《自动驾驶与机器人中的SLAM技术》之GNSS相关基础知识总结
简介
本篇基于对《自动驾驶与机器人中的SLAM技术》中的GNSS定位相关基础知识进行总结用于备忘
知识点整理
-
GNSS(全球卫星导航系统)定位原理
GNSS 通过测量自身与地球周围各卫星的距离来确定自身的位置 , 而与卫星的距离主要是通过测量时间间隔来确定的 -
GNSS与GPS的关系
GPS(全球定位系统)是GNSS的一种,由美国开发。此外还有中国的北斗定位系统BDS,俄罗斯的格洛纳斯系统(GLONASS)、欧盟的伽利略系统(GALILEO) -
实时动态差分技术(RTK)与GNSS的关系
- RTK是矫正卫星信号在传输过程中的定位误差,提高定位精度的一种技术。
- RTK的主要原理:通过地面上的一个已知精确位置的基站与车辆通信,校正车辆卫星接收机的信号
-
差分定位分类
位置差分定位、伪距差分定位、载波相位差分定位(RTK) -
位置差分定位原理
最简单的差分方法。首先安装在基准站的GNSS接收机收到四颗卫星的信息,解算出自身的三维位置,和真实位置相比,得到误差。用户机也接收四颗卫星的信息,解算位置,然后再减去这个误差得到修正后的坐标。
原理就是基站解算出的位置误差和用户机解算出的位置误差相同 -
伪距差分定位原理
基准站计算它和自身可见卫星的距离1(不含误差或误差比较小),距离1和含有误差的测量值2进行比较,并用一个α-β滤波器将此差值滤波得到误差值,用户机在解算的位置后减去这个误差得到自身位置,这样就能消除公共误差。伪距差分最优能够达到亚米级定位精度。 -
载波相位差分定位(RTK)原理
当用户距离基准站比较远时,上述两种差分技术效果下降。
基准站接收到的卫星信号通过无线通信网实时发给用户,用户接收机将接收到的卫星信号和收到基准站信号实时联合解算,求得基准站和流动站间坐标增量 -
通过两个RTK接收器计算车辆的朝向

通过主副天线的位置矢量相减,得到两进而获取车辆角度根天线之间的朝向,(主要为航向角yaw)
一般将车辆后侧或者左侧的天线作为主天线 -
RTK设备的外参
- 基线:两个天线的距离
- 安装偏角:两个天线坐标系旋转
- 安装偏移:两个天线的位置偏移
-
常见的坐标系
- 地理坐标系:也称为经纬度坐标系或经纬高坐标系,地理坐标系是世界坐标系
- UTM坐标系:使用米制坐标,由于地球投影畸变实际UTM坐标和米制坐标之间存在一个0.9996的倍数关系
- 东北天(X-东,Y-北,Z-天空),ENU
- 北东地(X-北,Y-东,Z-地心),NED,这是目前惯导厂商普遍使用的坐标系
- 北东地方位角h到东北天方位角h’之间的转换:h’=-h + pi/2
-
UTM坐标和车辆坐标之间的转换
- UTM坐标的一般形式为:11U 358657mE 5885532mN
- 11表示经度区域
- E表示维度区域
- 358657mE表示东向位置为358657m
- 5885532mN表示北向位置为5885532m
- UTM坐标为 T W G T_{WG} TWG,W表示世界系,G表示GNSS系,需要将UTM坐标变换为车辆坐标 T W B T_{WB} TWB
- 由UTM坐标到车辆坐标中间经过一个外参变换, T G B T_{GB} TGB,则有 T W B = T W G ∗ T G B T_{WB} = T_{WG} * T_{GB} TWB=TWG∗TGB
- UTM坐标的一般形式为:11U 358657mE 5885532mN
相关文章:
《自动驾驶与机器人中的SLAM技术》之GNSS相关基础知识总结
简介 本篇基于对《自动驾驶与机器人中的SLAM技术》中的GNSS定位相关基础知识进行总结用于备忘 知识点整理 GNSS(全球卫星导航系统)定位原理 GNSS 通过测量自身与地球周围各卫星的距离来确定自身的位置 , 而与卫星的距离主要是通过测量时间间隔来确定的 GNSS与GPS的关系 GPS(…...
【前端|CSS系列第4篇】面试官:你了解居中布局吗?
欢迎来到前端CSS系列的第4篇教程!如果你正在寻找一种简单而又强大的前端技术,以使你的网页和应用程序看起来更加专业和美观,那么居中布局绝对是你不能错过的重要知识。 在前端开发中,实现居中布局是一项必备技能,无论…...

