使用Autoware标定工具包联合标定相机和激光雷达
前面文章介绍了,安装autoware标定工具包、ros驱动usb相机、robosense-16线激光雷达的使用,本文记录使用Autoware标定工具包联合标定相机和激光雷达的过程。
1.ros驱动相机,启动相机;启动激光雷达
2.联合录制bag包
rosbag record -a
参照大佬AdamShan的录制建议,时间长一些,调整占位动作
3.打开标定工具(此过程中相机、雷达保持开着状态)
选择相机节点,然后选择Camera->Velodyne
进入界面,根据自己标定板大小设置尺寸(Pattern Size),然后重启一下标定工具
播放点云
rosbag play bag包名称.bag /lslidar_point_cloud:=/points_raw
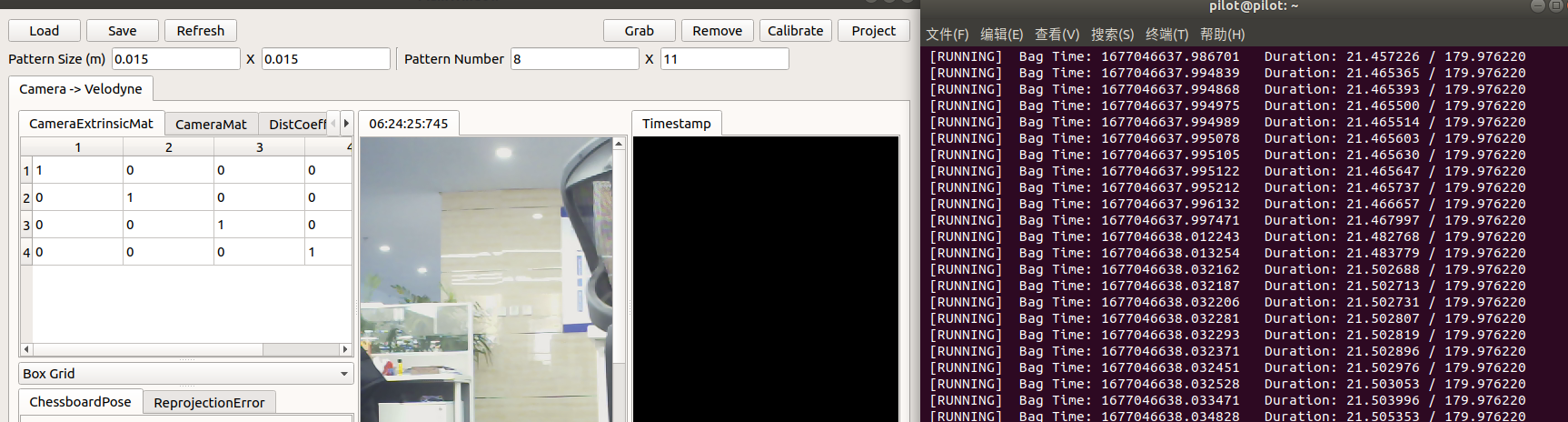
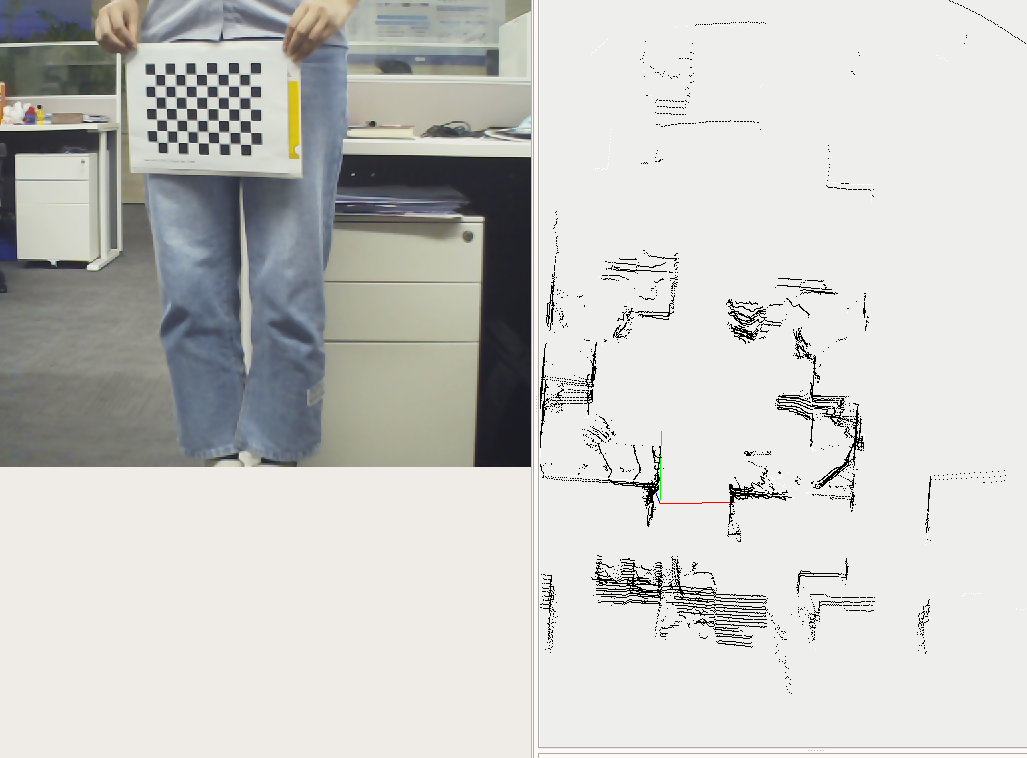
点击一下右侧的雷达窗口,按b键设置背景颜色,选择白色,然后参考大佬AdamShan大佬教程qweasd几个按键调整点云位置直到看到点云。
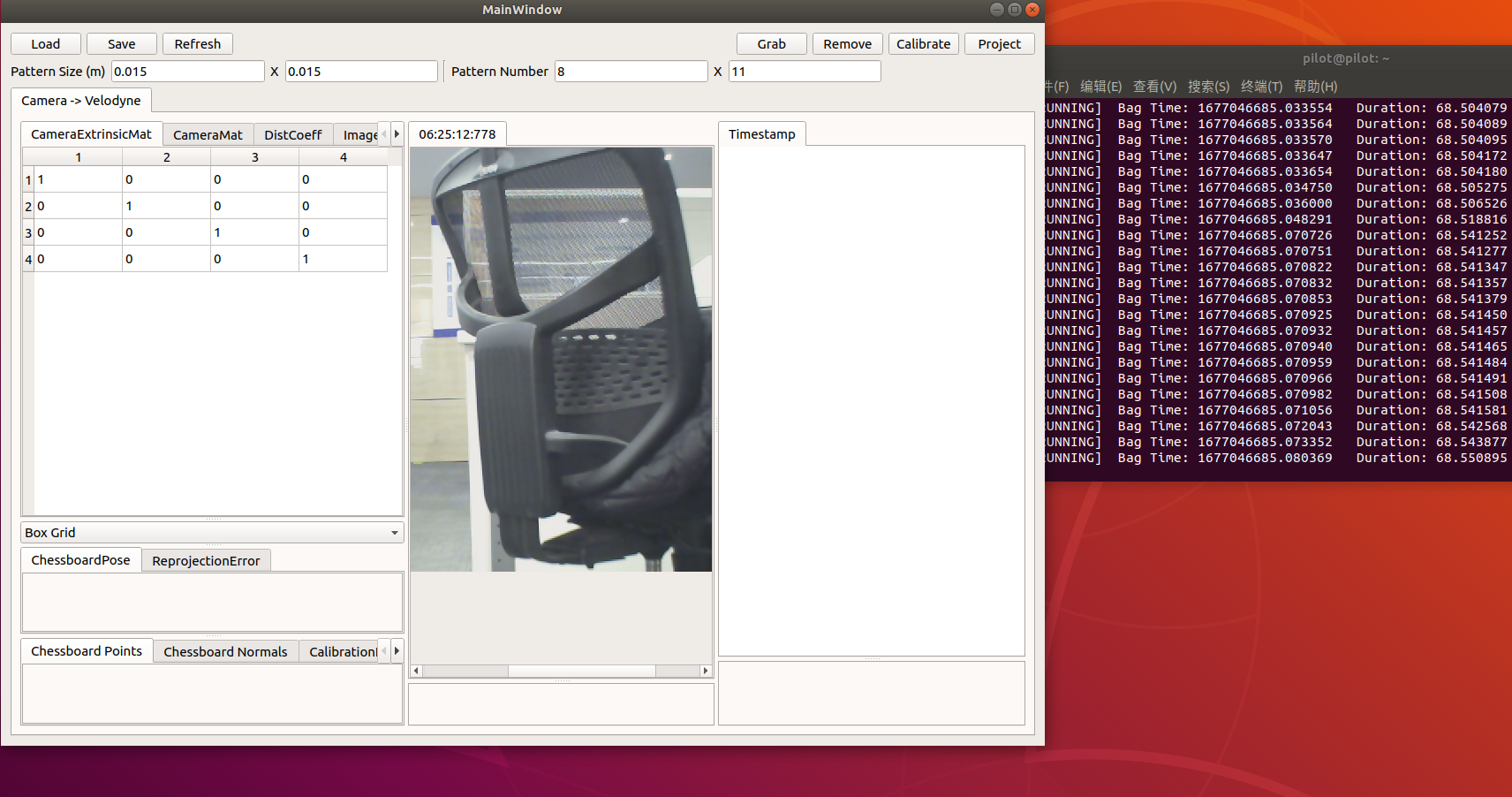
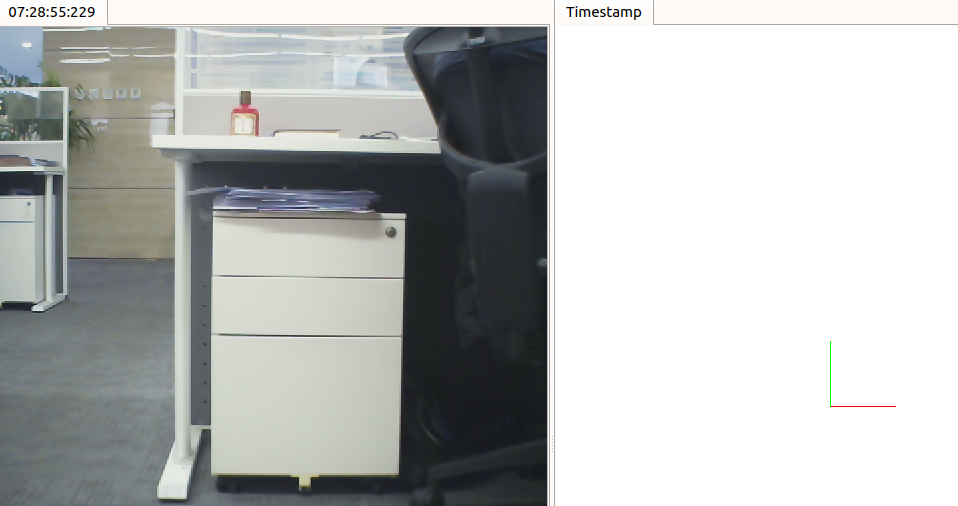
此处本人遇到问题,无法显示雷达部分的界面,雷达窗口处的时间没有变化,显示Timestamp而不是具体时间值。
4.排错、差错
(1)无法显示点云信息
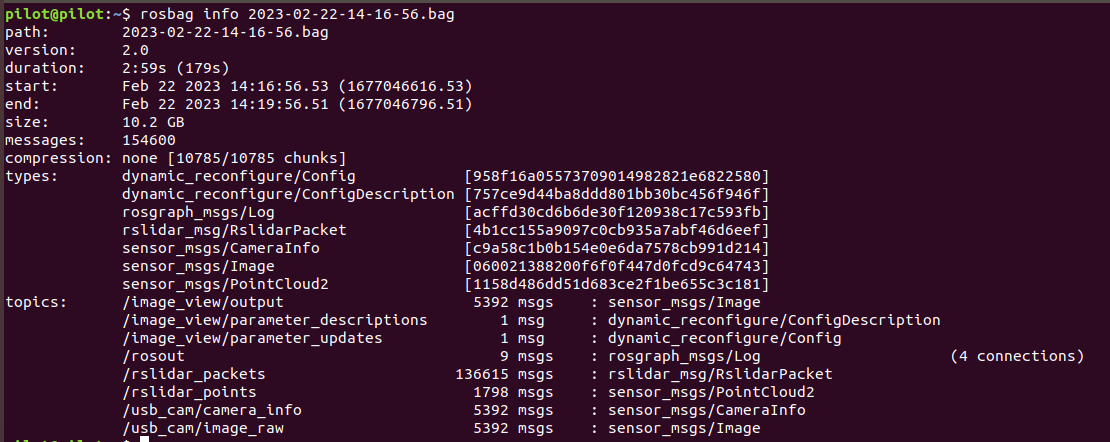
bag的话题信息
git的isuue中找的方法:
