ORB-SLAM2学习笔记7之System主类和多线程
文章目录
- 0 引言
- 1 整体框架
- 1.1 整体流程
- 2 System主类
- 2.1 成员函数
- 2.2 成员变量
- 3 多线程
- 3.1 ORB-SLAM2中的多线程
- 3.2 加锁
0 引言
ORB-SLAM2是一种基于特征的视觉SLAM(Simultaneous Localization and Mapping)系统,它能够从单个、双目或RBGD相机的输入中实时地同时定位相机的位置,并构建环境的三维地图。ORB-SLAM2是在ORB-SLAM的基础上进行改进和扩展的版本。
本文主要对ORB-SLAM2的整体框架,System主类和多线程进行学习和总结,如有理解错误,欢迎指正交流。
1 整体框架
1.1 整体流程
ORB-SLAM2整体框架如下图,主要流程可以概括为以下几个步骤:

-
特征提取和匹配:
ORB-SLAM2首先对输入的图像进行特征提取,通常使用Oriented FAST and Rotated BRIEF (ORB)算法来检测和描述图像中的特征点。然后,它使用特征描述子进行特征匹配,以在连续帧之间建立对应关系。 -
初始化:初始化阶段是在初始帧上建立初始地图并估计相机的初始位姿。
ORB-SLAM2使用基于单目、双目或RGB-D输入的不同方法来进行初始化。在单目或双目情况下,可以使用基于运动的方法或基于平面的方法来估计相机的初始位姿。在RGB-D情况下,可以通过三角测量来估计初始位姿。 -
跟踪:跟踪阶段是
ORB-SLAM2的核心部分,它通过连续图像帧之间的特征匹配和运动估计来实时定位相机。通过追踪特征点的运动,ORB-SLAM2可以估计相机的位姿变化,并通过优化方法来减小累积误差。 -
局部地图更新:
ORB-SLAM2通过局部地图来表示环境的三维结构。在跟踪过程中,它会不断地更新和扩展局部地图,包括添加新的地图点和关键帧。同时,ORB-SLAM2还会执行一些优化步骤,如相机位姿优化、地图点优化等,以提高地图的一致性和准确性。 -
回环检测:回环检测是为了解决定位漂移和累积误差问题的关键步骤。
ORB-SLAM2会在跟踪过程中检测可能的回环,并使用回环检测算法来识别和纠正回环。一旦回环被检测到,ORB-SLAM2会进行全局优化来提高整体的一致性。 -
闭环优化:闭环优化是在回环检测之后执行的步骤,通过全局优化来进一步提高地图的一致性和准确性。
ORB-SLAM2会使用所有的关键帧和地图点进行非线性优化,以减小累积误差并提高整体的位姿和地图质量。 -
地图管理:
ORB-SLAM2会维护一个稠密的局部地图和一个稀疏的全局地图,用于表示环境的三维结构。地图管理模块负责管理和更新地图,包括删除冗余地图点、关键帧的选择和插入、地图点的筛选等。
以上是ORB-SLAM2的主要流程和步骤。通过不断的特征提取、跟踪、地图更新、回环检测和优化,ORB-SLAM2能够实现实时的定位和地图构建,并在大范围和长时间的场景中表现出较好的性能。
也有大佬绘制了更详细的流程图(以mono_tum.cc的运行流程为例,建议下载学习):
👉 https://www.jianguoyun.com/p/Dc1MEhMQ-9KLBxjM3uED

此外,还有大佬已经中文注释了ORB_SLAM2可以参考理解代码:
👉 https://github.com/electech6/ORB_SLAM2_detailed_comments/tree/master
但是在学习以上的核心的主要流程之前,需要先熟悉ORB-SLAM2中的System主类和多线程…
2 System主类
System类是ORB-SLAM2系统的主类,主要代码是头文件ORB_SLAM2/include/System.h和源文件ORB_SLAM2/src/System.cc,分析其主要的成员函数和成员变量。
2.1 成员函数
vscode打开System.cc文件,如下,可以看到成员函数的大纲:

