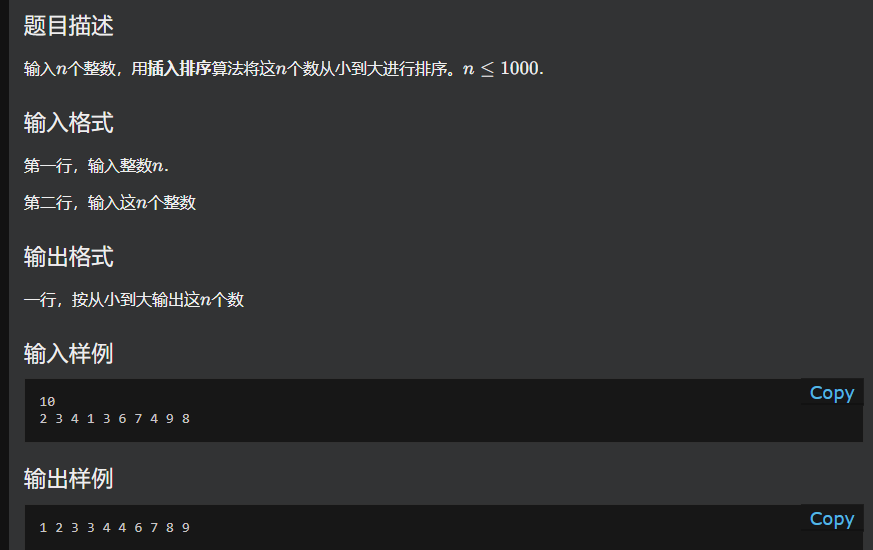
插入排序(Insertion-Sort)一般也被称为直接插入排序。对于少量元素的排序,它是一个有效的算法。插入排序是一种最简单的排序方法,它的基本思想是将一个记录插入到已经排好序的有序表中,从而一个新的、记录数增1的有序表…...

杀疯了的ChatGPT——开启AI智能交流新纪元 「文末有彩蛋」
欢迎打开 ChatGPT 的新世纪大门 🌍 目录 😊 引言😎 ChatGPT 的高级之处1. 巨大的模型规模2. 广泛的知识覆盖3. 零样本学习4. 多语言支持5. 上下文感知对话 🤖 如何使用 ChatGPT1. 智能助手2. 个性化交互3. 语言学习伙伴4. 创造性写…...

web爬虫第五弹 - JS逆向入门(猿人学第一题)
0- 前言 爬虫是一门需要实战的学问。 而对于初学者来说,要想学好反爬,js逆向则是敲门砖。今天给大家带来一个js逆向入门实例,接下来我们一步一步来感受下入门的逆向是什么样的。该案例选自猿人学练习题。猿人学第一题 1- 拿到需求 进入页面…...

P5731 【深基5.习6】蛇形方阵
题目描述 给出一个不大于 9 9 9 的正整数 n n n,输出 n n n\times n nn 的蛇形方阵。 从左上角填上 1 1 1 开始,顺时针方向依次填入数字,如同样例所示。注意每个数字有都会占用 3 3 3 个字符,前面使用空格补齐。 输入格式…...
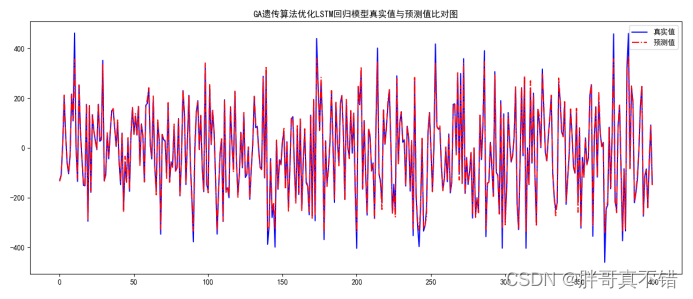
Python实现GA遗传算法优化循环神经网络回归模型(LSTM回归算法)项目实战
说明:这是一个机器学习实战项目(附带数据代码文档视频讲解),如需数据代码文档视频讲解可以直接到文章最后获取。 1.项目背景 遗传算法(Genetic Algorithm,GA)最早是由美国的 John holland于20世…...