rosbag play bagName.bag /YourPointCloud2Topic:=/points_raw
找到问题所在了,在播放bag的时候要添加自己的雷达话题,我的topic在RVIZ的找的
(2)无法grab抓取,抓取时没有反应
初步怀疑是数据包录制的不好,尝试录制新的数据包,新录制的bag包依然不能抓取,点云处识别不到棋盘格。
看到git上关于标定工具的讨论,作者提到,grab不到图像的原因:没有拍摄到棋盘格;棋盘格尺寸设置错误。本人通过和别人教程对比发现棋盘格设置完全错误。
第一,标定板大小设置错误,棋盘格边长是2cm,被误导了
第二,棋盘格角点数错了,也是被误导了
我打印的棋盘格下面有一行备注:www.calib.io|8✖11 Checker Size:15mm,但是实际上,边长2cm,7✖10(格子数目是8*11但是角点是7*10)
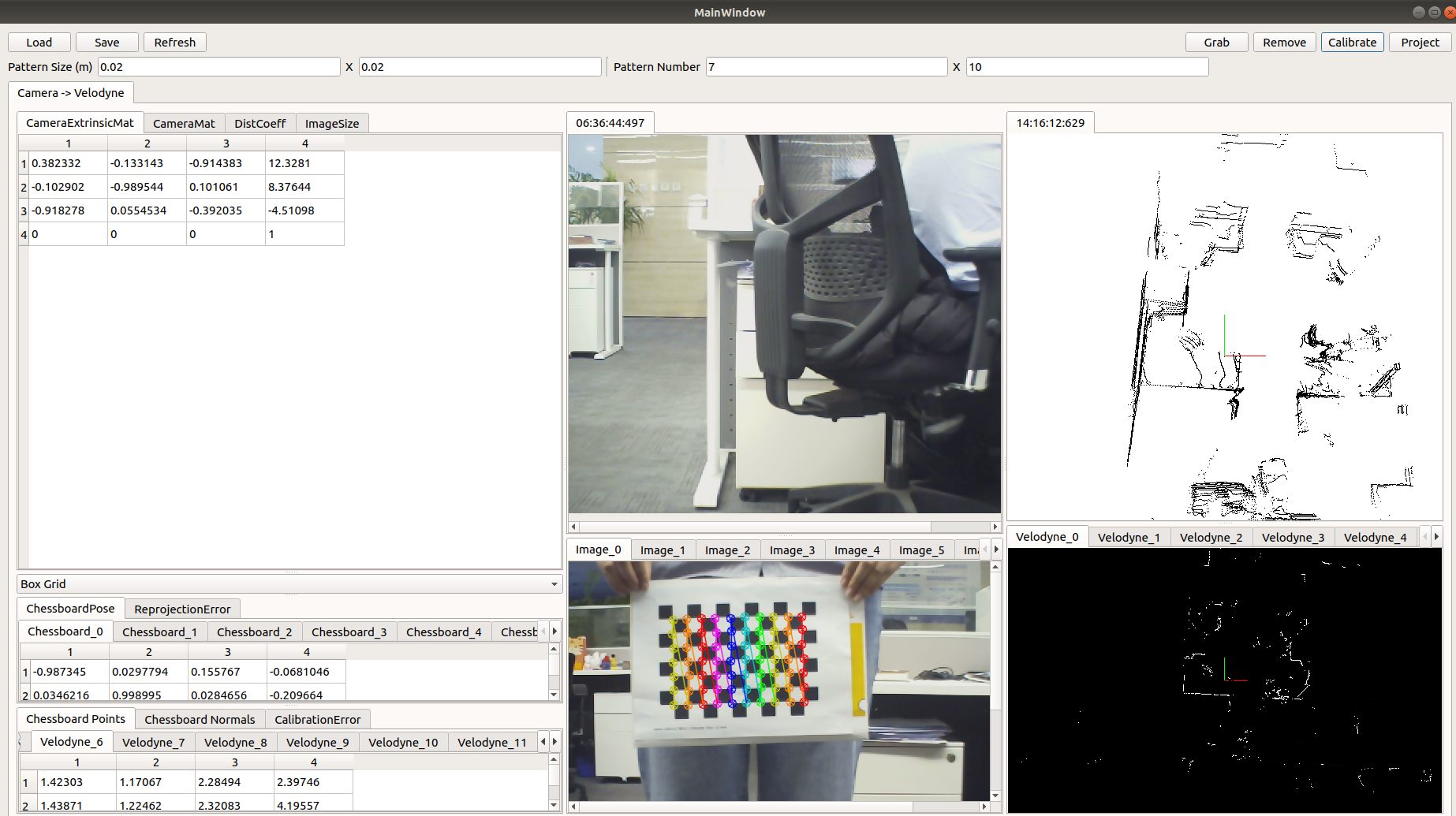
5.标定
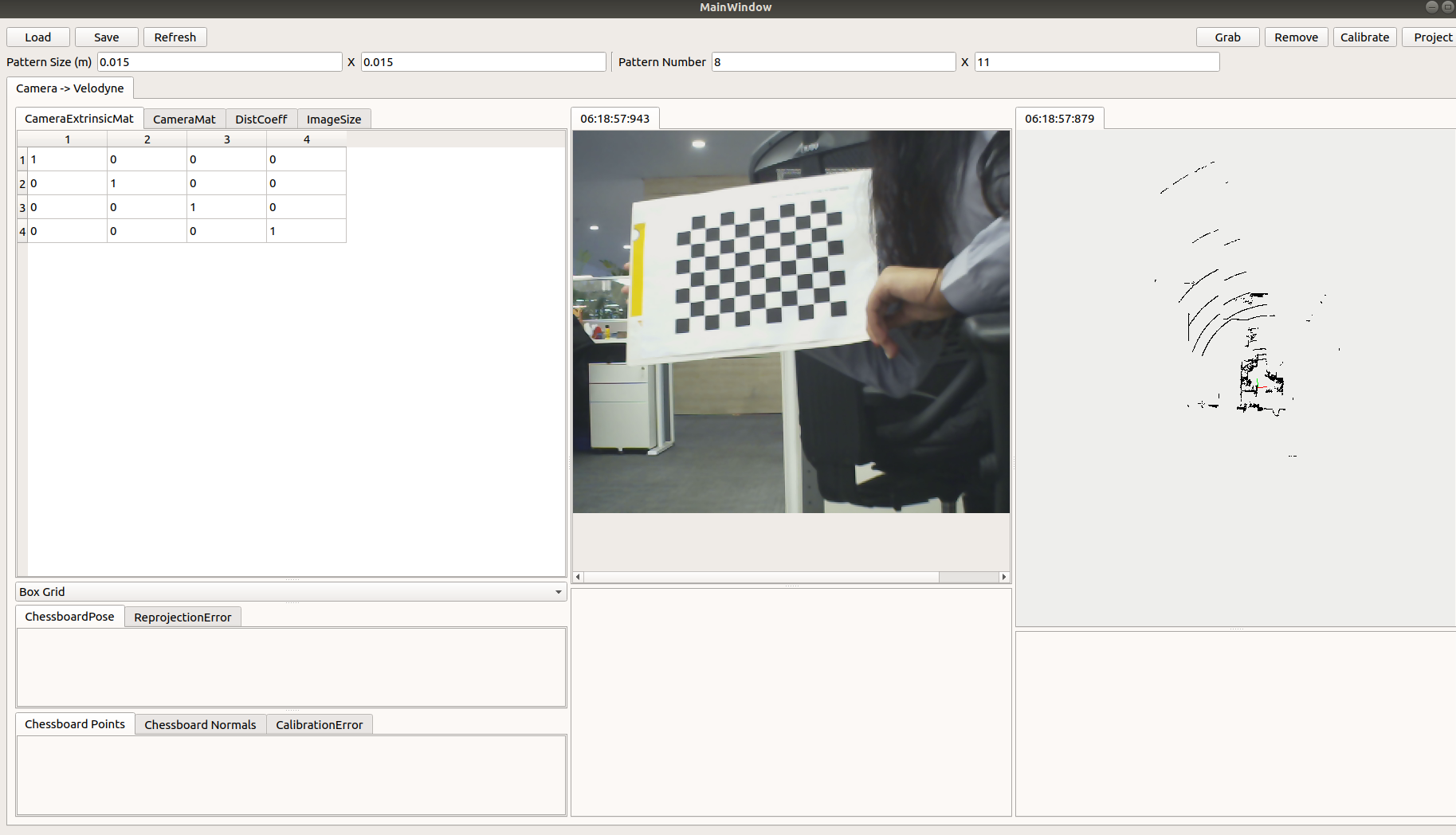
按照前面步骤打开软件,点击点云部分,按⬇键出现坐标轴(忘了叫啥),另外评论区看到点云区域","逗号是放大 "."句号是缩小,上下左右还有那几个字母按键都可以调整;
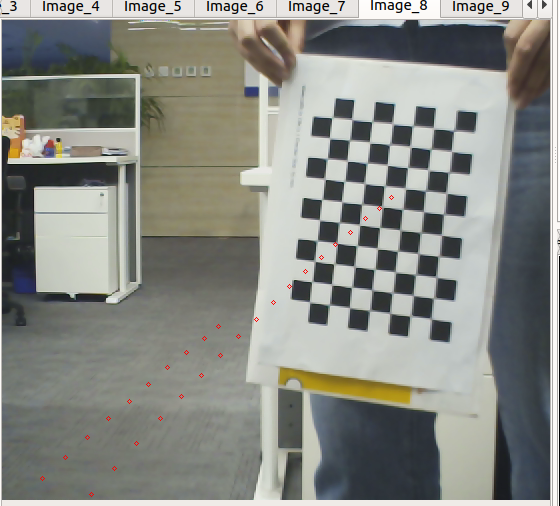
播放点云数据,调整大小;点击grab,对照图像在右下角点云中标注点云直到出现矩阵;标定前要把抓取不好的图像remove掉;点击标定按钮;标定后可以点击project进行验证,大佬说红点分布在标定版是正确的,如果散点不再标定板上重新在右下点云上选点(下图本人选的就不是很好,过程中有几张红点都在标定板上了);最后save保存结果,保存时雷达数据、相机数据不需要保存,选否即可。
