卡尔曼滤波算法demo
代码
learn_kalman.py
#coding=utf-8
import numpy as np
import time
from kinematic_model import freedrop
from controller import kalman_filterimport matplotlib.pyplot as plt
# 支持中文
import matplotlib as mpl
mpl.rcParams['font.family']='SimHei'
plt.rcParams['axes.unicode_minus']=False #用来正常显示负号class Scene:'''场景'''def __init__(self,windSpd=np.array([0.7,0.3,0.0]),\initialSpd=np.array([120.0,0.0,120.0])):'''我现在是一个防空兵防空炮打出一枚炮弹,真实的炮弹轨迹,它可能会受风的影响,可能会有随机因素导致偏离目标导致打不中飞机...我们可以使用指挥所观测到的炮弹轨迹,因为炮弹距离很远,所以这个观测不是很靠谱...所以我们所使用了卡尔曼滤波算法,得到了一条真实的炮弹轨迹...'''# 真实的炮弹self.realShell=freedrop.FreeDropBinder(windSpd=windSpd,initialSpd=initialSpd)# 理论上炮弹的落点self.theoShell=freedrop.FreeDropBinder(windSpd=np.array([0.0,0.0,0.0]),initialSpd=initialSpd,randRatio=0.0)# 卡卡尔曼滤波器self.kf=kalman_filter.KF_Onmi3D()self.kf.initState[3:6]=initialSpd# 绘图区self.fig=plt.figure('炮弹弹道图')self.ax = self.fig.gca(projection="3d")# 数据缓存self.realCoord=[]self.theoCoord=[]self.kalmanCoord=[]self.observeCoord=[]def UpdateData(self,delta_t=0.2):'''更新虚拟环境的数据:return:'''# 真实炮弹轨迹self.realShell.StateUpdate(delta_t=delta_t)# 理论炮弹轨迹self.theoShell.StateUpdate(delta_t=delta_t)# 观测到的炮弹轨迹self.observeCoord.append(self.realShell.position + np.random.random(3) * self.realShell.position[0]/20.0 - self.realShell.position[0]/40.0)# 卡尔曼滤波'''基于卡尔曼滤波,结合理论炮弹轨迹 对观测的炮弹轨迹进行修正'''self.kf.Predict(velocity=self.theoShell.spd)Hybrid_Position=self.kf.Update(self.observeCoord[-1])# 绘图(真实的弹道)plt.cla()self.ax.set_xlim(0, 1000)self.ax.set_ylim(-200, 200)self.ax.set_zlim(0, 300)self.ax.set_xlabel("X坐标(米)")self.ax.set_ylabel("Y坐标(米)")self.ax.set_zlabel("X坐标(米)")# 计算三个类型的炮弹self.realCoord.append(np.copy(self.realShell.position)) # 真实炮弹self.theoCoord.append(np.copy(self.theoShell.position)) # 理论模型self.kalmanCoord.append(np.copy(Hybrid_Position))self.curve2Draw=np.array(self.realCoord)self.curve2 = np.array(self.observeCoord)self.curve3 = np.array(self.theoCoord)self.curve4 = np.array(self.kalmanCoord)self.ax.plot(self.curve2Draw[:,0],self.curve2Draw[:,1],self.curve2Draw[:,2],label='真实炮弹',color='red')self.ax.scatter(self.curve2[:, 0], self.curve2[:, 1], self.curve2[:, 2],'rv+', label='炮弹观测数据', color='blue',alpha=0.5,s=1)self.ax.plot(self.curve3[:, 0], self.curve3[:, 1], self.curve3[:, 2], label='炮弹理论轨迹', color='green', alpha=0.5)self.ax.plot(self.curve4[:, 0], self.curve4[:, 1], self.curve4[:, 2], label='炮弹融合轨迹', color='yellow', alpha=1.0)self.ax.legend()plt.pause(0.05)# 开始模拟环境