具体成员函数的类型和定义如下:
| 成员函数 | 类型 | 定义 |
|---|---|---|
System(const string &strVocFile, string &strSettingsFile, const eSensor sensor, const bool bUseViewer=true) | public | 构造System函数 |
cv::Mat TrackStereo(const cv::Mat &imLeft, const cv::Mat &imRight, const double ×tamp) | public | 跟踪双目相机,返回相机位姿 |
cv::Mat TrackRGBD(const cv::Mat &im, const cv::Mat &depthmap, const double ×tamp) | public | 跟踪RGBD相机,返回相机位姿 |
cv::Mat TrackMonocular(const cv::Mat &im, const double ×tamp) | public | 跟踪单目相机,返回相机位姿 |
void ActivateLocalizationMode() | public | 开启纯定位模式 |
void DeactivateLocalizationMode() | public | 关闭纯定位模式 |
bool System::MapChanged() | public | 检测地图是否有较大变化 |
void System::Reset() | public | 系统复位 |
void System::Shutdown() | public | 系统关闭 |
void System::SaveTrajectoryTUM(const string &filename) | public | 以TUM格式保存相机运动轨迹 |
void System::SaveKeyFrameTrajectoryTUM(const string &filename) | public | 以TUM格式保存关键帧位姿 |
void System::SaveTrajectoryKITTI(const string &filename) | public | 以KITTI格式保存相机运动轨迹 |
int System::GetTrackingState() | public | 获取追踪器状态 |
vector<MapPoint*> System::GetTrackedMapPoints() | public | 获取追踪到的地图点 |
vector<cv::KeyPoint> System::GetTrackedKeyPointsUn() | public | 获取追踪到的关键帧的点 |
2.2 成员变量
主要的成员变量及其定义如下:
| 成员变量 | 类型 | 定义 |
|---|---|---|
eSensor mSensor | private | 传感器类型单目相机MONOCULAR,双目相机STEREO,彩色深度相机RGBD |
ORBVocabulary* mpVocabulary | private | ORB字典,保存ORB描述子聚类结果 |
KeyFrameDatabase* mpKeyFrameDatabase | private | 关键帧数据库,保存ORB描述子倒排索引 |
Map* mpMap | private | 地图 |
Tracking* mpTracker | private | 追踪器 |
LocalMapping* mpLocalMapper | private | 局部建图器 |
std::thread* mptLocalMapping | private | 局部建图线程 |
LoopClosing* mpLoopCloser | private | 回环检测器 |
std::thread* mptLoopClosing | private | 回环检测线程 |
Viewer* mpViewer | private | 查看器 |
FrameDrawer* mpFrameDrawer | private | 帧绘制器 |