至此标定工作完成!!!!有安装Autoware的,可以查看点云-图像融合效果图(可参考下面两篇)本人是单独安装标定工具的,所以无法看融合效果。此标定工具多用几次就熟练了。
下一篇打算记录另外一个相机-雷达标定方法~可以对比一下结果、效果。
欢迎交流、欢迎打赏🤪~打赏基金将全部被我花掉!!!
提供一个制作标定板的链接:
https://calib.io/pages/camera-calibration-pattern-generator
参考教程:
https://blog.csdn.net/weixin_48657767/article/details/126054121?spm=1001.2014.3001.5502
https://blog.csdn.net/AdamShan/article/details/81670732
相关文章:
使用Autoware标定工具包联合标定相机和激光雷达
前面文章介绍了,安装autoware标定工具包、ros驱动usb相机、robosense-16线激光雷达的使用,本文记录使用Autoware标定工具包联合标定相机和激光雷达的过程。1.ros驱动相机,启动相机;启动激光雷达2.联合录制bag包rosbag record -a 参…...
了解线程安全
线程安全是多线程的重点和难点。 线程安全概念 线程安全:在多线程的各种随机调度顺序下,代码没有bug,都能够符合预期的方式来执行,此时认为线程安全 线程不安全:如果在多线程随机调度下代码出现bug,此时…...

