【精读Uboot】SPL阶段的board_init_r详细分析
对于i.MX平台上的SPL来说,其不会直接跳转到Uboot,而是在SPL阶段借助BOOTROM跳转到ATF,然后再通过ATF跳转到Uboot。
board_init_f会初始化设备相关的硬件,最后进入board_init_r为镜像跳转做准备。下面是board_init_r调用的核心函数流程,接下来我们会对其中的函数进行详细分析。
spl_board_init //board/freescale/imx93_evk/spl.c
board_boot_order(spl_boot_list)//spl_boot_device获取SPL启动设备 arch/arm/mach-imx/imx8/cpu.c
spl_boot_device//arch/arm/mach-imx/spl.c->spl_board_boot_device//board/freescale/imx93_evk/spl.c
spl_return_to_bootrom
board_return_to_bootrom//arch/arm/mach-imx/spl_imx_romapi.c
1、spl_board_init
对于i.MX93芯片来说,spl_board_init启动ELE了引擎。这里不对ELE进行详细分析。
//board/freescale/imx93_evk/spl.c
void spl_board_init(void)
{int ret;puts("Normal Boot\n");ret = ahab_start_rng();if (ret)printf("Fail to start RNG: %d\n", ret);
}
2、board_boot_order
spl_boot_device根据boot配置获取当前的启动设备。对于使用SCU的芯片需要特殊处理BOOT_DEVICE_SPI类型的设备。
//arch/arm/mach-imx/imx8/cpu.c,适用于93
void board_boot_order(u32 *spl_boot_list)
{spl_boot_list[0] = spl_boot_device();if (spl_boot_list[0] == BOOT_DEVICE_SPI) {/* Check whether we own the flexspi0, if not, use NOR boot */if (!sc_rm_is_resource_owned(-1, SC_R_FSPI_0))spl_boot_list[0] = BOOT_DEVICE_NOR;}
}
从spl_board_boot_device函数内容可以看出,i.MX8以及i.MX9系列芯片的SPL跳转皆是由BOOTROM辅助实现的,因为这里直接返回了BOOT_DEVICE_BOOTROM。
//arch/arm/mach-imx/spl.c
u32 spl_boot_device(void)
{enum boot_device boot_device_spl = get_boot_device();return spl_board_boot_device(boot_device_spl);
}int spl_board_boot_device(enum boot_device boot_dev_spl)
{
#ifdef CONFIG_SPL_BOOTROM_SUPPORTreturn BOOT_DEVICE_BOOTROM;
#elseswitch (boot_dev_spl) {case SD1_BOOT:case MMC1_BOOT:return BOOT_DEVICE_MMC1;case SD2_BOOT:case MMC2_BOOT:return BOOT_DEVICE_MMC2;default:return BOOT_DEVICE_NONE;}
#endif
}3、spl_return_to_bootrom
由于上面返回的boot设备是BOOT_DEVICE_BOOTROM,因此这里各家定义的board_return_to_bootrom用于辅助跳转。
通过ROM API查询当前的启动设备和启动阶段,启动阶段可以分为Primary boot,Secondary boot,Recovery boot和USB boot,打印对应的启动阶段信息,最后使用ROM API将Uboot搬运到DDR的对应位置。
int board_return_to_bootrom(struct spl_image_info *spl_image,struct spl_boot_device *bootdev)
{volatile gd_t *pgd = gd;int ret;u32 boot, bstage;ret = g_rom_api->query_boot_infor(QUERY_BT_DEV, &boot,((uintptr_t)&boot) ^ QUERY_BT_DEV);ret |= g_rom_api->query_boot_infor(QUERY_BT_STAGE, &bstage,((uintptr_t)&bstage) ^ QUERY_BT_STAGE);set_gd(pgd);if (ret != ROM_API_OKAY) {puts("ROMAPI: failure at query_boot_info\n");return -1;}printf("Boot Stage: ");switch (bstage) {case BT_STAGE_PRIMARY:printf("Primary boot\n");break;case BT_STAGE_SECONDARY:printf("Secondary boot\n");break;case BT_STAGE_RECOVERY:printf("Recovery boot\n");break;case BT_STAGE_USB:printf("USB boot\n");break;default:printf("Unknow (0x%x)\n", bstage);}//USB下载模式if (is_boot_from_stream_device(boot))return spl_romapi_load_image_stream(spl_image, bootdev);return spl_romapi_load_image_seekable(spl_image, bootdev, boot);
}
4、spl_romapi_load_image_seekable
下面我们将分析ROM API是如何将Uboot搬运到指定位置的。
-
通过
query_boot_infor查询IVT的偏移量、pagesize和image_offset。 -
获取header的位置
header = (struct image_header *)(CONFIG_SPL_IMX_ROMAPI_LOADADDR);//0x48000000 内存地址 -
获取Uboot在MMC介质中的偏移量,将其存储在offset(0x41400)中。
offset = spl_romapi_get_uboot_base(image_offset, rom_bt_dev);ulong spl_romapi_get_uboot_base(u32 image_offset, u32 rom_bt_dev) {ulong end;image_offset = spl_arch_boot_image_offset(image_offset, rom_bt_dev);end = get_imageset_end((void *)(ulong)image_offset, ROM_API_DEV);end = ROUND(end, SZ_1K);printf("Load image from 0x%lx by ROM_API\n", end);return end; } -
使用
download_image函数从MMC中的0x41400处下载header信息到DDR中的0x48000000处,后续需要对header里的信息进行判断(image_get_magic(header) == FDT_MAGIC)。这个header由mkimage_imx8.c写入。g_rom_api->download_image((u8 *)header, offset, size,((uintptr_t)header) ^ offset ^ size); -
设置其他固件的信息,对于93/8ulp来说调用的是
spl_load_imx_container函数,其余芯片为spl_load_simple_fit函数。spl_load_simple_fit这个函数会解析itb文件,获取里面的配置信息,填充spl_image_info和spl_load_info中的信息,加载ATF做好跳转之前的准备。
5、spl_load_simple_fit
在进入之前,设置了load.read为spl_romapi_read_seekable,然后spl_simple_fit_read会调用传入的read函数和上一节而最后读取到内存的header读取整个fit固件。这个是后续读取固件的核心函数。
if (IS_ENABLED(CONFIG_SPL_LOAD_FIT) && image_get_magic(header) == FDT_MAGIC) {struct spl_load_info load;memset(&load, 0, sizeof(load));load.bl_len = pagesize;load.read = spl_romapi_read_seekable;load.priv = &pagesize;return spl_load_simple_fit(spl_image, &load, offset / pagesize, header);
}
spl_load_simple_fit_fix_load使用ROM API读取itb到内存中,然后解析/configurations节点,其中的default配置名称和images的偏移量。
