铰接式车辆的横向动力学仿真提供车辆模型研究(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
📚2 运行结果
🎉3 参考文献
🌈4 Matlab代码实现

💥1 概述
铰接式车辆是一种具有铰接连接的多体系统,具有特殊的动力学行为。进行铰接式车辆的横向动力学仿真研究可以遵循以下步骤:
1. 定义车辆模型:首先建立铰接式车辆的几何模型,并定义车辆的基本参数,如质量、惯性特性、轮胎参数等。可以使用计算机辅助设计软件(如AutoCAD)或专业的车辆仿真软件(如CarSim、ADAMS等)创建车辆的3D几何模型。
2. 车辆动力学模型:根据车辆几何模型和运动学原理,建立车辆的动力学模型。通常使用多体动力学原理描述车辆的运动,包括刚体运动学和运动学方程。可以使用拉格朗日方程或牛顿-欧拉方程等动力学方法建立车辆的运动学和动力学方程。
3. 轮胎模型:根据车辆使用的轮胎类型,选择合适的轮胎力学模型。常见的轮胎模型包括线性模型、Magic Formula模型等。根据轮胎模型的参数,计算轮胎的侧向力和纵向力。
4. 驱动和操纵控制模型:定义车辆的驱动和操纵控制系统模型,包括驱动力和转向力的输入模型。根据驾驶策略和控制算法,生成对应的引擎扭矩和转向角信号,用于驱动和操纵车辆。
5. 数值求解:设定仿真的时间步长,并使用数值方法(如欧拉法、龙格-库塔法等)对车辆的动力学方程进行求解。在每个时间步长内,使用车辆的输入模型、轮胎模型和操纵控制模型,计算车辆的状态和响应。
6. 仿真结果评估:通过分析仿真结果,得到车辆的横向动力学响应,包括车辆的侧向运动、横向力、滑移角等。评估车辆的稳定性和控制性能,分析车辆参数和控制策略对横向动力学的影响。
7. 结果解释和报告:根据仿真结果,撰写研究报告或技术论文,包括车辆的模型建立、仿真方法、参数分析和结论等。
需要指出的是,进行铰接式车辆的横向动力学仿真需要熟悉车辆动力学原理和相关仿真工具。为了获得精确和可靠的仿真结果,建议使用专业的车辆仿真软件,并根据具体的研究目的和问题,选择合适的车辆模型和控制策略进行仿真研究。
📚2 运行结果