MapDrawer* mpMapDrawer | private | 地图绘制器 |
std::thread* mptViewer | private | 查看器线程 |
int mTrackingState | private | 追踪状态 |
std::mutex mMutexState | private | 追踪状态加锁 |
bool mbActivateLocalizationMode | private | 开启纯定位模式 |
bool mbDeactivateLocalizationMode | private | 关闭纯定位模式 |
std::mutex mMutexMode | private | 纯定位模式加锁 |
bool mbReset | private | 系统复位 |
std::mutex mMutexReset | private | 系统复位加锁 |
都说ORB-SLAM2有三大线程Tracking,LocalMapping和LoopClosing线程,可从成员变量中只定义了LocalMapping和LoopClosing线程,其实Tracking线程就是Syetem类的主线程,构成三大线程,虽然Tracking线程在代码实现上是主线程,但三者的关系其实是并发的。
3 多线程
刚刚学习到ORB-SLAM2中主要有三大线程,其实SLAM项目中一般都会使用多线程,由于某个节点可能同时订阅多个消息,或多个线程函数共享数据,为了防止在多个消息被订阅时发生处理时间过长或阻塞,而导致其他回调函数无法正常使用,也为了防止共享数据时在存储或调用时发生错乱,一般都会使用std::mutex(互斥锁)和std::thread(多线程管理)。
3.1 ORB-SLAM2中的多线程
ORB-SLAM2中三大线程中的Tracking线程产生关键帧的频率和时机不是固定的,三个线程同时运行,方便LocalMapping和LoopClosing线程查询Tracking线程是否产生关键帧。
// Tracking线程主函数
void Tracking::Track() {// 进行跟踪// ...// 若跟踪成功,根据条件判定是否产生关键帧if (NeedNewKeyFrame())// 产生关键帧并将关键帧传给LocalMapping线程KeyFrame *pKF = new KeyFrame(mCurrentFrame, mpMap, mpKeyFrameDB);mpLocalMapper->InsertKeyFrame(pKF);
}// LocalMapping线程主函数
void LocalMapping::Run() {// 死循环while (1) {// 判断是否接收到关键帧if (CheckNewKeyFrames()) {// 处理关键帧// ...// 将关键帧传给LoopClosing线程mpLoopCloser->InsertKeyFrame(mpCurrentKeyFrame);}// 线程暂停3毫秒,3毫秒结束后再从while(1)循环首部运行std::this_thread::sleep_for(std::chrono::milliseconds(3));}
}// LoopClosing线程主函数
void LoopClosing::Run() {// 死循环while (1) {// 判断是否接收到关键帧if (CheckNewKeyFrames()) {// 处理关键帧// ...}// 查看是否有外部线程请求复位当前线程ResetIfRequested();// 线程暂停5毫秒,5毫秒结束后再从while(1)循环首部运行std::this_thread::sleep_for(std::chrono::milliseconds(5));}
}3.2 加锁
多线程一般都是和锁一起使用,ORB-SLAM2中多线程和互斥锁一起使用,而互斥锁是有范围的,锁的有效性仅限于大括号{}之内,程序运行出大括号之后就释放锁。另外,一把锁一般在某个时刻只有一个线程能够拿到,比如程序执行到某个需要锁的范围,但是锁正在另一个线程,那当前线程就会先停下来,直到其他线程释放这个锁,当前线程才能继续向下运行。