ESD防静电监控系统在SMT产线中的应用案例
作为电子厂的关键制造环节之一,SMT(表面贴装技术)产线的效率和质量对企业的竞争力至关重要。为了提高生产线的管理效率和保障生产环境的质量,许多电子厂开始采用MES生产管理系统和ESD防静电监控系统的综合解决方案。 在SMT产线中安…...

Vue+Nodejs+Express+Minio 实现本地图片上传
安装Minio,Minio server和Minio client都要下载可以自定义安装目录 安装完成之后,可以将minio配置成环境变量方便使用 配置了环境变量启动命令式 minio server start,默认账号密码minioadmin和minioadmin,点击9000端口的这个链接,即可访问客户端 nodejs连接Minio,简易服务进…...
em3288 linux_4.19 第一次烧写无法进入内核的情况
1. 情况一: /DDR Version 1.11 20210818 In SRX Channel a: DDR3 400MHz Bus Width32 Col10 Bank8 Row15 CS1 Die Bus-Width16 Size1024MB Channel b: DDR3 400MHz Bus Width32 Col10 Bank8 Row15 CS1 Die Bus-Width16 Size1024MB OUT Boot1 Release Time: Jul 22 2…...

【Java多线程学习5】什么是悲观锁,什么是乐观锁?如何实现乐观锁、乐观锁存在哪些问题
【Java多线程学习5】什么是悲观锁,什么是乐观锁?如何实现乐观锁、乐观锁存在哪些问题 一、什么是悲观锁 概述 悲观锁总是假设最坏的情况,认为共享资源每次被访问的时候就会出现问题(比如共享数据被修改),所以每次在获取资源操作…...
