Verilog同步FIFO设计
同步FIFO(synchronous)的写时钟和读时钟为同一个时钟,FIFO内部所有逻辑都是同步逻辑,常常用于交互数据缓冲。
异步FIFO:数据写入FIFO的时钟和数据读出FIFO的时钟是异步的(asynchronous)
典型同步FIFO有三部分组成:
(1) FIFO写控制逻辑;
(2)FIFO读控制逻辑;
(3)FIFO 存储实体(如Memory、Reg)。
FIFO写控制逻辑主要功能:产生FIFO写地址、写有效信号,同时产生FIFO写 满、写错等状态信号;
FIFO读控制逻辑主要功能:产生FIFO读地址、读有效信号,同时产生FIFO读 空、读错等状态信号。
-
基本概念
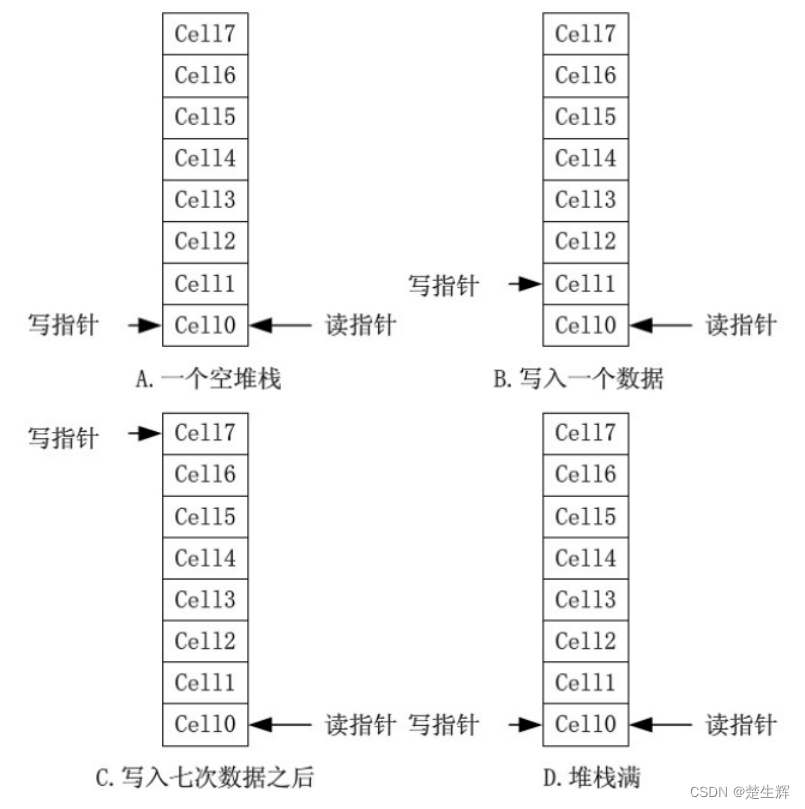
FIFO:先进先出(First-in-first-out) FIFO的深度 同一块数据内存的大小
FIFO的宽度:写指针:
Write-pointer读指针:Read-pointer一般FIFO使用循环指针(计数溢出自动归零)。一般可以称写指针为头head,读指针为尾tail。 初始化时,读写指针指向同一数据地址。下图可见,FIFO初始化时,WP和RP指针指向同一数据单元。WP指向下一个将要写入的数据单元,RP指向将要读出的数据单元
2种方法判断空满:
-
counter计数器:判断有效数据是否等于FIFO的深度,为0就表示空
使用fifo_counter记录FIFO RAM中的数据个数,等于0时,给出empty信号,等于BUF_LENGTH时,给出full信号。
写而未满时增加1 读而未空时减1 同时发生读写操作时,fifo_counter不变
-
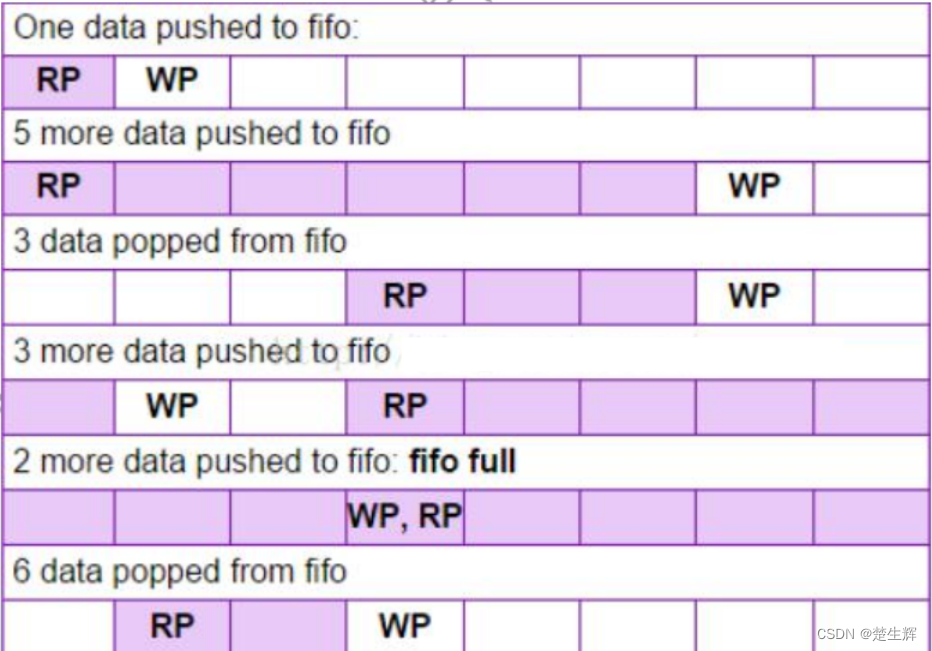
pointer:如果深度为8,那么3bit就可以表示8个数,但是为了判断空满,会多定义一位,也即4bit,WP为1000,RP为0000,我们使用最高位去判断是否在同一单元,用高位判断空满,如果高位相异,就表示满,如果相同表示空。
-
-
程序代码
`define BUF_WIDTH 4 // 地址宽度为3+1, `define BUF_SIZE 8 // 数据个数,FIFO深度 module fifo_counter( clk,rst_n,buf_in,buf_out,wr_en,rd_en,buf_empty,buf_full,fifo_cnt);input clk,rst_n; // 时钟与复位信号input wr_en,rd_en; // 读写使能信号input [7:0] buf_in; // 写数据output reg [7:0] buf_out; // 读数据output wire buf_empty,buf_full; // 空满两个状态信号output reg [`BUF_WIDTH-1:0] fifo_cnt; //判断空满计数器// 读写指针:数据指针3位宽度,0-7索引,8个数据深度,循环指针0-7-0-7reg [`BUF_WIDTH-2:0] rd_ptr,wr_ptr;// 读写容器reg [7:0] buf_mem[0:`BUF_SIZE-1];//判断空满 方式1assign buf_empty = (fifo_cnt == 