【git】git版本控制
目录 1.在合适的位置打开bush,创建仓库 2.检查:跳转到当前文件夹,显示当前文件夹的相对路径 3.初始化 4.创建一个文本文件readme.txt 5.手动向readme文件中添加一些内容 6.把文件添加到暂存区 7.把文件提交到git仓库 8.手动修改readme.txt文件 9.查看当前…...
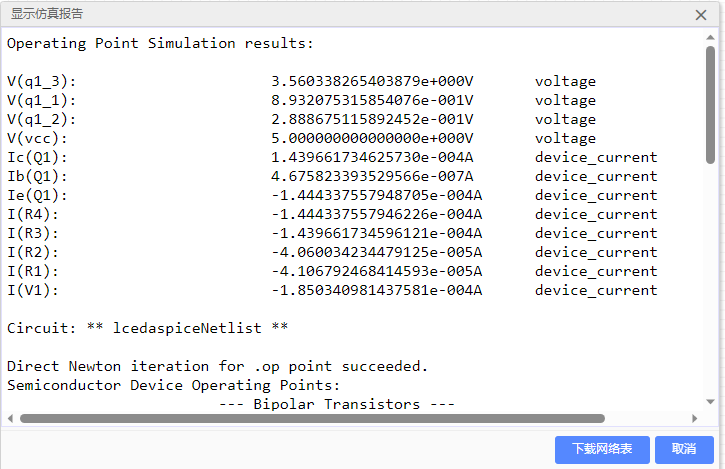
模电学习7. 三极管特性曲线与静态工作点
模电学习7. 三极管特性曲线与静态工作点一、三极管的伏安特性曲线1. 三极管的伏安特性曲线2. 三极管的静态工作点二、合适的静态工作点选择1. 合适静态工作点条件2. 静态工作点的确定三、使用立创EDA仿真查看静态工作点1. 搭建如下图所示测试电路2. 点击菜单仿真、仿真设置3. 运…...

