STM32CUBEMX_创建时间片轮询架构的软件框架
STM32CUBEMX_创建时间片轮询架构的软件框架
说明:
1、这种架构避免在更新STM32CUBEMX配置后把用户代码清除掉
2、利用这种时间片的架构可以使得代码架构清晰易于维护
创建步骤:
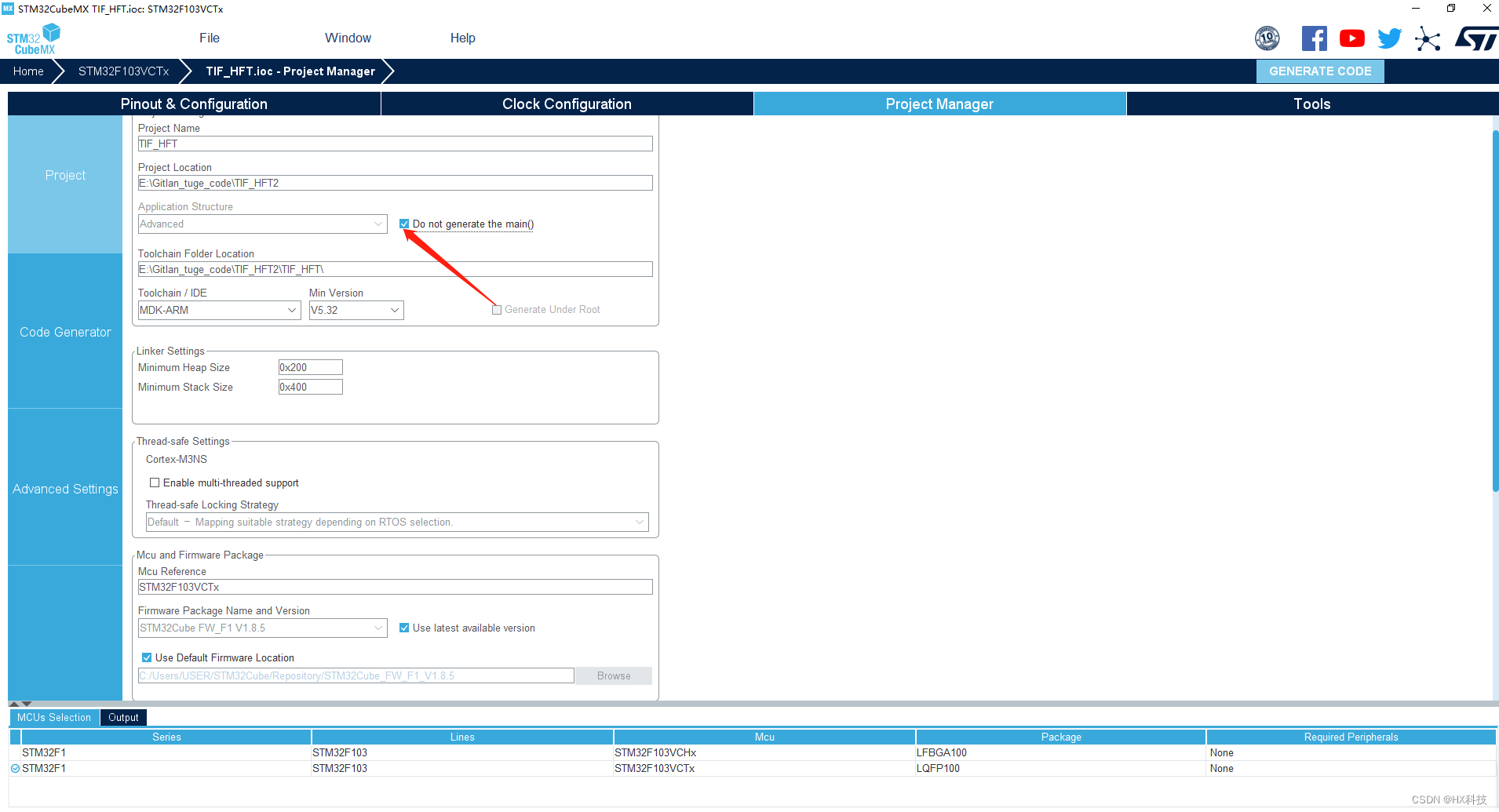