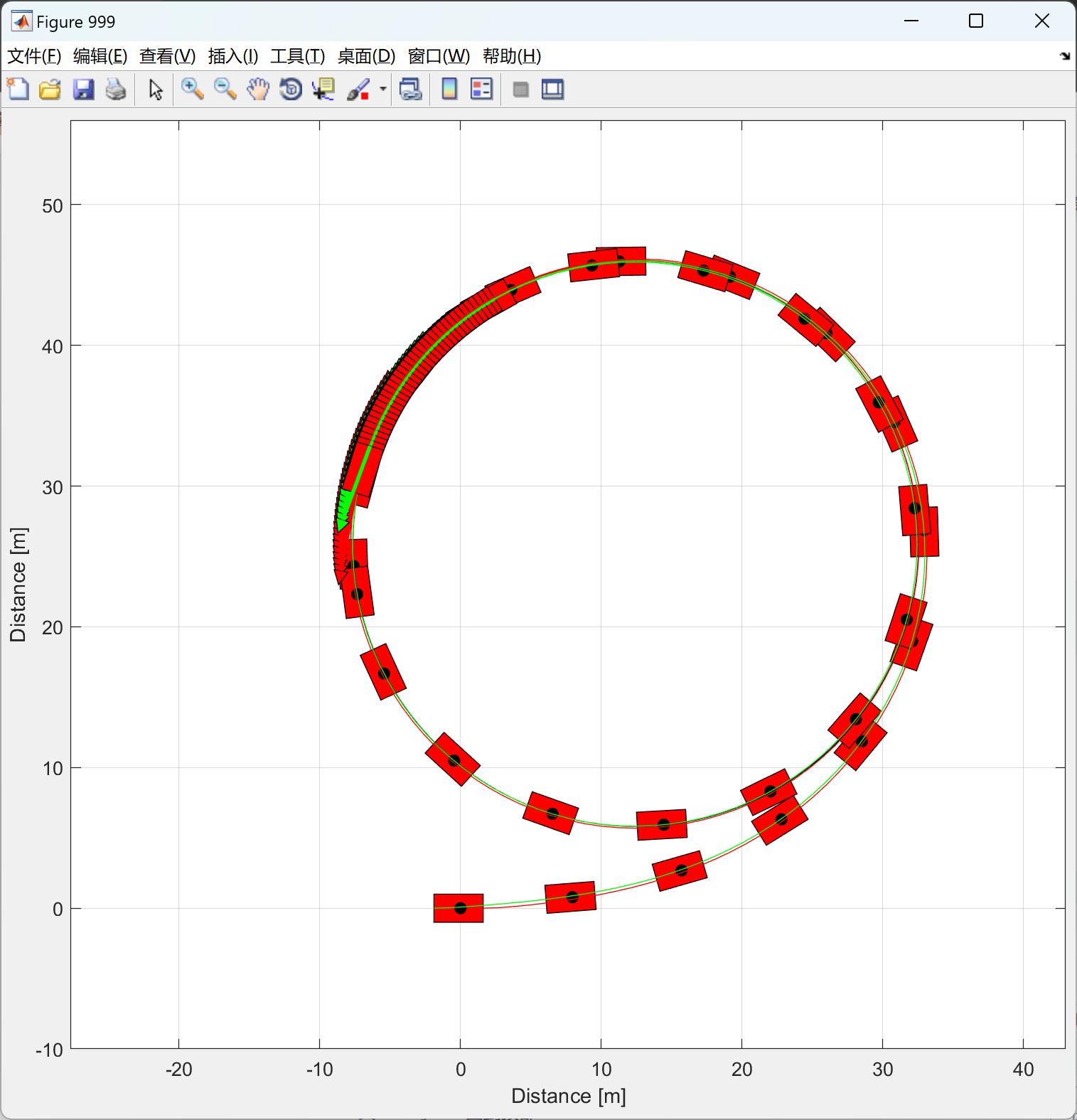










部分代码:
%% Maneuver
% The maneuver to be estimated by the Kalman Filter is defined here.
%
% Choosing simulation parameters:
%
T = 6; % Total simulation time [s]
resol = 50; % Resolution
TSPAN = 0:T/resol:T; % Time span [s]
%%
% Running simulation.
%
simulatorPlant = Simulator(VehiclePlant, TSPAN);
simulatorPlant.dPSI0 = 0.35;
simulatorPlant.Simulate
%%
% Printing simulation parameters.
%
disp(simulatorPlant)
%%
% Retrieving states
%
XTPlant = simulatorPlant.XT;
YTPlant = simulatorPlant.YT;
PSIPlant = simulatorPlant.PSI;
vTPlant = simulatorPlant.VEL;
ALPHATPlant = simulatorPlant.ALPHAT;
dPSIPlant = simulatorPlant.dPSI;
XOUTPlant = [XTPlant YTPlant PSIPlant vTPlant ALPHATPlant dPSIPlant];
%%
% Generating graphics of the vehicle in the considered maneuver (plant)
%
gPlant = Graphics(simulatorPlant);
gPlant.TractorColor = 'r';
gPlant.Frame();
%%
%
close all % Closing figures
%
% Inicializando o pneu
%
TireModel = TireLinear;
disp(TireModel)
%%
% Choosing model vehicle
%
VehicleModel = VehicleSimpleNonlinear; % Same as plant
VehicleModel.tire = TireModel;
disp(VehicleModel)
%%
% Simulador com o mesmo vetor TSPAN e simula玢o
%
simulatorModel = Simulator(VehicleModel, TSPAN);
simulatorModel.dPSI0 = 0.35;
simulatorModel.Simulate;
disp(simulatorModel)
%%
% Retrieving states
%
XTModel = simulatorModel.XT;
YTModel = simulatorModel.YT;
PSIModel = simulatorModel.PSI;
vTModel = simulatorModel.VEL;
ALPHATModel = simulatorModel.ALPHAT;
dPSIModel = simulatorModel.dPSI;
%
gModel = Graphics(simulatorModel);
gModel.TractorColor = 'g';
gModel.Frame();
%%
%
close all % Closing figures
%% Plant and model comparison
% Comparando o modelo de pneu
%
g = 9.81;
FzF = VehiclePlant.mF0*g;
FzR = VehiclePlant.mR0*g;
muy = VehiclePlant.muy;
nF = VehiclePlant.nF;
nR = VehiclePlant.nR;
alpha = 0:0.5:15;
alpha = alpha*pi/180;
FyLin = - TireModel.Characteristic(alpha);
FyFPac = - TirePlant.Characteristic(alpha, FzF, muy);
FyRPac = - TirePlant.Characteristic(alpha, FzR, muy);
figure
ax = gca;
set(ax,'NextPlot','add','Box','on','XGrid','on','YGrid','on')
plot(alpha(1:floor(end/2))*180/pi,FyLin(1:floor(end/2)),'r')