LeetCode题解:633. 平方数之和,双指针,JavaScript,详细注释
原题链接: https://leetcode.cn/problems/sum-of-square-numbers/ 解题思路: a和b一定是000到c\sqrt cc之间的某个值。将a的初始值设为0。b的初始值设为c\sqrt cc,b必须为整数。a和b向中间逼近,查找满足条件的值。由于a和b是…...
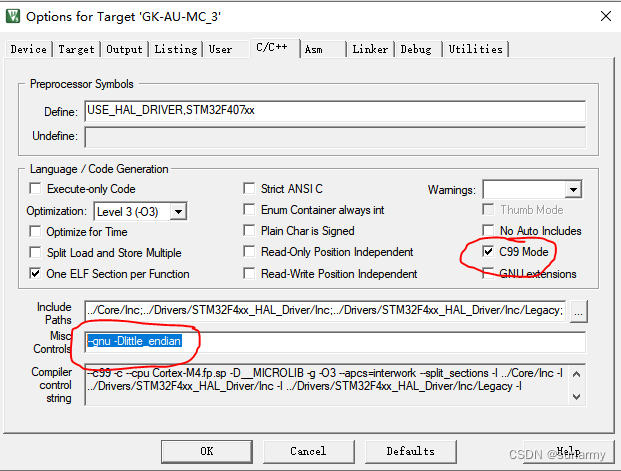
Keil编译头文件iec_std_functions.h错误解决
Keil 编译IEC61131-3库,头文件,大量出现以下错误; cast to type ? is not allowed compiling resource1.c... ..\PLC\rts\matiec\lib\C\iec_std_functions.h(192): error: #119: cast to type "TIME" is not allowed…...
2022 赣育杯 CTF --- Crypto Lost_N wp
文章目录前言题目解题过程解题代码前言 这是去年江西省赛一道有点小坑的密码题,当时没做出来,今天回想起来重新做一下并且记录一下。 题目 Lost_N.py import gmpy2 from Crypto.Util.number import * # part1 flag bSangFor{} d getPrime(435) cou…...

