(笔记四)利用opencv识别标记视频中的目标
预操作:
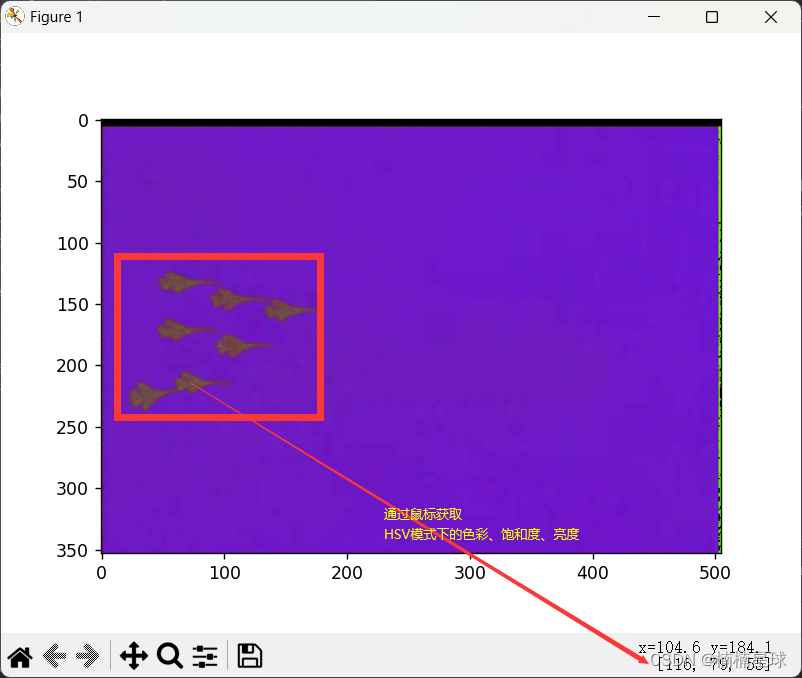
通过cv2将视频的某一帧图片转为HSV模式,并通过鼠标获取对应区域目标的HSV值,用于后续的目标识别阈值区间的选取
 ``
``
img = cv.imread(r"D:\data\123.png")
img = cv.cvtColor(img, cv.COLOR_BGR2HSV)
plt.figure(1), plt.imshow(img)
plt.show()
(1)将视频中识别的目标掩膜成红色
end_frame[mask > 0] = [0, 0, 255]
(2)利用cv库读取显示原始视频
(3)在HSV阈值分割识别的视频目标
hsv = cv.cvtColor(frame, cv.COLOR_BGR2HSV)
# 定义分割黑色的上下区间,其代表的是目标物体的hsv空间内的最小值和最大值
low = np.array([60, 60, 60])
up = np.array([130, 120, 120])
mask = cv.inRange(hsv, low, up)