#plt.ion()s=Scene()for i in range(1000):if s.realShell.position[2]<0: breaks.UpdateData()
plt.ioff()
plt.show()freerop.py
#coding=utf-8
import timeimport numpy as np
'''3D自由落体模型(含有风阻)
'''class FreeDropBinder:'''为实体绑定自由落体属性'''def __init__(self,windSpd=np.array([0.0,0.0,0.0]),resRatio=0.0004,G=9.8,initialPos=np.array([0.0,0.0,0.0]),initialSpd=np.array([0.0,0.0,0.0]),randRatio=0.1):''':param windSpd: 风速(三维):param resRatio: 风阻比例(全向):param G: 重力加速度:param initialPos: 物体初始位置:param initialSpd: 物体初始速度'''self.position=initialPosself.spd=initialSpdself.windSpd=windSpdself.resRatio=resRatioself.G=Gself.randRatio=randRatiodef StateUpdate(self,delta_t=0.05,driveForce=np.array([0.0,0.0,0.0])):'''更新实体位置信息:param delta_t::return:'''# 重力因素self.spd+=np.array([0,0,-self.G*delta_t])# 风阻因素self.spd=np.where(self.spd>0,self.spd-self.resRatio*self.spd*self.spd,self.spd)self.spd = np.where(self.spd <= 0, self.spd + self.resRatio * self.spd * self.spd, self.spd)# 风力因素# 驱动因素self.spd+=(driveForce+self.windSpd)*delta_t# 随机因素self.spd+=(np.random.rand(3)-0.5)*2*self.randRatio*delta_t# 更新坐标self.position=self.position+self.spd*delta_tif __name__=='__main__':box=FreeDropBinder(initialSpd=np.array([10.0,0.0,100.0]))for i in range(30):print(box.Update())
kalman_filter.py
import numpy as np
import matplotlib.pyplot as pltclass KF_Onmi3D:'''三维,无方向场景下的卡尔曼滤波算法模组'''def __init__(self):# 初始状态 x y z vx vy vzself.initState=np.array([0, 0, 0, 0, 0, 0],dtype=np.float)# 初始协方差,可以看出是每个维度都是一一对应的关系'''[ 1 0 0 0 0 0 ][ 0 1 0 0 0 0 ][ 0 0 1 0 0 0 ][ 0 0 0 1 0 0 ][ 0 0 0 0 1 0 ][ 0 0 0 0 0 1 ]'''self.initCov=np.eye(6)# 状态转移矩阵self.stateTransMatrix=np.array([[1,0,0,1,0,0],[0,1,0,0,1,0],[0,0,1,0,0,1],[0,0,0,1,0,0],[0,0,0,0,1,0],[0,0,0,0,0,1]],dtype=np.float)# 观测矩阵 X Y Z Vx Vy Vzself.observeMatrix=np.array([[1, 0, 0, 0, 0, 0],[0, 1, 0, 0, 0, 0],[0, 0, 1, 0, 0, 0]],dtype=np.float)# 过程噪声(先设定一个初始值,这个需要跟据你系统的评估来确定)self.procNoise=np.eye(6)*0.001# 观测噪声的协方差矩阵self.observeNoiseCov=np.eye(3)*1self.InitParams()def InitParams(self):'''初始化状态变量:return:'''self.currentState=self.initState.copy()self.predictState=self.initState.copy()self.currentCov=self.initCovself.predictedCov=self.currentCovdef