plot(alpha*180/pi,FyFPac,'g')
plot(alpha*180/pi,FyRPac,'g--')
xlabel('alpha [deg]')
ylabel('Fy [N]')
l = legend('Linear','Pacejka F','Pacejka R');
set(l,'Location','SouthEast')
%%
% Comparando os estados
figure
ax = gca;
set(ax,'NextPlot','add','Box','on','XGrid','on','YGrid','on')
plot(TSPAN,XTPlant,'r')
plot(TSPAN,XTModel,'r--')
xlabel('Time [s]')
ylabel('Distance X [m]')
figure
ax = gca;
set(ax,'NextPlot','add','Box','on','XGrid','on','YGrid','on')
plot(TSPAN,YTPlant,'g')
plot(TSPAN,YTModel,'g--')
xlabel('Time [s]')
ylabel('Distance Y [m]')
figure
ax = gca;
set(ax,'NextPlot','add','Box','on','XGrid','on','YGrid','on')
plot(TSPAN,PSIPlant,'b')
plot(TSPAN,PSIModel,'b--')
xlabel('Time [s]')
ylabel('PSI [rad]')
figure
ax = gca;
set(ax,'NextPlot','add','Box','on','XGrid','on','YGrid','on')
plot(TSPAN,vTPlant,'c')
plot(TSPAN,vTModel,'c--')
xlabel('Time [s]')
ylabel('vT [m/s]')
figure
ax = gca;
set(ax,'NextPlot','add','Box','on','XGrid','on','YGrid','on')
plot(TSPAN,ALPHATPlant,'m'),
plot(TSPAN,ALPHATModel,'m--'),
xlabel('Time [s]')
ylabel('ALPHAT [rad/s]')
figure
ax = gca;
set(ax,'NextPlot','add','Box','on','XGrid','on','YGrid','on')
plot(TSPAN,dPSIPlant,'k')
plot(TSPAN,dPSIModel,'k--')
xlabel('Time [s]')
ylabel('dPSI [rad/s]')
%%
% Comparando a acelera玢o longitudinal e transversal
saidasPlant = [XTPlant YTPlant PSIPlant vTPlant ALPHATPlant dPSIPlant];
matDerivEstadosPlant = zeros(size(saidasPlant));
for i = 1:size(saidasPlant,1)
auxil = simulatorPlant.Vehicle.Model(1,saidasPlant(i,:),TSPAN);
matDerivEstadosPlant(i,:) = auxil';
end
dXTPlant = matDerivEstadosPlant(:,1);
dYTPlant = matDerivEstadosPlant(:,2);
dPSIPlant = matDerivEstadosPlant(:,3);
dvTPlant = matDerivEstadosPlant(:,4);
dALPHATPlant = matDerivEstadosPlant(:,5);
ddPSIPlant = matDerivEstadosPlant(:,6);
ddXPlant = dvTPlant.*cos(PSIPlant + ALPHATPlant) - vTPlant.*(dPSIPlant + dALPHATPlant).*sin(PSIPlant + ALPHATPlant);
ddYPlant = dvTPlant.*sin(PSIPlant + ALPHATPlant) + vTPlant.*(dPSIPlant + dALPHATPlant).*cos(PSIPlant + ALPHATPlant);
ACELNumPlant = [(ddXPlant.*cos(PSIPlant) - ddYPlant.*sin(PSIPlant)) (-ddXPlant.*sin(PSIPlant) + ddYPlant.*cos(PSIPlant))];