5.1、解析uboot
解析默认config(config-1)下面的firmware所指向的名称,这里解析出"uboot-1",然后返回出这个uboot节点在itb文件中的偏移量。一个config只有一个firmware,可以是uboot也可以是kernel,其余均为external数据。
spl_load_fit_image根据解析出的加载地址,将u-boot-nodtb.bin放到加载地址处。然后填充spl_image_info中的load_addr等信息。
#define FIT_FIRMWARE_PROP "firmware"
node = spl_fit_get_image_node(&ctx, FIT_FIRMWARE_PROP, 0);ret = spl_load_fit_image(info, sector, &ctx, node, spl_image);
5.2、解析fdt
spl_fit_append_fdt首先也是解析出its中关于设备树的相关信息,然后使用fdt_overlay_apply_verbose->fdt_overlay_apply将its中需要overlay的部分覆盖进原始dtb中。
if (os_takes_devicetree(spl_image->os)) {ret = spl_fit_append_fdt(spl_image, info, sector, &ctx);
}
overlay dtb格式1:
/dts-v1/;
/plugin/;/ {fragment@0 {target-path = "/";__overlay__ {/*在此添加要插入的节点*/.......};};fragment@1 {target = <&XXXXX>;__overlay__ {/*在此添加要插入的节点*/.......};};.......};
overlay dtb格式2:
/dts-v1/;
/plugin/;&{/} {/*此处在根节点"/"下,添加要插入的节点或者属性*/
};&XXXXX {/*此处在节点"XXXXX"下,添加要插入的节点或者属性*/
};
5.3、解析loadables
和解析加载uboot类似,先找到its节点中的信息,然后根据这些信息将atf和tee放到指定位置。
for (; ; index++) {uint8_t os_type = IH_OS_INVALID;node = spl_fit_get_image_node(&ctx, "loadables", index);image_info.load_addr = 0;ret = spl_load_fit_image(info, sector, &ctx, node, &image_info);/* Record our loadables into the FDT */if (spl_image->fdt_addr)spl_fit_record_loadable(&ctx, index,spl_image->fdt_addr,&image_info);}
如果firmware属性中未定义entry值,那么将第一个loadables的entry作为跳转入口(spl_image->entry_point)。从its中我们可以知道,第一个loadables就是atf。
6、跳转至ATF
直接跳转进spl_image->entry_point所定义的地址,也就是进入ATF中。
arch/arm/mach-imx/spl.c
/** +------------+ 0x0 (DDR_UIMAGE_START) -* | Header | |* +------------+ 0x40 |* | | |* | | |* | | |* | | |* | Image Data | |* . | |* . | > Stuff to be authenticated ----+* . | | |* | | | |* | | | |* +------------+ | |* | | | |* | Fill Data | | |* | | | |* +------------+ Align to ALIGN_SIZE | |* | IVT | | |* +------------+ + IVT_SIZE - |* | | |* | CSF DATA | <---------------------------------------------------------+* | |* +------------+* | |* | Fill Data |* | |* +------------+ + CSF_PAD_SIZE*/__weak void __noreturn jump_to_image_no_args(struct spl_image_info *spl_image)
{typedef void __noreturn (*image_entry_noargs_t)(void);uint32_t offset;image_entry_noargs_t image_entry =(image_entry_noargs_t)(unsigned long)spl_image->entry_point;debug("image entry point: 0x%lX\n", spl_image->entry_point);if (spl_image->flags & SPL_FIT_FOUND) {image_entry();} else {/** HAB looks for the CSF at the end of the authenticated* data therefore, we need to subtract the size of the* CSF from the actual filesize*/offset = spl_image->size - CONFIG_CSF_SIZE;if (!imx_hab_authenticate_image(spl_image->load_addr,offset + IVT_SIZE +CSF_PAD_SIZE, offset)) {image_entry();} else {panic("spl: ERROR: image authentication fail\n");}}
}
附录1:its表
/dts-v1/;/ {description = "Configuration to load ATF before U-Boot";#address-cells = <1>;images {uboot-1 {description = "U-Boot (64-bit)";data = /incbin/("u-boot-nodtb.bin");type = "standalone";arch = "arm64";compression = "none";load = <0x40200000>;};fdt-1 {description = "evk";data = /incbin/("evk.dtb");type = "flat_dt";compression = "none";};atf-1 {description = "ARM Trusted Firmware";data = /incbin/("bl31.bin");type = "firmware";arch = "arm64";compression = "none";load = <0x00970000>;entry = <0x00970000>;};tee-1 {description = "TEE firmware";data = /incbin/("tee.bin");type = "firmware";arch = "arm64";compression = "none";load = <0x56000000>;entry = <0x56000000>;};};configurations {default = "config-1";config-1 {description = "evk";firmware = "uboot-1";loadables = "atf-1", "tee-1";fdt = "fdt-1";};};
};附录2:启动log
i.MX93
U-Boot SPL 2022.04-lf_v2022.04+g1734965341 (Jun 30 2023 - 10:23:49 +0000)
SOC: 0xa0009300
LC: 0x40010
M33 prepare ok
>>SPL: board_init_r()
spl_init
Normal Boot
Trying to boot from BOOTROM
Boot Stage: Primary boot
image offset 0x0, pagesize 0x200, ivt offset 0x0
Load image from 0x41400 by ROM_API
Unsupported OS image.. Jumping nevertheless..
image entry point: 0x204e0000
i.MX8MP
U-Boot SPL 2023.04-lf_v2023.04+gaf7d004eaf (Aug 14 2023 - 03:48:45 +0000)
DDRINFO: start DRAM init
DDRINFO: DRAM rate 4000MTS
DDRINFO:ddrphy calibration done
DDRINFO: ddrmix config done
>>SPL: board_init_r()
spl_init
SEC0: RNG instantiated
Normal Boot
Trying to boot from BOOTROM
Boot Stage: Primary boot
image offset 0x0, pagesize 0x200, ivt offset 0x0
Jumping to U-Boot...
image entry point: 0x970000
相关文章:

【精读Uboot】SPL阶段的board_init_r详细分析
对于i.MX平台上的SPL来说,其不会直接跳转到Uboot,而是在SPL阶段借助BOOTROM跳转到ATF,然后再通过ATF跳转到Uboot。 board_init_f会初始化设备相关的硬件,最后进入board_init_r为镜像跳转做准备。下面是board_init_r调用的核心函数…...
canvas绘制渐变色三角形金字塔
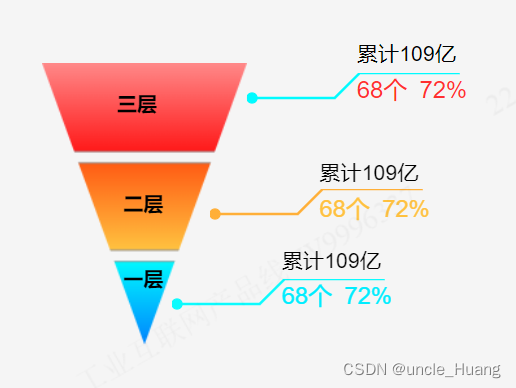
项目需求:需要绘制渐变色三角形金字塔,并用折线添加标识 (其实所有直接用图片放上去也行,但是ui没切图,我也懒得找她要,正好也没啥事,直接自己用代码绘制算了,总结一句就是闲的) 最终效果如下图: (以上没用任何图片,都是代码绘制的) 在网上找了,有用canvas绘…...
企业电子招标采购系统源码Spring Boot + Mybatis + Redis + Layui + 前后端分离 构建企业电子招采平台之立项流程图
功能模块: 待办消息,招标公告,中标公告,信息发布 描述: 全过程数字化采购管理,打造从供应商管理到采购招投标、采购合同、采购执行的全过程数字化管理。通供应商门户具备内外协同的能力,为外部供…...