void KeyFrame::EraseConnection(KeyFrame *pKF) {// 以下大括号中的代码部分加锁{unique_lock<mutex> lock(mMutexConnections);if (mConnectedKeyFrameWeights.count(pKF)) {mConnectedKeyFrameWeights.erase(pKF);bUpdate = true;}}// 程序运行到这里就释放锁,比如下行代码未在加锁范围UpdateBestCovisibles();
}至此,学习了ORB-SLAM2中的System主类的实现细节和ORB-SLAM2中的多线程。后续在此基础上继续学习ORB-SLAM2中的输入预处理部分的核心—特征点的提取、描述子的生成及特征点匹配等等。
Reference:
- https://github.com/raulmur/ORB_SLAM2
⭐️👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍🌔
相关文章:
ORB-SLAM2学习笔记7之System主类和多线程
文章目录 0 引言1 整体框架1.1 整体流程 2 System主类2.1 成员函数2.2 成员变量 3 多线程3.1 ORB-SLAM2中的多线程3.2 加锁 0 引言 ORB-SLAM2是一种基于特征的视觉SLAM(Simultaneous Localization and Mapping)系统,它能够从单个、双目或RBG…...
gin的占位符:和通配符*
1、用法 在 Gin 路由中,可以使用一个通配符(*)或一个占位符(:)来捕获 URL 的一部分。 r.GET("/royal/:id", func(c *gin.Context) {id : c.Param("id")//fmt.Println("into :id")c.Str…...
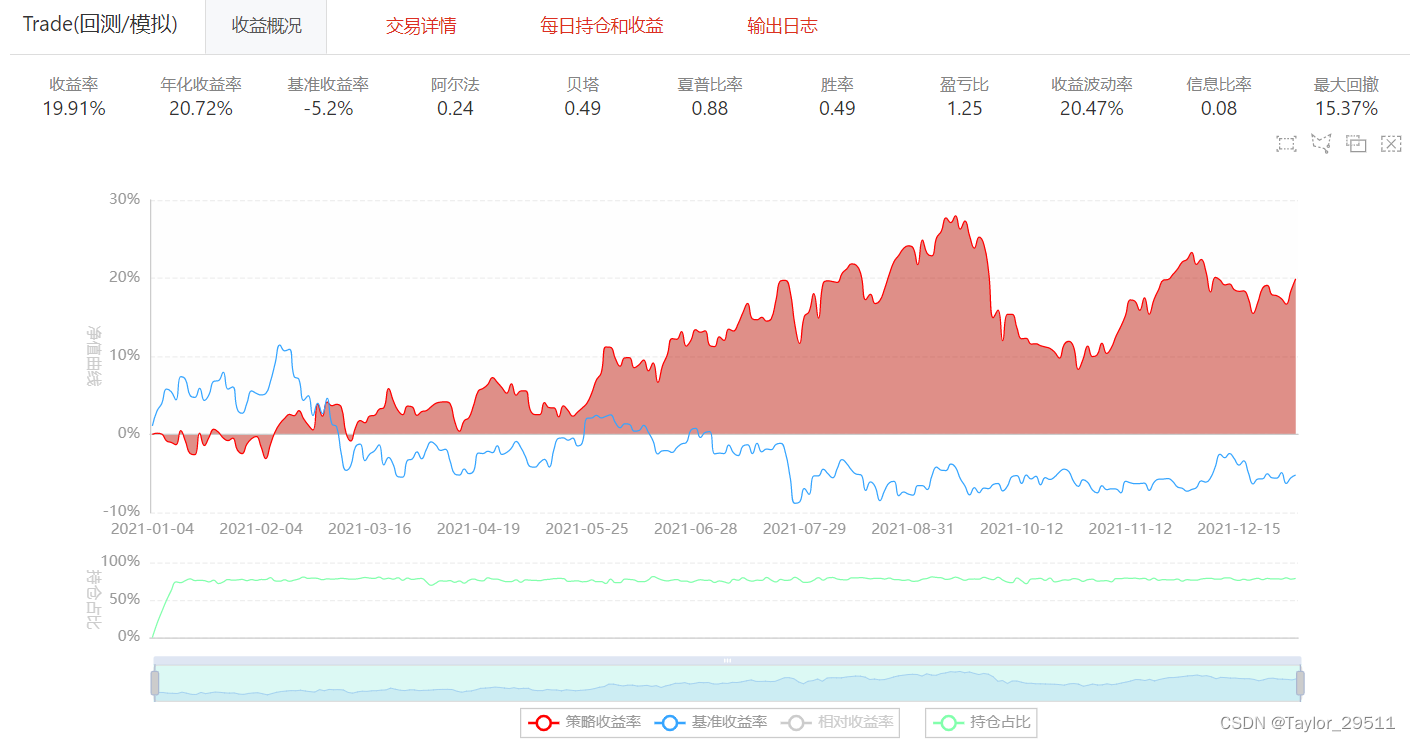
【量化课程】08_2.深度学习量化策略基础实战
文章目录 1. 深度学习简介2. 常用深度学习模型架构2.1 LSTM 介绍2.2 LSTM在股票预测中的应用 3. 模块分类3.1 卷积层3.2 池化层3.3 全连接层3.4 Dropout层 4. 深度学习模型构建5. 策略实现 1. 深度学习简介 深度学习是模拟人脑进行分析学习的神经网络。 2. 常用深度学习模型架…...
12-数据结构-数组、矩阵、广义表
数组、矩阵、广义表 目录 数组、矩阵、广义表 一、数组 二.矩阵 三、广义表 一、数组 这一章节理解基本概念即可。数组要看清其实下标是多少,并且二维数组,存取数据,要先看清楚是按照行存还是按列存,按行则是正常一行一行的去读…...
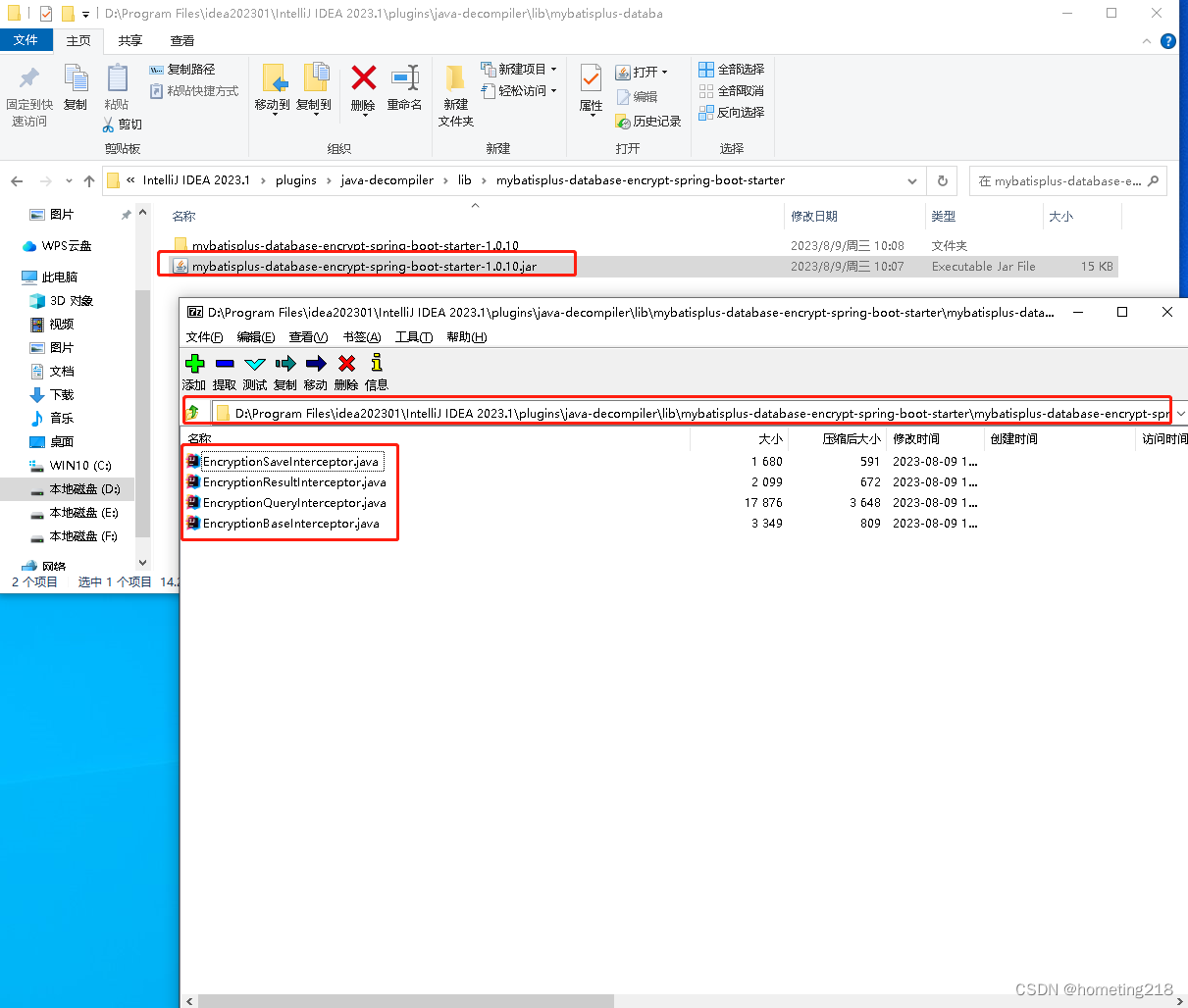
Idea 反编译jar包
实际项目中,有时候会需要更改jar包源码来达到业务需求,本文章将介绍一下如何通过Idea来进行jar反编译 1、Idea安装decompiler插件 2、找到decompiler插件文件夹 decompiler插件文件夹路径为:idea安装路径/plugins/java-decompiler/lib 3、…...
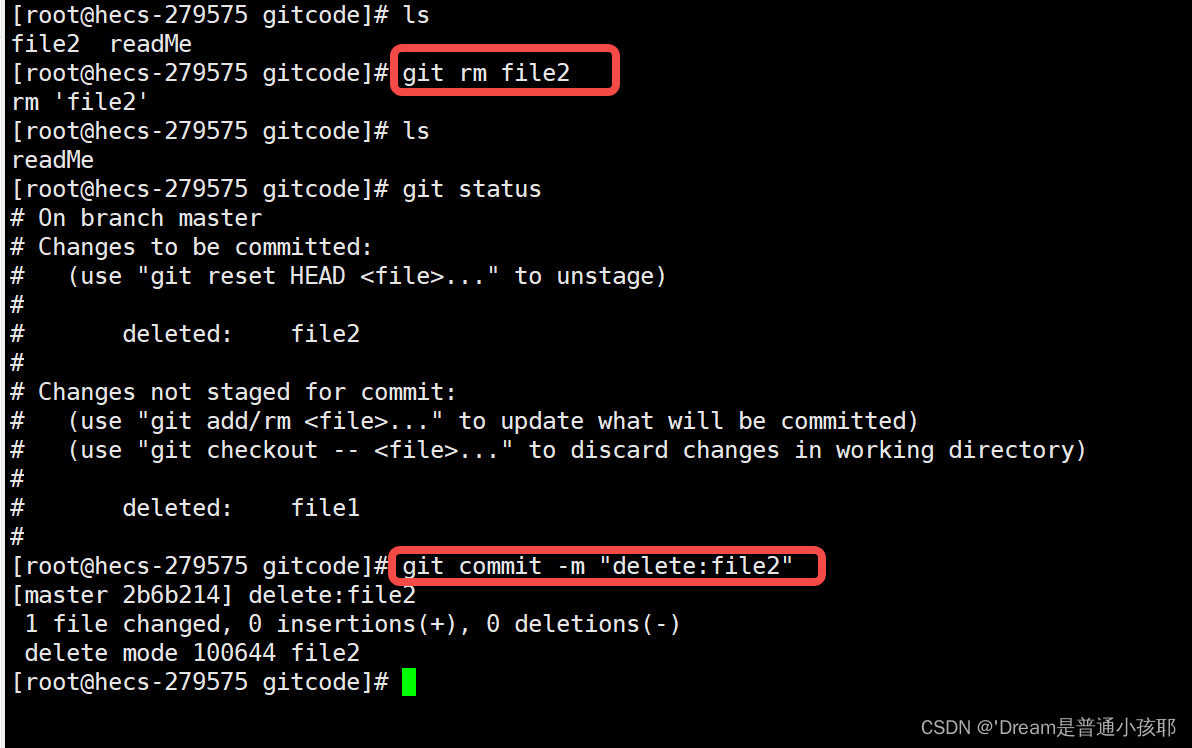
【Git】安装以及基本操作
目录 一、初识Git二、 在Linux底下安装Git一)centOS二)Ubuntu 三、 Git基本操作一) 创建本地仓库二)配置本地仓库三)认识工作区、暂存区、版本库四)添加文件五)查看.git文件六)修改文…...
)
Spring创建Bean的过程(2)
上一节介绍了Spring创建过程中的两个重要的接口,那么它们在创建Bean的过程中起到了什么作用呢?接下来请看: Spring有三种方式寻找 xml 配置文件,根据 xml 文件内容来构建 ApplicationContext,分别为ClassPathXmlAppli…...