1、使用STM32CUBEMX创建基础工程
2、新建用户代码目录
3、构建基础的代码框架
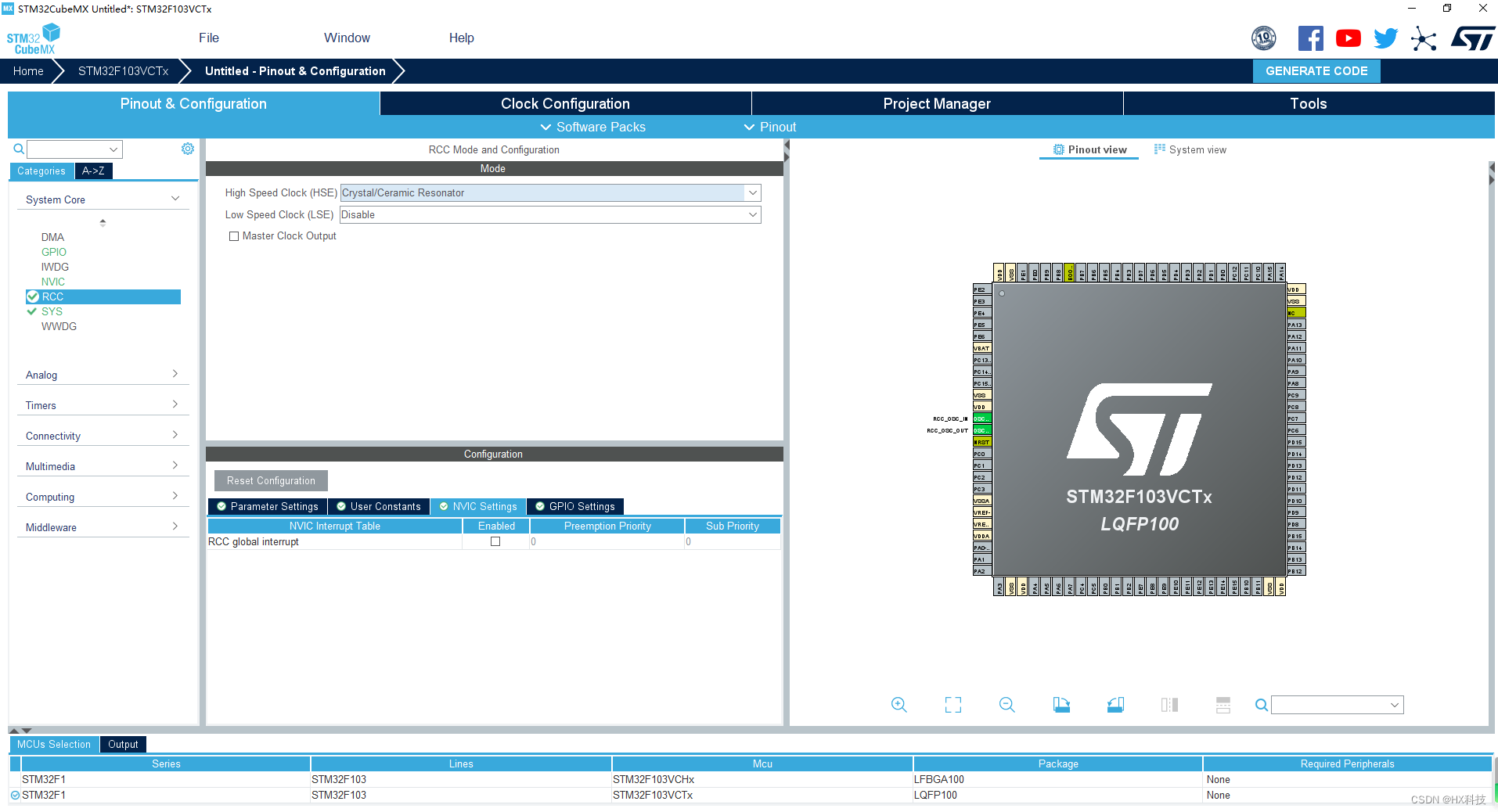
1、使用STM32CUBEMX创建基础工程
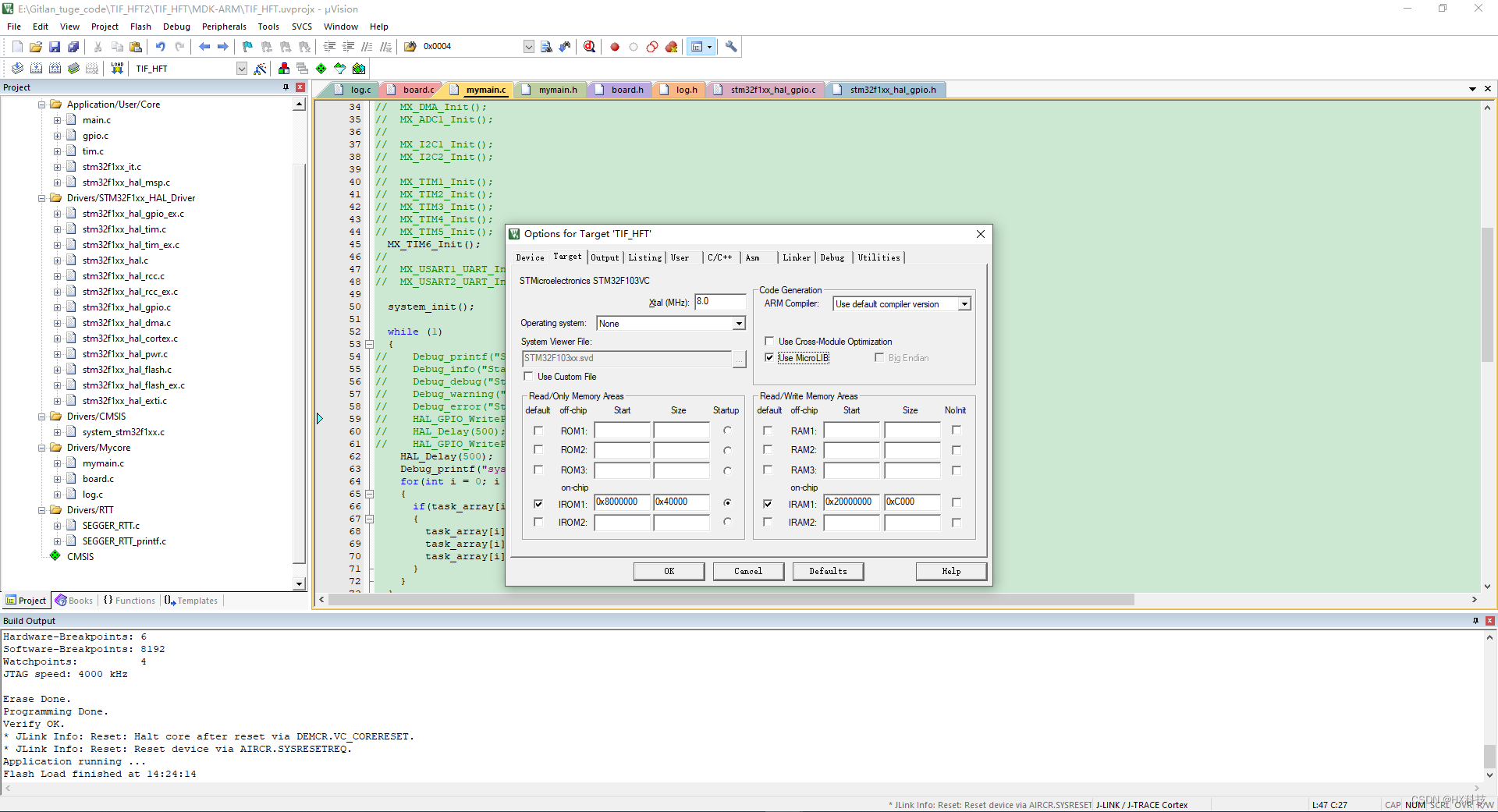
选择外部高速时钟
