学习笔记:Opencv实现图像特征提取算法SIFT
2023.8.19
为了在暑假内实现深度学习的进阶学习,特意学习一下传统算法,分享学习心得,记录学习日常
SIFT的百科:
SIFT = Scale Invariant Feature Transform, 尺度不变特征转换
全网最详细SIFT算法原理实现_ssift算法_Tc.小浩的博客-CSDN博客
在环境配置中要配置opencv:
pip install opencv-contrib-python
SIFT算法的三个计算步骤:
1,在DOG尺度空间中获取特征点;
2,关键点的方向估计(寻找主方向)
3,通过各关键点的特征向量(关键点的描述子生成)
进行两两比较找出相互匹配的若干对特征点,建立两图间景物间的对应关系,可以基于SIFT实现图像拼接
Code of SIFT and lena:
注意你是否有lena.png图像
import cv2 as cvimg = cv.imread('lena.png')
gray = cv.cvtColor(img, cv.COLOR_BGR2GRAY)
sift = cv.xfeatures2d.SIFT_create()
# sift = cv.SIFT_create()
kp = sift.detect(gray, None)
img = cv.drawKeypoints(gray, kp, img)
cv.imshow("SIFT", img)
cv.imwrite('sift_keypoints.jpg', img)
cv.waitKey(0)
cv.destroyAllWindows()Result is shown in these figrues : SIFT 提取了lena的特征点


基于SIFT的图片实现图片拼接:
代码是Copy大神的,注意有两个代码,运行第二个喔。代码所用的图片也附上!
import numpy as np
import cv2class Stitcher:# 拼接函数def stitch(self, images, ratio=0.75, reprojThresh=4.0, showMatches=False):# 获取输入图片(imageB, imageA) = images# 检测A、B图片的SIFT关键特征点,并计算特征描述子(kpsA, featuresA) = self.detectAndDescribe(imageA)(kpsB, featuresB) = self.detectAndDescribe(imageB)# 匹配两张图片的所有特征点,返回匹配结果M = self.matchKeypoints(kpsA, kpsB, featuresA, featuresB, ratio, reprojThresh)# 如果返回结果为空,没有匹配成功的特征点,退出算法if M is None:return None# 否则,提取匹配结果# H是3x3视角变换矩阵(matches, H, status) = M# 将图片A进行视角变换,result是变换后图片result = cv2.warpPerspective(imageA, H, (imageA.shape[1] + imageB.shape[1], imageA.shape[0]))# 将图片B传入result图片最左端result[0:imageB.shape[0], 0:imageB.shape[1]] = imageB# 检测是否需要显示图片匹配if showMatches:# 生成匹配图片vis = self.drawMatches(imageA, imageB, kpsA, kpsB, matches, status)# 返回结果return (result, vis)# 返回匹配结果return resultdef detectAndDescribe(self, image):# 将彩色图片转换成灰度图gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)# 建立SIFT生成器descriptor = cv2.xfeatures2d.SIFT_create()# 检测SIFT特征点,并计算描述子(kps, features) = descriptor.detectAndCompute(image, None)# 将结果转换成NumPy数组kps = np.float32([kp.pt for kp in kps])print(kps)# 返回特征点集,及对应的描述特征return (kps, features)def matchKeypoints(self, kpsA, kpsB, featuresA, featuresB, ratio, reprojThresh):# 建立暴力匹配器matcher = cv2.DescriptorMatcher_create("BruteForce")# 使用KNN检测来自A、B图的SIFT特征匹配对,K=2rawMatches = matcher.knnMatch(featuresA, featuresB, 2)matches = []for m in rawMatches:# 当最近距离跟次近距离的比值小于ratio值时,保留此匹配对if len(m) == 2 and m[0].distance < m[1].distance * ratio:# 存储两个点在featuresA, featuresB中的索引值matches.append((m[0].trainIdx, m[0].queryIdx))# 当筛选后的匹配对大于4时,计算视角变换矩阵if len(matches) > 4:# 获取匹配对的点坐标ptsA = np.float32([kpsA[i] for (_, i) in matches])ptsB = np.float32([kpsB[i] for (i, _) in matches])# 计算视角变换矩阵(H, status) = cv2.findHomography(ptsA, ptsB, cv2.RANSAC, reprojThresh)# 返回结果return (matches, H, status)# 如果匹配对小于4时,返回Nonereturn Nonedef drawMatches(self, imageA, imageB, kpsA, kpsB, matches, status):# 初始化可视化图片,将A、B图左右连接到一起(hA, wA) = imageA.shape[:2](hB, wB) = imageB.shape[:2]vis = np.zeros((max(hA, hB), wA + wB, 3), dtype="uint8")vis[0:hA, 0:wA] = imageAvis[0:hB, wA:] = imageB# 联合遍历,画出匹配对for ((trainIdx, queryIdx), s) in zip(matches, status):# 当点对匹配成功时,画到可视化图上if s == 1:# 画出匹配对ptA = (int(kpsA[queryIdx][0]), int(kpsA[queryIdx][1]))ptB = (int(kpsB[trainIdx][0]) + wA, int(kpsB[trainIdx][1]))cv2.line(vis, ptA, ptB, (0, 255, 0), 1)# 返回可视化结果return vis
from Stitcher import Stitcher
import cv2# 读取拼接图片
imageA = cv2.imread("image/left_01.png")
imageB = cv2.imread("image/right_01.png")# 把图片拼接成全景图
stitcher = Stitcher()
(result, vis) = stitcher.stitch([imageA, imageB], showMatches=True)# 显示所有图片
cv2.imshow("Image A", imageA)
cv2.imshow("Image B", imageB)
cv2.imshow("Keypoint Matches", vis)
cv2.imshow("Result", result)
cv2.waitKey(0)
cv2.destroyAllWindows()

