毫米波雷达 TI IWR1443 在 ROS 中进行 octomap 建图
个人实验记录
/mmwave_ti_ros/ros_driver/src/ti_mmwave_rospkg/launch/1443_multi_3d_0.launch
<launch><!-- Input arguments --><arg name="device" value="1443" doc="TI mmWave sensor device type [1443, 1642]"/><arg name="config" value="3d" doc="TI mmWave sensor device configuration [3d_best_range_res (not supported by 1642 EVM), 2d_best_range_res]"/><arg name="max_allowed_elevation_angle_deg" default="90" doc="Maximum allowed elevation angle in degrees for detected object data [0 > value >= 90]}"/><arg name="max_allowed_azimuth_angle_deg" default="90" doc="Maximum allowed azimuth angle in degrees for detected object data [0 > value >= 90]}"/><!-- mmWave_Manager node --><node pkg="ti_mmwave_rospkg" type="ti_mmwave_rospkg" name="ti_mmwave" ns="radar_0" output="screen"><param name="command_port" value="/dev/ttyACM0" /><param name="command_rate" value="115200" /><param name="data_port" value="/dev/ttyACM1" /><param name="data_rate" value="921600" /><param name="max_allowed_elevation_angle_deg" value="$(arg max_allowed_elevation_angle_deg)" /><param name="max_allowed_azimuth_angle_deg" value="$(arg max_allowed_azimuth_angle_deg)" /><param name="frame_id" value="/ti_mmwave_0"/><param name="mmWaveCLI_name" value="/mmWaveCLI" /><remap from="/ti_mmwave/radar_scan_pcl" to="/ti_mmwave/radar_scan_pcl_0"/></node><!-- mmWaveQuickConfig node (terminates after configuring mmWave sensor) --><node pkg="ti_mmwave_rospkg" type="mmWaveQuickConfig" name="ti_mmwave_config" ns="radar_0" args="$(find ti_mmwave_rospkg)/cfg/1443_3d.cfg" output="screen" ><param name="mmWaveCLI_name" value="/mmWaveCLI" /></node><node pkg="tf" type="static_transform_publisher" name="base_to_radar" args="0 0 0 0 0 0 base_footprint ti_mmwave_0 100"/><!-- <node pkg="rviz" type="rviz" name="rviz" args="-d $(find ti_mmwave_rospkg)/launch/rviz/ti_mmwave_multi.rviz"/> -->
</launch>
点云输出话题:/ti_mmwave/radar_scan_pcl_0
/mmwave_ti_ros/robotics_ros/src/turtlebot_mmwave_launchers/launch/single_sensor/radar_limit_filters.launch
<!--Filters for the data from the radar-->
<launch><node pkg="nodelet" type="nodelet" name="pcl_manager" args="manager" output="screen"/><!-- x_filt 节点:这是一个名为 x_filt 的节点,用于加载一个点云滤波器,具体是 pcl/PassThrough。这个滤波器将用于过滤雷达数据中的 x 坐标。通过 <remap> 标签,将输入和输出话题进行重映射,以将数据传递给下一个滤波器。通过 <rosparam> 标签,设置了滤波器的参数,包括 filter_field_name(要过滤的字段名)、filter_limit_min(最小允许值)、filter_limit_max(最大允许值)、filter_limit_negative(是否允许负值)--><node pkg="nodelet" type="nodelet" name="x_filt" args="load pcl/PassThrough pcl_manager" output="screen"><!