Predict(self,velocity=np.array([0,0,0],dtype=np.float)):'''预测过程:param v::return:'''# 基于当前的速度,预测机器人下一个状态的状态数值self.predictState=self.stateTransMatrix.dot(self.currentState)# 预测三维环境下的协方差矩阵self.predictedCov=self.stateTransMatrix.dot(self.currentCov).dot(self.stateTransMatrix.T)+self.procNoise# 把速度赋值给状态中的“速度”属性self.currentState[3:6] = velocitydef Update(self,observed_Pos=np.array([0,0,0],dtype=np.float)):'''更新数据:param observed_Pos: 带有误差的位置观测值:return:'''# 卡尔曼增益(Kalman Gain)计算'''K=\frac{估计的误差}{估计的误差+测量的误差}=\frac{\hat{P_k}C}{C\hat{P_k}C^T+Error}'''self.Kalman_Gain = self.predictedCov.dot(self.observeMatrix.T) \.dot(np.linalg.inv( \self.observeMatrix.dot(self.predictedCov).dot(self.observeMatrix.T) + self.observeNoiseCov))'''基于Kalman Gain估算当前状态'''self.currentState = self.predictState + self.Kalman_Gain.dot(observed_Pos-self.observeMatrix.dot(self.predictState))'''当前协方差估计'''self.currentCov = (np.eye(6) - self.Kalman_Gain.dot(self.observeMatrix)).dot(self.predictedCov)return self.currentState[0:3]
参考
https://www.bilibili.com/video/BV1gF411f78t/?spm_id_from=333.337.top_right_bar_window_history.content.click&vd_source=667c3d14dbb51ec849c0bc7c38329d10
相关文章:
卡尔曼滤波算法demo
代码 learn_kalman.py #codingutf-8 import numpy as np import time from kinematic_model import freedrop from controller import kalman_filterimport matplotlib.pyplot as plt # 支持中文 import matplotlib as mpl mpl.rcParams[font.family]SimHei plt.rcParams[a…...
MySQL游标(二十九)
二八佳人体似酥,腰悬利剑斩愚夫,虽然不见人头落,暗里教君骨髓枯。 上一章简单介绍了MySQL流程控制(二十八) ,如果没有看过,请观看上一章 一. 游标 一.一 什么是游标 虽然我们也可以通过筛选条件 WHERE 和 HAVING,或者是限定返回记录的关键…...
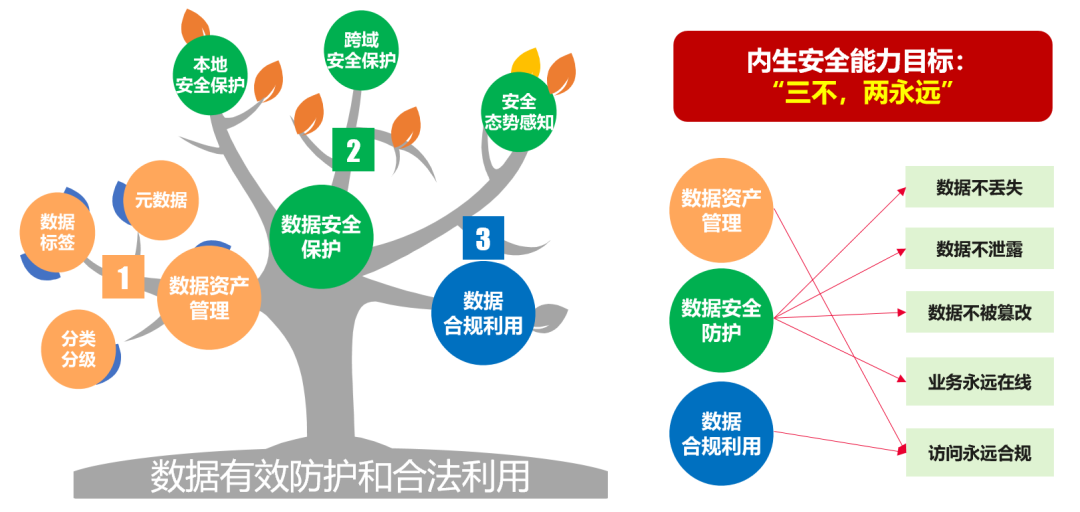
内生安全构建数据存储
一、数据安全成为防护核心,存储安全防护不容有失 1、数据作为企业的核心资产亟需重点保护,数据安全已成网络空间防护核心 2、国家高度重视关键信息基础设施的数据安全,存储安全已成为审核重点 二、存储安全是数据安全的关键一环,应…...
Docker+Consul+Registrator 实现服务注册与发现
第四阶段 时 间:2023年8月8日 参加人:全班人员 内 容: DockerConsulRegistrator 实现服务注册与发现 目录 一、服务注册中心引言 CAP理论是分布式架构中重要理论: 二、服务注册中心软件 (一)Zoo…...
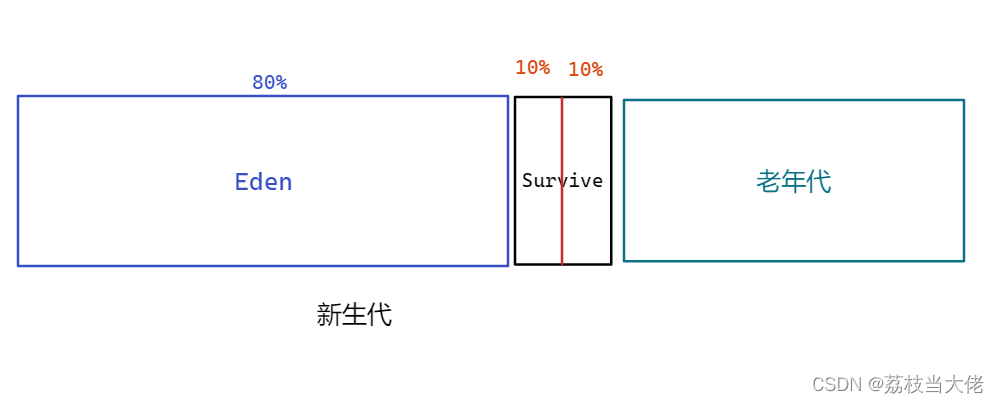
深入学习JVM —— GC垃圾回收机制
前言 前面荔枝已经梳理了有关JVM的体系结构和类加载机制,也详细地介绍了JVM在类加载时的双亲委派模型,而在这篇文章中荔枝将会比较详细地梳理有关JVM学习的另一大重点——GC垃圾回收机制的相关知识,重点了解的比如对象可达性的判断、四种回收…...
)
Centos7.6 + Apache Ranger 2.4.0编译(docker方式)
目录 一、Ranger简介 1、组件列表 2、支持的数据引擎服务 二、主机环境准备 1、关闭防火墙 2、关闭SELINUX 3、安装docker 4、下载Ranger源码包 5、下载Maven安装包 三、编译Ranger源码 1、修改官方包中的build_ranger_using_docker.sh 2、运行脚本编译 3、编译检…...