(4)按位与运算之后的视频目标(目标的真实色彩)
# 进行按位运算,白色的变为frame原来的颜色,其他还是黑色
res = cv.bitwise_and(frame, frame, mask=mask)
(5)主代码(已经给出解释)
#!/usr/bin/env python
# -*- coding:utf-8 -*-
"""
@author: LIFEI
@time: 2023/8/29 14:39
@file: test4.py
@project: pythonProject
@describe: TODO
@# -------------------------------------------------(one)----------------------------------------------
@# -------------------------------------------------(two)----------------------------------------------
"""# -------------------------------------------------(one)----------------------------------------------
import cv2 as cv
import numpy as np
from matplotlib import pyplot as plt# img = cv.imread(r"D:\data\123.png")
# img = cv.cvtColor(img, cv.COLOR_BGR2HSV)
# plt.figure(1), plt.imshow(img)
# plt.show()def identify(path, point):# 创建一个video基类cap = cv.VideoCapture(path)# 当cap被打开时开始循环while cap.isOpened():# 读取视频ret, frame = cap.read()# 拷贝图像,赋值给end_frameend_frame = np.copy(frame)# 将视频的BGR空间转换为HSV空间hsv = cv.cvtColor(frame, cv.COLOR_BGR2HSV)# 定义分割黑色的上下区间,其代表的是目标物体的hsv空间内的最小值和最大值low = np.array([60, 60, 60])up = np.array([130, 120, 120])# 类似与阈值分割,就是将上述的区间类的物体改成白色,其他改为黑色mask = cv.inRange(hsv, low, up)# 进行按位运算,白色的变为frame原来的颜色,其他还是黑色res = cv.bitwise_and(frame, frame, mask=mask)# 将end_frame中的mask白色区域变成红色end_frame[mask > 0] = [0, 0, 255]# 判断帧率是否存在,若是不存在直接退出if not ret:break# 判断输出if point == 1:cv.imshow("frame", frame)elif point == 2:cv.imshow("mask", mask)elif point == 3:cv.imshow("avi", res)else:cv.imshow("end_frame", end_frame)# 这里理解为视频的快慢,1表示原始速度,越大越慢,按‘q’退出显示if cv.waitKey(15) & 0xFF == ord('q'):breakcv.waitKey(0)# 释放cap.release()cv.destroyAllWindows()if __name__ == '__main__':# 视频的路径filepath = r"D:\data\plane.avi"# 访问输入的数值,后续循环要用value = input('请输入一个数字(1表示ori,2表示mask,3表示res,4表示end_frame):')# 转为整型value = int(value)# 开始操作identify(filepath, value)# -------------------------------------------------(two) - -------------------------------------------
相关文章:
(笔记四)利用opencv识别标记视频中的目标
预操作: 通过cv2将视频的某一帧图片转为HSV模式,并通过鼠标获取对应区域目标的HSV值,用于后续的目标识别阈值区间的选取 img cv.imread(r"D:\data\123.png") img cv.cvtColor(img, cv.COLOR_BGR2HSV) plt.figure(1), plt.imshow…...

一、计算机硬件选购
计算机硬件选购 一、设备选购1.1 I/O设备1.2 机箱1.3 主板1.3.1 主板芯片组的命名方式1.3.2 主板版型1.3.3 Z790-a(DDR5)主板参数 1.4 CPU1.5 硬盘1.6 显卡1.7 内存条1.8 散热器(水冷)1.9 电源、风扇、网线、插线板1.9.1 电源1.9.2 风扇1.9.3 网线1.9.4 …...

Dockerfile制作LAMP环境镜像
文章目录 使用Dockerfile制作LAMP环境镜像编写Dockerfile不修改默认页面修改默认页面 Start Script目录结构及文件登录私有仓库给镜像打标签上传镜像页面检查检测镜像可用性 使用Dockerfile制作LAMP环境镜像 编写Dockerfile 不修改默认页面 FROM centos:7 MAINTAINER "…...
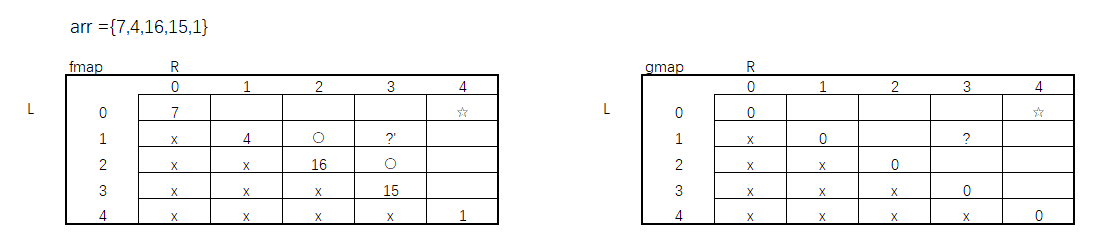
暴力递归转动态规划(二)
上一篇已经简单的介绍了暴力递归如何转动态规划,如果在暴力递归的过程中发现子过程中有重复解的情况,则证明这个暴力递归可以转化成动态规划。 这篇帖子会继续暴力递归转化动态规划的练习,这道题有点难度。 题目 给定一个整型数组arr[]&…...