-- 将毫米波点云输入过滤器 --><remap from="~input" to="ti_mmwave/radar_scan_pcl_0" /><remap from="~output" to="x_filt_out" /><rosparam>filter_field_name: xfilter_limit_min: 0.1filter_limit_max: 4filter_limit_negative: False</rosparam></node><node pkg="nodelet" type="nodelet" name="y_filt" args="load pcl/PassThrough pcl_manager" output="screen"><remap from="~input" to="x_filt_out" /><remap from="~output" to="xy_filt_out" /><rosparam>filter_field_name: yfilter_limit_min: -3filter_limit_max: 3filter_limit_negative: False</rosparam></node><node pkg="nodelet" type="nodelet" name="z_filt" args="load pcl/PassThrough pcl_manager" output="screen"><remap from="~input" to="xy_filt_out" /><remap from="~output" to="xyz_filt_out" /><rosparam>filter_field_name: zfilter_limit_min: -0.4filter_limit_max: 0.10filter_limit_negative: False</rosparam></node><!-- 过滤强度 --><node pkg="nodelet" type="nodelet" name="i_filt" args="load pcl/PassThrough pcl_manager" output="screen"><remap from="~input" to="xyz_filt_out" /><remap from="~output" to="xyzi_filt_out" /><rosparam>filter_field_name: intensityfilter_limit_min: 8filter_limit_max: 100filter_limit_negative: False</rosparam></node></launch>点云输出话题:/xyzi_filt_out、/xyz_filt_out、/xy_filt_out、/x_filt_out
/mmwave_ti_ros/robotics_ros/src/turtlebot_mmwave_launchers/launch/single_sensor/radar_mapping.launch
<!--Launch file to perform mapping using octomap with the radar--><!--
运行 ROS 中的 octomap_server 软件包。
其中有几个过滤器可供使用: 用于所有点云字段的通过过滤器,以及用于过滤原始地图的统计离群点去除过滤器。
通过式过滤器:去除特定字段(X、Y、Z、强度)中超出一定范围的值
统计离群点去除:根据与其近邻的距离去除数值
这些过滤器的参数/限制可在 turtlebot_mmwave_launchers/launch/radar_limit_filters.launch 文件中找到并修改。
更改 radar_limit_filters.launch 文件后,必须重新启动 radar_mapping.launch 文件,以使新参数生效。
--><launch><!-- Publish static transform from map to odom for mapping using only odometry info --><node pkg="tf" type="static_transform_publisher" name="static_tf_map_to_odom" args="0 0 0 0 0 0 map odom 100"/><!-- Add nodes to filter/limit Radar data before using it for mapping --><!-- nodelet --><include file="$(find turtlebot_mmwave_launchers)/launch/single_sensor/radar_limit_filters.launch"></include><!-- Create "raw" 3D map using first octomap node --><node pkg="octomap_server" type="octomap_server_node" name="octomap_raw" output="screen" ><remap from="octomap_point_cloud_centers" to="raw_point_cloud_centers" /><remap from="projected_map" to="raw_map" /><param name="frame_id" type="string" value="/ti_mmwave_0" /><remap from="cloud_in" to="xyzi_filt_out" /></node><!-- Perform SOR filtering on output from "raw" octomap node --><node pkg="nodelet" type="nodelet" name="mapping_SOR_filt_mapping" args="standalone pcl/StatisticalOutlierRemoval" output="screen" ><remap from="~input" to="raw_point_cloud_centers" /><remap from="~output" to="mapping_SOR_filter_out" /><param name="mean_k" value="20" /><param name="stddev" value="0.04" /></node><!-- Create "filtered" 3D map using second octomap node --><node pkg="octomap_server" type="octomap_server_node" name="octomap_filtered" output="screen" ><remap from="octomap_point_cloud_centers" to="filtered_point_cloud_centers" /><remap from="projected_map" to="filtered_map" /><remap from="cloud_in" to="mapping_SOR_filter_out" /></node></launch>建图:
roslaunch ti_mmwave_rospkg 1443_multi_3d_0.launch
roslaunch turtelbot_mmwave_launchers radar_mapping.launch
rostopic list