Linux 终端操作命令(2)内部命令
Linux 终端操作命令 也称Shell命令,是用户与操作系统内核进行交互的命令解释器,它接收用户输入的命令并将其传递给操作系统进行执行,可分为内部命令和外部命令。内部命令是Shell程序的一部分,而外部命令是独立于Shell的可执行程序…...
【Git】大大大问题之syntax error near unexpected token `(‘ 的错误解决办法
话不多说,先上图: 如图,因为在linux环境里,文件路径中含有括号(),因此报错! 解决办法 等同于 :linux下解决bash: syntax error near unexpected token (’ 的错误&am…...
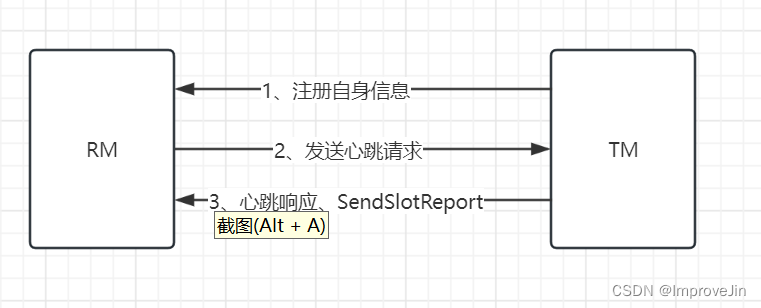
Flink源码之TaskManager启动流程
从启动命令flink-daemon.sh可以看出TaskManger入口类为org.apache.flink.runtime.taskexecutor.TaskManagerRunner TaskManagerRunner::main TaskManagerRunner::runTaskManagerProcessSecurely TaskManagerRunner::runTaskManager //构造TaskManagerRunner并调用start()方法 …...