debian apt error: Package ‘xxx‘ has no installation candidate
新的debian虚拟机可能会出现这个问题。 修改apt的source.list,位于/etc/apt/source.list,添加两行: deb http://deb.debian.org/debian bullseye main deb-src http://deb.debian.org/debian bullseye main执行: sudo apt-get u…...
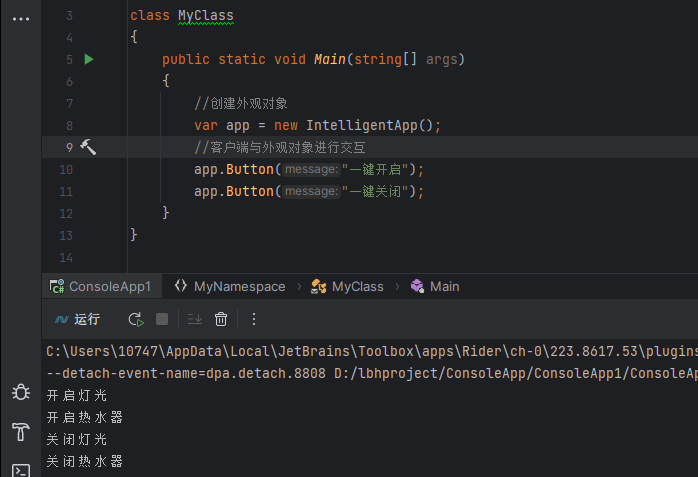
c#设计模式-结构型模式 之 外观模式
概述 外观模式(Facade Pattern)又名门面模式,隐藏系统的复杂性,并向客户端提供了一个客户端可以访问系统的接口。这种类型的设计模式属于结构型模式,它向现有的系统添加一个接口,来隐藏系统的复杂性。该模式…...

Focal Loss-解决样本标签分布不平衡问题
文章目录 背景交叉熵损失函数平衡交叉熵函数 Focal Loss损失函数Focal Loss vs Balanced Cross EntropyWhy does Focal Loss work? 针对VidHOI数据集Reference 背景 Focal Loss由何凯明提出,最初用于图像领域解决数据不平衡造成的模型性能问题。 交叉熵损失函数 …...
运算符(个人学习笔记黑马学习)
算数运算符 加减乘除 #include <iostream> using namespace std;int main() {int a1 10;int a2 20;cout << a1 a2 << endl;cout << a1 - a2 << endl;cout << a1 * a2 << endl;cout << a1 / a2 << endl;/*double a3 …...

开源与专有软件:比较与对比
🌷🍁 博主猫头虎 带您 Go to New World.✨🍁 🦄 博客首页——猫头虎的博客🎐 🐳《面试题大全专栏》 文章图文并茂🦕生动形象🦖简单易学!欢迎大家来踩踩~🌺 &a…...

openResty+lua+redis实现接口访问频率限制
openResty简介: OpenResty 是一个基于 Nginx 与 Lua 的高性能 Web 平台,其内部集成了大量精良的 Lua 库、第三方模块以及大多数的依赖项。用于方便地搭建能够处理超高并发、扩展性极高的动态 Web 应用、Web 服务和动态网关。 OpenResty 通过汇聚各种设…...
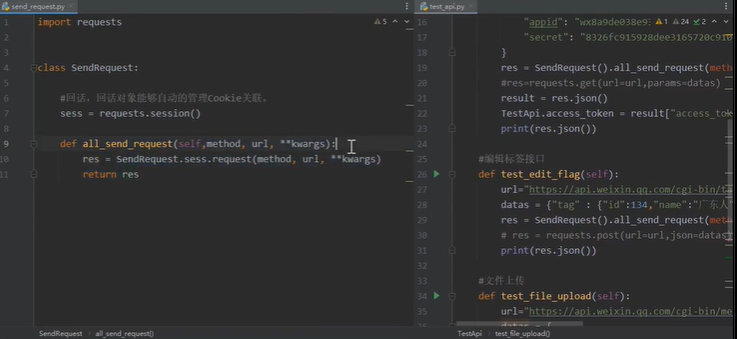
自动化测试(三):接口自动化pytest测试框架
文章目录 1. 接口自动化的实现2. 知识要点及实践2.1 requests.post传递的参数本质2.2 pytest单元测试框架2.2.1 pytest框架简介2.2.2 pytest装饰器2.2.3 断言、allure测试报告2.2.4 接口关联、封装改进YAML动态传参(热加载) 2.3 pytest接口封装ÿ…...