rqt_graph
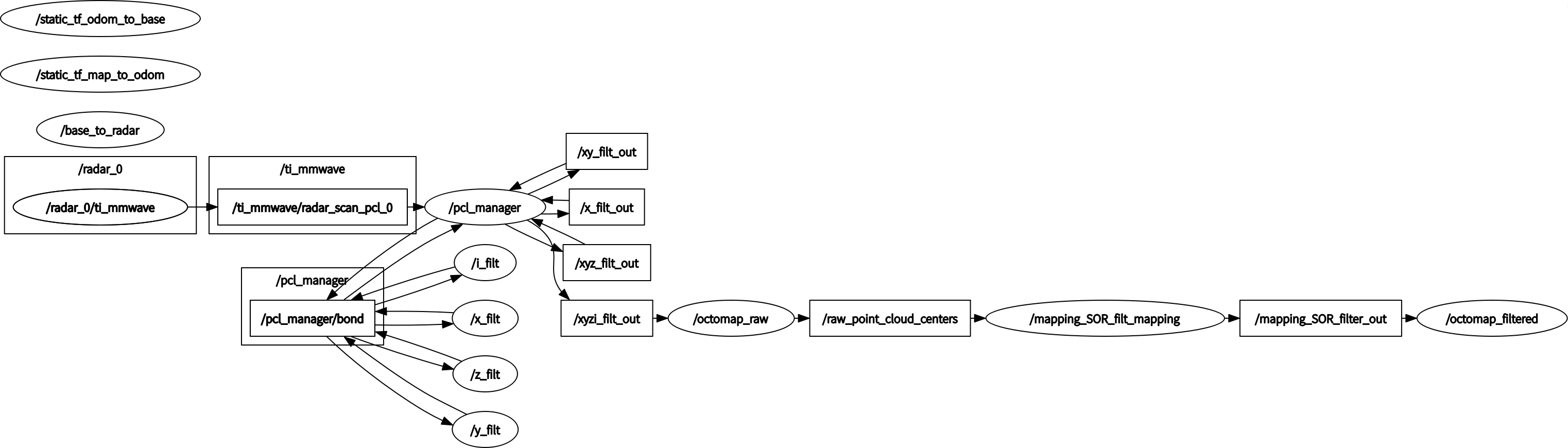
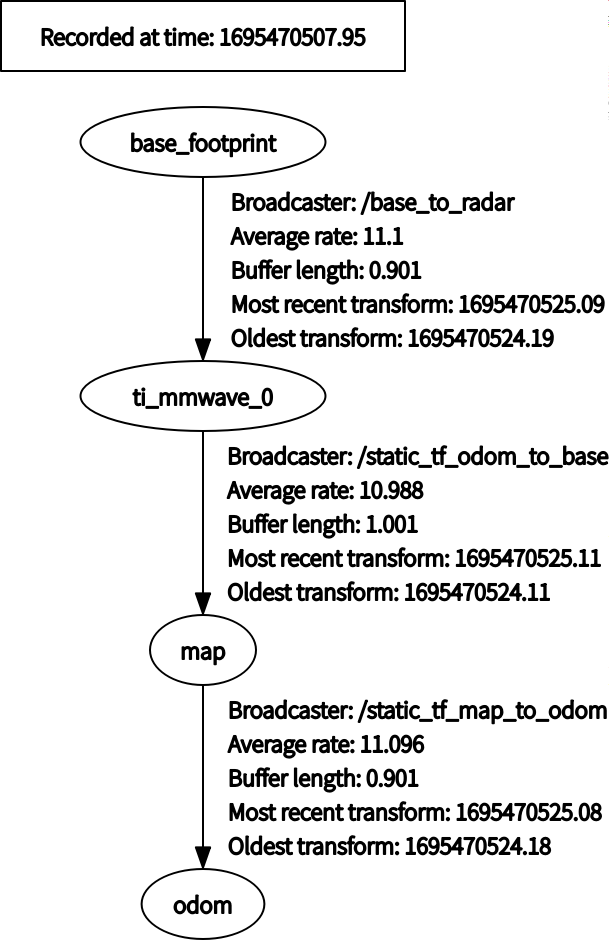
rosrun rqt_tf_tree rqt_tf_tree
相关文章:
毫米波雷达 TI IWR1443 在 ROS 中进行 octomap 建图
个人实验记录 /mmwave_ti_ros/ros_driver/src/ti_mmwave_rospkg/launch/1443_multi_3d_0.launch <launch><!