【趋势分析方法三】MATLAB代码实现TFPW-MK检验
目前水文时间序列趋势分析的方法很多,主要分为参数检验和非参数检验两大类: 参数检验中常用的有线性回归法、滑动平均法、累积距平法等非参数检验则主要包括Mann-Kendal(MK)法和 Spearman 秩次相关法等 虽然从理论上讲ÿ…...

一文学会 Spring 整合 MyBatis
✅作者简介:2022年博客新星 第八。热爱国学的Java后端开发者,修心和技术同步精进。 🍎个人主页:Java Fans的博客 🍊个人信条:不迁怒,不贰过。小知识,大智慧。 💞当前专栏…...

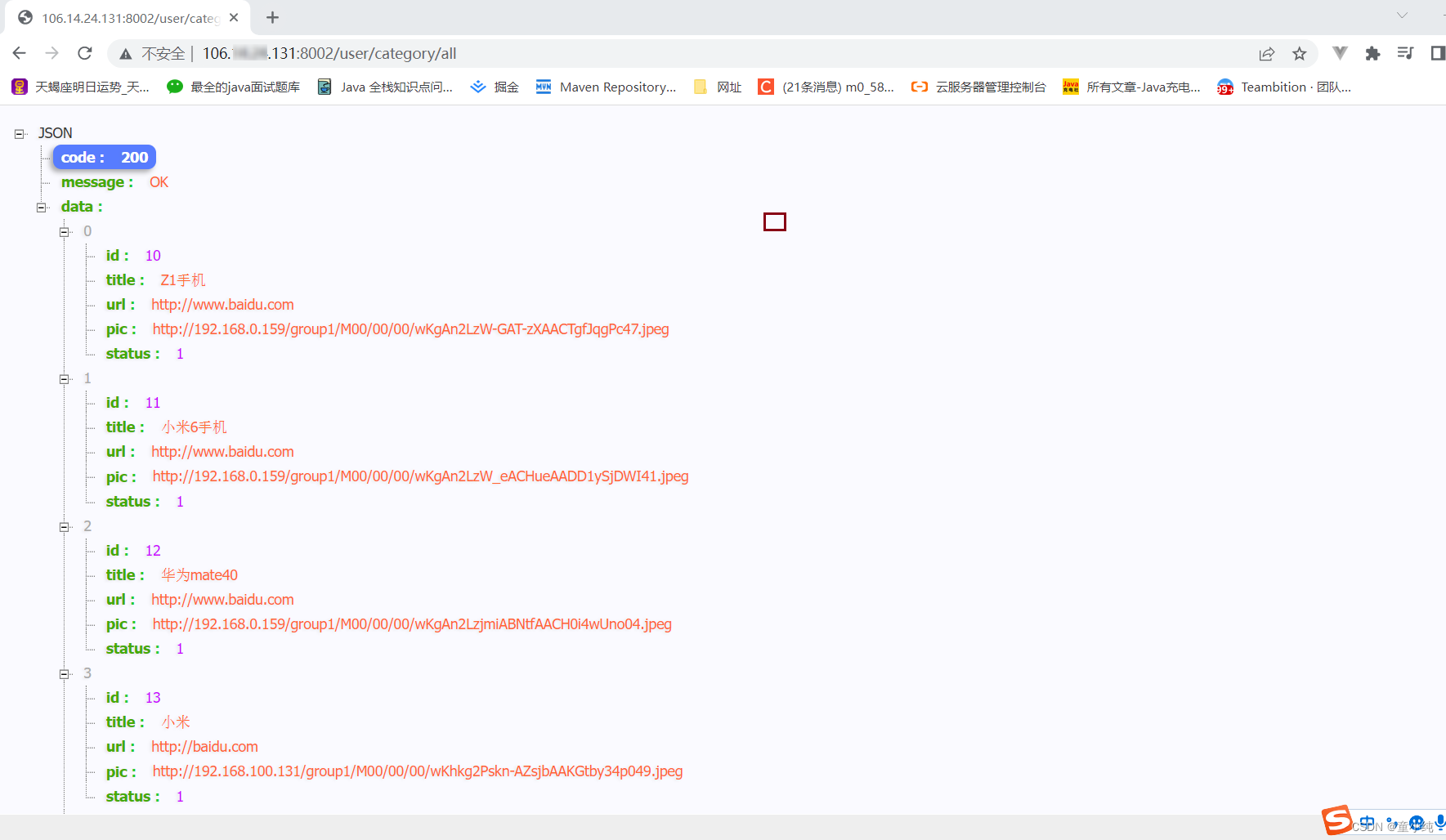
ElasticSearch - 文档 | 索引文档 | 检索文档 | 创建索引并指明映射
文章目录1. ElasticSearch是面向文档的2. 索引员工文档3. 检索员工文档4. 映射1. ElasticSearch是面向文档的 在应用程序中对象很少只是一个简单的键和值的列表。通常,它们拥有更复杂的数据结构,可能包括日期、地理信息、其他对象或者数组等。 Elastic…...

SQL中的DML、DDL、DCL分别是什么意思
SQL命令的分类 数据定义语言 DDL(DataDefinition Language) 是 SQL 语言集中负责数据结构定义。 DDL 的核心指令是CREATE、ALTER、DROP。 操作的对象包括:库、表、视图、索引等。 如:CREATE TABLE ; ALTER INDEX; DROP VIEW; 数据…...

kubeasz部署k8s高可用集群
前言:如无特殊说明,所有操作都用root账号在所有节点执行。 说明:kubeasz是一款国产开源的k8s部署软件,采用ansible role的部署方式,部署k8s二进制集群。熟悉ansible role的用该软件部署k8s方便快捷。 一、机器 deplo…...