0); //buf_empty若是reg类型则错,不能使用assign持续赋值assign buf_full = (fifo_cnt == `BUF_SIZE);// fifo_cnt = 8就是满的//判断空满 方式2assign buf_empty = (rd_ptr[3] == wr_ptr[3])&&(rd_ptr[2:0] == wr_ptr[2:0]); assign buf_full = (rd_ptr[3] != wr_ptr[3])&&(rd_ptr[2:0] == wr_ptr[2:0]); // 前后必须同时为1//读数据always @(posedge clk or negedge rst_n) begin if(!rst_n)buf_out <= 0;if(rd_en && !buf_empty)buf_out <= buf_mem[rd_ptr];end// 写数据always @(posedge clk) beginif(wr_en && !buf_full)buf_mem[wr_ptr] <= buf_in;end// 更改读写指针always @(posedge clk or negedge rst_n)beginif(!rst_n)beginwr_ptr <= 0;rd_ptr <= 0;endelse begin// 满足写的条件,就把写指针+1if(!buf_full && wr_en)wr_ptr <= wr_ptr + 1;// 满足读的条件,就把读指针+1if(!buf_empty && rd_en)rd_ptr <= rd_ptr + 1;endend// 监控fifo_cntalways @(posedge clk or negedge rst_n)beginif(!rst_n)fifo_cnt <= 0;else if((!buf_full&&wr_en)&&(!buf_empty&&rd_en)) // 同时读写,数量不变fifo_cnt <= fifo_cnt;else if(!buf_full && wr_en) // 写数据:写而未满增加1fifo_cnt <= fifo_cnt + 1;else if(!buf_empty && rd_en) // 读数据:读而未空减1fifo_cnt <= fifo_cnt-1;elsefifo_cnt <= fifo_cnt; // 维持end endmodule -
TestBench
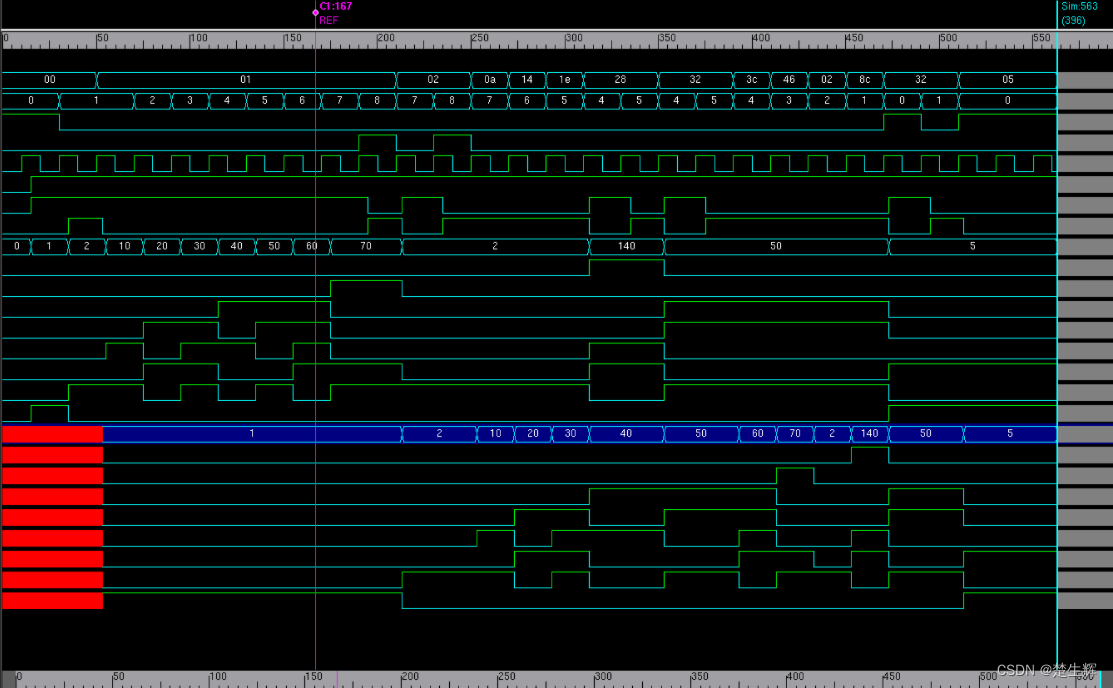
`define BUF_WIDTH 4 //地址宽度为3+1, `define BUF_SIZE (8) //数据个数,FIFO深度 module tb_fifo_counter;reg clk,rst_n;reg wr_en,rd_en;reg [7:0] buf_in; // data input to be pushed to bufferwire [7:0] buf_out; // port to output the data using pop. wire buf_empty,buf_full; // buffer empty and full indicationwire [`BUF_WIDTH-1:0] fifo_cnt; // number of data