-- Input arguments --><arg name"device" value"1443" doc"TI mmWave sensor device type [1443, 1642]"/><arg…...
113双周赛
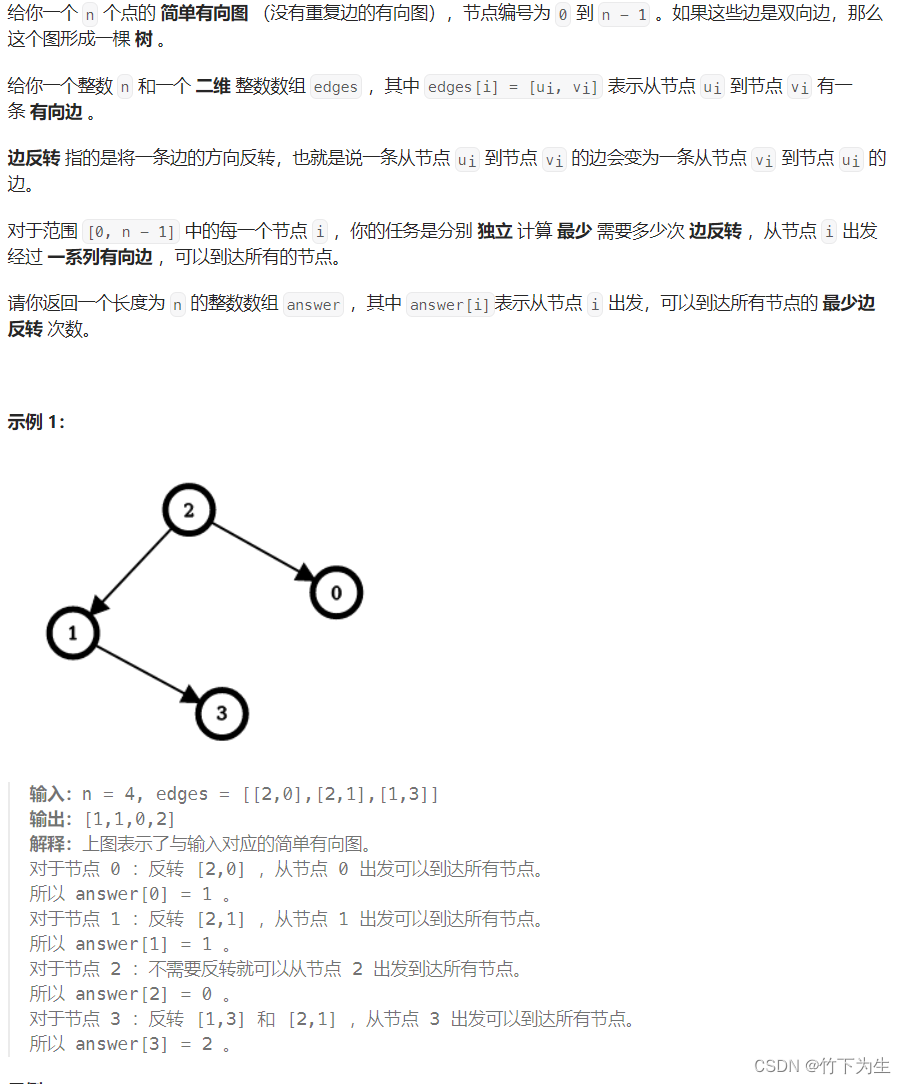
题目列表 2855. 使数组成为递增数组的最少右移次数 2856. 删除数对后的最小数组长度 2857. 统计距离为 k 的点对 2858. 可以到达每一个节点的最少边反转次数 一、使数组成为递增数组的最少右移次数 这题可以直接暴力求解,枚举出每种右移后的数组,将…...