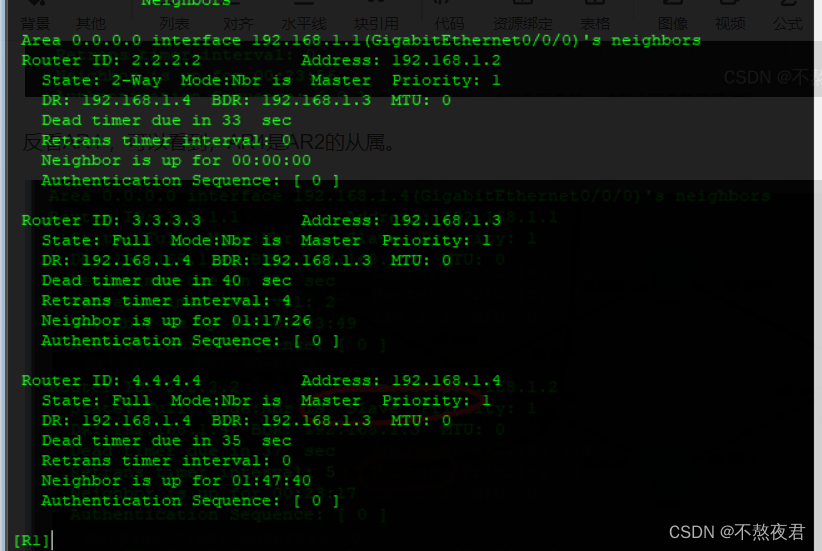
OSPF协议RIP协议+OSPF实验(eNSP)
本篇博客主要讲解单区域的ospf,多区域的仅作了解。 目录 一、OSPF路由协议概述 1.内部网关协议和外部网关协议 二、OSPF的应用环境 1.从以下几方面考虑OSPF的使用 2.OSPF的特点 三、OSPF重要基本概念 3.1,辨析邻居和邻接关系以及七种邻居状态 3…...
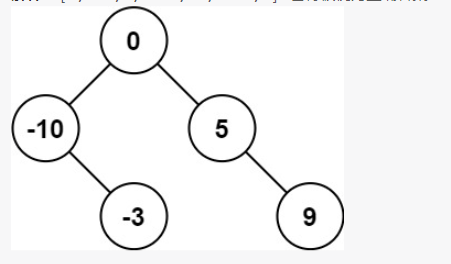
leetcode每日一练-第108题-将有序数组转换为二叉搜索树
一、思路 递归 二、解题方法 在给定中序遍历序列数组的情况下,每一个子树中的数字在数组中一定是连续的,因此可以通过数组下标范围确定子树包含的数字,下标范围记为 [left,right]。对于整个中序遍历序列,下标范围从 left0到 ri…...
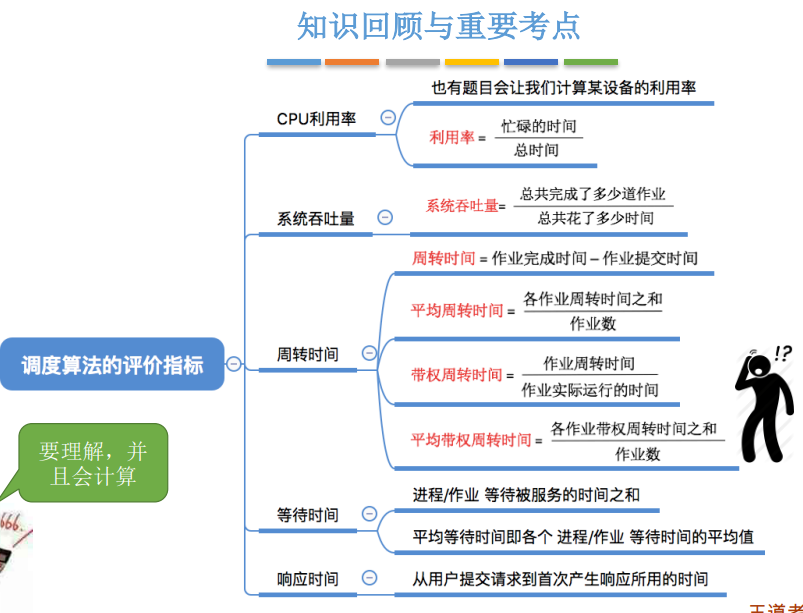
王道《操作系统》学习(二)—— 进程管理(二)
2.1 处理机调度的概念、层次 2.1.1 调度的基本概念 2.1.2 调度的三个层次 (1)高级调度(作业调度) (2)中级调度(内存调度) 补充知识:进程的挂起状态和七状态模型 &#x…...
Vulnhub: shenron: 3靶机
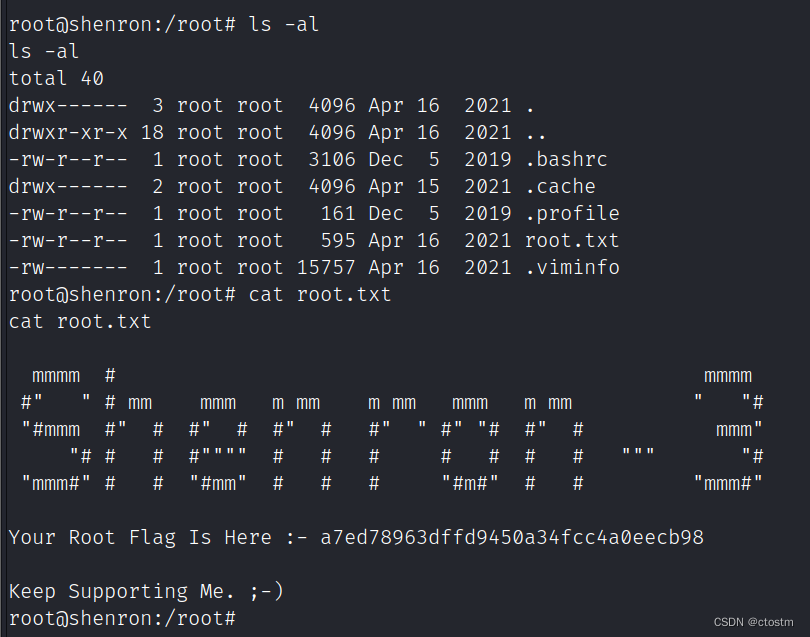
kali:192.168.111.111 靶机:192.168.111.171 信息收集 端口扫描 nmap -A -sC -v -sV -T5 -p- --scripthttp-enum 192.168.111.171 修改hosts后访问目标80端口,发现是wordpress wpscan收集目标用户,爆破出密码:ilov…...