代码使用的图片

效果是这样:


相关文章:
学习笔记:Opencv实现图像特征提取算法SIFT
2023.8.19 为了在暑假内实现深度学习的进阶学习,特意学习一下传统算法,分享学习心得,记录学习日常 SIFT的百科: SIFT Scale Invariant Feature Transform, 尺度不变特征转换 全网最详细SIFT算法原理实现_ssift算法_Tc.小浩的博客…...
使用和原理)
【golang】接口类型(interface)使用和原理
接口类型的类型字面量与结构体类型的看起来有些相似,它们都用花括号包裹一些核心信息。只不过,结构体类型包裹的是它的字段声明,而接口类型包裹的是它的方法定义。 接口类型声明中的这些方法所代表的就是该接口的方法集合。一个接口的方法集…...

【Linux操作系统】Linux系统编程中的共享存储映射(mmap)
在Linux系统编程中,进程之间的通信是一项重要的任务。共享存储映射(mmap)是一种高效的进程通信方式,它允许多个进程共享同一个内存区域,从而实现数据的共享和通信。本文将介绍共享存储映射的概念、原理、使用方法和注意…...

2235.两整数相加:19种语言解法(力扣全解法)
【LetMeFly】2235.两整数相加:19种语言解法(力扣全解法) 力扣题目链接:https://leetcode.cn/problems/add-two-integers/ 给你两个整数 num1 和 num2,返回这两个整数的和。 示例 1: 输入:num…...

中国剩余定理及扩展
目录 中国剩余定理解释 中国剩余定理扩展——求解模数不互质情况下的线性方程组: 代码实现: 互质: 非互质: 中国剩余定理解释 在《孙子算经》中有这样一个问题:“今有物不知其数,三三数之剩二&#x…...

数据在内存中的存储(deeper)
数据在内存中的存储(deeper) 一.数据类型的详细介绍二.整形在内存中的存储三.浮点型在内存中的存储 一.数据类型的详细介绍 类型的意义: 使用这个类型开辟内存空间的大小(大小决定了使用范围)如何看待内存空间的视角…...

算法修炼Day52|● 300.最长递增子序列 ● 674. 最长连续递增序列 ● 718. 最长重复子数组
LeetCode:300.最长递增子序列 300. 最长递增子序列 - 力扣(LeetCode) 1.思路 dp[i]的状态表示以nums[i]为结尾的最长递增子序列的个数。 dp[i]有很多个,选择其中最大的dp[i]Math.max(dp[j]1,dp[i]) 2.代码实现 1class Solution {2 pub…...
使用 HTML、CSS 和 JavaScript 创建实时 Web 编辑器
使用 HTML、CSS 和 JavaScript 创建实时 Web 编辑器 在本文中,我们将创建一个实时网页编辑器。这是一个 Web 应用程序,允许我们在网页上编写 HTML、CSS 和 JavaScript 代码并实时查看结果。这是学习 Web 开发和测试代码片段的绝佳工具。我们将使用ifram…...