React 全栈体系(九)
第五章 React 路由 一、相关理解 1. SPA 的理解 单页 Web 应用(single page web application,SPA)。整个应用只有一个完整的页面。点击页面中的链接不会刷新页面,只会做页面的局部更新。数据都需要通过 ajax 请求获取, 并在前端…...
阈值化分割,对灰度级图像进行二值化处理(数字图像处理大题复习 P8)
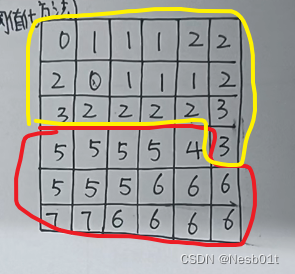
文章目录 画出表格求出灰度直方图 & 山谷画出结果图 画出表格 有几个0就写几,有几个1就写几,如图 求出灰度直方图 & 山谷 跟前面求灰度直方图的方法一样,找出谷底,发现结果为 4 画出结果图 最终的结果就是…...

vue3中withDefaults是什么
问: const props withDefaults(defineProps<{// 数据列表lotteryList: { pic: string; name?: string }[];// 中奖idwinId: number;// 抽奖初始转动速度initSpeed: number;// 抽奖最快转动速度fastSpeed: number;// 抽奖最慢转动速度slowSpeed: number;// 基本圈数baseCi…...
Android进阶之路 - 盈利、亏损金额格式化
在金融类型的app中,关于金额、数字都相对敏感和常见一些,在此仅记录我在金融行业期间学到的皮毛,如后续遇到新的场景也会加入该篇 该篇大多采用 Kotlin 扩展函数的方式进行记录,尽可能熟悉 Kotlin 基础知识 兄弟 Blog StringUti…...
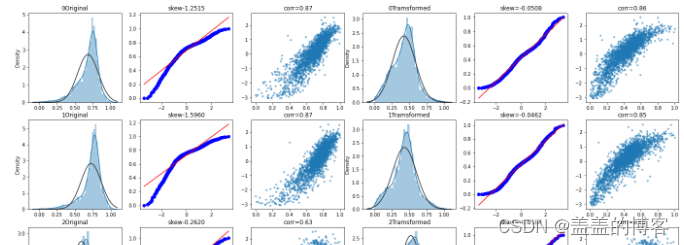
工业蒸汽量预测(速通一)
工业蒸汽量预测(一) 赛题理解1、评估指标2、赛题模型3、解题思路 理论知识1、变量识别2、变量分析3、缺失值处理4、异常值处理5、变量转换6、新变量生成 数据探索1、导包2、读取数据3、查看数据4、可视化数据分布4.1箱型图4.2获取异常数据并画图4.3直方图…...

