【Python】基于OpenCV人脸追踪、手势识别控制的求生之路FPS游戏操作
【Python】基于OpenCV人脸追踪、手势识别控制的求生之路FPS游戏操作
文章目录
- 手势识别
- 人脸追踪
- 键盘控制
- 整体代码
- 附录:列表的赋值类型和py打包
- 列表赋值
- BUG复现
- 代码改进
- 优化
- 总结
- py打包
视频:
基于OpenCV人脸追踪、手势识别控制的求实之路FPS游戏操作
手势识别
采用MediaPipe模块来完成手势识别 同时通过计算各个关键点与手掌平面的角度来判断手指是否弯曲、伸展
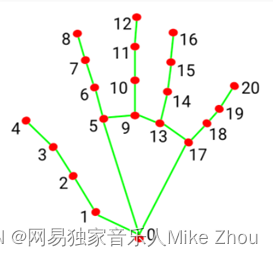
如上图为各个关键点的ID序号
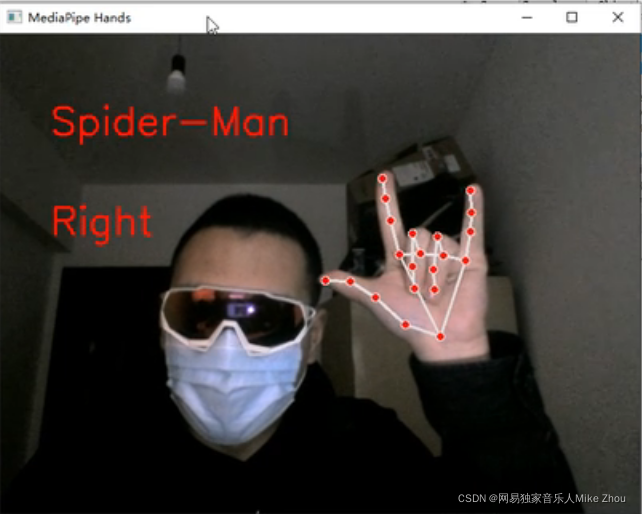
比如蜘蛛侠手势:
elif (angle_list[0]<thr_angle_s) and (angle_list[1]<thr_angle_s) and (angle_list[2]>thr_angle) and (angle_list[3]>thr_angle) and (angle_list[4]<thr_angle_s):gesture_str = "Spider-Man"
就是判断拇指 食指 小指伸展 其他闭合
【优秀课设】基于OpenCV+MediaPipe的手势识别(数字、石头剪刀布等手势识别)
def vector_2d_angle(v1,v2):'''求解二维向量的角度'''v1_x=v1[0]v1_y=v1[1]v2_x=v2[0]v2_y=v2[1]try:angle_= math.degrees(math.acos((v1_x*v2_x+v1_y*v2_y)/(((v1_x**2+v1_y**2)**0.5)*((v2_x**2+v2_y**2)**0.5))))except:angle_ =65535.if angle_ > 180.:angle_ = 65535.return angle_def hand_angle(hand_):'''获取对应手相关向量的二维角度,根据角度确定手势'''angle_list = []#---------------------------- thumb 大拇指角度angle_ = vector_2d_angle(((int(hand_[0][0])- int(hand_[2][0])),(int(hand_[0][1])-int(hand_[2][1]))),((int(hand_[3][0])- int(hand_[4][0])),(int(hand_[3][1])- int(hand_[4][1]))))angle_list.append(angle_)#---------------------------- index 食指角度angle_ = vector_2d_angle(((int(hand_[0][0])-int(hand_[6][0])),(int(hand_[0][1])- int(hand_[6][1]))),((int(hand_[7][0])- int(hand_[8][0])),(int(hand_[7][1])- int(hand_[8][1]))))angle_list.append(angle_)#---------------------------- middle 中指角度angle_ = vector_2d_angle(((int(hand_[0][0])- int(hand_[10][0])),(int(hand_[0][1])- int(hand_[10][1]))),((int(hand_[11][0])- int(hand_[12][0])),(int(hand_[11][1])- int(hand_[12][1]))))angle_list.append(angle_)#---------------------------- ring 无名指角度angle_ = vector_2d_angle(((int(hand_[0][0])- int(hand_[14][0])),(int(hand_[0][1])- int(hand_[14][1]))),((int(hand_[15][0])- int(hand_[16][0])),(int(hand_[15][1])- int(hand_[16][1]))))angle_list.append(angle_)#---------------------------- pink 小拇指角度angle_ = vector_2d_angle(((int(hand_[0][0])- int(hand_[18][0])),(int(hand_[0][1])- int(hand_[18][1]))),((int(hand_[19][0])- int(hand_[20][0])),(int(hand_[19][1])- int(hand_[20][1]))))angle_list.append(angle_)return angle_listdef h_gesture(angle_list):'''# 二维约束的方法定义手势# fist five gun love one six three thumbup yeah'''thr_angle = 65. #手指闭合则大于这个值(大拇指除外)thr_angle_thumb = 53. #大拇指闭合则大于这个值thr_angle_s = 49. #手指张开则小于这个值gesture_str = "Unknown"if 65535. not in angle_list:if (angle_list[0]>thr_angle_thumb) and (angle_list[1]>thr_angle) and (angle_list[2]>thr_angle) and (angle_list[3]>thr_angle) and (angle_list[4]>thr_angle):gesture_str = "0"elif (angle_list[0]>thr_angle_thumb) and (angle_list[1]<thr_angle_s) and (angle_list[2]>thr_angle) and (angle_list[3]>thr_angle) and (angle_list[4]>thr_angle):gesture_str = "1"elif (angle_list[0]>thr_angle_thumb) and (angle_list[1]<thr_angle_s) and (angle_list[2]<thr_angle_s) and (angle_list[3]>thr_angle) and (angle_list[4]>thr_angle):gesture_str = "2"elif (angle_list[0]>thr_angle_thumb) and (angle_list[1]<thr_angle_s) and (angle_list[2]<thr_angle_s) and (angle_list[3]<thr_angle_s) and (angle_list[4]>thr_angle):gesture_str = "3"elif (angle_list[0]>thr_angle_thumb) and (angle_list[1]<thr_angle_s) and (angle_list[2]<thr_angle_s) and (angle_list[3]<thr_angle_s) and (angle_list[4]<thr_angle_s):gesture_str = "4"elif (angle_list[0]<thr_angle_s) and (angle_list[1]<thr_angle_s) and (angle_list[2]<thr_angle_s) and (angle_list[3]<thr_angle_s) and (angle_list[4]<thr_angle_s):gesture_str = "5"elif (angle_list[0]<thr_angle_s) and (angle_list[1]>thr_angle) and (angle_list[2]>thr_angle) and (angle_list[3]>thr_angle) and (angle_list[4]<thr_angle_s):gesture_str = "6"elif (angle_list[0]<thr_angle_s) and (angle_list[1]<thr_angle_s) and (angle_list[2]>thr_angle) and (angle_list[3]>thr_angle) and (angle_list[4]>thr_angle):gesture_str = "8"elif (angle_list[0]>thr_angle_thumb) and (angle_list[1]>thr_angle) and (angle_list[2]>thr_angle) and (angle_list[3]>thr_angle) and (angle_list[4]<thr_angle_s):gesture_str = "Pink Up"elif (angle_list[0]<thr_angle_s) and (angle_list[1]>thr_angle) and (angle_list[2]>thr_angle) and (angle_list[3]>thr_angle) and (angle_list[4]>thr_angle):gesture_str = "Thumb Up"elif (angle_list[0]>thr_angle_thumb) and (angle_list[1]>thr_angle) and (angle_list[2]<thr_angle_s) and (angle_list[3]>thr_angle) and (angle_list[4]>thr_angle):gesture_str = "Fuck"elif (angle_list[0]>thr_angle_thumb) and (angle_list[1]>thr_angle) and (angle_list[2]<thr_angle_s) and (angle_list[3]<thr_angle_s) and (angle_list[4]<thr_angle_s):gesture_str = "Princess"elif (angle_list[0]<thr_angle_s) and (angle_list[1]<thr_angle_s) and (angle_list[2]<thr_angle_s) and (angle_list[3]>thr_angle) and (angle_list[4]>thr_angle):gesture_str = "Bye"elif (angle_list[0]<thr_angle_s) and (angle_list[1]<thr_angle_s) and (angle_list[2]>thr_angle) and (angle_list[3]>thr_angle) and (angle_list[4]<thr_angle_s):gesture_str = "Spider-Man"elif (angle_list[0]>thr_angle_thumb) and (angle_list[1]<thr_angle_s) and (angle_list[2]>thr_angle) and (angle_list[3]>thr_angle) and (angle_list[4]<thr_angle_s):gesture_str = "Rock'n'Roll"return gesture_strdef hand_detect():global qglobal kill_all_flagglobal cam_imgbye_flag = 0bye_time = time.time()hand_jugg = Nonegesture_str = Nonewhile True:time.sleep(0.1)while q==0:time.sleep(0.1)frame = cv2.cvtColor(cam_img, cv2.COLOR_BGR2RGB)results = hands.process(frame)if results.multi_handedness: for hand_label in results.multi_handedness:hand_jugg=str(hand_label).split('"')[1]+" Hand"print(hand_jugg)