pushed in to bufferfifo_counter dut(.clk(clk),.rst_n(rst_n),.buf_in(buf_in),.buf_out(buf_out),.wr_en(wr_en),.rd_en(rd_en),.buf_empty(buf_empty),.buf_full(buf_full),.fifo_cnt(fifo_cnt));fifo_counter dut(.clk (clk),.rst_n (rst_n),.buf_in (buf_in),.buf_out (buf_out),.wr_en (wr_en),.rd_en (rd_en),.buf_empty (buf_empty),.buf_full (buf_full),.fifo_cnt (fifo_cnt));always #10 clk = ~clk;// 定义一个临时的数据,将读出来的数据暂存reg [7:0] tempdata;initial beginclk = 0;rst_n = 0;wr_en = 0;rd_en = 0;buf_in = 0;#15; rst_n = 1;push(1);// 同时读写forkpush(2);pop(tempdata); // 读取tempdata = 1joinpush(10);push(20);push(30);push(40);push(50);push(60);push(70);// 70push 就会满push(80);push(90);push(100);push(110);push(120);push(130);pop(tempdata); // 读取tempdata = 2push(tempdata); pop(tempdata);pop(tempdata);pop(tempdata);pop(tempdata);push(140); // 可以写进去pop(tempdata);push(tempdata);pop(tempdata);pop(tempdata);pop(tempdata);pop(tempdata);pop(tempdata);pop(tempdata);pop(tempdata);pop(tempdata);pop(tempdata);pop(tempdata);pop(tempdata);push(5);pop(tempdata);// 读取tempdata = 5#50 $finish;end// 将data写入fifotask push (input [7:0] data);if(buf_full)$display("---Cannot push %d: Buffer Full---",data);else begin$display("Push",,data);buf_in = data;wr_en = 1;@(posedge clk);#5 wr_en = 0;endendtask// 将data读取出来task pop(output[7:0] data);if(buf_empty)$display("---Cannot Pop: Buffer Empty---");else beginrd_en = 1;@(posedge clk);#3 rd_en = 0;data = buf_out;$display("------Poped:",,data);endendtask endmodulefind -name "*.v" > file.listmakefile文件:
all:clean com sim SEED=1 com:vcs -full64 -R -sverilog -debug_all -f file.list -l comp.log +ntb_random_seed=$(SEED) \-cm line+cond+fsm+branch+tgl -cm_name simv -cm_dir ./covdir.vdb sim:./simv -l sim.log rung:./simv -gui -l sim.log cov:dve -full64 -covdir *.vdb & clean:rm -rf ./csrc *.daidir *.log *.vpd *.vdb simv* *.key *race.out*rm -rf AN.DBrm -rf novas*rm -rf DVEfilesrm -rf urgReportVCS Coverage Metrics Release O-2018.09-1_Full64 Copyright (c) 1991-2018 by Synopsys Inc. Push 1 Push 2 ------Poped: 1 Push 10 Push 20 Push 30 Push 40 Push 50 Push 60 Push 70 ---Cannot push 80: Buffer Full--- ---Cannot push 90: Buffer Full--- ---Cannot push 100: Buffer Full--- ---Cannot push 110: Buffer Full--- ---Cannot push 120: Buffer Full--- ---Cannot push 130: Buffer Full--- ------Poped: 2 Push 2 ------Poped: 10 ------Poped: 20 ------Poped: 30 ------Poped: 40 Push 140 ------Poped: 50 Push 50 ------Poped: 60 ------Poped: 70 ------Poped: 2 ------Poped: 140 ------Poped: 50 ---Cannot Pop: Buffer Empty--- ---Cannot Pop: Buffer Empty--- ---Cannot Pop: Buffer Empty--- ---Cannot Pop: Buffer Empty--- ---Cannot Pop: Buffer Empty--- ---Cannot Pop: Buffer Empty--- Push 5 ------Poped: 5查看波形:
make rung
相关文章:
Verilog同步FIFO设计
同步FIFO(synchronous)的写时钟和读时钟为同一个时钟,FIFO内部所有逻辑都是同步逻辑,常常用于交互数据缓冲。 异步FIFO:数据写入FIFO的时钟和数据读出FIFO的时钟是异步的(asynchronous) 典型同步FIFO有三部分组成: (1࿰…...