Python --datetime模块
目录 1, 获取datetime时间 2, datetime与timestamp转换 2-1, datetime转timestamp 2-2, timestamp转datetime 3, str格式与datetime转换 3-1, datetime转str格式 3-2, str格式转datetime…...
顺序表链表OJ题(3)——【数据结构】
W...Y的主页 😊 代码仓库分享 💕 前言: 今天是链表顺序表OJ练习题最后一次分享,每一次的分享题目的难度也再有所提高,但是我相信大家都是非常机智的,希望看到博主文章能学到东西的可以一键三连关注一下博主…...

【Azure】Virtual Hub vWAN
虚拟 WAN 文档 Azure 虚拟 WAN 是一个网络服务,其中整合了多种网络、安全和路由功能,提供单一操作界面。 我们主要讨论两种连接情况: 通过一个 vWAN 来连接不通的 vNET 和本地网络。以下是一个扩展的拓扑 结合 vhub,可以把两个中…...

React Navigation 使用导航
在 Web 浏览器中,您可以使用锚标记链接到不同的页面。当用户单击链接时,URL 会被推送到浏览器历史记录堆栈中。当用户按下后退按钮时,浏览器会从历史堆栈顶部弹出该项目,因此活动页面现在是以前访问过的页面。React Native 不像 W…...
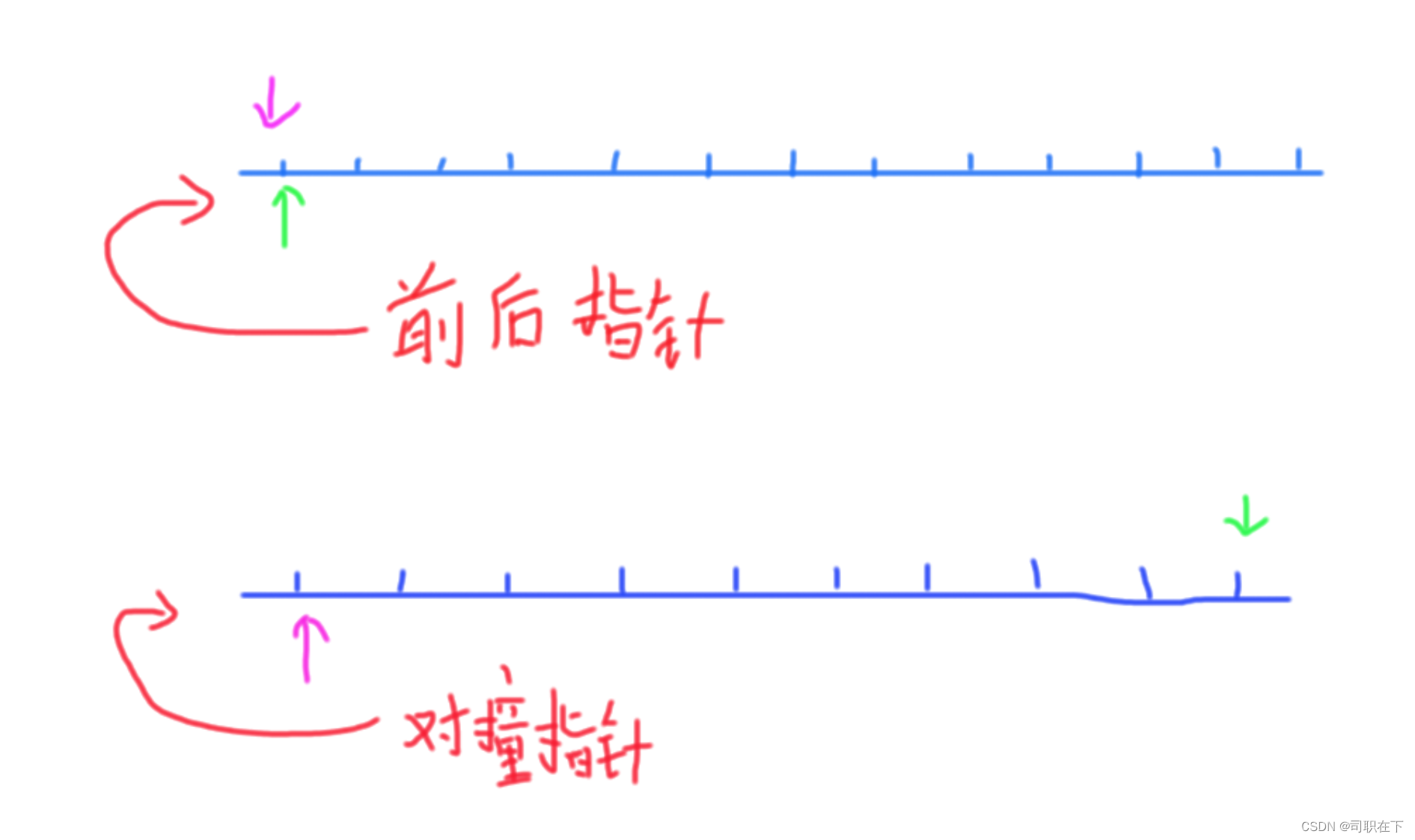
双指针算法,基础算法实践,基本的算法的思想,双指针算法的实现
一,定义 双指针算法是一种常用于解决数组和链表问题的算法技巧。它的核心思想是使用两个指针在数据结构中按照一定的规则移动,从而达到快速搜索或处理数据的目的。这个技巧通常用于优化算法,降低时间复杂度,提高程序的执行效率。…...
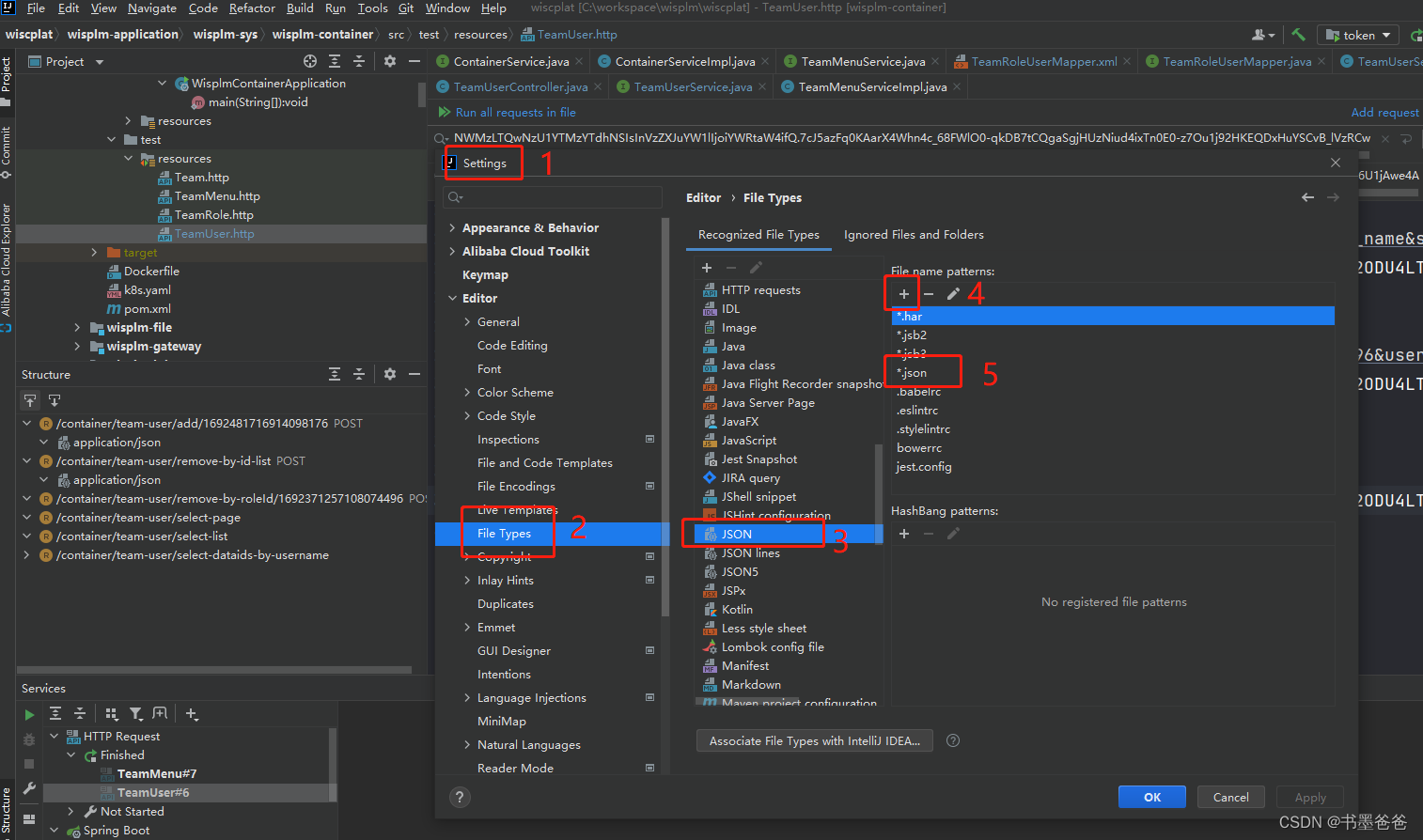
idea http request无法识别环境变量
问题描述 创建了环境变量文件 http-client.env.json,然后在*.http 文件中引用环境变量,运行 HTTP 请求无法读取环境变量文件中定义的变量。 事故现场 IDEA 版本:2020.2 2021.2 解决步骤 2020.2 版本环境变量无法读取 2021.2 版本从 2020.…...