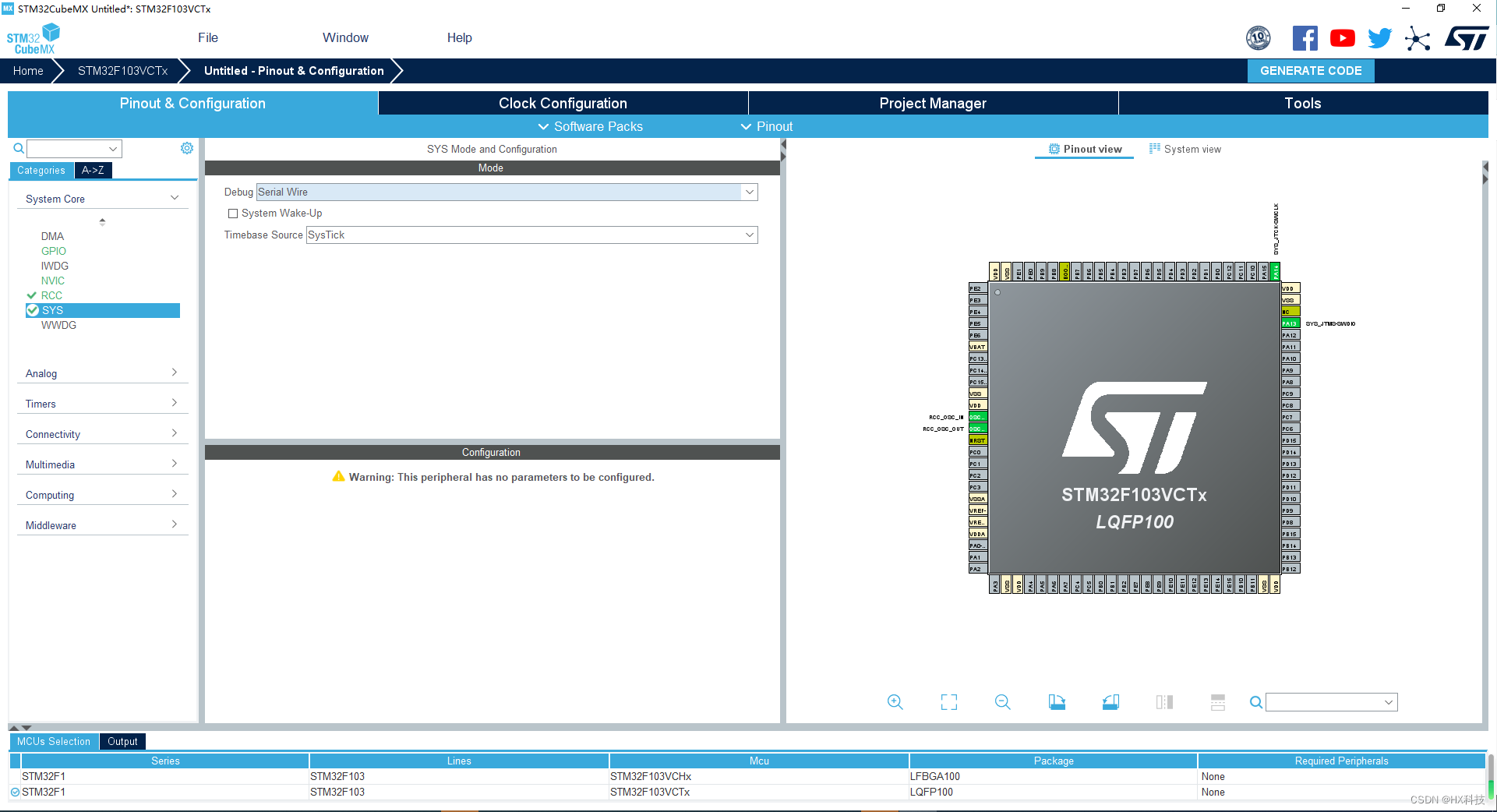
配置下载调试接口
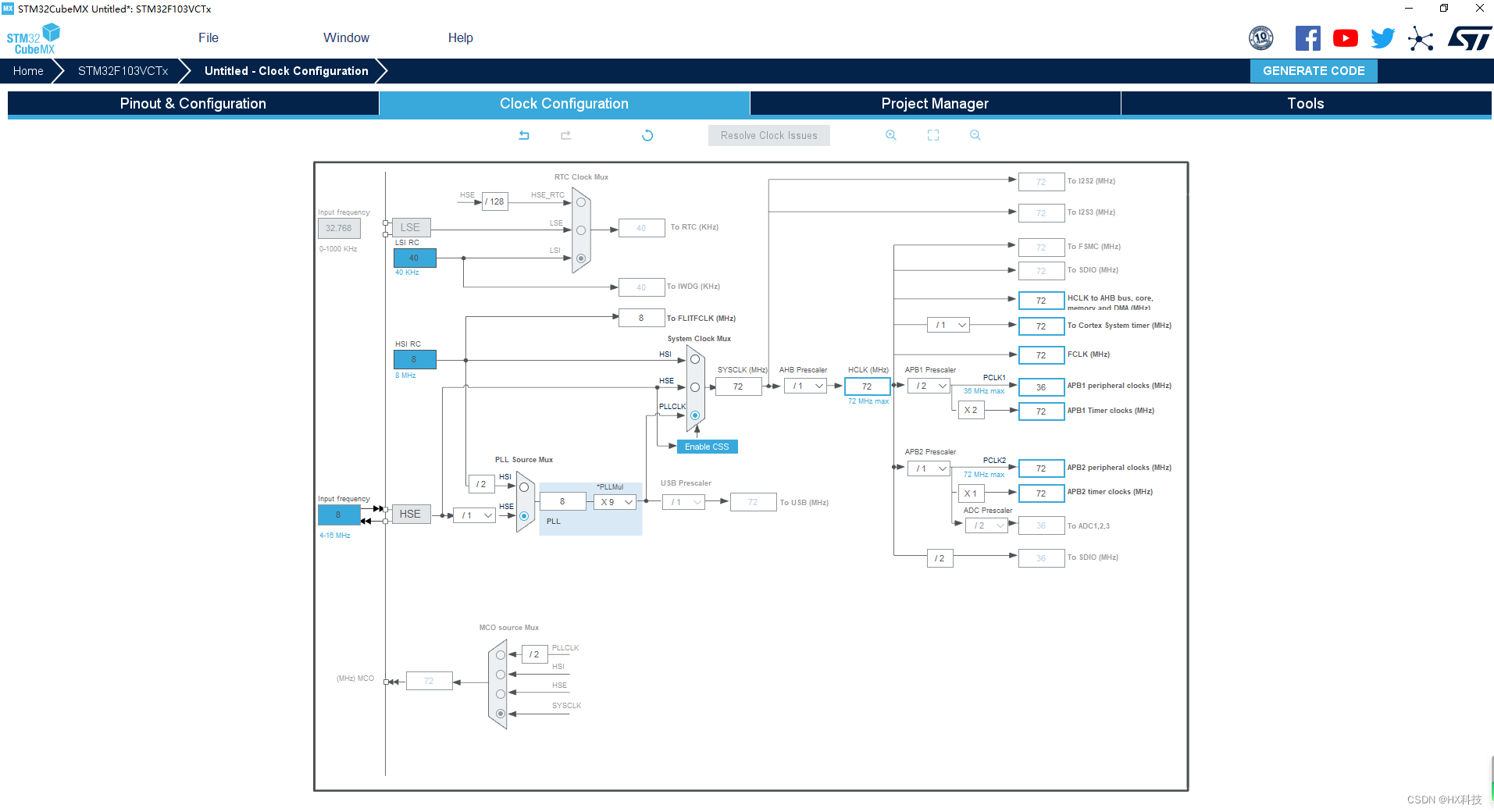
配置时钟线
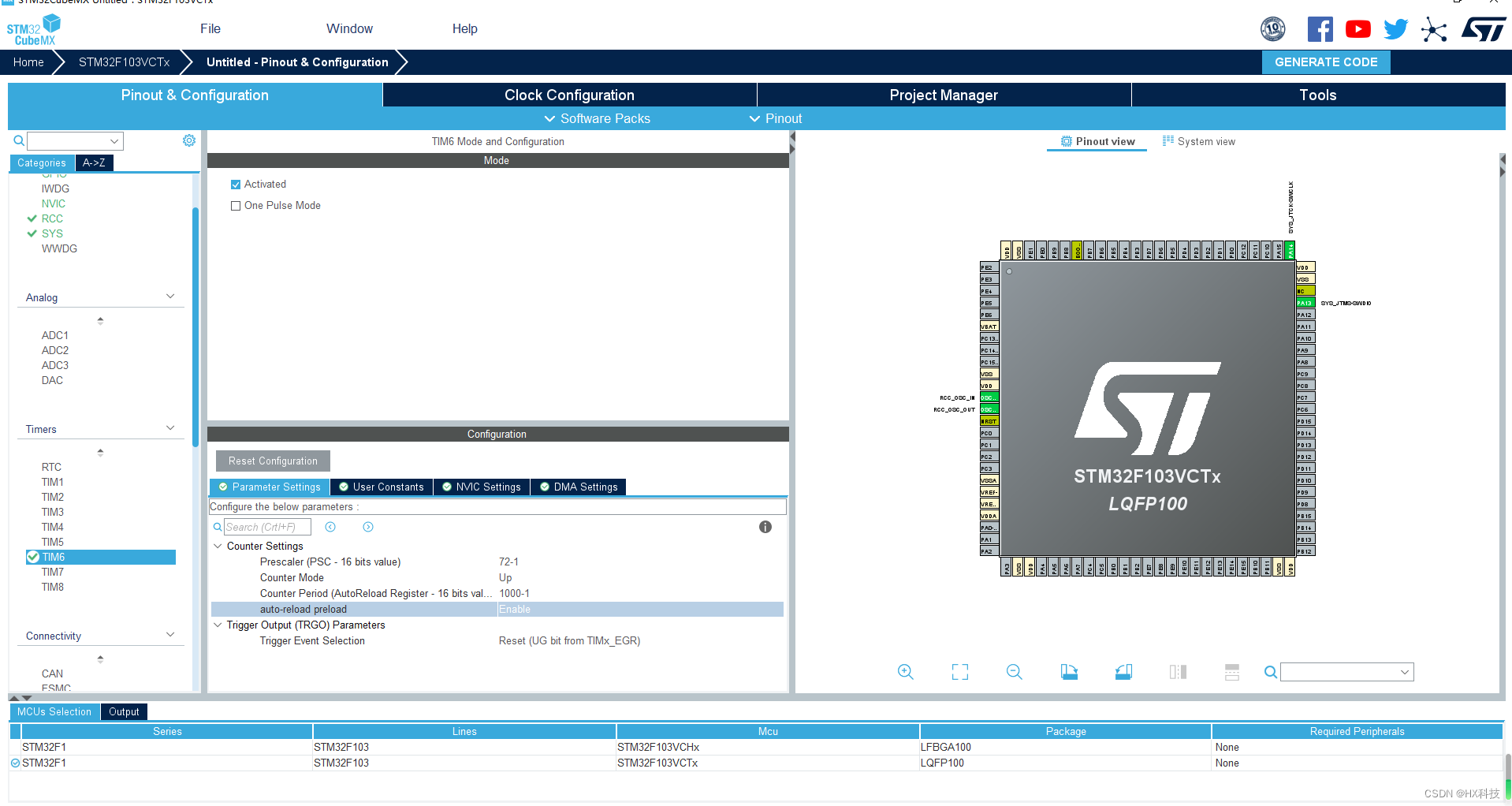
开一个只有定时功能的定时器(中断1ms)
配置工程
2、新建用户代码目录