Debain JDK8 安装
Debain JDK8 安装 首先请安装依赖: sudo apt-get update && sudo apt-get install -y wget apt-transport-https然后信任 GPG 公钥: wget -O - https://packages.adoptium.net/artifactory/api/gpg/key/public | sudo tee /etc/apt/keyrings/…...

Python序列操作指南:列表、字符串和元组的基本用法和操作
文章目录 序列列表创建列表访问元素修改元素添加和删除元素 range()字符串创建字符串访问字符字符串切片修改字符串 元组创建元组访问元素获取元素数量元组的特点: 可变对象改变对象的值改变变量的指向比较运算符总结 python精品专栏推荐python基础知识(…...

【已更新代码图表】2023数学建模国赛E题python代码--黄河水沙监测数据分析
E 题 黄河水沙监测数据分析 黄河是中华民族的母亲河。研究黄河水沙通量的变化规律对沿黄流域的环境治理、气候变 化和人民生活的影响,以及对优化黄河流域水资源分配、协调人地关系、调水调沙、防洪减灾 等方面都具有重要的理论指导意义。 附件 1 给出了位于小浪底水…...

【前端】CSS-Grid网格布局
目录 一、grid布局是什么二、grid布局的属性三、容器属性1、display①、语句②、属性值 2、grid-template-columns属性、grid-template-rows属性①、定义②、属性值1)、固定的列宽和行高2)、repeat()函数3)、auto-fill关键字4)、f…...