saidasModel = [XTModel YTModel PSIModel vTModel ALPHATModel dPSIModel];
matDerivEstadosModel = zeros(size(saidasModel));
for i = 1:size(saidasModel,1)
auxil = simulatorModel.Vehicle.Model(1,saidasModel(i,:),TSPAN);
matDerivEstadosModel(i,:) = auxil';
end
dXTModel = matDerivEstadosModel(:,1);
dYTModel = matDerivEstadosModel(:,2);
dPSIModel = matDerivEstadosModel(:,3);
dvTModel = matDerivEstadosModel(:,4);
dALPHATModel = matDerivEstadosModel(:,5);
ddPSIModel = matDerivEstadosModel(:,6);
ddXModel = dvTModel.*cos(PSIModel + ALPHATModel) - vTModel.*(dPSIModel + dALPHATModel).*sin(PSIModel + ALPHATModel);
ddYModel = dvTModel.*sin(PSIModel + ALPHATModel) + vTModel.*(dPSIModel + dALPHATModel).*cos(PSIModel + ALPHATModel);
ACELNumModel = [(ddXModel.*cos(PSIModel) - ddYModel.*sin(PSIModel)) (-ddXModel.*sin(PSIModel) + ddYModel.*cos(PSIModel))];
figure
ax = gca;
set(ax,'NextPlot','add','Box','on','XGrid','on','YGrid','on')
plot(TSPAN,ACELNumPlant(:,1),'r')
plot(TSPAN,ACELNumPlant(:,2),'g')
plot(TSPAN,ACELNumModel(:,1),'r--')
plot(TSPAN,ACELNumModel(:,2),'g--')
xlabel('time [s]')
ylabel('acc. [m/s]')
l = legend('AX Plant','AY Plant','AX Model','AY Model');
set(l,'Location','NorthEast')
%%
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]农思赢.铰接式车辆与俄军北极战役集群[J].坦克装甲车辆,2022(05):56-61.DOI:10.19486/j.cnki.11-1936/tj.2022.05.003.
[2]宋广昊. 铰接式车辆紧急变道避障控制策略研究[D].吉林大学,2021.DOI:10.27162/d.cnki.gjlin.2021.001808.
[3].采用DT-30PM铰接式车辆底盘的俄罗斯“雷神”M2DT防空导弹系统[J].坦克装甲车辆,2017(11):73.
🌈4 Matlab代码实现
相关文章:
铰接式车辆的横向动力学仿真提供车辆模型研究(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭&a…...

Ubuntu20 安装 libreoffice
1 更新apt-get sudo apt-get update2 安装jdk 查看jdk安装情况 Command java not found, but can be installed with:sudo apt install default-jre # version 2:1.11-72, or sudo apt install openjdk-11-jre-headless # version 11.0.138-0ubuntu1~20.04 sud…...

HTTP协议(JavaEE初阶系列15)
目录 前言: 1.HTTP协议 1.1HTTP协议是什么 1.2HTTP协议的报文格式 1.2.1抓包工具的使用 1.2.2HTTP请求 1.2.3HTTP响应 2.HTTP请求 2.1首行的组成 2.2.1URL的组成 2.2认识“方法”(method) 2.2.1GET方法 2.2.2POST方法 2.2.3GET…...
)
机器学习基础10-审查回归算法(基于波士顿房价的数据集)
上一节介绍了如何审查分类算法,并介绍了六种不同的分类算法,还 用同一个数据集按照相同的方式对它们做了审查,本章将用相同的方式对回归算法进行审查。 在本节将学到: 如何审查机器学习的回归算法。如何审查四种线性分类算法。如…...