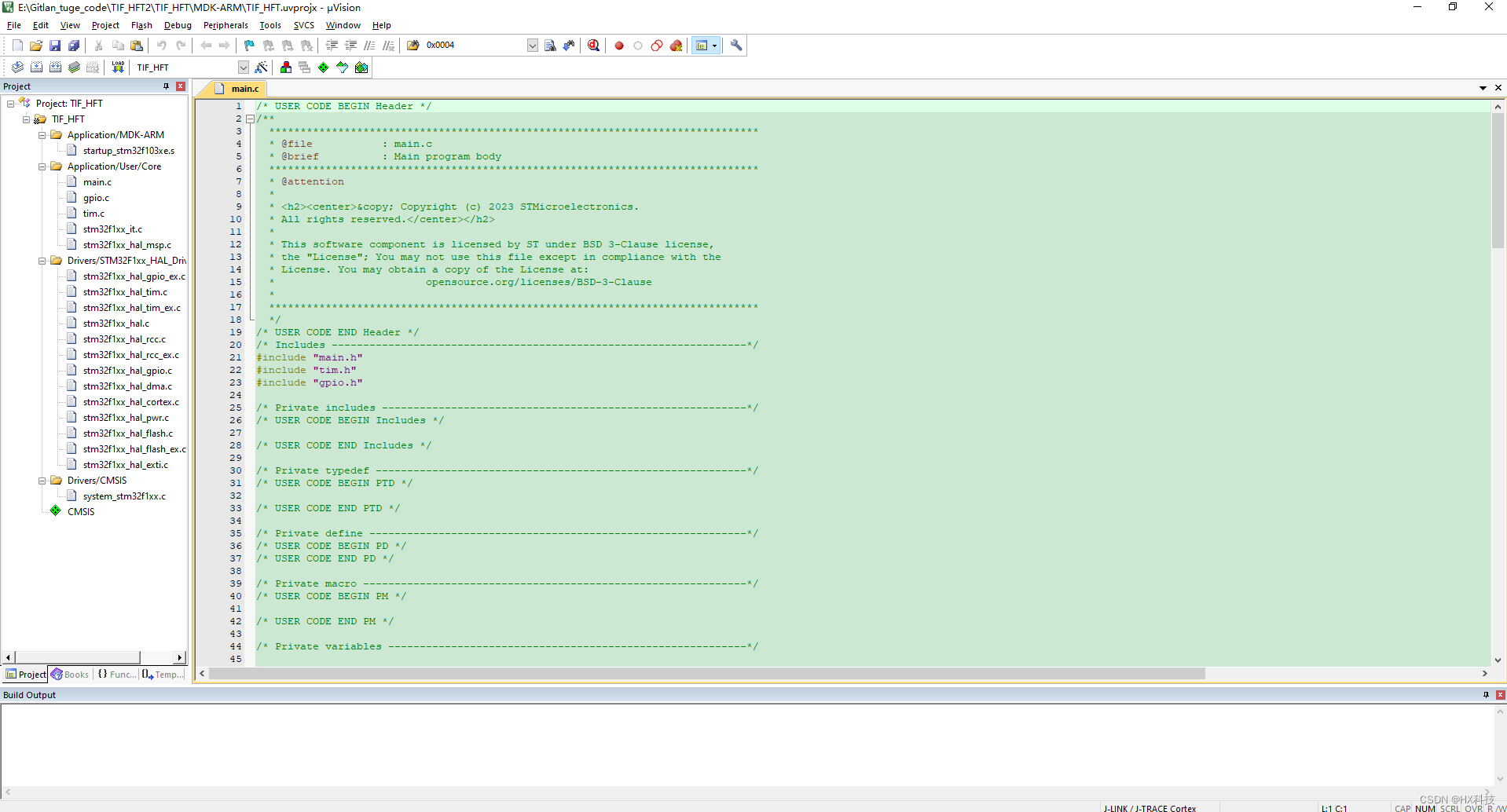
打开KEIL工程
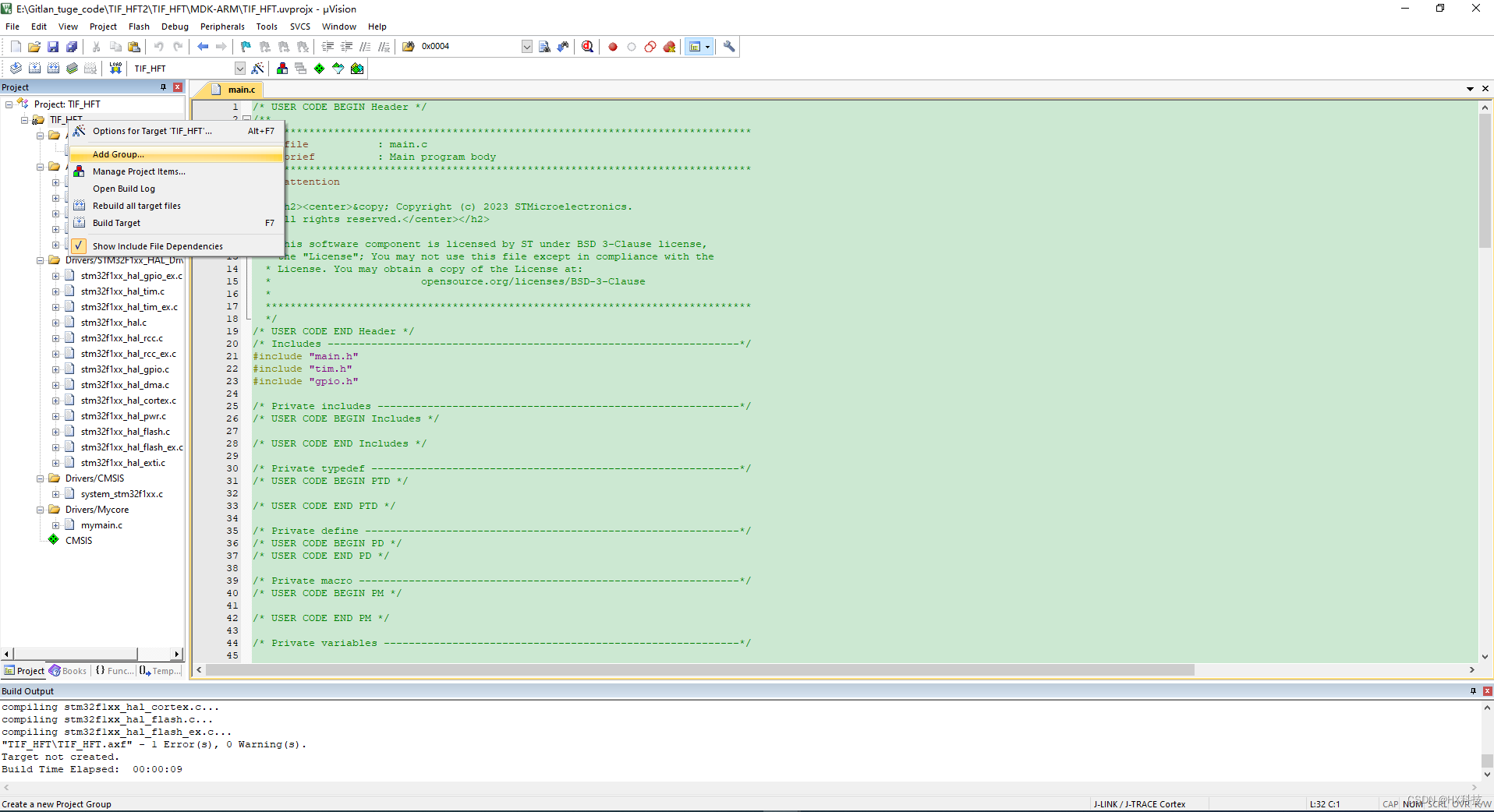
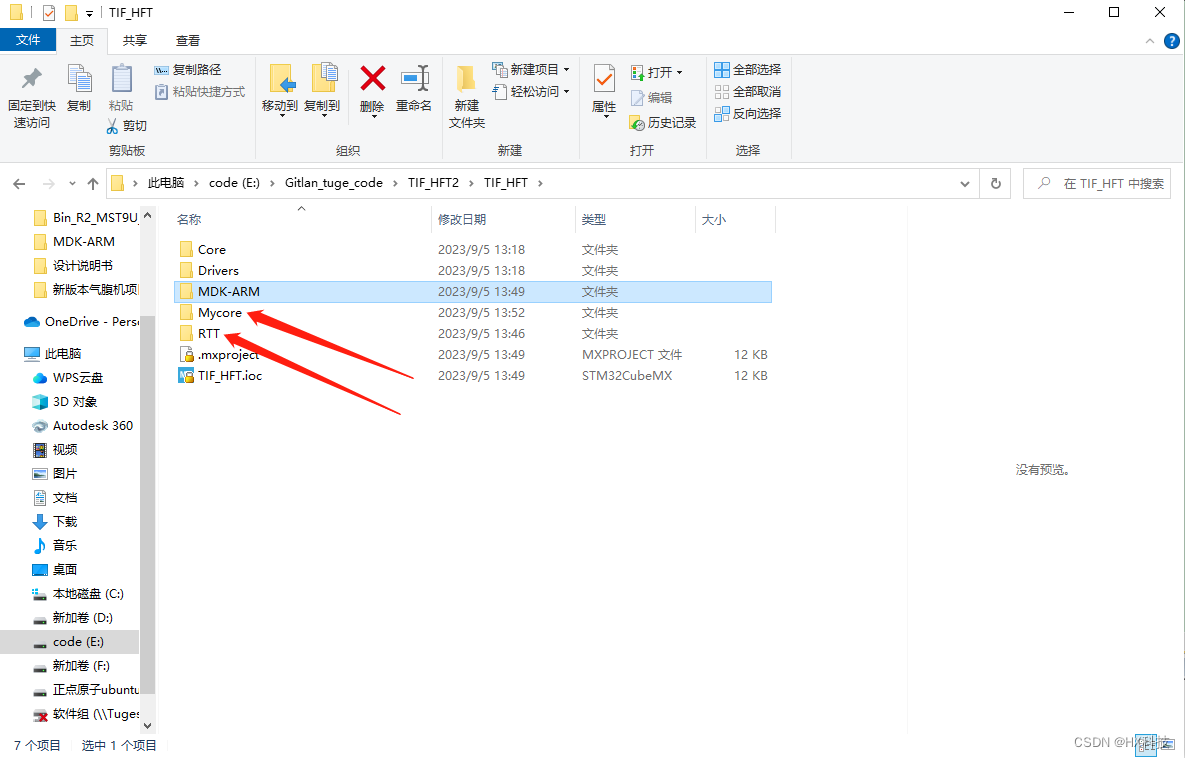
创建两个文件夹目录
把实际的这两个目录文件夹从别的工程拷贝到本工程根目录下或者是自己新建
添加文件