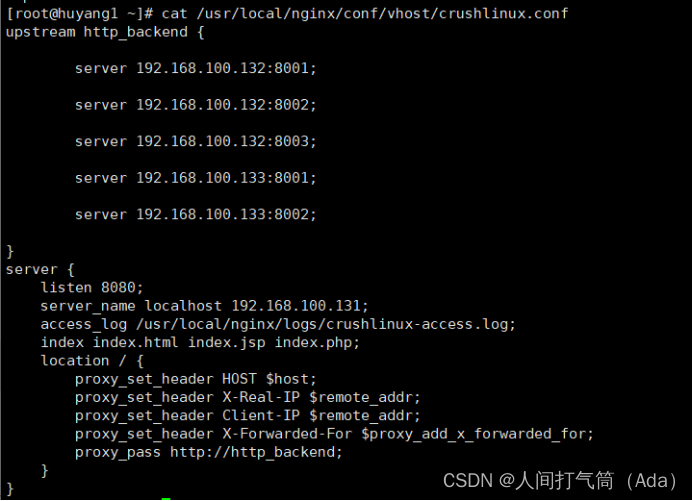
LVS-DR模式集群配置
四台虚拟机 node1:128 node2:135 RS端: node3:130 node4:132 [rootnode2 ~]# yum install -y ipvsadm #配置LVS虚拟IP,没有ifconfig命令则先安装 [rootnode2 ~]# yum install net-tools -y #配置VIP [root…...
)
【数据分析】pandas( 二)
目录 简介: 一,1.1来自Series字典或字典 1.2 来自ndarray或者列表的字典: 1.3来自结构化或记录数组; 1.4来自字典列表: 1.4来自元组的字典: 1.5 来自Series 二,代替构造函数: 2.1DataFram…...
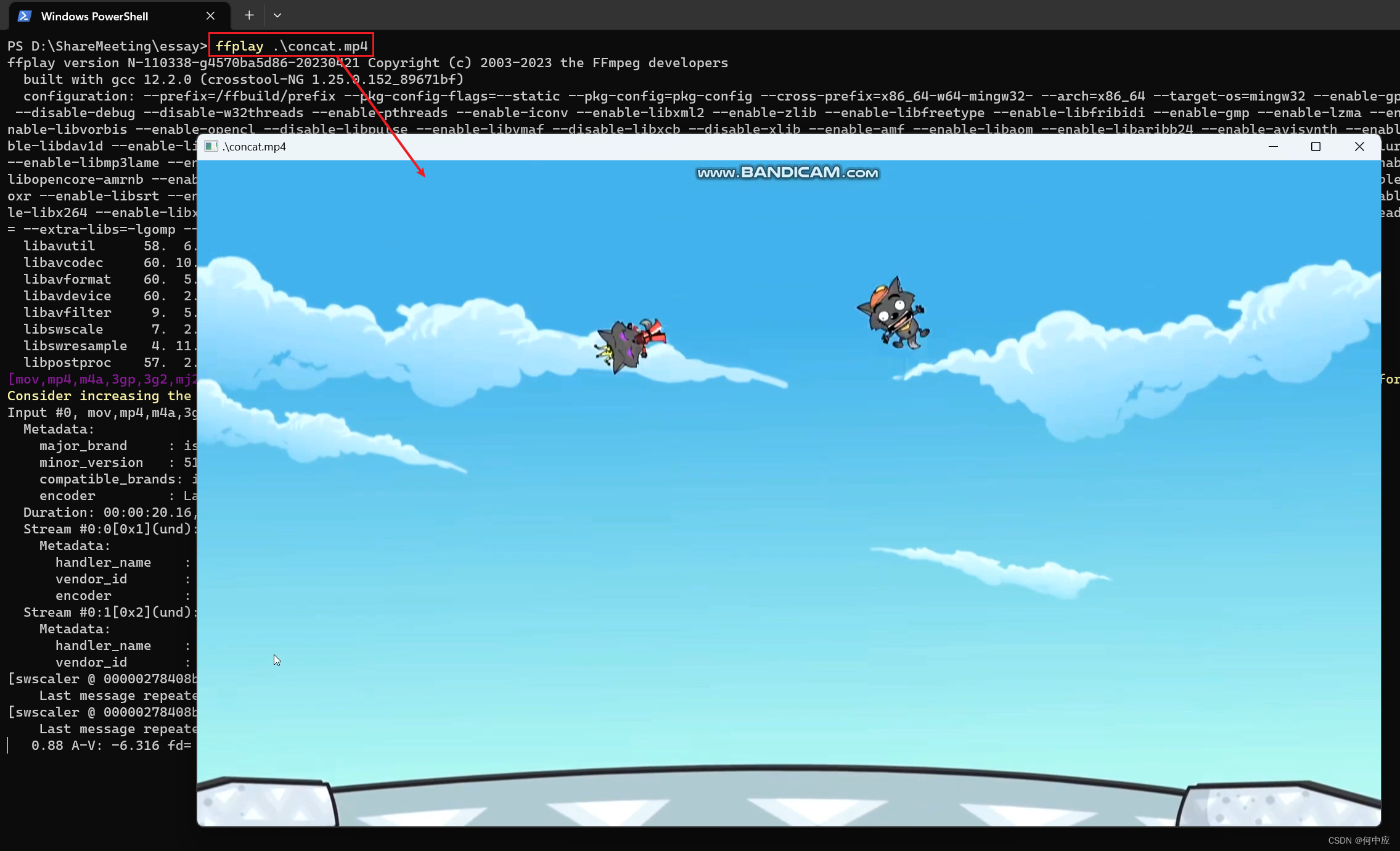
ffmpeg工具实用命令
说明:ffmpeg是一款非常好用的媒体操作工具,包含了许多对于视频、音频的操作,有些视频播放器里面实际上就是使用了ffmpeg。本文介绍ffmpeg的使用以及一些较为实用的命令。 安装 ffmpeg是命令行操作的,不需要安装,可在…...