# cv2.putText(faceImg,hand_jugg,(50,200),0,1.3,(0,0,255),2)if results.multi_hand_landmarks:for hand_landmarks in results.multi_hand_landmarks:
# mp_drawing.draw_landmarks(faceImg, hand_landmarks, mp_hands.HAND_CONNECTIONS)hand_local = []for i in range(21):x = hand_landmarks.landmark[i].x*frame.shape[1]y = hand_landmarks.landmark[i].y*frame.shape[0]hand_local.append((x,y))if hand_local:angle_list = hand_angle(hand_local)gesture_str = h_gesture(angle_list)print(gesture_str)
# cv2.putText(faceImg,gesture_str,(50,100),0,1.3,(0,0,255),2)if gesture_str == "Bye":if bye_flag == 0:bye_flag = 1elif bye_flag == 1 and time.time() - bye_time >= 3:kill_all_flag = 1q = 1print("Good-Bye")else:bye_flag = 1 else:Keyborad(hand_jugg,gesture_str)bye_flag = 0hand_jugg = Nonegesture_str = Noneif q == 1:breakif kill_all_flag == 1:breakreturn
人脸追踪
【优秀毕设V2.0】基于树莓派的OpenCV-Python摄像头人脸追踪及手势识别、网络地址推流及远程控制系统(多功能系统、含演示视频)
此部分简单易懂
就是靠识别人脸的位置 然后再判断位置就可以了
def track():global qglobal kill_all_flagglobal cam_imgglobal left_pointglobal right_pointwhile True:time.sleep(0.1)while q==0: time.sleep(0.05) gray = cv2.cvtColor(cam_img,cv2.COLOR_BGR2GRAY)faceRects = classifier.detectMultiScale(gray,scaleFactor=1.2,minNeighbors=3,minSize=(32, 32))if len(faceRects):x,y,w,h = faceRects[0]# 框选出人脸 最后一个参数2是框线宽度
# cv2.rectangle(faceImg,(x, y), (x + w, y + h), (0,255,0), 2)central_point = x+w/2 if central_point > left_point:print("Right")Mouse(1)elif central_point < right_point:print("Left")Mouse(2)else:Mouse(0)if q == 1:print("S")breakif kill_all_flag == 1:breakreturn
键盘控制
采用pyautogui库来进行
以下两个函数分别是鼠标移动和键盘操作
def Mouse(flag):print(flag)if flag==1:pyautogui.moveTo(100, 100, duration=0.25)passelif flag==2:pyautogui.moveRel(-50, 0, duration=0.25)pass
def Keyborad(hand_jugg,gesture_str):print(hand_jugg,gesture_str)if hand_jugg=="Right Hand":if gesture_str=="1":pyautogui.click()elif gesture_str=="2":pyautogui.click(button='right')elif gesture_str=="4":pyautogui.mouseDown()elif gesture_str=="5":pyautogui.mouseUp()
整体代码
整体代码将三个部分整合起来 并且用多线程的方式 将摄像头获取、人脸追踪、手势识别跑起来 互不影响
# -*- coding: utf-8 -*-
"""
Created on Sun Sep 10 10:54:53 2023@author: ZHOU
"""import cv2
import threading
import mediapipe as mp
import math
import timeimport pyautoguipyautogui.FAILSAFE = True # 启用自动防故障功能,左上角的坐标为(0,0),将鼠标移到屏幕的左上角,来抛出failSafeException异常global q