Php“牵手”lazada商品详情页数据采集方法,lazadaAPI接口申请指南
lazada详情接口 API 是开放平台提供的一种 API 接口,它可以帮助开发者获取商品的详细信息,包括商品的标题、描述、图片等信息。在电商平台的开发中,详情接口API是非常常用的 API,因此本文将详细介绍详情接口 API 的使用。 一、la…...
Sentinel 规则持久化
文章目录 Sentinel 规则持久化一、修改order-service服务1.引入依赖2.配置nacos地址 第二步修改非常麻烦,可以略过,直接使用已经打好包的来使用二、修改sentinel-dashboard源码1. 解压2. 修改nacos依赖3. 添加nacos支持4. 修改nacos地址5. 配置nacos数据…...
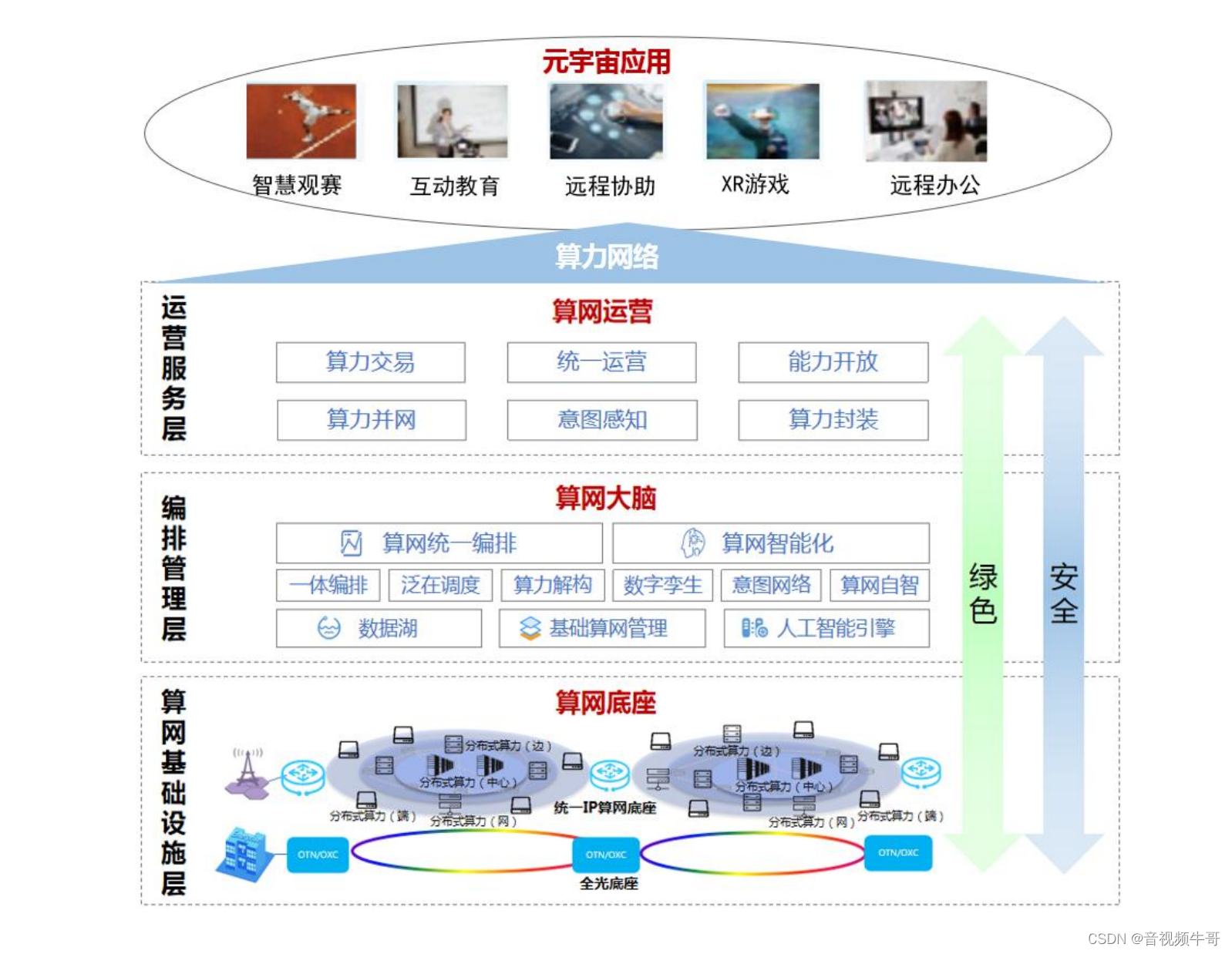
元宇宙时代超高清视音频技术白皮书关于流媒体协议和媒体传输解读
流媒体协议 元宇宙业务场景对流媒体传输的实时性和互动性提出了更高的要求,这就需要在传统的 RTMP、SRT、 HLS 等基础上增加实时互动的支持。实时互动,指在远程条件下沟通、协作,可随时随地接入、实时地传递虚实融合的多维信息,身…...