百望云联合华为发布票财税链一体化数智解决方案 赋能企业数字化升级
随着数据跃升为数字经济关键生产要素,数据安全成为整个数字化建设的重中之重。为更好地帮助企业发展,中央及全国和地方政府相继出台了多部与数据相关的政策法规,鼓励各领域服务商提供具有自主创新的软件产品与服务,帮助企业在合规…...
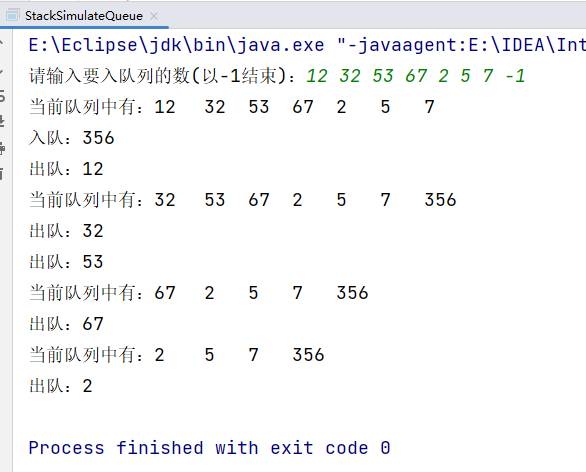
实现两个栈模拟队列
实现两个栈模拟队列 思路:可以想象一下左手和右手,两个栈:stack1(数据所在的栈) ,stack2(临时存放)。 入队:需要将入队 num 加在 stack1 的栈顶即可; 出队&am…...

无涯教程-TensorFlow - 单词嵌入
Word embedding是从离散对象(如单词)映射到向量和实数的概念,可将离散的输入对象有效地转换为有用的向量。 Word embedding的输入如下所示: blue: (0.01359, 0.00075997, 0.24608, ..., -0.2524, 1.0048, 0.06259) blues: (0.01396, 0.11887, -0.48963, ..., 0.03…...
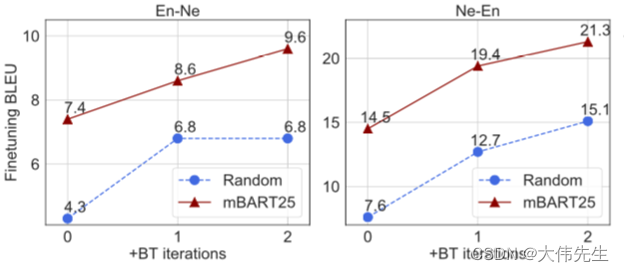
Facebook AI mBART:巴别塔的硅解
2018年,谷歌发布了BERT(来自transformers的双向编码器表示),这是一种预训练的语言模型,在一系列自然语言处理(NLP)任务中对SOTA结果进行评分,并彻底改变了研究领域。类似的基于变压器…...
BDA初级分析——SQL清洗和整理数据
一、数据处理 数据处理之类型转换 字符格式与数值格式存储的数据,同样是进行大小排序, 会有什么区别? 以rev为例,看看字符格式与数值格式存储时,排序会有什么区别? 用cast as转换为字符后进行排序 SEL…...

汽车后视镜反射率测定仪
后视镜是驾驶员坐在驾驶室座位上直接获取汽车后方、侧方和下方等外部信息的工具。它起着“第三只眼睛”的作用。后视镜按安装位置划分通常分为车外后视镜、监视镜和内后视镜。外后视镜观察汽车后侧方监视镜观察汽车前下方内后视镜观察汽车后方及车内情况。用途不一样镜面结构也…...

Redis学习笔记
redis相关内容 默认端口6379 默认16个数据库,初始默认使用0号库 使用select 切换数据库 统一密码管理,所有库密码相同 dbsize:查看当前库key的数量 flushdb:清空当前库 flushall:清空全部库 redis是单线程 多路…...

韩顺平Linux 四十四--
四十四、rwx权限 权限的基本介绍 输入指令 ls -l 显示的内容如下 -rwxrw-r-- 1 root 1213 Feb 2 09:39 abc0-9位说明 第0位确定文件类型(d , - , l , c , b) l 是链接,相当于 windows 的快捷方式- 代表是文件是普通文件d 是目录,相…...

【支付宝小程序】分包优化教程
🦖我是Sam9029,一个前端 Sam9029的CSDN博客主页:Sam9029的博客_CSDN博客-JS学习,CSS学习,Vue-2领域博主 🐱🐉🐱🐉恭喜你,若此文你认为写的不错,不要吝啬你的赞扬,求收…...

语言基础2 矩阵和数组
语言基础2 矩阵和数组 矩阵和数组是matlab中信息和数据的基本表示形式 可以创建常用的数组和网格 合并现有的数组 操作数组的形状和内容 以及使用索引访问数组元素 用到的函数列表如下 一 创建 串联和扩展矩阵 矩阵时按行和列排列的数据元素的二维数据元素的二维矩…...

springMVC中过滤器抛出异常,自定义异常捕获
在过滤器中引入org.springframework.web.servlet.HandlerExceptionResolver AutowiredQualifier("handlerExceptionResolver")private HandlerExceptionResolver resolver; // doFilter中处理if (条件1) {if (条件2) {resolver.resolveException(request, response, …...