q = 0
global kill_all_flag
kill_all_flag = 0cap = cv2.VideoCapture(0) # 开启摄像头
classifier = cv2.CascadeClassifier('./haarcascade_frontalface_alt2.xml')global cam_img
ok, cam_img = cap.read() # 读取摄像头图像
if ok is False:q = 1kill_all_flag = 1print('无法读取到摄像头!')
high=cam_img.shape[0]
width=cam_img.shape[1]
global left_point
global right_point
left_point = width/2+width*0.04
right_point = width/2-width*0.04mp_drawing = mp.solutions.drawing_utils
mp_hands = mp.solutions.hands
hands = mp_hands.Hands(static_image_mode=False,max_num_hands=1,min_detection_confidence=0.6,min_tracking_confidence=0.75)def Mouse(flag):print(flag)if flag==1:
# pyautogui.moveTo(100, 100, duration=0.25)passelif flag==2:
# pyautogui.moveRel(-50, 0, duration=0.25)pass
def Keyborad(hand_jugg,gesture_str):print(hand_jugg,gesture_str)if hand_jugg=="Right Hand":if gesture_str=="1":pyautogui.click()elif gesture_str=="2":pyautogui.click(button='right')elif gesture_str=="4":pyautogui.mouseDown()elif gesture_str=="5":pyautogui.mouseUp()def vector_2d_angle(v1,v2):'''求解二维向量的角度'''v1_x=v1[0]v1_y=v1[1]v2_x=v2[0]v2_y=v2[1]try:angle_= math.degrees(math.acos((v1_x*v2_x+v1_y*v2_y)/(((v1_x**2+v1_y**2)**0.5)*((v2_x**2+v2_y**2)**0.5))))except:angle_ =65535.if angle_ > 180.:angle_ = 65535.return angle_def hand_angle(hand_):'''获取对应手相关向量的二维角度,根据角度确定手势'''angle_list = []#---------------------------- thumb 大拇指角度angle_ = vector_2d_angle(((int(hand_[0][0])- int(hand_[2][0])),(int(hand_[0][1])-int(hand_[2][1]))),((int(hand_[3][0])- int(hand_[4][0])),(int(hand_[3][1])- int(hand_[4][1]))))angle_list.append(angle_)#---------------------------- index 食指角度angle_ = vector_2d_angle(((int(hand_[0][0])-int(hand_[6][0])),(int(hand_[0][1])- int(hand_[6][1]))),((int(hand_[7][0])- int(hand_[8][0])),(int(hand_[7][1])- int(hand_[8][1]))))angle_list.append(angle_)#---------------------------- middle 中指角度angle_ = vector_2d_angle(((int(hand_[0][0])- int(hand_[10][0])),(int(hand_[0][1])- int(hand_[10][1]))),((int(hand_[11][0])- int(hand_[12][0])),(int(hand_[11][1])- int(hand_[12][1]))))angle_list.append(angle_)#---------------------------- ring 无名指角度angle_ = vector_2d_angle(((int(hand_[0][0])- int(hand_[14][0])),(int(hand_[0][1])- int(hand_[14][1]))),((int(hand_[15][0])- int(hand_[16][0])),(int(hand_[15][1])- int(hand_[16][1]))))angle_list.append(angle_)#---------------------------- pink 小拇指角度angle_ = vector_2d_angle(((int(hand_[0][0])- int(hand_[18][0])),(int(hand_[0][1])- int(hand_[18][1]))),((int(hand_[19][0])- int(hand_[20][0])),(int(hand_[19][1])- int(hand_[20][1]))))angle_list.append(angle_)return