计算机竞赛 基于深度学习的动物识别 - 卷积神经网络 机器视觉 图像识别
文章目录 0 前言1 背景2 算法原理2.1 动物识别方法概况2.2 常用的网络模型2.2.1 B-CNN2.2.2 SSD 3 SSD动物目标检测流程4 实现效果5 部分相关代码5.1 数据预处理5.2 构建卷积神经网络5.3 tensorflow计算图可视化5.4 网络模型训练5.5 对猫狗图像进行2分类 6 最后 0 前言 &#…...
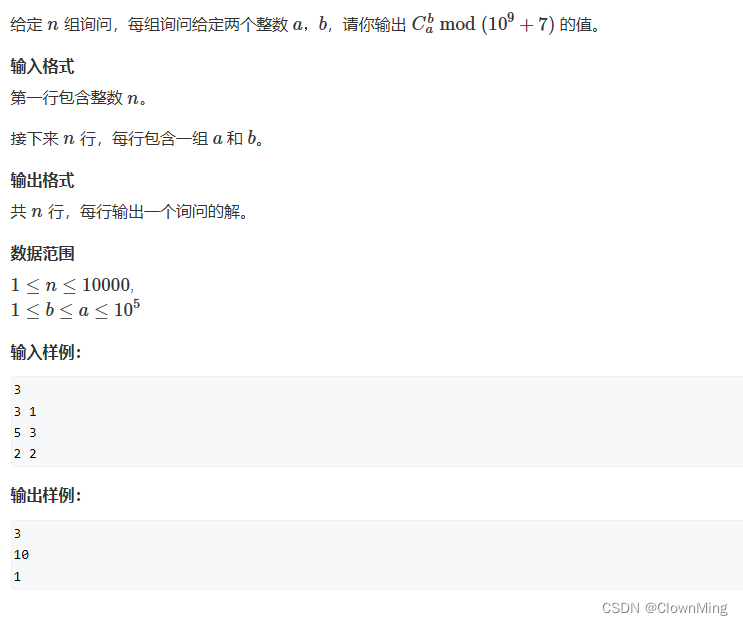
2023-9-8 求组合数(二)
题目链接:求组合数 II #include <iostream> #include <algorithm>using namespace std;typedef long long LL; const int mod 1e9 7; const int N 100010;// 阶乘,阶乘的逆 int fact[N], infact[N];LL qmi(int a, int k, int p) {int res…...

k8s service的一些特性
文章目录 Service分发负载的策略同一端口通过不同协议暴露Headless Service的负载分发策略 Service分发负载的策略 大家都知道,一个service可以对应多个pod,那么一定要有一些方法来把service接收到的请求(负载)转发到pod上。 一般…...

C++中std::enable_if和SFINAE介绍
作为一个标准的C++模板类,我们先看下enable_if的定义: // STRUCT TEMPLATE enable_if template <bool _Test, class _Ty = void> struct enable_if {}; // no member "type" when !_Testtemplate <class _Ty> struct enable_if<true, _Ty> { //…...
华为OD机考算法题:数字加减游戏
目录 题目部分 解读与分析 代码实现 题目部分 题目数字加减游戏难度难题目说明小明在玩一个数字加减游戏,只使用加法或者减法,将一个数字 s 变成数字 t 。 每个回合,小明可以用当前的数字加上或减去一个数字。 现在有两种数字可以用来加减…...