加入微软MCPP有什么优势?
目录 专业认可 技术支持 销售和市场推广支持 培训和认证 业务机会和合作伙伴网络...

leetcode做题笔记78子集
给你一个整数数组 nums ,数组中的元素 互不相同 。返回该数组所有可能的子集(幂集)。 解集 不能 包含重复的子集。你可以按 任意顺序 返回解集。 思路一:回溯 void backtracking(int* nums, int numsSize, int** res, int* ret…...

Skywalking-9.6.0系列之本地源码编译并启动
Skywalking相信有很多人使用过,通过容器或者下载安装包进行安装的,今天从源代码角度,拉取、构建、启动。 官方文档步骤简洁明了,我这边会结合自己遇到的一些问题做出总结。 当前构建资源版本: MAC 10.15.7IDEA 2021.…...
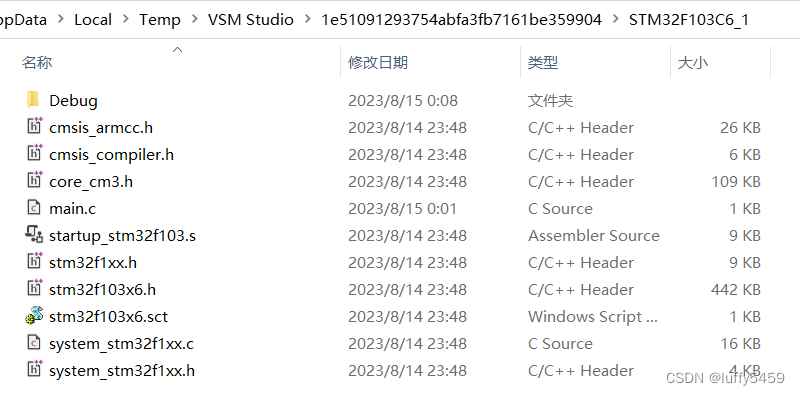
proteus结合keil-arm编译器构建STM32单片机项目进行仿真
proteus是可以直接创建设计图和源码的,但是源码编译它需要借助keil-arm编译器,也就是我们安装keil-mdk之后自带的编译器。 下面给出一个完整的示例,主要是做一个LED灯闪烁的效果。 新建工程指定路径,Schematic,PCB layout都选择默…...