安全物理环境技术测评要求项
1.物理选择-保证等级保护对象物理安全的前提和基础 1-0/2-2/3-2/4-2(级别-要求项数量) a)具备防震、防风、防雨能力 b)避免顶层或地下室,否则应加强防水、防潮措施 测评实施重点: 1)机房场地所在…...
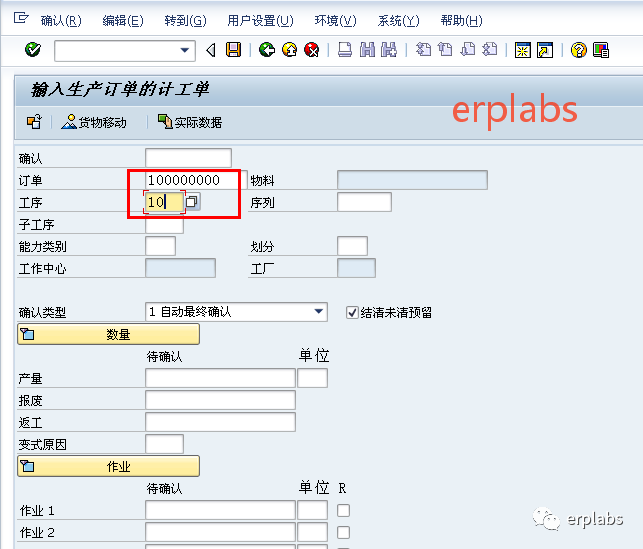
SAP MTS案例教程PP生产前台操作
目录 本章介绍 2 生产订单相关操作 3 批量查询生产订单 3 单个显示生产任务单 5 生产订单批量可用性检查 6 显示短缺部件信息 8 修改生产订单 9 重读工单计划主数据 11 单个下达生产订单 12 批量下达生产订单 13 非倒冲生产方式操作过程 15 多个工单批量发料 15 单个工单发料 1…...

Celery task 执行报错 TypeError: Object of type set is not JSON serializable 问题分析处理
情况描述: 定义了新的shared_task推送到生产环境后,发现无法执行,会报错set对象无法序列化,报错内容如下: Traceback (most recent call last):File "/tmp/venv/lib64/python3.6/site-packages/kombu/serializati…...

【大魔王送书第一期】《一名阿里服务端开发工程师的进阶之路》
一、前言 目前,资讯、社交、游戏、消费、出行等丰富多彩的互联网应用已经渗透到了人们生活和工作的方方面面,正深刻改变着信息时代。随着用户规模的增长和应用复杂度的上升,服务端面临的技术挑战越来越严峻。在头部互联网企业,服…...

[FPGA IP系列] BRAM IP参数配置与使用示例
FPGA开发中使用频率非常高的两个IP就是FIFO和BRAM,上一篇文章中已经详细介绍了Vivado FIFO IP,今天我们来聊一聊BRAM IP。 本文将详细介绍Vivado中BRAM IP的配置方式和使用技巧。 一、BRAM IP核的配置 1、打开BRAM IP核 在Vivado的IP Catalog中找到B…...

react ts
一、项目搭建 1、创建项目 使用vite生成项目 npx create-react-app react-ts-project --template typescript 启动项目 yarn start 删除无用组件 2、设计目录结构 资源说明http网络请求assets公共资源components组件router路由配置utils工具模块store状态机App.tsx应用…...

配置MySQL
配置MySQL_5.7.16 一级目录2.1.1 安装包准备2.1.2 安装MySQL2.1.3 配置MySQL 一级目录 2.1.1 安装包准备 1)将安装包和JDBC驱动上传到/opt/software,共计6个 01_mysql-community-common-5.7.16-1.el7.x86_64.rpm 02_mysql-community-libs-5.7.16-1.el…...
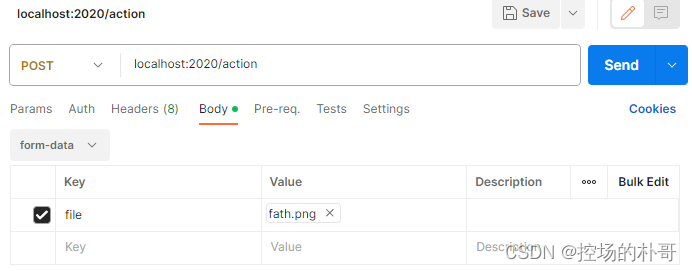
GFPGAN 集成Flask 接口化改造
GFPGAN是一款腾讯开源的人脸高清修复模型,基于github上提供的demo,可以简单的集成Flask以实现功能接口化。 GFPGAN的安装,Flask的安装请参见其他文章。 如若使用POSTMAN进行测试,需使用POST方式,form-data的请求体&am…...