基于 CentOS 7 构建 LVS-DR 群集。配置nginx负载均衡。
1、基于 CentOS 7 构建 LVS-DR 群集。 [root132 ~]# nmcli c show NAME UUID TYPE DEVICE ens33 c89f4a1a-d61b-4f24-a260-6232c8be18dc ethernet ens33 [root132 ~]# nmcli c m ens33 ipv4.addresses 192.168.231.200/24 [r…...
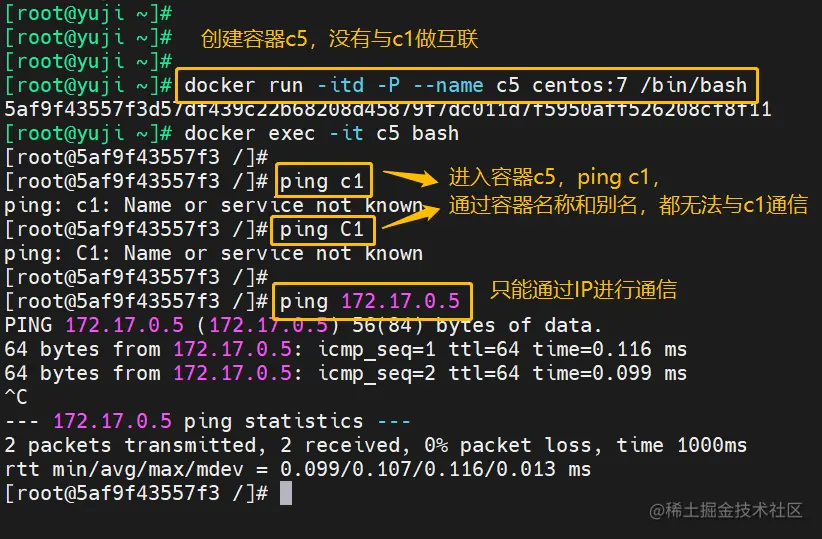
【云原生】Docker的数据管理(数据卷、容器互联)
目录 一、数据卷(容器与宿主机之间数据共享) 二、数据卷容器(容器与容器之间数据共享) 三、 容器互联(使用centos镜像) 总结 用户在使用Docker的过程中,往往需要能查看容器内应用产生的数据…...
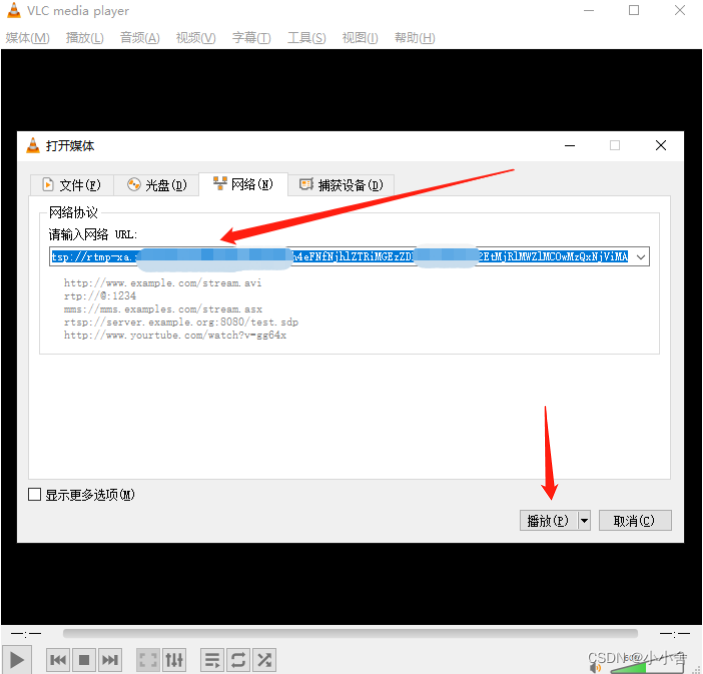
使用vlc在线播放rtsp视频url
1. 2. 3. 工具链接: https://download.csdn.net/download/qq_43560721/88249440...
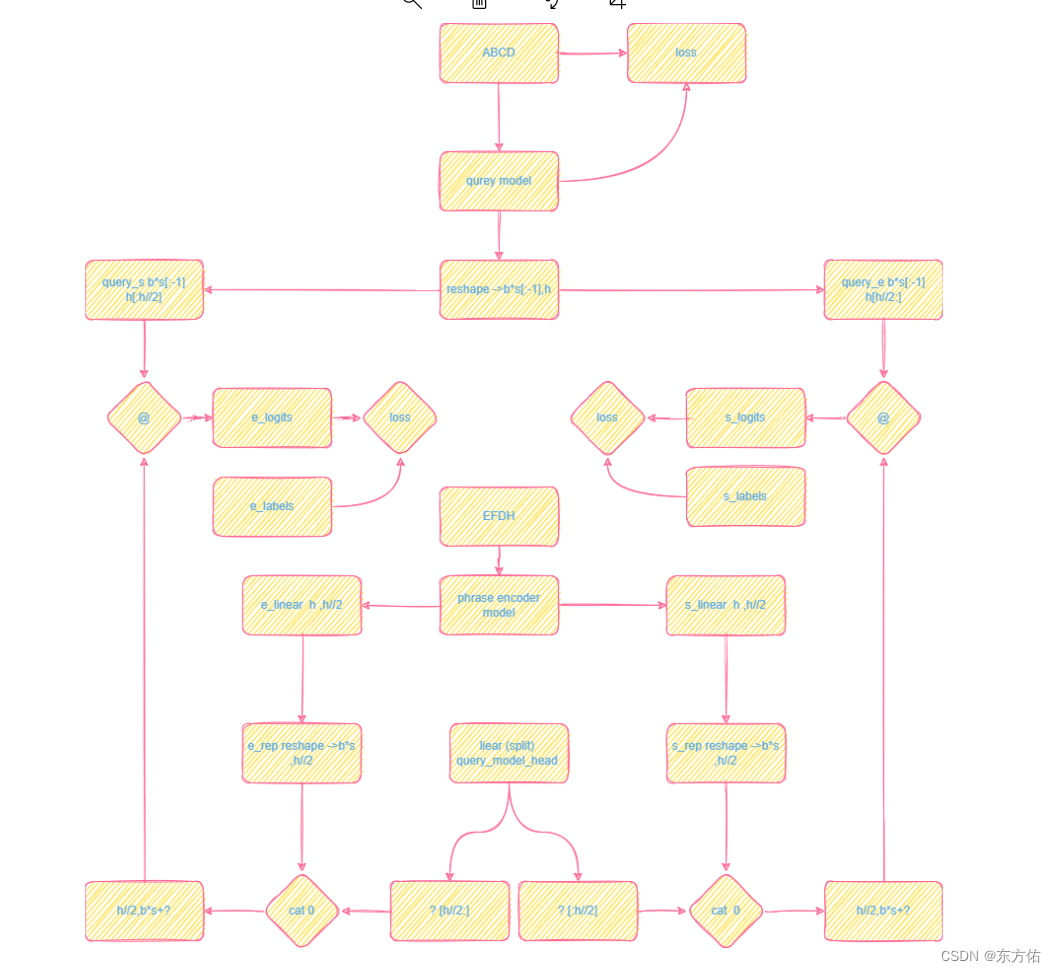
copy is all you need前向绘图 和疑惑标记
疑惑的起因 简化前向图 GPT4解释 这段代码实现了一个神经网络模型,包含了BERT、GPT-2和MLP等模块。主要功能是给定一个文本序列和一个查询序列,预测查询序列中的起始和结束位置,使其对应文本序列中的一个短语。具体实现细节如下:…...