第五十三天
●剪辑——Pr 剪辑(Film editing),即将影片制作中所拍摄的大量素材,经过选择、取舍、分解与组接,最终完成一个连贯流畅、含义明确、主题鲜明并有艺术感染力的作品。 •线性编辑 将素材按时间顺序连接成新的连续画面的技术 •非线性编辑 …...

gorm基本操作
一、gorm安装 1.下载gorm go get -u gorm.io/gorm //gorm框架 go get -u gorm.io/driver/mysql //驱动2.mysql准备工作 mysql> create database godb; mysql> grant all on *.* to admin% identified by golang123!; mysql> flush privileges;3.导入gorm框架 impo…...
)
华为OD机试 - 排队游戏(Java JS Python)
题目描述 新来的老师给班里的同学排一个队。 每个学生有一个影力值。 一些学生是刺头,不会听老师的话,自己选位置,非刺头同学在剩下的位置按照能力值从小到大排。 对于非刺头同学,如果发现他前面有能力值比自己高的同学,他不满程度就增加,增加的数量等于前面能力值比…...

滚动条样式更改
::-webkit-scrollbar 滚动条整体部分,可以设置宽度啥的 ::-webkit-scrollbar-button 滚动条两端的按钮 ::-webkit-scrollbar-track 外层轨道 ::-webkit-scrollbar-track-piece 内层滚动槽 ::-webkit-scrollbar-thumb 滚动的滑块 ::-webkit-scrollbar…...
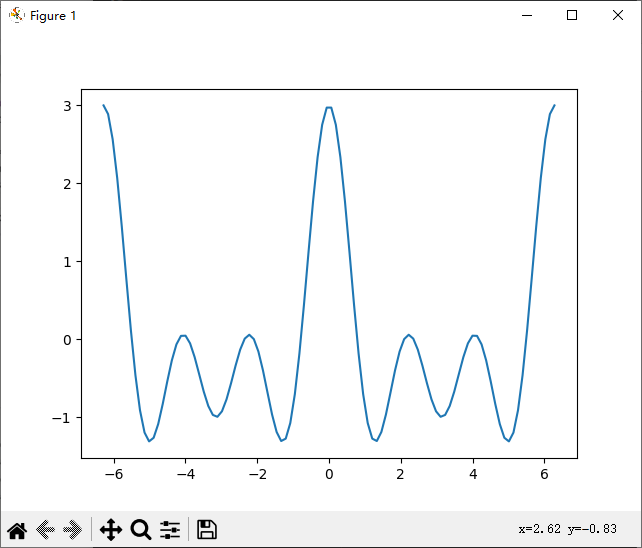
掌握Python的X篇_33_MATLAB的替代组合NumPy+SciPy+Matplotlib
numPy 通常与 SciPy( Scientific Python )和 Matplotlib (绘图库)一起使用,这种组合广泛用于替代 MatLab,是一个强大的科学计算环境,有助于我们通过 Python 学习数据科学或者机器学习。 文章目录 1. numpy1.1 numpy简介1.2 矩阵类型的nparra…...