vue数字输入框
目录 1.emitter.JS function broadcast (componentName, eventName, params) {this.$children.forEach(child > {var name child.$options.componentNameif (name componentName) {child.$emit.apply(child, [eventName].concat(params))} else {broadcast.apply(child, …...
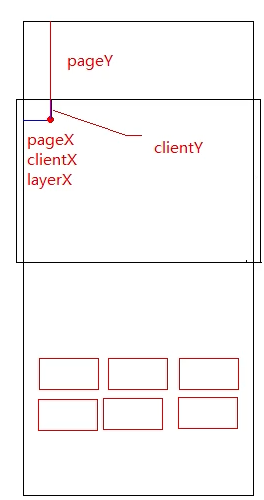
JavaScript—BOM
BOM是什么? Browser Object Model是浏览器对象模型 官方:浏览器对象模型提供了独立于内容的、可以与浏览器窗口进行互动的对象结构,BOM由多个对象构成,其中代表浏览器窗口的window对象是BOM的顶层对象,其他对象都是该…...
 asp.net一个现有的连接被远程主机强行关闭)
C# SocketException(0x2746) asp.net一个现有的连接被远程主机强行关闭
问题原因 如果网页能正常访问,那就是TLS版本支持的问题。 我遇到的问题是: 项目用的是NET Framework 4.6.1,但是 learn.microsoft.com 提到 NET Framework 4.6及更早版本 不支持 TLS 1.1 和 TLS 1.2。 NET Framework 4.6.2 及更高版本 支持 …...

博客系统后端(项目系列2)
目录 前言 : 1.准备工作 1.1创建项目 1.2引入依赖 1.3创建必要的目录 2.数据库设计 2.1博客数据 2.2用户数据 3.封装数据库 3.1封装数据库的连接操作 3.2创建两个表对应的实体类 3.3封装一些必要的增删改查操作 4.前后端交互逻辑的实现 4.1博客列表页 …...
随机化快速排序(Java 实例代码)
随机化快速排序 一、概念及其介绍 快速排序由 C. A. R. Hoare 在 1960 年提出。 随机化快速排序基本思想:通过一趟排序将要排序的数据分割成独立的两部分,其中一部分的所有数据都比另外一部分的所有数据都要小,然后再按此方法对这两部分数…...
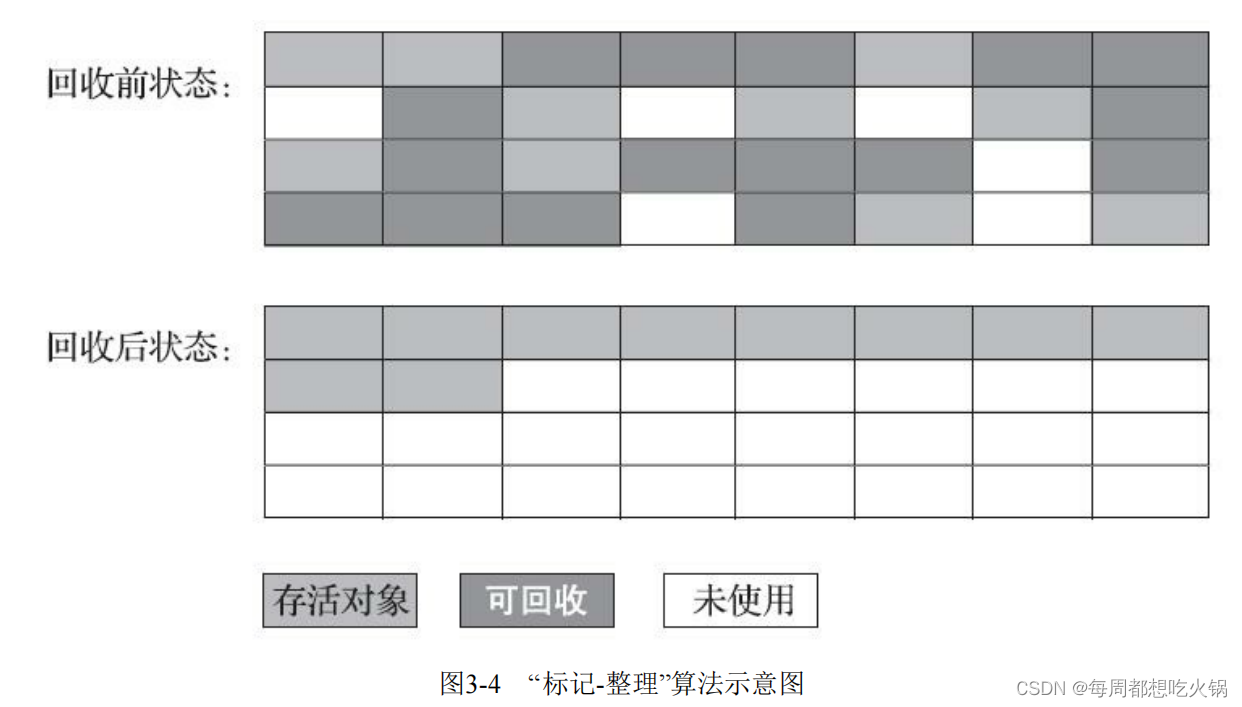
JVM 垃圾收集
垃圾收集 分代理论Java 堆的内存分区不同分代收集垃圾收集算法 分代理论 弱分代假说:绝大多数对象都是朝生夕灭,即绝大多数对象都是用完很快需要销毁的。强分代假说:熬过多次垃圾收集过程的对象就越难以消亡,即如果对象经过多次垃…...