WPF命令
在设计良好的Windows应用程序中,应用程序逻辑不应位于事件处理程序中,而应在更高层的方法中编写代码。其中的每个方法都代表单独的应用程序任务。每个任务可能依赖其他库。 使用这种设计最明显的方式是在需要的地方添加事件处理程序,并使用各…...
Unity中Shader的屏幕抓取 GrabPass
文章目录 前言一、抓取1、抓取指令2、在使用抓取的屏幕前,需要像使用属性一样定义一下,_GrabTexture这个名字是Unity定义好的 前言 Unity中Shader的屏幕抓取 GrabPass 一、抓取 1、抓取指令 屏幕的抓取需要使用一个Pass GrabPass{} GrabPass{“NAME”} 2、在使用…...
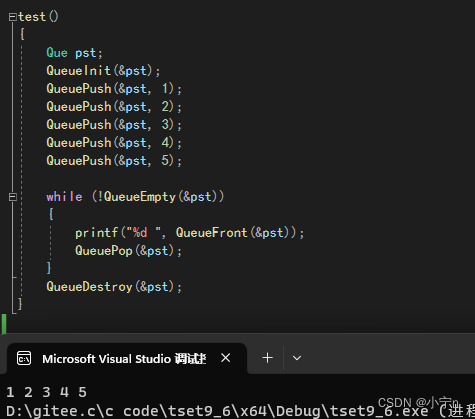
手撕 队列
队列的基本概念 只允许在一端进行插入数据操作,在另一端进行删除数据操作的特殊线性表,队列具有先进先出 入队列:进行插入操作的一端称为队尾 出队列:进行删除操作的一端称为队头 队列用链表实现 队列的实现 队列的定义 队列…...
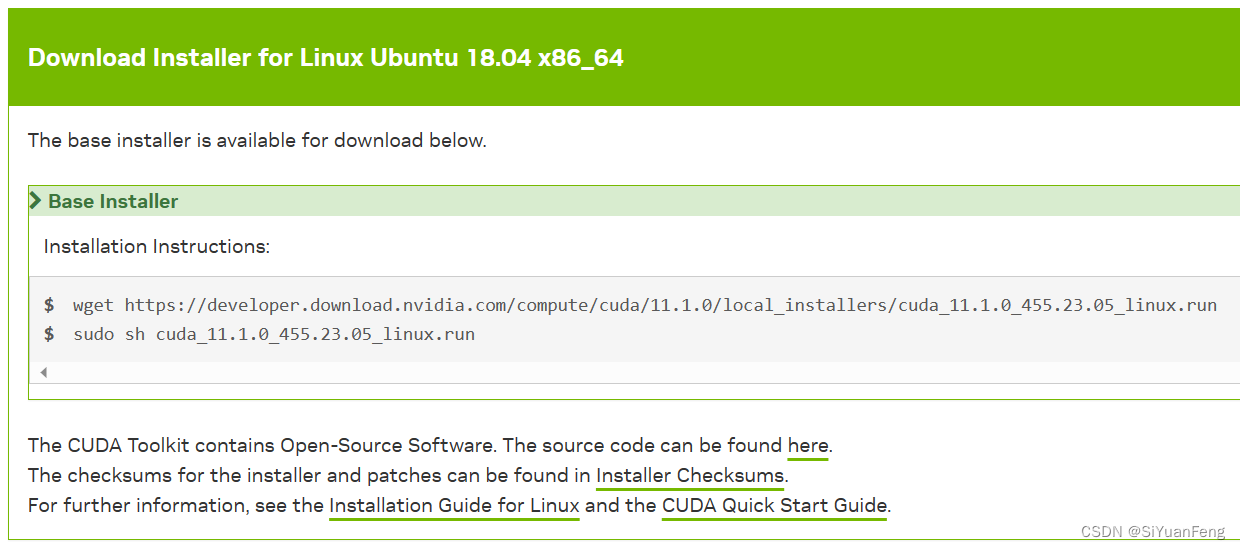
【autodl/linux配环境心得:conda/本地配cuda,cudnn及pytorch心得】-未完成
linux配环境心得:conda/本地配cuda,cudnn及pytorch心得 我们服务器遇到的大多数找不到包的问题一,服务器安装cuda和cudnn使用conda在线安装cuda和cudnn使用conda进行本地安装检查conda安装的cuda和cudnn本地直接安装cuda和cudnn方法一&#x…...

macOS Ventura 13.5.2(22G91)发布,附黑/白苹果镜像下载地址
系统介绍(下载请百度搜索:黑果魏叔) 黑果魏叔 9 月 8 日消息,苹果今日向 Mac 电脑用户推送了 macOS 13.5.2 更新(内部版本号:22G91),本次更新距离上次发布隔了 21 天。 本次更新查…...