Python解决-力扣002-两数相加
两数相加:链表表示的逆序整数求和 在这篇技术博客中,我们将讨论一个力扣(LeetCode)上的编程题目:两数相加。这个问题要求我们处理两个非空链表,它们表示两个非负整数。每个链表中的数字都是逆序存储的&…...

多自由度冗余空间机械臂位姿一体化规划与控制【附代码】
✨ 长期致力于空间机械臂、对偶四元数、位姿一体化、路径规划、跟踪控制研究工作,擅长数据搜集与处理、建模仿真、程序编写、仿真设计。 ✅ 专业定制毕设、代码 ✅ 如需沟通交流,点击《获取方式》 (1)基于对偶四元数的冗余机械臂运…...
)
从测速到配置:一套完整的cFosSpeed网络加速保姆级教程(适用于小白)
从零开始掌握cFosSpeed:网络加速全流程实战指南对于经常进行在线游戏、视频会议或大文件传输的用户来说,网络延迟和带宽利用率低下往往是影响体验的关键痛点。cFosSpeed作为一款专业的网络流量优化工具,能够显著改善这些问题,但许…...

Unity安卓构建实战指南:解决APK真机安装闪退与构建失败
1. 这不是一本“从零开始”的书,而是一份你真正上手Unity安卓游戏开发前必须撕开的说明书我带过三届Unity实习工程师,也帮二十多个独立开发者把Demo打包进Google Play。每次看到新人在“安卓构建失败”报错里反复挣扎,或者对着“IL2CPP编译卡…...

告别沉浸式白屏!UniApp中iOS/Android底部安全区与顶部状态栏颜色自定义全攻略
告别沉浸式白屏!UniApp中iOS/Android底部安全区与顶部状态栏颜色自定义全攻略当开发者尝试在UniApp中实现沉浸式设计时,往往会遇到一个令人头疼的问题——默认的白色安全区和状态栏导致界面元素(如电池图标、信号强度)几乎不可见。…...

从‘文件夹’到对象列表:手把手教你用MinIO Java Client实现灵活的文件查询与过滤
从‘文件夹’到对象列表:手把手教你用MinIO Java Client实现灵活的文件查询与过滤在当今数据驱动的时代,对象存储已成为现代应用架构中不可或缺的一部分。MinIO作为高性能、兼容S3协议的开源对象存储解决方案,凭借其轻量级和易用性赢得了众多…...

C语言双端队列完整实现:一行代码吃透头尾操作,算法效率拉满
一、为什么C语言实现双端队列,是数据结构的必学天花板?在C语言数据结构里,队列、栈都是基础中的基础,但真正能把灵活度、效率、内存管理三者揉到一起的,还得是双端队列(deque)。普通队列只能一头…...

Agent开发面试通关攻略:吃透稳拿offer
阅读前置:2026年当下最卷也最缺人的AI岗位,一定是AI Agent开发。最近刷遍CSDN、牛客、力扣最新面经,发现一个非常明显的招聘趋势:普通大模型微调岗位饱和内卷,而AI Agent开发岗位人才严重缺口,薪资更高、竞…...

【紧急预警】92%的DeepSeek测试用例生成失败源于这4个隐性配置缺陷——资深SDET连夜整理修复清单
更多请点击: https://codechina.net 第一章:DeepSeek测试用例生成的现状与危机本质 当前,DeepSeek系列大模型(如DeepSeek-Coder、DeepSeek-VL)在代码生成与理解任务中展现出强大能力,但其测试用例自动生成…...
:这份内部测试SOP已被3家头部科技公司紧急采购)
DeepSeek-R1补全能力封测倒计时(仅剩72小时开放API灰度权限):这份内部测试SOP已被3家头部科技公司紧急采购
更多请点击: https://intelliparadigm.com 第一章:DeepSeek-R1代码补全能力封测全景概览 DeepSeek-R1 是深度求索(DeepSeek)推出的高性能开源推理模型,在代码补全场景中展现出显著的上下文理解力与多语言泛化能力。本…...

解决Claude Code Token不足问题并享受Taotoken活动价
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 解决Claude Code Token不足问题并享受Taotoken活动价 应用场景类,聚焦于使用Claude Code时遇到Token配额紧张的开发者&…...