【计算机设计大赛】国赛一等奖项目分享——基于多端融合的化工安全生产监管可视化系统
文章目录 一、计算机设计大赛国赛一等奖二、项目背景三、项目简介四、系统架构五、系统功能结构六、项目特色(1)多端融合(2)数据可视化(3)计算机视觉(目标检测) 七、系统界面设计&am…...
深入理解【二叉树】
📙作者简介: 清水加冰,目前大二在读,正在学习C/C、Python、操作系统、数据库等。 📘相关专栏:C语言初阶、C语言进阶、C语言刷题训练营、数据结构刷题训练营、有感兴趣的可以看一看。 欢迎点赞 👍…...
RequestRespons
文章目录 Request&Respons1 Request和Response的概述2 Request对象2.1 Request继承体系2.2 Request获取请求数据2.2.1 获取请求行数据2.2.2 获取请求头数据2.2.3 获取请求体数据2.2.4 获取请求参数的通用方式 2.3 IDEA快速创建Servlet2.4 请求参数中文乱码问题2.4.1 POST请…...

UniApp 使用命令创建页面的详细指南
系列文章目录 文章目录 系列文章目录前言一、安装Uni-CLI二、创建页面三、页面创建命令四、页面结构五、页面使用总结 前言 UniApp是一款跨平台的前端框架,可以用于开发同时运行在多个平台(如微信小程序、H5、App等)的应用程序。本文将详细介…...