vue 子组件向父组件传递参数 子传父
子组件中写: this.$emit(RowCount,res.data.RowCount); 父组件中写: getMFGLRowCount(val){ //父组件中的方法: 接收子组件传过来的参数值赋值给父组件的变量 //this.totalCount val; alert("这…...
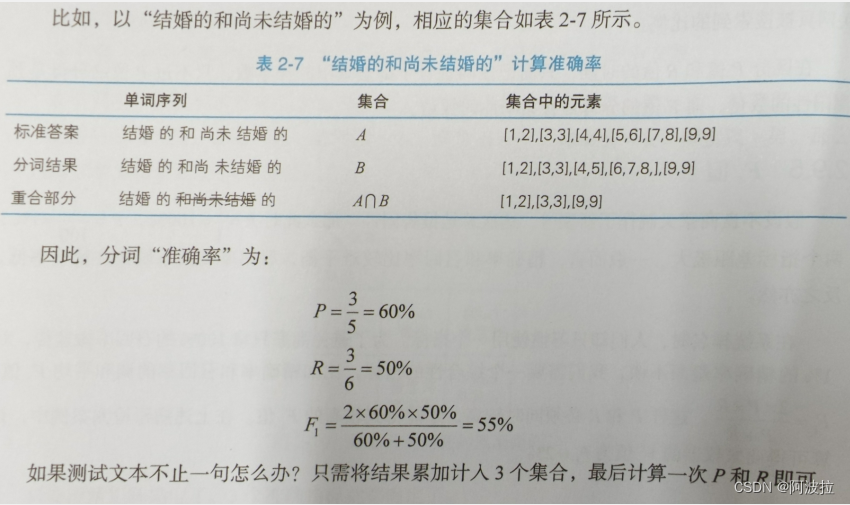
自然语言处理学习笔记(八)———— 准确率
目录 1.准确率定义 2.混淆矩阵与TP/FN/FP/TN 3. 精确率 4.召回率 5.F1值 6.中文分词的P、R、F1计算 7.实现 1.准确率定义 准确率是用来衡量一个系统的准确程度的值,可以理解为一系列评测指标。当预测与答案的数量相等时,准确率指的是系统做出正确判…...
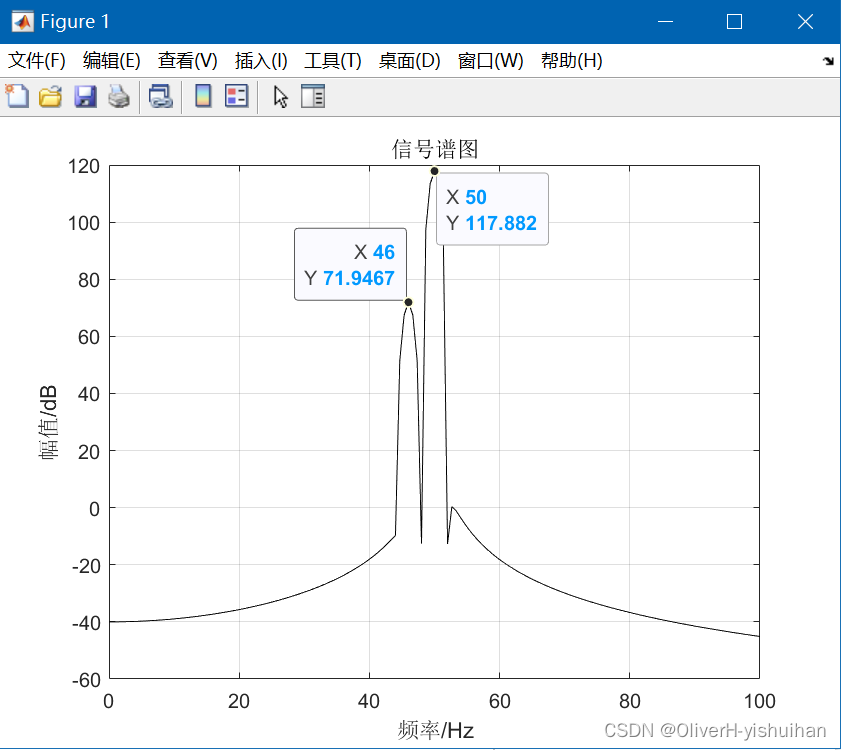
Matlab 如何选择窗函数和 FFT 的长度
Matlab 如何选择窗函数和 FFT 的长度 1、常用的四种窗函数 对于实际信号序列,如何选取窗函数呢?一般来说,选择第一旁瓣衰减大,旁瓣峰值衰减快的窗函数有利于緩解截断过程中产生的頻泄漏问题。但具有这两个特性的窗函数࿰…...