2022年工程机械出口专题研究【重工】
文章目录2022年工程机械出口专题研究1、中国是全球工程机械第一大市场,竞争力逐步提升2、工程机械出口高增,市场分布趋于多元,企业营收获益3、海外市场高速增长原因为何?4、海外市场增长动能预测附件:2022年工程机械出…...
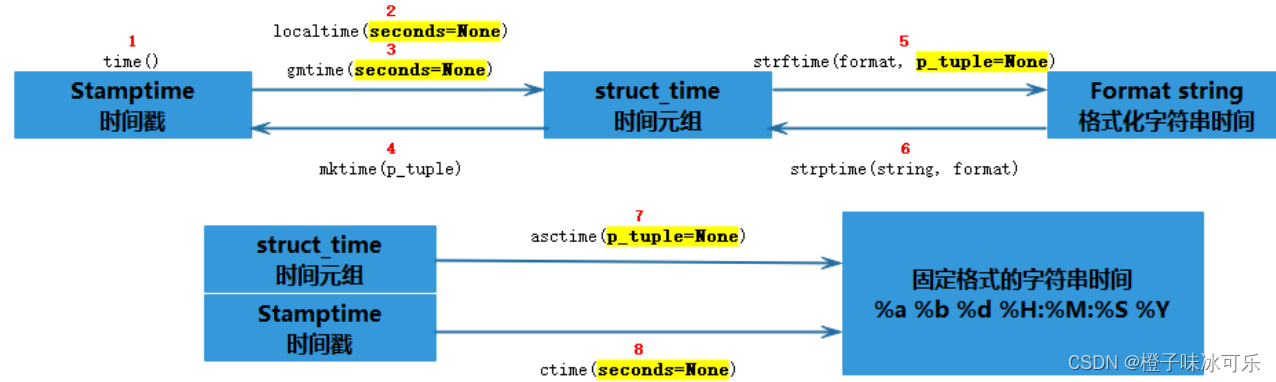
[python入门(51)] - python时间日期格式time和datetime
目录 ❤ 预备知识 ❤ UTC time Coordinated Universal Time ❤ epoch time ❤ timestamp(时间戳) ❤ stamptime时间戳 ❤ struct_time时间元组 ❤ format time 格式化时间 ❤ time模块编辑 ❤ 获取当前时间的方法 ❤ 当传入默认参…...

别担心ChatGPT距离替代程序猿还有距离
经过多天对chat-GPT在工作的使用,我得出一个结论,它睁眼瞎说就算了,它还积极认错,绝不改正,错误答案极具误导性,啥也不说了,请看图。 经过N次较量它固执的认为 0011 1101 0110 0101在最高位是左…...
SpringBoot项目打包部署到阿里云服务器、通过Maven插件制作Docker镜像、部署项目容器、配置生产环境
制作通用模块jar包 通用模块不是运行的,而且要被其他模块引入的,所以该模块不能采用springboot打包方式制作jar包,否则其他模块无法引入通用模块。 1、修改通用模块,设置模块为非Springboot项目 <?xml version"1.0&qu…...
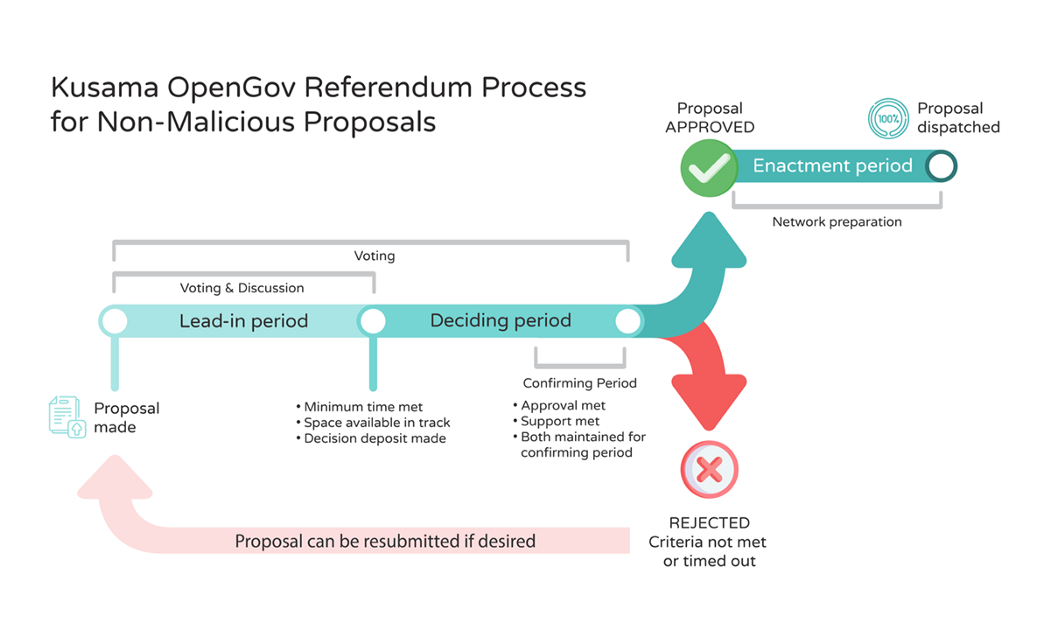
OpenGov的首个方案已上线Moonriver
随着公投128的通过,作为Runtime 2100的一部分,Moonbeam在Moonriver上推出了OpenGov。Moonbeam上的OpenGov部署将从Moonriver开始,以获得社区反馈。未来将举行公投,让社区来决定OpenGov如何发展并转移至Moonbeam。 Moonriver上的O…...