性能测试常见的测试指标
一、什么是性能测试 先看下百度百科对它的定义 性能测试是通过自动化的测试工具模拟多种正常、峰值以及异常负载条件来对系统的各项性能指标进行测试。我们可以认为性能测试是:通过在测试环境下对系统或构件的性能进行探测,用以验证在生产环境下系统性能…...
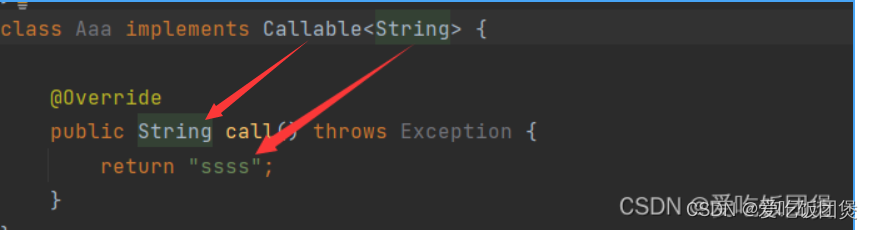
并发 04(Callable,CountDownLatch)详细讲解
并发 Callable 1 可以返回值 2可以抛出异常 泛型指的是返回值的类型 public class Send {public static void main(String[] args) {//怎么启动Callable//new Thread().start();Aaa threadnew Aaa();FutureTask futureTasknew FutureTask(thread);new Thread(futureTask,&qu…...

Json路径表达式
原json路径 {"timeStamp": "20220801110008","transIDO": "6ba9088c981b407fb38feasdf09","version": "1.0.0","signMethod": "md5","content": "{\"companyName\&quo…...