zabbix API笔记
博客园原文 python简单demo 输出id为111主机的主机群组信息 import requests import json request_headers {"Content-Type": "application/json"} zabbix_url "http://xxx.xxx.xxx.xxx:8080/zabbix/api_jsonrpc.php" get_hostgroup_from_h…...

[HDLBits] Mt2015 q4a
Module A is supposed to implement the function z (x^y) & x. Implement this module. module top_module (input x, input y, output z);assign z(x^y)&x; endmodule...
HarmonyOS NEXT,生命之树初长成
在不同的神话体系中,都有着关于生命之树的记载。 比如在北欧神话中,一株巨大的树木联结着九大世界,其被称为“尤克特拉希尔”Yggdrasill。在中国的《山海经》中,也有着“建木”的传说,它“有九欘,下有九枸&…...
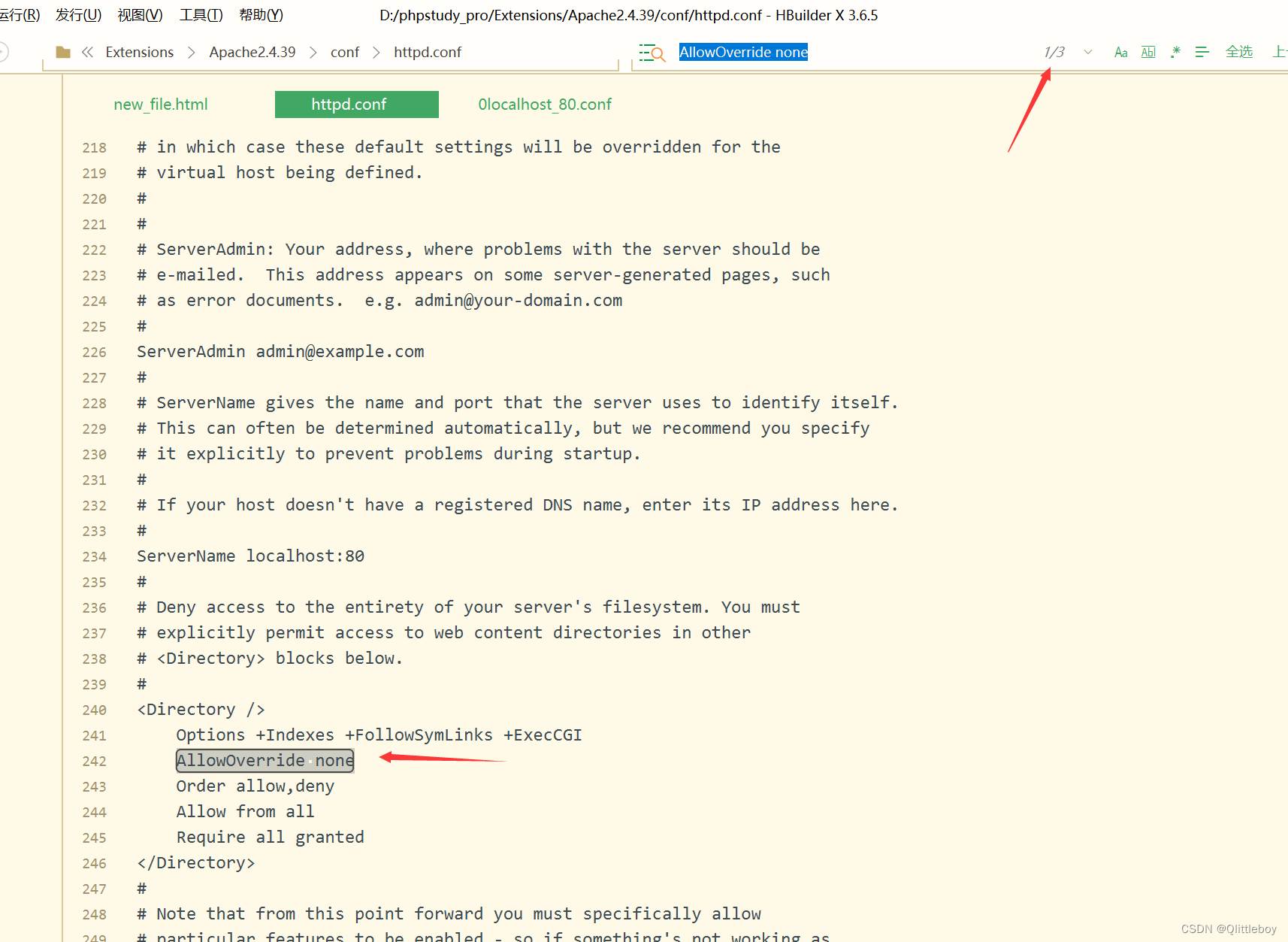