图像检索技术研究:深度度量与深度散列在相似性学习中的应用比较与实践 - 使用Python与Jupyter环境
引言 在计算机视觉领域,图像检索是一个长期存在并持续受到研究者关注的重要话题。随着大数据时代的到来,如何高效、准确地从海量数据中检索到相似的图像成为一个巨大的挑战。传统的检索方法在大数据环境下表现不佳,而深度学习技术的崛起为图…...
)
UWB定位标签天线怎么选?PATCH、PIFA、DIPOLE三种方案全对比(含NXP/Qorvo模组适配建议)
UWB定位标签天线选型指南:PATCH、PIFA、DIPOLE三大方案深度解析与工程决策 在物联网定位技术领域,超宽带(UWB)凭借其厘米级精度和强抗干扰能力,已成为工业定位、智能仓储和医疗设备追踪的核心解决方案。而天线作为UWB系统的"感官器官&qu…...

MusicGPT:基于大语言模型的AI音乐导师项目架构与实现
1. 项目概述:当AI成为你的私人音乐导师最近在GitHub上看到一个挺有意思的项目,叫gabotechs/MusicGPT。光看名字,你可能会觉得这又是一个用GPT来生成音乐旋律或者歌词的玩具。但实际深入进去,你会发现它的野心和实用性远超想象。它…...

NHSE终极指南:5分钟掌握动物森友会存档编辑器的完整教程
NHSE终极指南:5分钟掌握动物森友会存档编辑器的完整教程 【免费下载链接】NHSE Animal Crossing: New Horizons save editor 项目地址: https://gitcode.com/gh_mirrors/nh/NHSE 还在为《集合啦!动物森友会》中收集稀有物品而烦恼吗?想…...

AI编码工作流:工程化实践框架与团队效能提升
1. 项目概述:从“AI编码工作流”说起最近在GitHub上看到一个挺有意思的项目,叫nicksp/ai-coding-workflow。光看这个名字,可能很多朋友会想,这不就是又一个教你怎么用ChatGPT或者Copilot写代码的教程吗?说实话…...

Open-Meteo:高性能开源天气API架构深度解析与技术实践
Open-Meteo:高性能开源天气API架构深度解析与技术实践 【免费下载链接】open-meteo Free Weather Forecast API for non-commercial use 项目地址: https://gitcode.com/GitHub_Trending/op/open-meteo 技术痛点与解决方案定位 传统天气数据服务面临三大技术…...

Discord审计数据流解决方案:构建高可靠事件中继与自动化处理
1. 项目概述:一个被低估的审计数据流解决方案 如果你在管理一个中等规模以上的Discord社区,或者正在开发一个需要深度集成Discord生态的机器人,那么你一定遇到过这样的痛点:如何可靠、实时地获取服务器内发生的所有关键事件&…...

AI Agent Harness多模型融合管控
AI Agent Harness实战:从0到1搭建企业级多模型融合管控系统 副标题:兼容OpenAI/Claude/Llama3/通义千问,解决多模型调度、能力互补、成本管控、一致性校验核心痛点 摘要/引言 大家好,我是专注大模型应用落地的资深架构师老周,最近半年帮3家不同行业的企业落地了多模型Ag…...

抖音无水印视频下载神器:3分钟快速上手,轻松保存高清无水印视频
抖音无水印视频下载神器:3分钟快速上手,轻松保存高清无水印视频 【免费下载链接】douyin_downloader 抖音短视频无水印下载 win编译版本下载:https://www.lanzous.com/i9za5od 项目地址: https://gitcode.com/gh_mirrors/dou/douyin_downlo…...

Arduino库持续集成实战:Travis CI自动化编译测试指南
1. 项目概述:为什么Arduino库需要持续集成? 如果你和我一样,维护过几个甚至几十个Arduino库,那你一定对下面这个场景深恶痛绝:你修复了一个库里的Bug,或者添加了一个新功能,满怀信心地提交了代…...

AD中域用户密码策略不生效的解决方案
每到一个月,AD就会提示修改密码,改就改吧,但是还提示一些乱七八糟的规则。 我把这些规则都禁用或是设为没有定义了,但还是报“不能和之前的0个密码相同”, 最后, 解决方案: 在域控制器服务器中&…...