kubesphere中部署grafana实现dashboard以PDF方式导出
1,部署grafana-image-renderer 2,部署grafana GF_RENDERING_SERVER_URL http://ip:30323/render #grafana-image-renderer地址 GF_RENDERING_CALLBACK_URL http://ip:32403/ #grafana地址 GF_LOG_FILTERS rend…...
【环境配置】Android-Studio-OpenCV-JNI以及常见错误 ( 持续更新 )
最近一个项目要编译深度学习的库,需要用到 opencv 和 JNI,本文档用于记录环境配置中遇到的常见错误以及解决方案 Invalid Gradle JDK configuration found failed Invalid Gradle JDK configuration foundInvalid Gradle JDK configuration found. Open…...
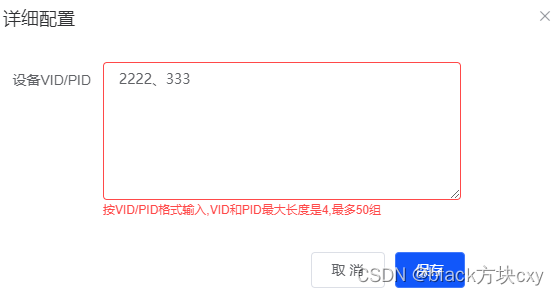
js 正则表达式 验证 :页面中一个输入框,可输入1个或多个vid/pid,使用英文逗号隔开...
就是意思一个输入框里面,按VID/PID格式输入,VID和PID最大长度是4,最多50组 1、页面代码 <el-form ref"ruleForm" :model"tempSet" :rules"rules" label-position"right"> <!-- 最多 50组,每组9个字符…...
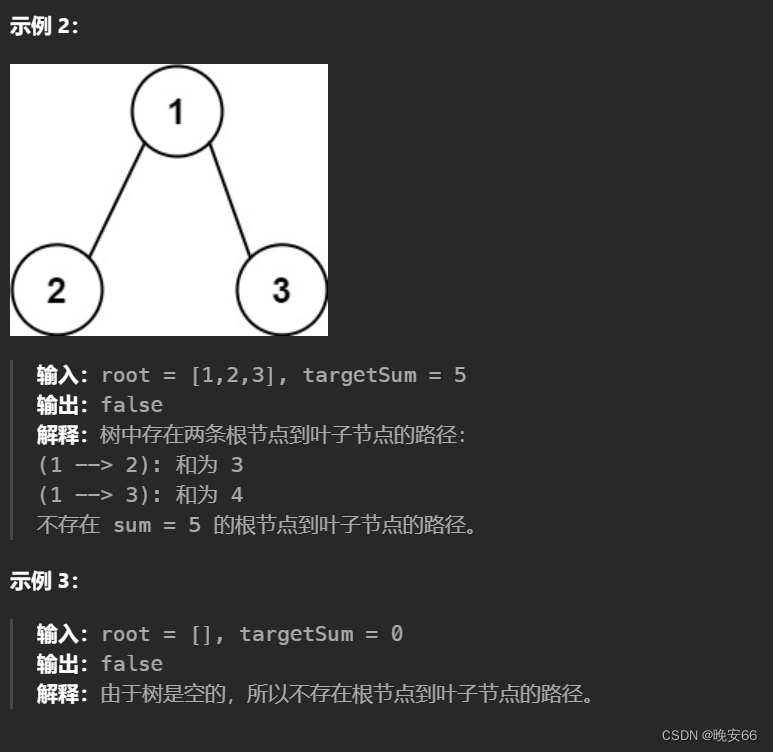
【算法与数据结构】112、LeetCode路径总和
文章目录 一、题目二、解法三、完整代码 所有的LeetCode题解索引,可以看这篇文章——【算法和数据结构】LeetCode题解。 一、题目 二、解法 思路分析:本题通过计算根节点到叶子节点路径上节点的值之和,然后再对比目标值。利用文章【算法和数据…...