添加文件之后的实际效果

包含头文件
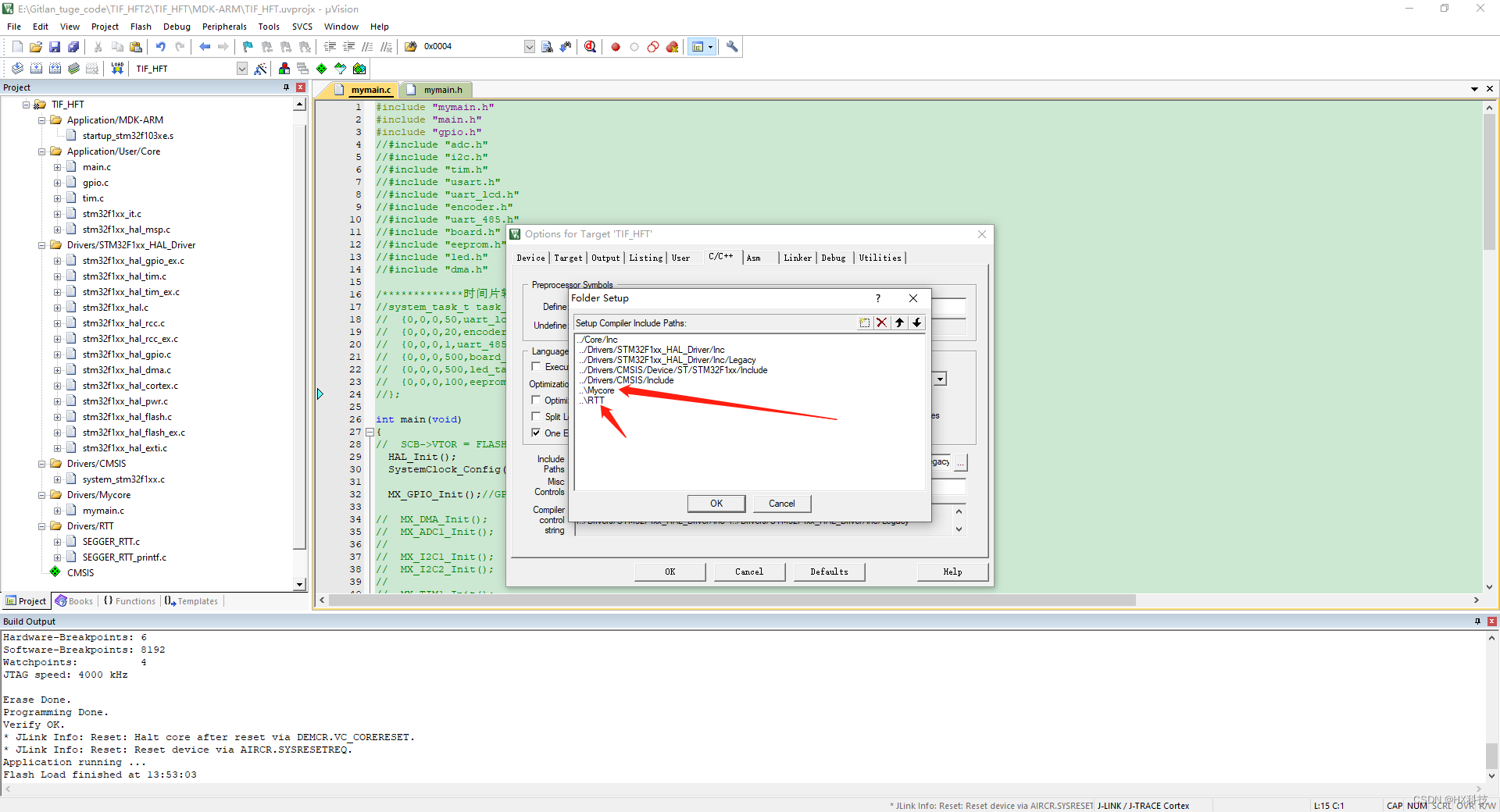
必须要勾选microlib才能打印日志
然后写一个闪灯的测试程序可以发现整个工程按照我们的意愿编译成功并且可以正常运行
3、构建基础的代码框架
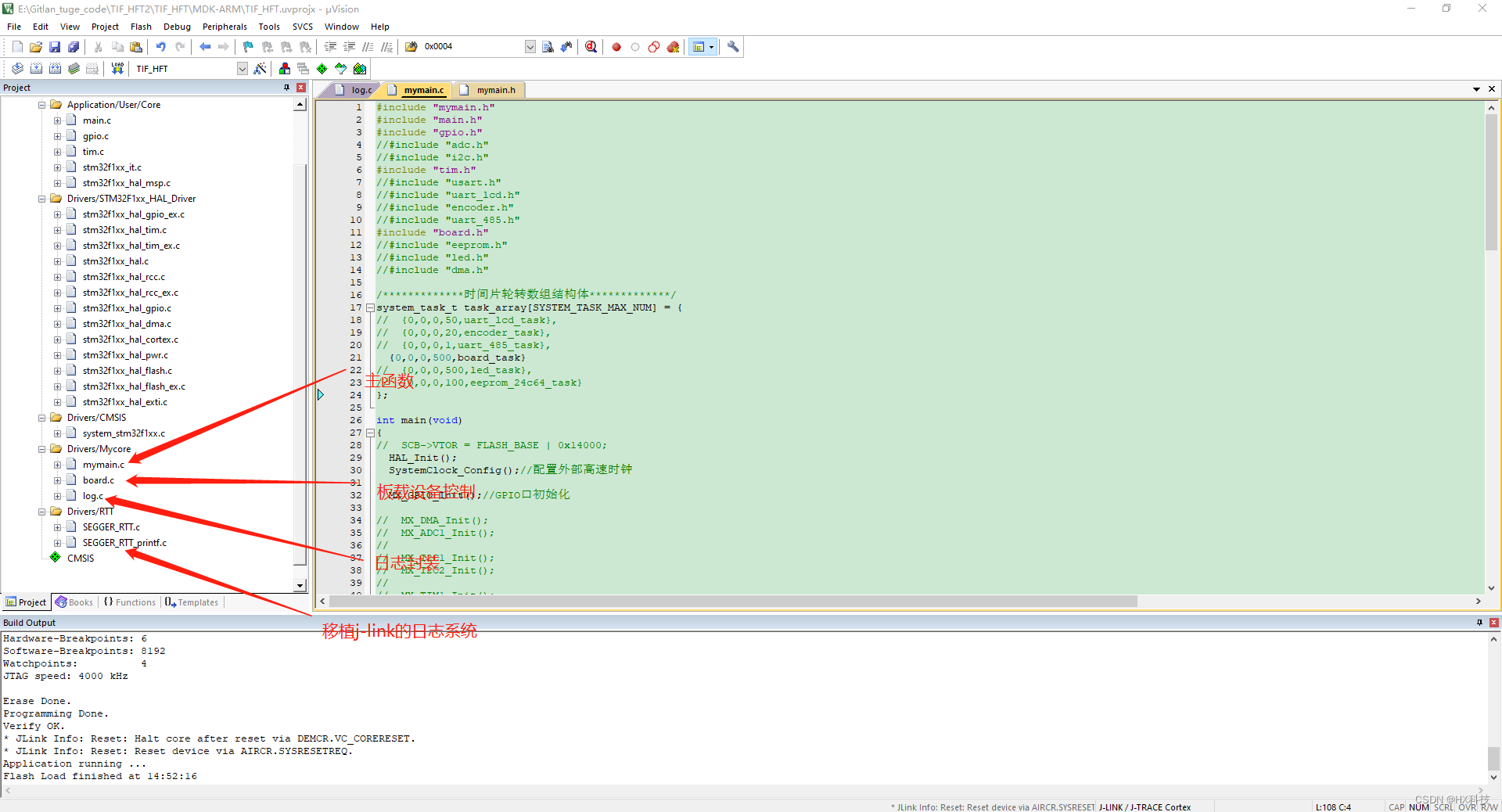
mymain.c
#include "mymain.h"
#include "main.h"
#include "gpio.h"
//#include "adc.h"
//#include "i2c.h"
#include "tim.h"
//#include "usart.h"
//#include "uart_lcd.h"
//#include "encoder.h"
//#include "uart_485.h"
#include "board.h"
//#include "eeprom.h"
//#include "led.h"
//#include "dma.h"/*************时间片轮转数组结构体*************/
system_task_t task_array[SYSTEM_TASK_MAX_NUM] = {
// {0,0,0,50,uart_lcd_task},
// {0,0,0,20,encoder_task},
// {0,0,0,1,uart_485_task},{0,0,0,500,board_task}
// {0,0,0,500,led_task},
// {0,0,0,100,eeprom_24c64_task}
};int main(void)
{
// SCB->VTOR = FLASH_BASE | 0x14000; HAL_Init();SystemClock_Config();//配置外部高速时钟MX_GPIO_Init();//GPIO口初始化// MX_DMA_Init();
// MX_ADC1_Init();
//
// MX_I2C1_Init();
// MX_I2C2_Init();
//
// MX_TIM1_Init();
// MX_TIM2_Init();
// MX_TIM3_Init();
// MX_TIM4_Init();
// MX_TIM5_Init();MX_TIM6_Init();
//
// MX_USART1_UART_Init();
// MX_USART2_UART_Init();system_init();while (1){
// Debug_printf("StartDefaultTask:%f",1.153);
// Debug_info("StartDefaultTask:%d",253);
// Debug_debug("StartDefaultTask:%f",3.153);
// Debug_warning("StartDefaultTask:%f",4.153);
// Debug_error("StartDefaultTask:%f",5.153);
// HAL_GPIO_WritePin(GPIOE, GPIO_PIN_8, GPIO_PIN_SET);
// HAL_Delay(500);
// HAL_GPIO_WritePin(GPIOE, GPIO_PIN_8, GPIO_PIN_RESET);
// HAL_Delay(500);for(int i = 0; i < SYSTEM_TASK_MAX_NUM; i++) //任务状态判断执行{if(task_array[i].taskStatus == 1){ task_array[i].task_function();task_array[i].taskCount = 0; task_array[i].taskStatus = 0;} }}
}void system_init(void)
{
// HAL_Delay(2000); //等待串口屏启动完成
// eeprom_24c64_init();
// board_init();
// uart_485_init();
// uart_lcd_init();
// led_init();
//
// HAL_TIM_Base_Start_IT(&htim1);HAL_TIM_Base_Start_IT(&htim6);
// HAL_TIM_PWM_Start(&htim2,TIM_CHANNEL_2);
// HAL_TIM_PWM_Start(&htim3,TIM_CHANNELmymain.h
#ifndef __MYMAIN_H
#define __MYMAIN_H
#include "log.h"extern void SystemClock_Config(void);#define SYSTEM_TASK_MAX_NUM 1 //任务数量typedef struct system_task
{unsigned char taskStatus; //任务运行状态unsigned char taskPriority; //任务运行优先级unsigned int taskCount; //任务运行中计数unsigned int taskInterva1; //任务运行时间间隔(单位:ms)void (* task_function)(void); //任务运行的回调函数