机器学习的主要内容
分类任务 回归任务 有一些算法只能解决回归问题有一些算法只能解决分类问题有一些算法的思路既能解决回归问题,又能解决分类问题 一些情况下, 回归任务可以转化为分类任务, 比如我们预测学生的成绩,然后根据学生的成绩划分为A类、…...
)
华为OD机试真题-分积木-2023年OD统一考试(B卷)
题目描述: Solo和koko是两兄弟,妈妈给了他们一大堆积木,每块积木上都有自己的重量。现在他们想要将这些积木分成两堆。哥哥Solo负责分配,弟弟koko要求两个人获得的积木总重量“相等”(根据Koko的逻辑),个数可以不同,不然就会哭,但koko只会先将两个数转成二进制再进行加…...

SpringBoot自动装配原理及分析
一、什么是自动装配 在使用SpringBoot的时候,会自动将Bean装配到IoC容器中。例如我们在使用Redis数据库的时候,会引入依赖spring-boot-starter-data-redis。在引入这个依赖后,服务初始化的时候,会将操作Redis需要的组件注入到IoC…...
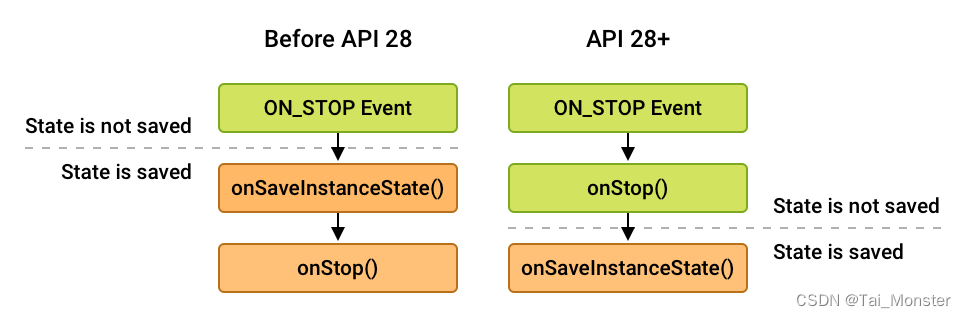
Android开发笔记 :理解Fragment
Android开发笔记:理解Fragment 导言 本篇文章产生的原因很简单,就是我在了解Android Jetpack中的Lifecycle框架时发现Lifecycle具体时间和状态的更新都是由一个名为ReportFragment的Fragment来跟踪的,为了更好的了解Fragment是如何追踪Activ…...

std::chrono获取当前秒级/毫秒级/微秒级/纳秒级时间戳
当前时间戳获取方法 先使用std::chrono获取当前系统时间,然后将当前系统时间转换为纪元时间std::time_t类型,之后使用std::localtime对std::time_t类型转换为本地时间结构体std::tm类型,最后使用strftime对时间进行格式化输出。 其中std::t…...

sh文件介绍及linux下执行
Shell脚本是一种用于自动化任务和系统管理的脚本语言。它允许用户通过命令行界面执行一系列命令,从而简化了重复性任务的处理过程。 以下是关于Shell脚本的一些基本概念: 1. Shell脚本通常以“.sh”扩展名保存,例如“script.sh”。 2. Shell…...

js-cookie使用 js深度克隆(判断引用类型是数组还是对象的方法)
cookie和深度拷贝的使用 1、js-cookie使用2、js深度克隆 1、js-cookie使用 前端的本地存储分为 localstorage、sesstionstorage、cookie 但是咱们有时候需要做7天免登录的需求时,选择 cookie 作为前端的本地存储是在合适不过的了 直接操作 cookie 可以, …...