MAX2016射频增益测量与校准技术详解
1. MAX2016射频增益测量技术解析MAX2016作为一款DC至2.5GHz双对数检测器/控制器,在射频增益测量领域展现出独特优势。其核心功能是通过两个匹配的对数放大器实时检测输入信号功率,并输出与功率差值成比例的电压信号(VOUTD)。这种架构特别适合需要快速、精…...

DXF服务端部署实战:从环境配置到异常排查的完整指南
1. 环境准备:从零搭建DXF服务端的基石 第一次部署DXF服务端的朋友们,千万别急着跑起来就完事。我见过太多人卡在环境配置这一步,折腾半天才发现是基础依赖没装全。咱们先从最底层的系统环境说起,这里我用的是CentOS 7.x系统&#…...

SITS2026 AGI原型系统接口文档首度流出,17个可调用认知原语,开发者现在接入能做什么?
第一章:SITS2026 AGI原型系统接口文档首度流出概览 2026奇点智能技术大会(https://ml-summit.org) 近日,一份标注为“SITS2026-AGI-PROTOTYPE-INTERFACE-v0.3.1-INTERNAL-DRAFT”的内部接口文档在多个AI研究社区悄然传播。该文档完整披露了面向通用人工…...

【技术解析】SwAV:用在线聚类与最优运输破解无监督视觉特征学习难题
1. SwAV:无监督视觉特征学习的破局者 想象一下你面前有100万张没有标签的图片,现在需要让AI自动学会识别其中的物体特征——这就是SwAV要解决的核心问题。传统方法就像让一个孩子通过反复对比无数相似图片来学习,不仅效率低下,还特…...
)
Vue3 + wangEditor v5 实战:手把手教你搞定动态评论回复的富文本编辑器(附完整代码)
Vue3 wangEditor v5 实战:动态评论回复的富文本编辑器解决方案 在动态内容交互场景中,富文本编辑器的集成往往伴随着诸多挑战。想象这样一个场景:用户浏览评论区时,点击"回复"按钮需要在对应条目下动态生成编辑器&…...

N_m3u8DL-RE实战手册:3步实现智能流媒体下载,告别观看限制
N_m3u8DL-RE实战手册:3步实现智能流媒体下载,告别观看限制 【免费下载链接】N_m3u8DL-RE Cross-Platform, modern and powerful stream downloader for MPD/M3U8/ISM. English/简体中文/繁體中文. 项目地址: https://gitcode.com/GitHub_Trending/nm3…...

后端中使用SDK原生方法上链【FISCO BCOS】
创建Client的方式:先配置文件路径:初始化SDK并获取Client:BcosSDK:总管理工具Client:与区块链交互的核心对象群组1:链接到群组1的链二、三种链上合约函数调用方法 两种链状态信息获取方法获取客…...

BaiduPCS-Go 终极指南:高效命令行管理百度网盘的完整方案
BaiduPCS-Go 终极指南:高效命令行管理百度网盘的完整方案 【免费下载链接】BaiduPCS-Go iikira/BaiduPCS-Go原版基础上集成了分享链接/秒传链接转存功能 项目地址: https://gitcode.com/GitHub_Trending/ba/BaiduPCS-Go 还在为百度网盘的下载限速而烦恼&…...

如何快速配置雀魂AI助手Akagi:面向普通用户的完整指南
如何快速配置雀魂AI助手Akagi:面向普通用户的完整指南 【免费下载链接】Akagi 支持雀魂、天鳳、麻雀一番街、天月麻將,能夠使用自定義的AI模型實時分析對局並給出建議,內建Mortal AI作為示例。 Supports Majsoul, Tenhou, Riichi City, Amats…...

Zynq7000 OpenAMP实战避坑:从编译选项到串口调试,一次搞定R5裸机程序与Linux的‘对话’
Zynq7000 OpenAMP实战避坑指南:从编译选项到串口调试的完整解决方案 在异构计算领域,Xilinx Zynq-7000系列SoC因其独特的双核ARM Cortex-A9与可编程逻辑结合而广受欢迎。但当开发者尝试实现A9 Linux与R5裸机程序之间的通信时,往往会遇到一系…...