ComfyUI-Manager终极指南:3个核心功能彻底解决AI工作流管理难题
ComfyUI-Manager终极指南:3个核心功能彻底解决AI工作流管理难题 【免费下载链接】ComfyUI-Manager ComfyUI-Manager is an extension designed to enhance the usability of ComfyUI. It offers management functions to install, remove, disable, and enable vari…...

Yokogawa AAI835-H50/K4A00模拟输入/输出模块
Yokogawa AAI835-H50/K4A00 模拟输入/输出模块产品特点:通道配置:共8个通道,含4路模拟输入和4路模拟输出。信号类型:所有通道均支持4-20mA标准电流信号。HART通信:支持HART协议,可与智能现场设备双向数字通…...
)
放弃编码器!纯靠MPU6050和PID算法,手把手教你用TT马达实现平衡小车稳定控制(STM32F103C8T6实战)
纯MPU6050STM32F103的TT马达平衡车实战:无编码器PID控制全解析当大多数平衡小车方案都在强调编码器对速度反馈的不可或缺性时,我们决定挑战一个更极简的配置:仅用5美元的TT马达、9轴的MPU6050和STM32F103C8T6最小系统板,完全舍弃编…...

Sangfor文件夹可以删除吗?【图文讲解】深信服文件夹残留清理?如何彻底删除深信服?Sangfor文件夹是什么?
(1)问题背景打开C盘,突然冒出个Sangfor 文件夹,占用好几个 GB 空间,想删又不敢删,怕删坏系统、断网崩溃;上网一查,说法五花八门,有人说是病毒,有人说是办公软…...

0.2毫秒快速启动的操作系统
在工业控制以及航空航天等核心场景,极速启动就是高可靠系统的生命线。0.2毫秒超快启动搭配硬件看门狗,让设备在掉电重启、异常恢复时瞬时归位,关键任务永不延误! https://www.bilibili.com/video/BV11mLY6VERt/?spm_id_from333.1…...

交流电机驱动器的三种控制模式:前沿切相、后沿切相与同步模式详解
1. 项目概述:一个能玩出花的交流电机驱动器在汽车改装、工业控制或者一些创客项目里,驱动一个交流电机听起来简单,但想让它听话地变速、正反转,甚至实现软启动和精确同步,往往就得搬出笨重又昂贵的工业变频器。今天分享…...

OmenSuperHub:释放惠普游戏本性能的纯净开源控制中心
OmenSuperHub:释放惠普游戏本性能的纯净开源控制中心 【免费下载链接】OmenSuperHub Control Omen laptop performance, fan speeds, and keyboard lighting, and unlock power limits. 项目地址: https://gitcode.com/gh_mirrors/om/OmenSuperHub 还在为官方…...

我们公司全员把 Cursor 换成了自研的 全开源AtomCode
【引子】这是一篇实录——一位 CTO 用 28 天,用 Claude GLM 双模型调度,造出了一个让全公司放弃 Cursor 的工具。然后我意识到我们正在经历的事情,比"换工具"大得多。【读者承诺】接下来 15 分钟,你会拿到三件东西:一个真实案例(28 天 1,146 commits 是怎么做出来的…...

微信小程序项目实战:从npm安装Vant Weapp到解决样式冲突的完整避坑指南
微信小程序工程化实战:Vant Weapp集成与样式冲突解决方案全解析 第一次在小程序里引入Vant Weapp时,我对着满屏错位的组件样式发呆了半小时——原本优雅的按钮变成了扭曲的色块,表单元素叠在一起像抽象画。这不是个例,根据社区反…...

3个实用场景教你轻松解锁网易云音乐NCM加密文件:ncmdumpGUI完整指南
3个实用场景教你轻松解锁网易云音乐NCM加密文件:ncmdumpGUI完整指南 【免费下载链接】ncmdumpGUI C#版本网易云音乐ncm文件格式转换,Windows图形界面版本 项目地址: https://gitcode.com/gh_mirrors/nc/ncmdumpGUI 你是否曾经下载了网易云音乐的…...