[Pytorch]语义分割任务分类的实现
文章目录 [Pytorch]语义分割任务分类的实现 [Pytorch]语义分割任务分类的实现 假如我们定义了一个网络用于语义分割任务,这个网络简称为model() 语义分割任务要做的是: 对于一个图片输入input,大小为(B,C,…...
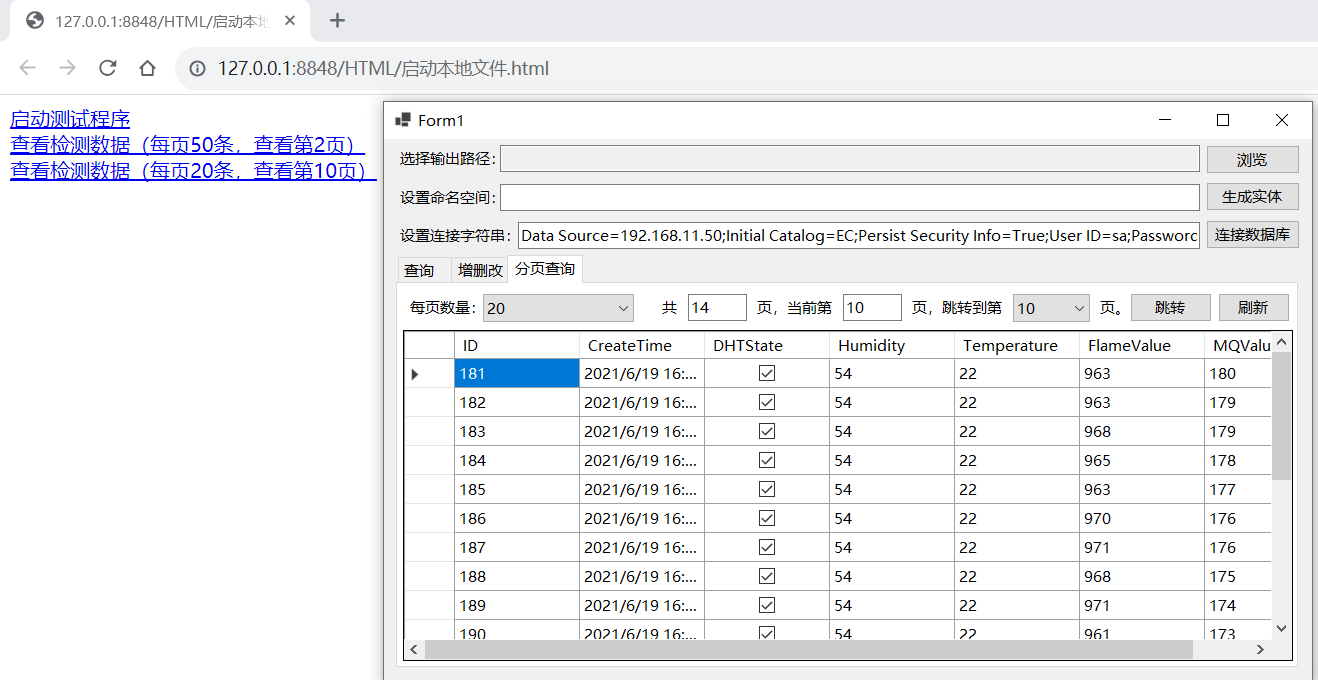
测试网页调用本地可执行程序(续:带参数调用)
前篇文章介绍了网页调用本地可执行程序的方式,通过在注册表中注册命令,然后在网页中调用命令启动本地程序。如果需要传递参数,则需要在注册表命令中的command项中设置如下形式的值。 "XXXXXX\XXXXXXX.exe" "%1"&emsp…...

Carla自动驾驶模拟器安装和使用
Carla自动驾驶模拟器安装和使用 1 安装 ubuntu20.04安装carla0.9.11版本 步骤1:打开下面链接,点击第一个[Ubuntu] CARLA_0.9.11.tar.gz carla-0.9.11源码下载 步骤2:下载完解压到/opt目录下 我的话是先在下载目录上提取解压,然…...

【每日一题】1539. 第 k 个缺失的正整数
1539. 第 k 个缺失的正整数 - 力扣(LeetCode) 给你一个 严格升序排列 的正整数数组 arr 和一个整数 k 。 请你找到这个数组里第 k 个缺失的正整数。 示例 1: 输入:arr [2,3,4,7,11], k 5 输出:9 解释:缺失…...

AI-Chat,一款集全网ai功能的应用(附下载链接)
AI-Chat是一款综合性的聊天机器人,集成了多种先进的模型和功能。它采用了GPT4.0、联网版GPT和清华模型等多种模型,使得其具备更强大的语言处理能力。同时,AI-Chat还融合了AI绘画模型,例如Stable Diffusion绘画、文生图、图生图、艺…...

3、靶场——Pinkys-Place v3(3)
文章目录 一、获取flag41.1 关于SUID提权1.2 通过端口转发获取setuid文件1.3 运行pinksecd文件1.4 利用nm对文件进行分析1.5 构建payload1.6 Fire 二、获取flag52.1 生成ssh公钥2.2 免密登录ssh2.3 以pinksecmanagement的身份进行信息收集2.4 测试程序/usr/local/bin/PSMCCLI2.…...