【附安装包】Vred2023安装教程
软件下载 软件:Vred版本:2023语言:简体中文大小:2.39G安装环境:Win11/Win10/Win8/Win7硬件要求:CPU2.0GHz 内存4G(或更高)下载通道①百度网盘丨64位下载链接:https://pan.baidu.com…...

ASP.NET Core 中的 Dependency injection
依赖注入(Dependency Injection,简称DI)是为了实现各个类之间的依赖的控制反转(Inversion of Control,简称IoC )。 ASP.NET Core 中的Controller 和 Service 或者其他类都支持依赖注入。 依赖注入术语中&a…...

优化物料编码规则,提升物料管理效率
导 读 ( 文/ 2358 ) 物料是生产过程的必需品。对物料进行身份的唯一标识,可以更好的管理物料库存、库位,更方便的对物料进行追溯。通过编码规则的设计,可以对物料按照不同的属性、类别或特征进行分类,从而更好地进行库存分析、计划…...
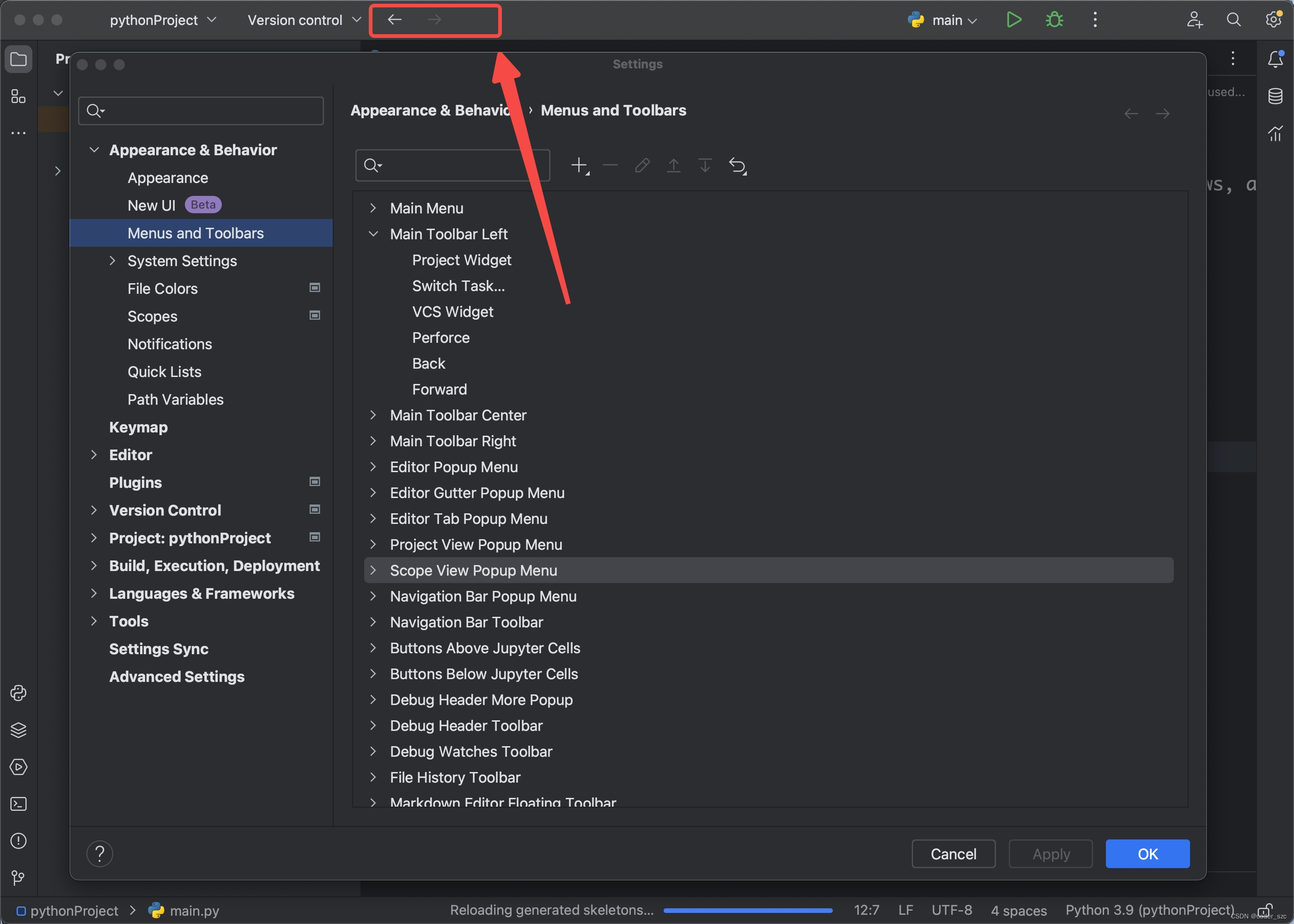
Jetbrains IDE新UI设置前进/后退导航键
背景 2023年6月,Jetbrains在新发布的IDE(Idea、PyCharm等)中开放了新UI选项,我们勾选后重启IDE,便可以使用这一魔性的UI界面了。 但是前进/后退这对常用的导航键却找不到了,以前的设置方式(Vi…...
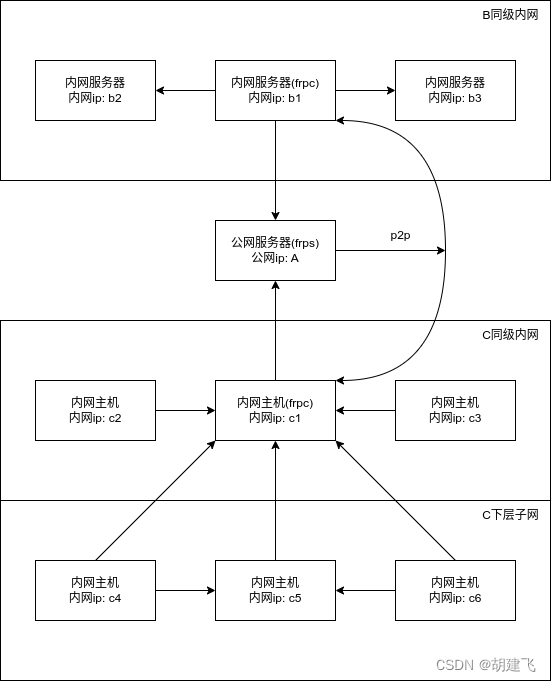
借助frp的xtcp+danted代理打通两边局域网p2p方式访问
最终效果 实现C内网所有设备借助c1内网代理访问B内网所有服务器 配置公网服务端A frps 配置frps.ini [common] # 绑定frp穿透使用的端口 bind_port 7000 # 使用token认证 authentication_method token token xxxx./frps -c frps.ini启动 配置service自启(可选) /etc/…...

2023年高教社杯数学建模思路 - 案例:FPTree-频繁模式树算法
文章目录 算法介绍FP树表示法构建FP树实现代码 建模资料 ## 赛题思路 (赛题出来以后第一时间在CSDN分享) https://blog.csdn.net/dc_sinor?typeblog 算法介绍 FP-Tree算法全称是FrequentPattern Tree算法,就是频繁模式树算法,…...