}system_task_t;void system_init(void);#endifboard.c
#include "board.h"void board_init(void)
{BOARD_LED_OFF;
// BOARD_FUN_SPEED;
}void board_task(void)
{BOARD_LED_CYCLE;Debug_printf("system run ......\r\n");
}board.h
#ifndef __BOARD_H
#define __BOARD_H
#include "main.h"
#include "log.h"
#include "tim.h"/********1~5档位,档位越高风扇转速越高*******/
enum{board_fun_one = 3600,board_fun_two = 2700,board_fun_three = 1800,board_fun_four = 1200,board_fun_five = 600,
};#define BOARD_PIN_LED GPIO_PIN_8
#define BOARD_LED_ON HAL_GPIO_WritePin(GPIOE, BOARD_PIN_LED, GPIO_PIN_RESET)
#define BOARD_LED_OFF HAL_GPIO_WritePin(GPIOE, BOARD_PIN_LED, GPIO_PIN_SET)
#define BOARD_LED_CYCLE HAL_GPIO_TogglePin(GPIOE, BOARD_PIN_LED)//#define BOARD_FUN_SPEED __HAL_TIM_SET_COMPARE(&htim5,TIM_CHANNEL_1,board_fun_three); //板载风扇转速与占空比成反比,机箱散热风扇
//#define BOARD_FUN2_SPEED __HAL_TIM_SET_COMPARE(&htim5,TIM_CHANNEL_2,board_fun_three); //板载风扇转速与占空比成反比,灯珠散热风扇void board_task(void);
void board_init(void);#endiflog.c
#include "log.h"#ifdef __GNUC__
#define PUTCHAR_PROTOTYPE int __io_putchar(int ch)
#else
#define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f)
#endifPUTCHAR_PROTOTYPE
{SEGGER_RTT_PutChar(0, ch); //重映射RTTreturn ch;
}log.h
#ifndef __LOG_H
#define __LOG_H
#include "stdio.h"
#include "SEGGER_RTT.h"#define USER_DEBUG_EN 1 //用户使用日志打印的总开关#ifdef USER_DEBUG_EN#define Debug_printf(format, ...) printf(RTT_CTRL_TEXT_WHITE format , ##__VA_ARGS__)//"\r\n"#define Debug_info(format, ...) printf(RTT_CTRL_TEXT_GREEN"[main]info:" format "\r\n", ##__VA_ARGS__)#define Debug_debug(format, ...) printf(RTT_CTRL_TEXT_WHITE"[main]debug:" format "\r\n", ##__VA_ARGS__)#define Debug_warning(format, ...) printf(RTT_CTRL_TEXT_YELLOW"[main]debug:" format "\r\n", ##__VA_ARGS__)#define Debug_error(format, ...) printf(RTT_CTRL_TEXT_RED"[main]error:" format "\r\n",##__VA_ARGS__)
#else#define Debug_printf(format, ...)#define Debug_info(format, ...)#define Debug_debug(format, ...)#define Debug_warning(format, ...)#define Debug_error(format, ...)
#endif#endif相关文章:
STM32CUBEMX_创建时间片轮询架构的软件框架
STM32CUBEMX_创建时间片轮询架构的软件框架 说明: 1、这种架构避免在更新STM32CUBEMX配置后把用户代码清除掉 2、利用这种时间片的架构可以使得代码架构清晰易于维护 创建步骤: 1、使用STM32CUBEMX创建基础工程 2、新建用户代码目录 3、构建基础的代码框…...