PHPstudy配置伪静态步骤,tp5.1的框架
搜索mod_rewrite.so,然后去掉前面的#(即放开注释) 2.找到index.php 同级文件.htaccess(没有就新建) 这些是tp5.1自带的内容,把它注释掉,是错误的内容,添加下面的这段配置 #<If…...
LeetCode:Hot100的python版本
94. 二叉树的中序遍历...
rv1126更新rknpu驱动教学
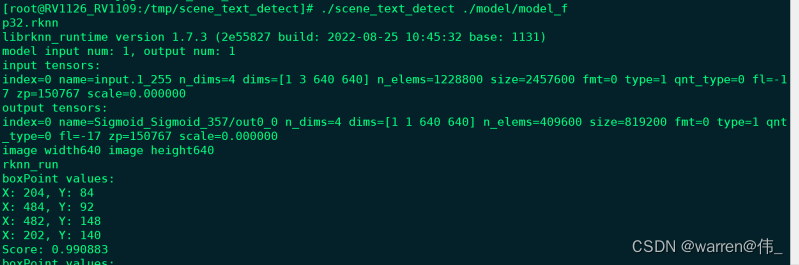
测试平台:易佰纳rv1126 38板 查看板端版本-------------------------------------------------- 1:查看npu驱动版本 dmesg | grep -i galcore,可以看到版本为6.4.3.5 2:查看rknn-server版本 strings /usr/bin/rknn_server | g…...
[机器学习]线性回归模型
线性回归 线性回归:根据数据,确定两种或两种以上变量间相互依赖的定量关系 函数表达式: y f ( x 1 , x 2 . . . x n ) y f(x_1,x_2...x_n) yf(x1,x2...xn) 回归根据变量数分为一元回归[ y f ( x ) yf(x) yf(x)]和多元回归[ y …...