从Scratch图形化到Python代码:用树莓派给LeArm机械臂做二次开发实战
从Scratch图形化到Python代码:用树莓派给LeArm机械臂做二次开发实战 当Scratch积木块拼接的机械臂动作开始显得单调时,便是时候揭开底层控制的神秘面纱了。本文将带您跨越图形化编程的舒适区,用树莓派的Python环境重新定义LeArm机械臂的智能—…...

高考解析几何“秒杀”技巧:用极点极线快速搞定椭圆定点定值难题
高考解析几何“秒杀”技巧:用极点极线快速搞定椭圆定点定值难题 解析几何作为高考数学的压轴题型,常常让考生望而生畏。面对复杂的计算和抽象的条件,如何在有限时间内快速找到突破口?极点极线理论作为高等几何中的重要工具&#x…...

Kafka Connect集群部署踩坑实录:从单机到高可用的完整配置与监控方案
Kafka Connect生产级部署实战:高可用架构设计与监控体系构建 当数据管道成为企业核心基础设施时,Kafka Connect的稳定性直接关系到业务连续性。去年某电商大促期间,因单点故障导致数据同步延迟6小时的教训仍历历在目——这正是我们需要深入探…...

如何免费解锁WeMod专业版:2026年终极完整指南
如何免费解锁WeMod专业版:2026年终极完整指南 【免费下载链接】Wand-Enhancer Advanced UX and interoperability extension for Wand (WeMod) app 项目地址: https://gitcode.com/gh_mirrors/we/Wand-Enhancer 还在为WeMod专业版的高昂费用而烦恼吗…...

荣品RV1126 SDK编译避坑指南:从环境配置到分区调整,手把手解决常见编译错误
RV1126 SDK编译实战:从环境搭建到分区优化的全流程解决方案 1. 开发环境配置与初始化 RV1126开发环境的搭建是整个开发流程的第一步,也是后续所有工作的基础。一个稳定、高效的开发环境能够显著提升开发效率,减少不必要的错误。 首先需要确保…...

Java 大厂面试 200 题完整版含答案解析
前言本文整理了近两年从阿里、腾讯、字节、美团、京东、拼多多等大厂面试中高频出现的 200 道 Java 面试题,覆盖 Java 基础、集合、并发、JVM、Spring、MySQL、Redis、消息队列、分布式、场景设计 等核心模块,每题都附有简明扼要的答案解析,助…...

终极指南:如何用BabelDOC彻底解决PDF翻译格式错乱问题
终极指南:如何用BabelDOC彻底解决PDF翻译格式错乱问题 【免费下载链接】BabelDOC Yet Another Document Translator 项目地址: https://gitcode.com/GitHub_Trending/ba/BabelDOC 还在为学术论文翻译后排版全乱而烦恼吗?😫 技术文档翻…...

前端工程化实战:基于 Kelivo 模板的配置即代码与自动化工作流
1. 项目概述与核心价值最近在整理个人开发环境时,发现一个挺有意思的项目,叫Chevey339/kelivo。乍一看这个仓库名,可能有点摸不着头脑,但点进去之后,你会发现它是一个围绕特定开发工具或框架进行深度定制、优化和功能增…...

5分钟免费获取:开源鼠标连点器MouseClick完整使用指南
5分钟免费获取:开源鼠标连点器MouseClick完整使用指南 【免费下载链接】MouseClick 🖱️ MouseClick 🖱️ 是一款功能强大的鼠标连点器和管理工具,采用 QT Widget 开发 ,具备跨平台兼容性 。软件界面美观 ,…...

解密VideoDownloadHelper:开源浏览器插件的智能视频提取技术
解密VideoDownloadHelper:开源浏览器插件的智能视频提取技术 【免费下载链接】VideoDownloadHelper Chrome Extension to Help Download Video for Some Video Sites. 项目地址: https://gitcode.com/gh_mirrors/vi/VideoDownloadHelper 当你在浏览微博、秒拍…...