vue 插槽Slots
vue插槽官网 <button class"fancy-btn"><slot></slot> <!-- 插槽出口 --> </button><slot> 元素是一个插槽出口 (slot outlet),标示了父元素提供的插槽内容 (slot content) 将在哪里被渲染。 // 定义一个Child.vue…...
论文阅读《Nougat:Neural Optical Understanding for Academic Documents》
摘要 科学知识主要存储在书籍和科学期刊中,通常以PDF的形式。然而PDF格式会导致语义信息的损失,特别是对于数学表达式。我们提出了Nougat,这是一种视觉transformer模型,它执行OCR任务,用于将科学文档处理成标记语言&a…...

较难的换根dp:P6213 「SWTR-04」Collecting Coins
传送门 前题提要:感觉这道换根dp可以说是集中了换根dp的所有较高难度的操作和思想,以及较高的一些实现细节,可以说能够完全写出这道题才叫真正理解了换根dp,非常值得一做. 首先读完题意,不难发现这道题有很多限制.点的访问次数限制,必须访问某一个点,想要获得最大的贡献,没有…...

Springboot - 15.二级分布式缓存集成-Caffeine
👀中文文档 Caffeine 👀使用Caffeine (本地缓存) 当与Spring Boot结合使用时,Caffeine提供了一个直观且功能强大的二级缓存解决方案。Spring Boot的缓存抽象使得整合Caffeine变得相当简单。以下是如何在Spring Boot…...
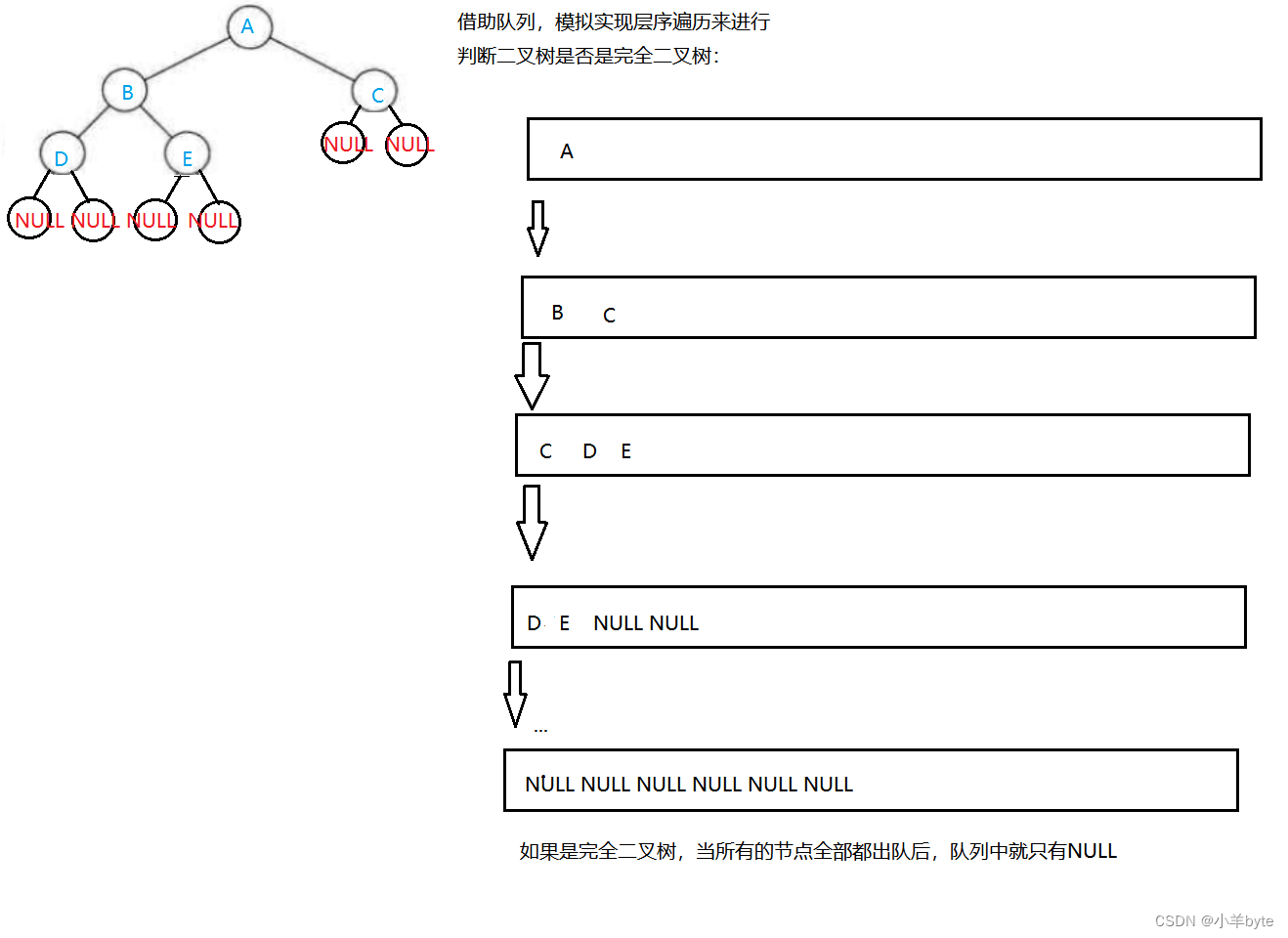
二叉树的介绍及二叉树的链式结构的实现(C语言版)
前言 二叉树是一种特殊的树,它最大的度为2,每个节点至多只有两个子树。它是一种基础的数据结构,后面很多重要的数据结构都是依靠它来进行实现的。了解并且掌握它是很重要的。 目录 1.二叉树的介绍 1.1概念 1.2现实中的二叉树 1.3特殊的二叉…...
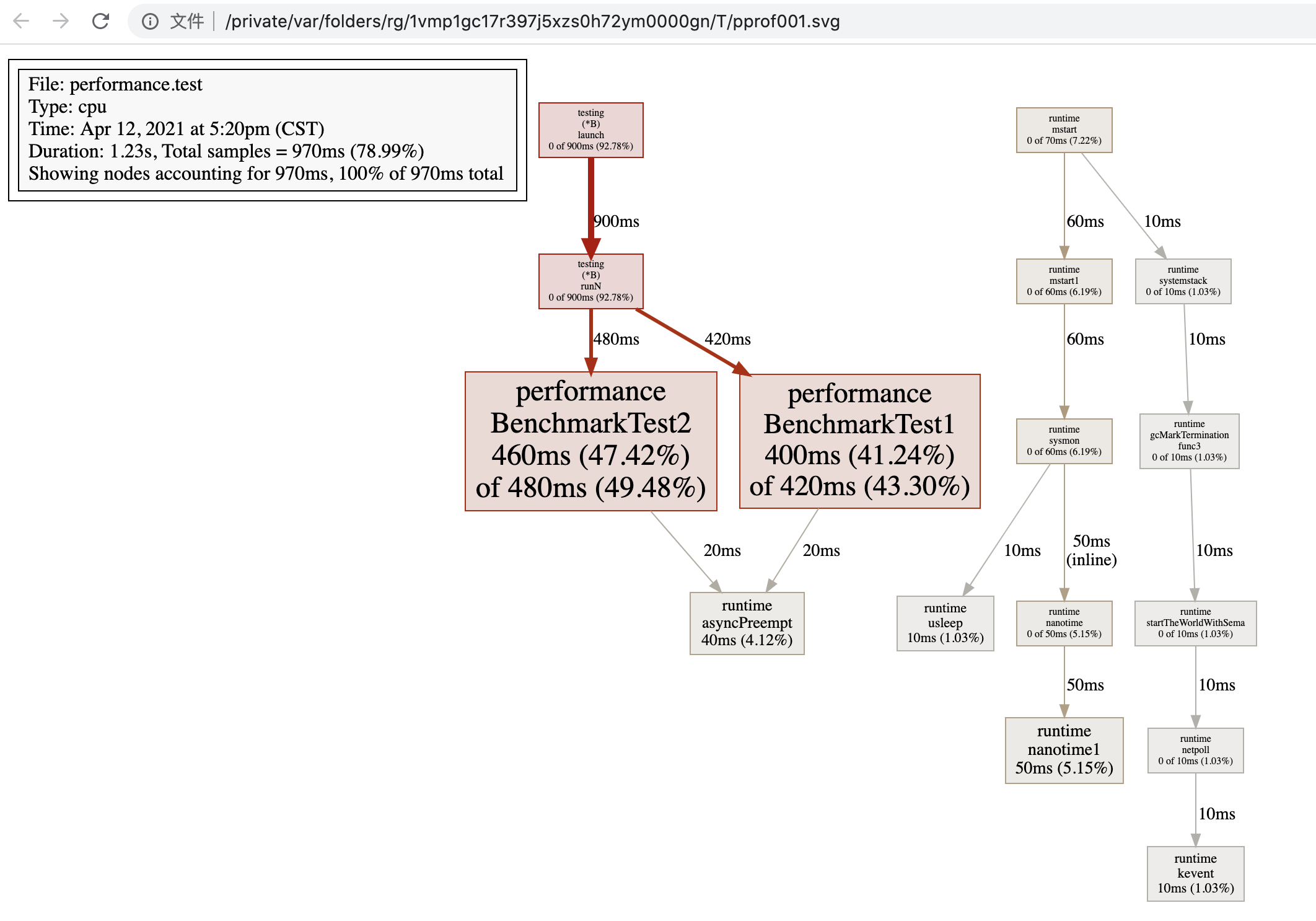
不同写法的性能差异
“ 达到相同目的,可以有多种写法,每种写法有性能、可读性方面的区别,本文旨在探讨不同写法之间的性能差异 len(str) vs str "" 本部分参考自: [问个 Go 问题,字符串 len 0 和 字符串 "" ,有啥区别?](https://segmentf…...
Bytebase 2.7.0 - 新增分支(Branching)功能
🚀 新功能 新增支持与 Git 类似的分支(Branching)功能来管理 schema 变更。支持搜索所有历史工单。支持导出审计日志。 🎄 改进 变更数据库工单详情页面全新改版。优化工单搜索体验。SQL 审核规则支持针对不同数据库进行独立配…...

day55 动规.p15 子序列
- 392.判断子序列 cpp class Solution { public: bool isSubsequence(string s, string t) { vector<vector<int>> dp(s.size() 1, vector<int>(t.size() 1, 0)); for (int i 1; i < s.size(); i) { for (int j 1; …...

TypeScript DOM类型的声明
TS DOM类型的声明 lib.dom.d.ts HTMLInputElement <input type"text" change"handleChange" /> const handleChange (evt: Event) > {console.log((evt.target as HTMLInputElement).value); } HTMLElement const div: HTMLDivElement do…...
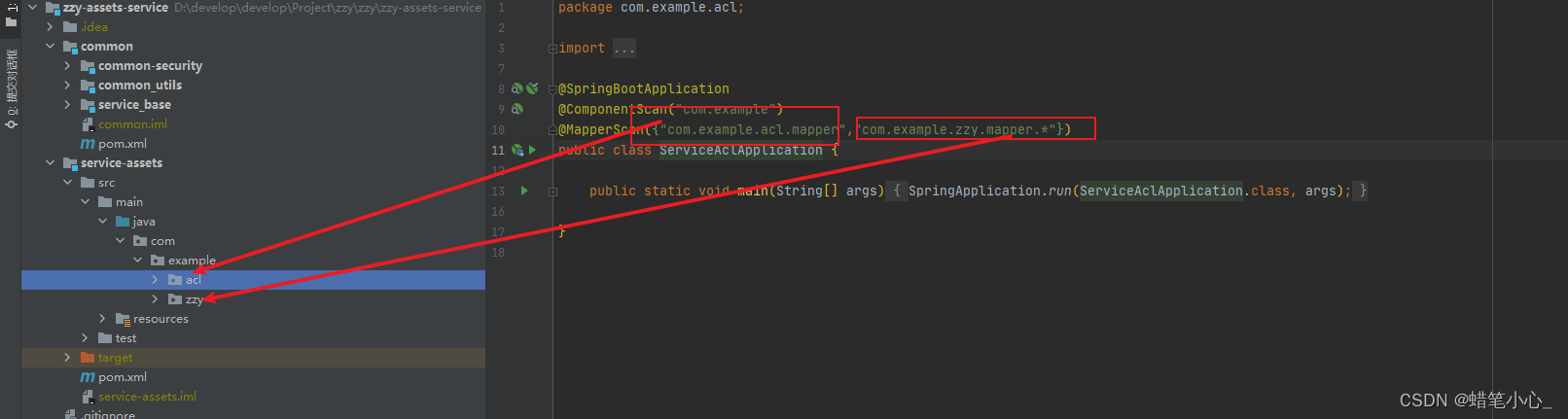
springboot找不到注册的bean
1、错误描述 A component required a bean named ‘fixedAssetsShareMapper’ that could not be found.Action:Consider defining a bean named ‘fixedAssetsShareMapper’ in your configuration.2、问题分析 1、该错误提示表明在你的应用程序中有一个组件(可能…...
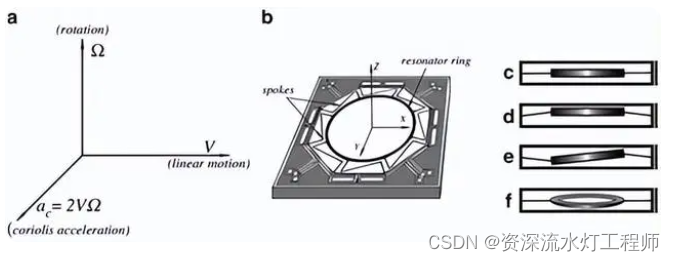
MEMS传感器的原理与构造——单片式硅陀螺仪
一、前言 机械转子式陀螺仪在很长的一段时间内都是唯一的选项,也正是因为它的结构和原理,使其不再适用于现代小型、单体、集成式传感器的设计。常规的机械转子式陀螺仪包括平衡环、支撑轴承、电机和转子等部件,这些部件需要精密加工和…...