Vue基于php医院预约挂号系统_6nrhh
随着信息时代的来临,过去的管理方式缺点逐渐暴露,对过去的医院预约挂号管理方式的缺点进行分析,采取计算机方式构建医院预约挂号系统。本文通过阅读相关文献,研究国内外相关技术,开发并设计一款医院预约挂号系统的构建…...

2023-08-07力扣今日六题-不错题
链接: 剑指 Offer 04. 二维数组中的查找 题意: 一个二维矩阵数组,在行上非递减,列上也非递减 解: 虽然在行列上非递减,但是整体并不有序,第一行存在大于第二行的数字,第一列存在…...

Elasticsearch搜索出现NAN异常
原因分析 Elasticsearch默认的打分,一般是不会出现异常的之所以会出现NAN异常,往往是因为我们重新计算了打分,使用了function_score核心原因是在function_score中,出现了计算异常,比如 0/0,比如log1p(x),x为负数等 真…...

(杭电多校)2023“钉耙编程”中国大学生算法设计超级联赛(6)
1001 Count 当k在区间(1n)/2的左边时,如图,[1,k]和[n-k1,n]完全相同,所以就m^(n-k) 当k在区间(1n)/2的右边时,如图,[1,n-k1]和[k,n]完全相同,所以也是m^(n-k) 别忘了特判,当k等于n时,n-k为0,然后a1a1,a2a2,..anan,所以没什么限制,那么就是m^n AC代码: #includ…...

Sora提示词工程:从静态描述到动态世界导演的AI视频创作指南
1. 项目概述:当“提示词”成为Sora的“方向盘”最近在AI视频生成圈子里,一个叫SoraEase/sora-prompt的项目开始被频繁提及。乍一看,这只是一个GitHub上的开源仓库,里面可能收集了一些用于OpenAI Sora模型的提示词(Prom…...