Opencv 图像的读取与写入
目录 导入cv2 读取图像数据 创建一个窗口 waitKey方法 关闭所有窗口 完整示例 保存图片 示例 导入cv2 # 导入opencv包 import cv2 读取图像数据 cv2.imread(path, flag) 参数说明: path:要读取的图像文件的路径。 flag(可选&#…...

关于rinex3.x广播星历文件中时间系统的说明
文章目录 rinex广播星历文件介绍广播星历介绍rinex3.x多系统广播星历文件中的时间系统写在最后 rinex广播星历文件介绍 rinex星历文件是一种ascii字符文件,可以存放广播星历和精密星历,被广泛用于GNSS数据处理。 本文主要介绍广播星历文件。 对于rinex…...

Ansible 实战
Ansible 实战 1. httpd 角色 目录 rootubuntu1904:~#tree -f httpd/ httpd ├── httpd/default │ └── httpd/default/main.yml ├── httpd/files │ ├── httpd/files/httpd.conf │ └── httpd/files/index.html ├── httpd/handlers │ └── http…...

三、单元测试
三、单元测试 好的单元测试必须遵守 AIR 原则 A:Automatic(自动化)I:Independent(独立性)R:Repeatable(可重复) 单元测试应该是全自动执行的,并且非交互式的…...
“Spring管理JavaBean的过程及Bean的生命周期“
目录 引言1.弹簧容器2. Bean的生命周期2.1 配置javaBean2.2. 解析Bean的定义2.3 检查是否需要添加自己的功能2.4 初始化2.5 实现Aware接口2.6 扩展2.7. 销毁 3. 单例模式和原型模式3.1. 单例模式3.2. 原型模式 4. 总结 引言 Spring框架是一个非常流行的Java应用程序框架&#…...
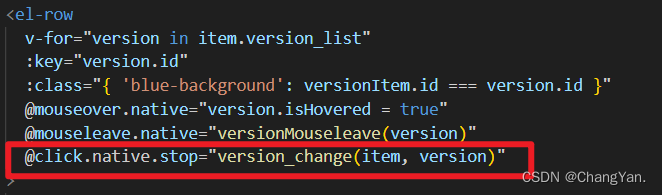
@mouseover不起作用,并没有触发
我的错误代码如下: <el-rowv-for"version in item.version_list":key"version.id":class"{ blue-background: versionItem.id version.id }"mouseover.native"version.isHovered true"mouseleave.native"version…...

Vue 2 组件注册
组件名的命名规则 定义组件名的两种方式: 短横线分隔命名,Kebab Case,例如my-component-name。单词首字母大写命名,Pascal Case,例如MyComponentName。 第一种方式在模板中使用<my-component-name>引用该元素…...

学习游戏开发引擎,打造梦想中的虚拟世界!
游戏开发引擎是游戏开发过程中的关键工具,它们提供了开发者所需的各种功能和资源,加速了游戏的制作过程。以下是一些常用的游戏开发引擎以及它们的优势: Unity(Unity3D): 优势: Unity 是目前最…...

AI搜索引擎助力科学家创新
开发者希望通过帮助科学家从大量文献中发现联系从而解放科学家,让他们专注于发现和创新。 图片来源:The Project Twins 对于专注于历史的研究者Mushtaq Bilal来说,他在未来科技中投入了大量时间。 Bilal在丹麦南部大学( Universit…...

神经网络基础-神经网络补充概念-50-学习率衰减
概念 学习率衰减(Learning Rate Decay)是一种优化算法,在训练深度学习模型时逐渐减小学习率,以便在训练的后期更加稳定地收敛到最优解。学习率衰减可以帮助在训练初期更快地靠近最优解,而在接近最优解时减小学习率可以…...
)
android.system.ErrnoException: open failed: EPERM (Operation not permitted)
android 10(Q)开始增加了沙盒机制,不能直接把文件保存到/sdcard目录下,只能保存到APP专属目录下;AndroidManifest.xml在标签下增加属性【android:requestLegacyExternalStorage“true”】可以暂时保存到/sdcard路径下,但是Android…...
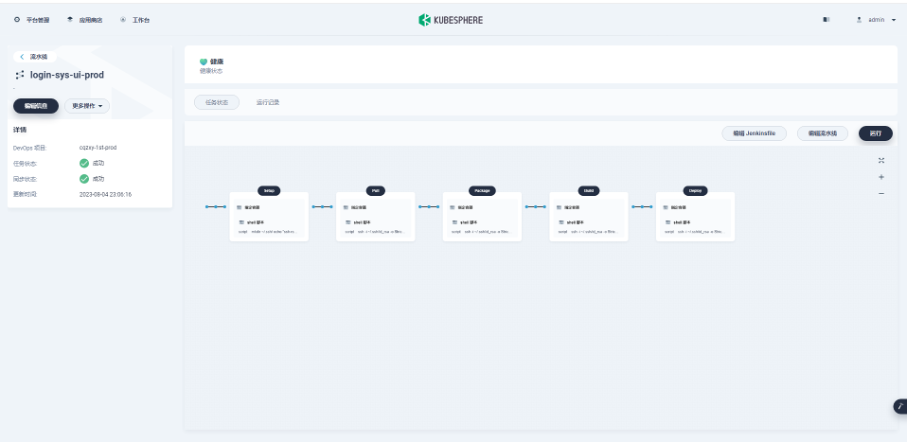
基于 KubeSphere 的应用容器化在智能网联汽车领域的实践
公司简介 某国家级智能网联汽车研究中心成立于 2018 年,是担当产业发展咨询与建议、共性技术研发中心、创新成果转化的国家级创新平台,旨在提高我国在智能网联汽车及相关产业在全球价值链中的地位。 目前着力建设基于大数据与云计算的智能汽车云端运营…...