(三十一)大白话MySQL如果事务执行到一半要回滚怎么办?再探undo log回滚日志原理
之前我们已经给大家深入讲解了在执行增删改操作时候的redo log的重做日志原理,其实说白了,就是你对buffer pool里的缓存页执行增删改操作的时候,必须要写对应的redo log记录下来你做了哪些修改 如下图所示: 这样万一要是你提交事…...
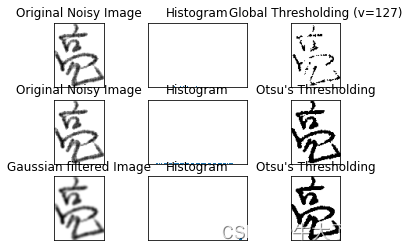
机器学习-基于KNN及其改进的汉字图像识别系统
一、简介和环境准备 knn一般指邻近算法。 邻近算法,或者说K最邻近(KNN,K-NearestNeighbor)分类算法是数据挖掘分类技术中最简单的方法之一。而lmknn是局部均值k最近邻分类算法。 本次实验环境需要用的是Google Colab和Google Dr…...

Zebec生态持续深度布局,ZBC通证月内翻倍或只是开始
“Zebec生态近日利好不断,除了推出了回购计划外, Nautilus Chain 、Zebec Labs等也即将面向市场,都将为ZBC通证深度赋能。而ZBC通证涨幅月内突破100%,或许只是开始。”近日,流支付生态Zebec生态通证ZBC迎来了大涨&…...

无机布防火卷帘门价格怎么算?按尺寸定制,按需报价
无机布防火卷帘门作为建筑防火分区的核心设备,价格一直是工程采购的关注重点。很多用户在询价时,会发现不同厂家的报价差异较大,这是因为无机布防火卷帘门的价格并非按统一单价计算,而是完全根据项目的实际需求定制化核算。 &…...

从理论推导到代码实现:手把手教你用Python/Numpy写出守恒形式的NS方程求解器
从理论推导到代码实现:手把手教你用Python/Numpy写出守恒形式的NS方程求解器计算流体力学(CFD)的魅力在于它将抽象的数学方程转化为可执行的代码,让流体运动的奥秘在计算机中重现。对于已经掌握流体力学理论的中高级学习者来说&am…...
重构)
嘈杂工业场景下的自适应VAD与双码本声纹识别鉴权系统:基于端侧轻量化神经网络与向量量化(VQ)重构
在大型化工车间、能源集控中心以及金融极密隔离库房中,离线声纹识别是物理访问控制和身份安全核验的重要生物特征屏障。然而,在环境本底噪声高达80dB以上的恶劣工业场景下,常规的语音活动检测(VAD)会频繁误触ÿ…...

从开题到定稿零焦虑:okbiye AI 论文写作,帮你把毕业季的 “大山” 变成坦途
okbiye-免费查重复率aigc检测/开题报告/毕业论文/智能排版/文献综述/AI PPT毕业论文 - Okbiye智能写作https://www.okbiye.com/ai/bylw 毕业季的深夜,宿舍台灯下的屏幕亮着刺眼的光,文档里的字数停留在三位数,而 deadline 正一天天逼近。你是…...

淘宝淘金币自动化脚本终极指南:如何每天节省25分钟实现智能任务管理
淘宝淘金币自动化脚本终极指南:如何每天节省25分钟实现智能任务管理 【免费下载链接】taojinbi 淘宝淘金币自动执行脚本,包含蚂蚁森林收取能量,芭芭农场全任务,解放你的双手 项目地址: https://gitcode.com/gh_mirrors/ta/taoji…...

【DeepSeek集成测试黄金标准】:20年专家亲授5大避坑指南与自动化落地框架
更多请点击: https://intelliparadigm.com 第一章:DeepSeek集成测试黄金标准的演进与核心价值 集成测试在大语言模型工程化落地过程中已从“验证功能可用”跃迁为“保障推理一致性、上下文鲁棒性与安全边界的三位一体质量门禁”。DeepSeek系列模型&…...
)
实战对比:用直方图均衡化与CLAHE拯救你的背光/过曝照片(附Python完整代码)
拯救逆光废片:直方图均衡化与CLAHE的实战效果对比每次旅行回来整理照片时,总会有几张因为光线问题几乎要删除的废片——要么是逆光下的人脸黑得看不清五官,要么是天空过曝失去所有云层细节。这些照片往往记录着重要时刻,直接删除实…...

因果推断与机器学习融合:量化分析社会运动中镇压与抗议的动态关系
1. 项目概述:当数据科学遇见社会运动如果你研究过社会运动,尤其是那些看似突然爆发、席卷全国的抗议浪潮,你可能会被一个核心问题困扰:国家机器的镇压,究竟是浇灭火焰的冷水,还是火上浇油的催化剂ÿ…...
)
从单体到事件驱动的生死跃迁:DeepSeek架构委员会认证的6阶段迁移路线图(含风险热力图与回滚触发阈值表)
更多请点击: https://codechina.net 第一章:从单体到事件驱动的生死跃迁:DeepSeek架构委员会认证的6阶段迁移路线图(含风险热力图与回滚触发阈值表) 向事件驱动架构(EDA)演进不是功能迭代&…...

BiliBiliCCSubtitle终极指南:5个实战技巧高效下载B站字幕
BiliBiliCCSubtitle终极指南:5个实战技巧高效下载B站字幕 【免费下载链接】BiliBiliCCSubtitle 一个用于下载B站(哔哩哔哩)CC字幕及转换的工具; 项目地址: https://gitcode.com/gh_mirrors/bi/BiliBiliCCSubtitle 还在为无法保存B站视频字幕而烦恼࿱…...