批量根据excel数据绘制饼状图
要使用Python批量根据Excel数据绘制饼状图,可以使用pandas和matplotlib库来实现。以下是一个基本的代码示例: import pandas as pd import matplotlib.pyplot as plt # 读取Excel文件 data pd.read_excel(data.xlsx) # 提取需要用于绘制饼状图的数据列…...
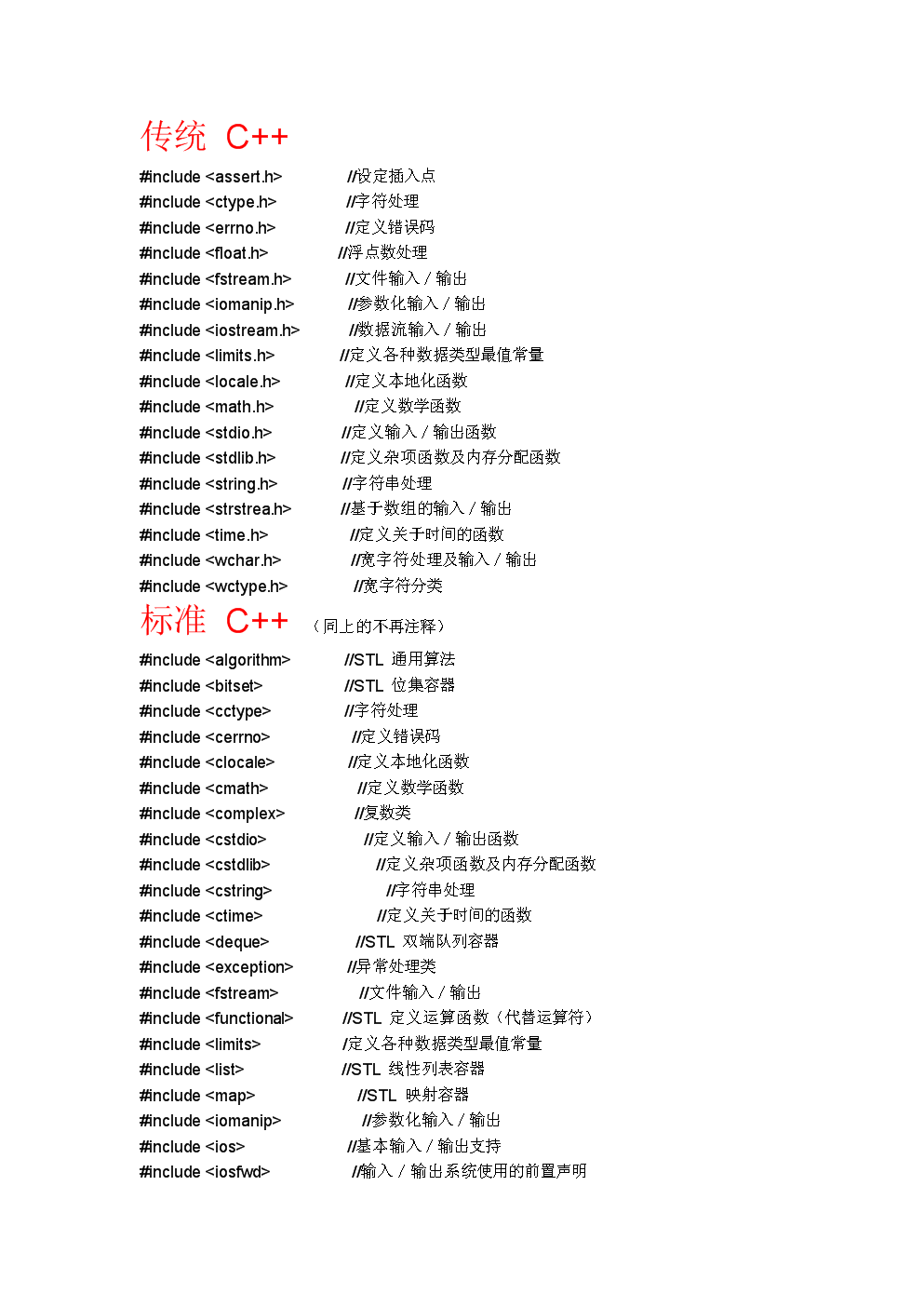
C++头文件和std命名空间
C 是在C语言的基础上开发的,早期的 C 还不完善,不支持命名空间,没有自己的编译器,而是将 C 代码翻译成C代码,再通过C编译器完成编译。 这个时候的 C 仍然在使用C语言的库,stdio.h、stdlib.h、string.h 等头…...

浏览器有哪几种缓存?各种缓存之间的优先级
在浏览器中,有以下几种常见的缓存: 1、强制缓存:通过设置 Cache-Control 和 Expires 等响应头实现,可以让浏览器直接从本地缓存中读取资源而不发起请求。2、协商缓存:通过设置 Last-Modified 和 ETag 等响应头实现&am…...
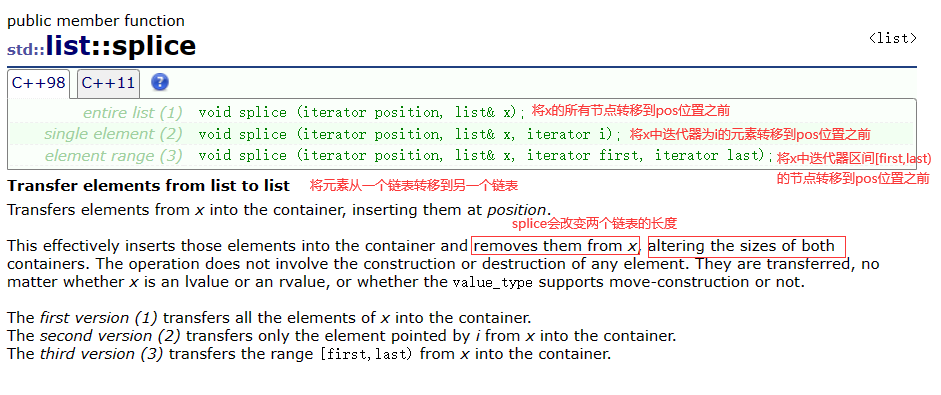
【C++】list
list 1. 简单了解list2. list的常见接口3. 简单实现list4. vector和list比较 1. 简单了解list list的底层是带头双向循环列表。因此list支持任意位置的插入和删除,且效率较高。但其缺陷也很明显,由于各节点在物理空间是不连续的,所以不支持对…...
剪枝基础与实战(2): L1和L2正则化及BatchNormalization讲解
1. CIFAR10 数据集 CIFAR10 是深度学习入门最先接触到的数据集之一,主要用于图像分类任务中,该数据集总共有10个类别。 图片数量:6w 张图片宽高:32x32图片类别:10Trainset: 5w 张,5 个训练块Testset: 1w 张,1 个测试块Pytorch 集成了很多常见数据集的API, 可以通过py…...