Cursor Free VIP:解锁AI编程助手完整功能的技术解决方案
Cursor Free VIP:解锁AI编程助手完整功能的技术解决方案 【免费下载链接】cursor-free-vip [Support 0.45](Multi Language 多语言)自动注册 Cursor Ai ,自动重置机器ID , 免费升级使用Pro 功能: Youve reached your t…...

告别卡顿!Flowframes让普通视频秒变丝滑的AI插帧神器
告别卡顿!Flowframes让普通视频秒变丝滑的AI插帧神器 【免费下载链接】flowframes Flowframes Windows GUI for video interpolation using DAIN (NCNN) or RIFE (CUDA/NCNN) 项目地址: https://gitcode.com/gh_mirrors/fl/flowframes 你是否曾为观看动作电影…...

MegSpot视觉对比工具:3个专业级视觉分析难题的终极解决方案
MegSpot视觉对比工具:3个专业级视觉分析难题的终极解决方案 【免费下载链接】MegSpot MegSpot是一款高效、专业、跨平台的图片&视频对比应用 项目地址: https://gitcode.com/gh_mirrors/me/MegSpot 作为一名视觉内容创作者或质量检测人员,你是…...

任务1:验证中间件的4个【钩子】函数任务2:验证CBV,和FBV做比较
建设如下文件目录格式配置根项目 urls.py(django_gate_demo/urls.py)from django.contrib import admin from django.urls import path, includeurlpatterns [path(admin/, admin.site.urls),# 集成演示应用路由path(, include(app_demo.urls)), ]配置d…...

免费LLM API资源全解析:从选型接入到避坑实战指南
1. 项目概述:一个免费LLM API的“藏宝图”如果你最近在捣鼓一些AI小应用,或者想低成本地体验一下大语言模型的能力,大概率会和我一样,被一个问题卡住:去哪里找免费、稳定、还能用的LLM API?市面上各种模型服…...

RobotStudio 仿真软件学习分享05——smart组件创建动态输送链、动态夹具与仿真运行
在工业机器人仿真工作站里,Smart 组件是实现无代码动态逻辑、自动输送、自动夹持、信号交互的核心工具。本次学习我们将从零搭建一套自动上料输送链 智能真空夹具 机器人码垛的完整仿真系统,把 “产品自动生成→输送→到位检测→机器人抓取→搬运码垛→…...

macOS微信防撤回终极指南:3步安装WeChatIntercept插件
macOS微信防撤回终极指南:3步安装WeChatIntercept插件 【免费下载链接】WeChatIntercept 微信防撤回插件,一键安装,仅MAC可用,支持v3.7.0微信 项目地址: https://gitcode.com/gh_mirrors/we/WeChatIntercept 还在为微信消息…...
内核是如何发送事件到用户空间)
RK3568平台开发系列讲解(热拔插篇)内核是如何发送事件到用户空间
🚀返回专栏总目录 文章目录 一、相关接口函数 二、udevadm 命令 三、实验程序 四、运行效果 沉淀、分享、成长,让自己和他人都能有所收获!😄 一、相关接口函数 kobject_uevent 是 Linux 内核中的一个函数, 用于生成和发送 uevent 事件。 它是 udev 和其他设备管理工具与…...
的模板化部署)
统信UOS系统管理员必看:一招搞定用户配置文件(.config/autostart)的模板化部署
统信UOS系统配置模板化实战:从屏保设置到全局用户环境部署 在大型企业或教育机构的桌面环境管理中,统信UOS作为国产操作系统的代表,其标准化部署能力直接影响运维效率。当我们在模板用户中精心配置了各项参数——从屏幕保护时间到电源管理策略…...

LangChain-Rust:用系统级语言重构大语言模型应用框架
1. 项目概述:当LangChain遇上Rust,会擦出怎样的火花?如果你和我一样,既是LangChain生态的深度用户,又对Rust语言的高性能与安全性念念不忘,那么看到“Abraxas-365/langchain-rust”这个项目标题时ÿ…...