NCM格式转换实战指南:ncmdumpGUI全面解析
NCM格式转换实战指南:ncmdumpGUI全面解析 【免费下载链接】ncmdumpGUI C#版本网易云音乐ncm文件格式转换,Windows图形界面版本 项目地址: https://gitcode.com/gh_mirrors/nc/ncmdumpGUI 你是否曾为网易云音乐下载的NCM格式音乐无法在其他设备播…...

期权交易基础框架:模块化设计与Python实现指南
1. 项目概述:一个为期权交易者打造的“乐高积木”底座如果你在量化交易或者期权策略开发领域摸爬滚打过一段时间,大概率会遇到一个共同的痛点:策略想法很多,但把它们变成可回测、可实盘、可管理的代码,却要耗费大量的“…...

g1810,g3810,ip2700,g5080,g1800,ts3380,TS8380,ts6480报错5B00,P07,E08,5b02,1704,1700,5b04,佳能v6.200,亲测有用。
下载:点这里下载 备用下载:https://pan.baidu.com/s/1WrPFvdV8sq-qI3_NgO2EvA?pwd0000 常见型号如下: G系列 G1000、G1100、G1200、G1400、G1500、G1800、G1900、G1010、G1110、G1120、G1410、G1420、G1411、G1510、G1520、G1810、G1820、…...

开源AI代码助手实践:从数据到部署的全链路解析
1. 项目概述:从“copaw-code”看AI代码助手的开源实践最近在GitHub上看到一个挺有意思的项目,叫“QSEEKING/copaw-code”。光看这个名字,可能有点摸不着头脑。“copaw”这个词,听起来像是“co-pilot”(副驾驶ÿ…...

Linux光标主题管理工具x-cursor-help:从原理到实战
1. 项目概述:一个被低估的鼠标光标辅助工具如果你在Linux桌面环境下工作,尤其是使用像GNOME、KDE Plasma这类现代化的桌面环境,你可能会遇到一个不大不小但很恼人的问题:鼠标光标主题的安装和管理。从网上下载了一个漂亮的.tar.gz…...

别再只用高斯噪声了!手把手教你为DDPG算法注入‘惯性’:Ornstein-Uhlenbeck噪声的Python实现与调参实战
突破DDPG探索瓶颈:Ornstein-Uhlenbeck噪声的工程实践指南 在机器人控制或自动驾驶仿真这类连续动作空间的任务中,DDPG算法常因探索效率低下导致训练停滞。当智能体在MuJoCo环境中反复"原地踏步"时,问题往往不在于算法本身…...

AI对话记忆管理实战:memory-organizer库解决长上下文难题
1. 项目概述:一个为AI记忆体“瘦身”与“归档”的利器最近在折腾一些本地大语言模型(LLM)的应用,比如搭建个人知识库助手或者长期对话机器人,一个绕不开的痛点就是“记忆”的管理。模型本身没有持久记忆,每…...

FontForge:从零到一的免费字体设计全攻略
FontForge:从零到一的免费字体设计全攻略 【免费下载链接】fontforge Free (libre) font editor for Windows, Mac OS X and GNULinux 项目地址: https://gitcode.com/gh_mirrors/fo/fontforge 你是否曾经想过亲手设计一款属于自己的字体?也许你为…...

从深夜改格式到一键生成:我的LaTeX参考文献国标化之旅 [特殊字符]
从深夜改格式到一键生成:我的LaTeX参考文献国标化之旅 🎯 【免费下载链接】gbt7714-bibtex-style BibTeX styles for Chinese National Standard GB/T 7714 项目地址: https://gitcode.com/gh_mirrors/gb/gbt7714-bibtex-style 你是否也曾为了论文…...

SuperMap Objects开发避坑指南:从COM引用到内存释放的实战经验总结
SuperMap Objects开发避坑指南:从COM引用到内存释放的实战经验总结 在GIS二次开发领域,SuperMap Objects以其强大的空间数据处理能力备受开发者青睐。然而,当我们将这个COM组件集成到C# WinForms项目中时,往往会遇到一些官方文档…...