OpenSpeedy游戏变速工具实战指南:打破帧率限制的完整攻略
OpenSpeedy游戏变速工具实战指南:打破帧率限制的完整攻略 【免费下载链接】OpenSpeedy 🎮 An open-source game speed modifier. 项目地址: https://gitcode.com/gh_mirrors/op/OpenSpeedy OpenSpeedy是一款开源免费的游戏变速工具,能…...

Qwen3.5-2B保姆级教程:20亿参数模型端侧部署与图文对话实操
Qwen3.5-2B保姆级教程:20亿参数模型端侧部署与图文对话实操 1. 模型简介 Qwen3.5-2B是阿里云推出的轻量化多模态基础模型,属于Qwen3.5系列的小参数版本(20亿参数)。这个模型专为低功耗、低门槛部署场景设计,特别适合在端侧和边缘设备上运行…...

2026年03月总结及随笔之又双叒叕漏更
1. 回头看日更坚持了1186天。读《人工智能全球格局:未来趋势与中国位势》更新完成读《2025世界前沿技术发展报告》开更并持续更新中2023年至2025年12月底累计码字3054280字,累计日均码字2786字。2023年至2026年03月底累计码字3334223字,累计日…...

RK3588与RK3399 USB DTS配置对比:升级平台时如何快速迁移和避坑
RK3588与RK3399 USB DTS配置深度对比:迁移实战指南 从RK3399升级到RK3588平台的开发者,往往会在USB功能配置上遇到意料之外的挑战。两代芯片虽然同属Rockchip产品线,但在USB架构设计、DTS节点定义和电源管理策略上存在显著差异。本文将带您深…...

智能信道建模实战指南:从技术选型到落地实施的决策框架
智能信道建模实战指南:从技术选型到落地实施的决策框架 【免费下载链接】DeepMIMO-matlab DeepMIMO dataset and codes for mmWave and massive MIMO applications 项目地址: https://gitcode.com/gh_mirrors/de/DeepMIMO-matlab 在5G向6G演进的过程中&#…...

为什么Snap卸载Docker总卡在快照?揭秘自动备份机制与3种强制中断方案
为什么Snap卸载Docker总卡在快照?深度解析与实战解决方案 当你尝试卸载通过Snap安装的Docker时,是否遇到过进度条卡在"Save data of snap docker in automatic snapshot set #3"的情况?这种看似简单的卸载操作背后,隐藏…...
实践:让模型记住新知识而不遗忘)
CoPaw持续学习(Continual Learning)实践:让模型记住新知识而不遗忘
CoPaw持续学习(Continual Learning)实践:让模型记住新知识而不遗忘 1. 为什么需要持续学习? 想象一下,你教会了一只小狗坐下和握手的指令。但当你开始教它新的技能"装死"时,它却完全忘记了之前…...

OpenClaw定时任务:千问3.5-9B实现每日自动化流程
OpenClaw定时任务:千问3.5-9B实现每日自动化流程 1. 为什么需要定时任务自动化 去年冬天的一个深夜,我正熬夜准备第二天的重要汇报材料,突然发现需要从三个不同平台导出数据并整理成统一格式。手动操作到凌晨两点时,我意识到这种…...

公司SEO推广有哪些常见的误区需要避免
公司SEO推广有哪些常见的误区需要避免 在数字化营销的时代,公司SEO推广已经成为提升网站流量和品牌知名度的重要手段。在实际操作中,许多企业在SEO推广过程中常常犯下一些常见的误区,这些误区不仅影响了SEO的效果,还可能导致资源…...

OpenClaw日志分析:千问3.5-35B-A3B-FP8任务执行问题定位
OpenClaw日志分析:千问3.5-35B-A3B-FP8任务执行问题定位 1. 问题背景与日志分析的价值 上周我在尝试用OpenClaw自动化处理一批技术文档时,遇到了任务频繁中断的问题。当时对接的是千问3.5-35B-A3B-FP8模型,系统提示"模型响应异常"…...