C语言学习笔记---指针进阶01
C语言程序设计笔记---016 C语言指针进阶前篇1、字符指针2、指针数组2.1、指针数组例程1 -- 模拟一个二维数组2.2、指针数组例程2 3、数组指针3.1、回顾数组名?3.2、数组指针定义与初始化(格式)3.3、数组指针的作用 --- 常用于二维数组3.4、数…...

如何在macOS上免费解锁QQ音乐加密文件:完整指南
如何在macOS上免费解锁QQ音乐加密文件:完整指南 【免费下载链接】QMCDecode QQ音乐QMC格式转换为普通格式(qmcflac转flac,qmc0,qmc3转mp3, mflac,mflac0等转flac),仅支持macOS,可自动识别到QQ音乐下载目录,默认转换结果…...

Python合并Excel文档
有若干个Excel文档,每个文档格式一致,及第一行为文件标题,第二行为表格表头(表头不完全一致)。现需要将他们合并。合并规则为:去掉每个文档的第一行,以第二行为表头,将每个文档的第三…...

ZMJS,把 JavaScript 解释器放进 SAP ABAP 应用服务器之后,很多扩展思路会变得不一样
我今天看这个 oisee/zmjs 仓库时,最吸引人的不是它把 JavaScript 语法做进了 ABAP,而是它选择了一条非常 SAP 的路线,纯 ABAP、无外部依赖、无 Kernel Module、以类和接口的形式运行在 SAP 应用服务器内部。仓库自己的定位很直接,ZMJS 是一个面向 SAP ABAP 的 Mini JavaScr…...

终极指南:用D2DX让《暗黑破坏神2》在现代电脑上焕发新生
终极指南:用D2DX让《暗黑破坏神2》在现代电脑上焕发新生 【免费下载链接】d2dx D2DX is a complete solution to make Diablo II run well on modern PCs, with high fps and better resolutions. 项目地址: https://gitcode.com/gh_mirrors/d2/d2dx 还在为经…...

DeepSeek模型微调全链路解析:从数据准备、LoRA配置到推理部署的7大关键步骤
更多请点击: https://intelliparadigm.com 第一章:DeepSeek模型微调全链路概览 DeepSeek系列大语言模型(如DeepSeek-V2、DeepSeek-Coder)凭借其开源特性、高性能推理能力与丰富的领域适配性,已成为工业界与学术界微调…...
P2P聊天程序)
基于C#实现(WinForm)P2P聊天程序
♻️ 资源 大小: 29.8MB ➡️ 资源下载:https://download.csdn.net/download/s1t16/87430269 p2p聊天程序 一、功能介绍 1.1 登录 用户凭用户名和密码登录系统,可以更换服务器 IP 和端口,以防网络不畅通,连接服务…...

ZYNQ中断避坑指南:PL端信号线如何正确‘连线’到PS端处理函数?
ZYNQ中断系统深度解析:从硬件信号到软件响应的全链路实践 在嵌入式系统开发中,中断处理是实时响应的核心机制。对于ZYNQ这种集成了ARM处理器(PS)和可编程逻辑(PL)的异构计算平台,其中断系统既有传统处理器的特性,又具备FPGA灵活定…...

UE5 Cesium项目里,如何把默认的飞行Pawn换成建筑漫游Pawn?保姆级迁移教程
UE5 Cesium项目建筑漫游Pawn迁移实战:从飞行模式到精细化浏览的完整指南当你在UE5中结合Cesium插件构建数字孪生场景时,DynamicPawn提供的全球飞行体验令人印象深刻。但当视角聚焦到单体建筑或室内空间时,那种仿佛操控无人机般的操作方式就显…...

Claude Mythos Preview首月揪万余漏洞、拦截150万美元电诈,网络安全格局将变?
玻璃翼计划首战告捷A厂的玻璃翼计划首战告捷,Mythos 30天内就挖出1万个致命漏洞,甚至拦截了150万美元电诈。面对雪片式的报告,人类程序员崩溃求饶:「求别挖了,根本修不完啊!」就在刚刚,Anthropi…...

FModel完整部署指南:UE5资源提取与逆向解析实战
1. 为什么FModel不是“另一个UE资源查看器”,而是虚幻项目逆向分析的起点FModel虚幻引擎资源提取工具完整部署指南——这标题里藏着三个被多数人忽略的关键信号:“FModel”不是泛指,“虚幻引擎”特指UE4/UE5原生资产体系,“完整部…...