Redis集群服务器
集群简介 试想有一家餐厅,如果顾客人数较少,那么餐厅只需要一个服务员即可,如图1。但是,当顾客人数非常多时,一个服务员是绝对不够的,如图2。此时,餐厅需要雇用更多的服务员来解决大量访问&…...
动态维护直径 || 动态维护树上路径 || 涉及LCA点转序列 || 对欧拉环游序用数据结构维护:1192B
https://www.luogu.com.cn/problem/CF1192B 对于直径的求法,常用dp或两次dfs,但如果要动态维护似乎都不太方面,那么可以维护树上路径最大值。 树上路径为: d e p u d e p v − 2 d e p l c a ( u , v ) dep_udep_v-2\times de…...
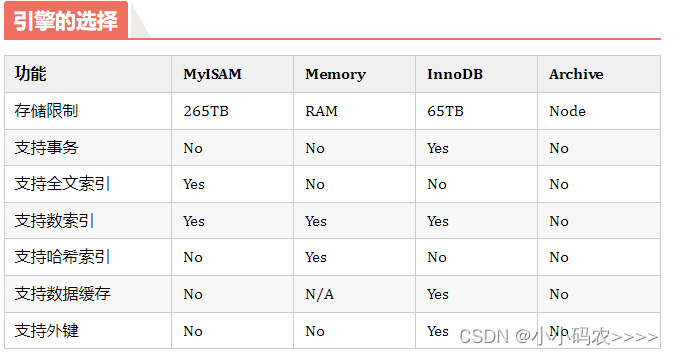
MySQL 存储引擎,你了解几个?
引言 MySQL是一种流行的关系型数据库管理系统(RDBMS),它支持多种不同的数据库引擎。数据库引擎是用于存储、管理和检索数据的核心组件,它们直接影响着数据库的性能、可靠性和功能,接下来本文介绍下一些常见的MySQL数据…...
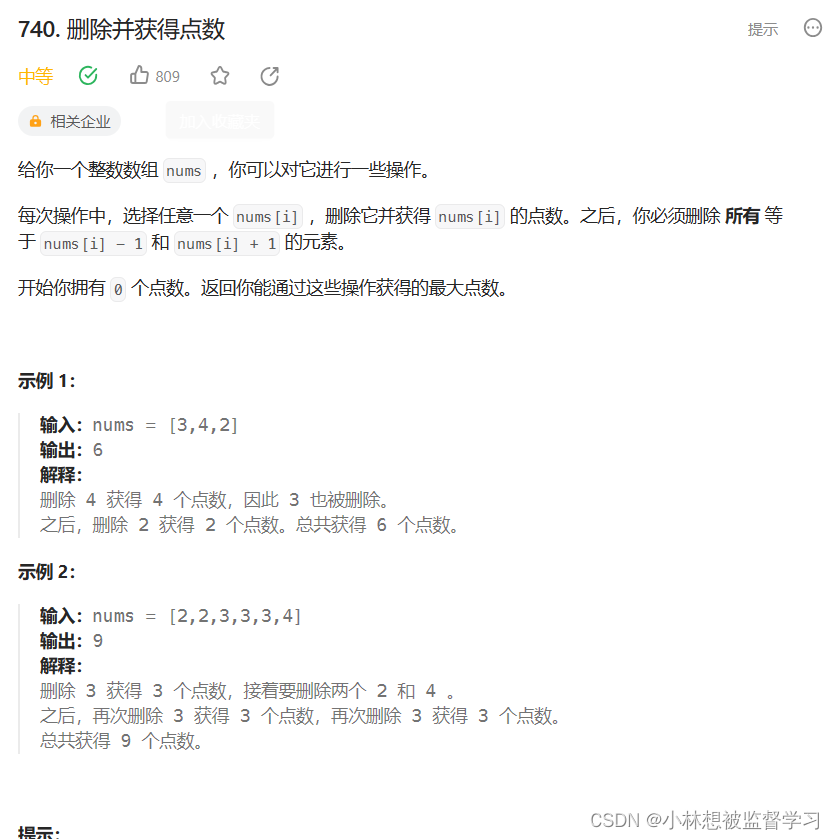
Java 动态规划 Leetcode 740. 删除并获得点数
题目 对于该题的题目分析,已经代码分析都一并写入到了代码注释中 代码 class Solution {public int deleteAndEarn(int[] nums) {//核心思路://由于我们获得 nums[i] 的点数之后,就必须删除所有等于 nums[i] - 1 和 nums[i] 1 的元素//假设…...

算法通关村十三关-青铜:数字与数学基础问题
1.数字统计专题 统计特定场景下的符号或数字个数等 1.1符号统计 LeetCode1822 数组元素积的符号 https://leetcode.cn/problems/sign-of-the-product-of-an-array/description/ 思路分析 如果将所有的数都乘起来,再判断正负,工作量大,还…...

猜拳游戏小程序源码 大转盘积分游戏小程序源码 积分游戏小程序源码
简介: 猜拳游戏大转盘积分游戏小程序前端模板源码,一共五个静态页面,首页、任务列表、大转盘和猜拳等五个页面 图片:...

【Python】爬虫练习-爬取豆瓣网电影评论用户的观影习惯数据
目录 前言 一、配置环境 1.1、 安装Python 1.2、 安装Requests库和BeautifulSoup库 1.3.、安装Matplotlib 二、登录豆瓣网(重点) 2.1、获取代理 2.2、测试代理ip是否可用 2.3、设置大量请求头随机使用 2.4、登录豆瓣网 三、爬取某一部热门电影…...

webpack基础配置【总结】
webpack打包原理: webpack是一个js应用程序的静态模块打包工具,当webpack处理应用程序时,它的内部构建一个依赖图,此时依赖会映射项目中所需的每个模块,并生成一个或多个bundle包。因此我们会安装配置各种打包规则&…...

SharpCompress实战:一个方法搞定C#里ZIP压缩打包,附赠RAR/7Z解压和TAR.GZ创建教程
C#压缩解压全能手册:用SharpCompress玩转ZIP/RAR/7Z/TAR.GZ 在开发日志管理系统、文件上传模块或数据备份工具时,文件压缩解压功能就像空气一样不可或缺。但面对ZIP、RAR、7Z、TAR.GZ这些格式各异的压缩包,不少开发者都会陷入API选择的困境。…...

终极指南:如何使用AntiDupl.NET快速清理重复图片,释放硬盘空间
终极指南:如何使用AntiDupl.NET快速清理重复图片,释放硬盘空间 【免费下载链接】AntiDupl A program to search similar and defect pictures on the disk 项目地址: https://gitcode.com/gh_mirrors/an/AntiDupl 你是否曾因电脑中堆积如山的重复…...

体验Taotoken多模型路由带来的高稳定性与低延迟感受
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 体验Taotoken多模型路由带来的高稳定性与低延迟感受 1. 引言:开发中的稳定性与延迟挑战 在将大模型能力集成到应用的过…...

拯救者工具箱:从系统瓶颈到性能释放的全面硬件控制方案
拯救者工具箱:从系统瓶颈到性能释放的全面硬件控制方案 【免费下载链接】LenovoLegionToolkit Lightweight Lenovo Vantage and Hotkeys replacement for Lenovo Legion laptops. 项目地址: https://gitcode.com/gh_mirrors/le/LenovoLegionToolkit 当你手握…...

TC2526 低功耗原边反馈开关电源芯片
概述 TC2526 是一款低功耗原边反馈(PSR)开关电源芯片,其内部集成了大功率 BJT 管,适用于隔离型的高效低功耗便携式设备充电器应用。TC2526 采用独特具有恒流恒压功能的原边反馈控制技术,以及独特的轻载调频技术降低轻载…...

点云配准避坑指南:从理论到代码,详解点到面ICP中法线计算的‘坑’与线性近似的前提
点云配准实战:深入解析点到面ICP算法中的法线计算与线性近似陷阱 在三维重建和机器人定位领域,点云配准技术扮演着关键角色。当我们面对两个部分重叠的点云数据集时,如何精确地将它们对齐成为一个统一坐标系下的完整模型?迭代最近…...

QMC音频解密技术深度解析:算法实现与性能优化
QMC音频解密技术深度解析:算法实现与性能优化 【免费下载链接】qmc-decoder Fastest & best convert qmc 2 mp3 | flac tools 项目地址: https://gitcode.com/gh_mirrors/qm/qmc-decoder QMC音频解密工具是一款专注于QQ音乐加密格式解密的开源解决方案&a…...

独立开发者如何借助Taotoken多模型能力优化个人项目成本
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 独立开发者如何借助Taotoken多模型能力优化个人项目成本 对于独立开发者和小型项目而言,在探索大模型应用时࿰…...
)
Labelme版本不兼容报错?手把手教你修改源码和JSON文件(附3.18.0与4.5.6对比)
Labelme版本兼容性实战:从源码修改到JSON批量处理的完整指南 当你正专注于一个重要的数据标注项目,突然遭遇"Error opening file lineColor"的红色报错框,整个团队的标注进度被迫停滞——这种场景对于使用Labelme进行图像标注的开发…...

3步高效下载抖音无水印视频:douyin_downloader专业解决方案完整指南
3步高效下载抖音无水印视频:douyin_downloader专业解决方案完整指南 【免费下载链接】douyin_downloader 抖音短视频无水印下载 win编译版本下载:https://www.lanzous.com/i9za5od 项目地址: https://gitcode.com/gh_mirrors/dou/douyin_downloader …...