TypeScript函数式编程实战:fp-ts生产级应用技巧与模式解析
1. 项目概述:从类型体操到生产级函数式编程如果你在TypeScript社区里混迹过一段时间,大概率听说过或者用过fp-ts这个库。它把Haskell风格的函数式编程范式带到了TypeScript世界,提供了Option、Either、Task、Reader等一系列强大的代数数据类型…...

马上开课!因果推断与机器学习训练营,10天带你写出能“下结论”的论文!
为什么有些人服药后康复,而另一些人却毫无改善?为什么大学学位能改变收入水平?这些如果……会怎样的问题,其实都属于因果推断的范畴。在医疗研究中,许多问题都涉及因果概念,因此因果推断在健康研究领域越来…...

三步实现本地化视频硬字幕提取:免费AI工具轻松生成SRT字幕文件
三步实现本地化视频硬字幕提取:免费AI工具轻松生成SRT字幕文件 【免费下载链接】video-subtitle-extractor 视频硬字幕提取,生成srt文件。无需申请第三方API,本地实现文本识别。基于深度学习的视频字幕提取框架,包含字幕区域检测、…...

[IdeaLoop · 灵感回路] 独立开发者创业/副业灵感日报 · 2026-05-14
灵感日报 2026年05月14日 从今日全网热点提炼,精选 5 个值得关注的商业方向。— 灵感回路 IdeaLoop 完整报告(含竞品分析、MVP 规划、冷启动策略):idealoop.top 🏆 #1 胶片一键调色助手 综合评分:65 / 10…...
广东省人民医院刘再毅amp;南方医科大学南方医院梁莉等团队:基于可解释深度学习模型预测胶质瘤分子改变)
Lancet Digit Health(IF=24.1)广东省人民医院刘再毅amp;南方医科大学南方医院梁莉等团队:基于可解释深度学习模型预测胶质瘤分子改变
01文献学习今天分享的文献是由广东省人民医院放射科刘再毅、南方医科大学南方医院梁莉等团队于2026年5月11日在柳叶刀旗下数字健康领域顶刊《The Lancet Digital Health》(中科院1区top,IF24.1)上发表的研究“Molecular alterations predicti…...

ARMv8/v9架构ID_AA64ISAR3_EL1寄存器详解与应用
1. AArch64指令集属性寄存器ID_AA64ISAR3_EL1概述 在ARMv8/v9架构中,ID_AA64ISAR3_EL1是一个关键的系统寄存器,它属于AArch64指令集属性寄存器家族。这个64位寄存器专门用于描述处理器在AArch64执行状态下实现的各种指令集扩展特性。作为ARM架构的标准实…...

【Sora 2正式版深度解析】:20年AI架构师亲测的5大颠覆性功能与企业落地避坑指南
更多请点击: https://intelliparadigm.com 第一章:Sora 2正式版发布背景与核心定位 OpenAI 于2024年第三季度正式发布 Sora 2,标志着文本到视频生成技术从实验性原型迈入工业级应用新阶段。该版本并非简单迭代,而是基于超大规模时…...
)
从布加勒斯特到蒂米什瓦拉:ElevenLabs罗马尼亚语语音在11个地区口音适配中的3大断层(含IPA音标对齐失败案例库)
更多请点击: https://intelliparadigm.com 第一章:ElevenLabs罗马尼亚语语音合成的技术基底与地域语言学前提 ElevenLabs 的罗马尼亚语语音合成并非简单套用通用 TTS 架构,而是深度耦合了东欧罗曼语支的音系特征、正字法规范及社会语言变体。…...

LinkedIn高管AI时代生存指南:别卷了,AI时代拼的是做人
AI浪潮席卷,职场人难免焦虑。LinkedIn (领英) 坐拥超过12亿会员的数据,看清了工作重塑的真实轨迹。LinkedIn首席经济机遇官Aneesh Raman惊人言论:AI时代,做个真正的人,别再模仿机器,没人能打败你。AI重塑工…...