angle_listdef h_gesture(angle_list):'''# 二维约束的方法定义手势# fist five gun love one six three thumbup yeah'''thr_angle = 65. #手指闭合则大于这个值(大拇指除外)thr_angle_thumb = 53. #大拇指闭合则大于这个值thr_angle_s = 49. #手指张开则小于这个值gesture_str = "Unknown"if 65535. not in angle_list:if (angle_list[0]>thr_angle_thumb) and (angle_list[1]>thr_angle) and (angle_list[2]>thr_angle) and (angle_list[3]>thr_angle) and (angle_list[4]>thr_angle):gesture_str = "0"elif (angle_list[0]>thr_angle_thumb) and (angle_list[1]<thr_angle_s) and (angle_list[2]>thr_angle) and (angle_list[3]>thr_angle) and (angle_list[4]>thr_angle):gesture_str = "1"elif (angle_list[0]>thr_angle_thumb) and (angle_list[1]<thr_angle_s) and (angle_list[2]<thr_angle_s) and (angle_list[3]>thr_angle) and (angle_list[4]>thr_angle):gesture_str = "2"elif (angle_list[0]>thr_angle_thumb) and (angle_list[1]<thr_angle_s) and (angle_list[2]<thr_angle_s) and (angle_list[3]<thr_angle_s) and (angle_list[4]>thr_angle):gesture_str = "3"elif (angle_list[0]>thr_angle_thumb) and (angle_list[1]<thr_angle_s) and (angle_list[2]<thr_angle_s) and (angle_list[3]<thr_angle_s) and (angle_list[4]<thr_angle_s):gesture_str = "4"elif (angle_list[0]<thr_angle_s) and (angle_list[1]<thr_angle_s) and (angle_list[2]<thr_angle_s) and (angle_list[3]<thr_angle_s) and (angle_list[4]<thr_angle_s):gesture_str = "5"elif (angle_list[0]<thr_angle_s) and (angle_list[1]>thr_angle) and (angle_list[2]>thr_angle) and (angle_list[3]>thr_angle) and (angle_list[4]<thr_angle_s):gesture_str = "6"elif (angle_list[0]<thr_angle_s) and (angle_list[1]<thr_angle_s) and (angle_list[2]>thr_angle) and (angle_list[3]>thr_angle) and (angle_list[4]>thr_angle):gesture_str = "8"elif (angle_list[0]>thr_angle_thumb) and (angle_list[1]>thr_angle) and (angle_list[2]>thr_angle) and (angle_list[3]>thr_angle) and (angle_list[4]<thr_angle_s):gesture_str = "Pink Up"elif (angle_list[0]<thr_angle_s) and (angle_list[1]>thr_angle) and (angle_list[2]>thr_angle) and (angle_list[3]>thr_angle) and (angle_list[4]>thr_angle):gesture_str = "Thumb Up"elif (angle_list[0]>thr_angle_thumb) and (angle_list[1]>thr_angle) and (angle_list[2]<thr_angle_s) and (angle_list[3]>thr_angle) and (angle_list[4]>thr_angle):gesture_str = "Fuck"elif (angle_list[0]>thr_angle_thumb) and (angle_list[1]>thr_angle) and (angle_list[2]<thr_angle_s) and (angle_list[3]<thr_angle_s) and (angle_list[4]<thr_angle_s):gesture_str = "Princess"elif (angle_list[0]<thr_angle_s) and (angle_list[1]<thr_angle_s) and (angle_list[2]<thr_angle_s) and (angle_list[3]>thr_angle) and (angle_list[4]>thr_angle):gesture_str = "Bye"elif (angle_list[0]<thr_angle_s) and (angle_list[1]<thr_angle_s) and (angle_list[2]>thr_angle) and (angle_list[3]>thr_angle) and (angle_list[4]<thr_angle_s):gesture_str = "Spider-Man"elif (angle_list[0]>thr_angle_thumb) and (angle_list[1]<thr_angle_s) and (angle_list[2]>thr_angle) and (angle_list[3]>thr_angle) and (angle_list[4]<thr_angle_s):gesture_str = "Rock'n'Roll"return gesture_strdef hand_detect():global qglobal kill_all_flagglobal cam_imgbye_flag = 0bye_time = time.time()hand_jugg = Nonegesture_str = Nonewhile True:time.sleep(0.1)while q==0:time.sleep(0.1)frame = cv2.cvtColor(cam_img, cv2.COLOR_BGR2RGB)results = hands.process(frame)if results.multi_handedness: for hand_label in results.multi_handedness:hand_jugg=str(hand_label).split('"')[1]+" Hand"print(hand_jugg)
# cv2.putText(faceImg,hand_jugg,(50,200),0,1.3,(0,0,255),2)if results.multi_hand_landmarks:for hand_landmarks in results.multi_hand_landmarks:
# mp_drawing.draw_landmarks(faceImg, hand_landmarks, mp_hands.HAND_CONNECTIONS)hand_local = []for i in range(21):x = hand_landmarks.landmark[i].x*frame.shape[1]y = hand_landmarks.landmark[i].y*frame.shape[0]hand_local.append((x,y))if hand_local:angle_list = hand_angle(hand_local)gesture_str = h_gesture(angle_list)print(gesture_str)
# cv2.putText(faceImg,gesture_str,(50,100),0,1.3,(0,0,255),2)if gesture_str == "Bye":if bye_flag == 0:bye_flag = 1elif bye_flag == 1 and time.time() - bye_time >= 3:kill_all_flag = 1q = 1print("Good-Bye")else:bye_flag = 1 else:Keyborad(hand_jugg,gesture_str)bye_flag = 0hand_jugg = Nonegesture_str = Noneif q == 1:breakif kill_all_flag == 1:breakreturn def track():global qglobal kill_all_flagglobal cam_imgglobal left_pointglobal right_pointwhile True:time.sleep(0.1)while q==0: time.sleep(0.05) gray = cv2.cvtColor(cam_img,cv2.COLOR_BGR2GRAY)faceRects = classifier.detectMultiScale(gray,scaleFactor=1.2,minNeighbors=3,minSize=(32, 32))if len(faceRects):x,y,w,h = faceRects[0]# 框选出人脸 最后一个参数2是框线宽度
# cv2.rectangle(faceImg,(x, y), (x + w, y + h), (0,255,0), 2)central_point = x+w/2 if central_point > left_point:print("Right")Mouse(1)elif central_point < right_point:print("Left")Mouse(2)else:Mouse(0)if q == 1:print("S")breakif kill_all_flag == 1:breakreturn def img_main():global qglobal kill_all_flagglobal cam_img thread_track = threading.Thread(target=track)thread_track.setDaemon(True)thread_track.start()thread_hand = threading.Thread(target=hand_detect)thread_hand.setDaemon(True)thread_hand.start() while True:time.sleep(0.1)while q==0:cam_img = cv2.flip(cap.read()[1],1)cv2.imshow("video_feed",cam_img)# 展示图像 if q == 1: # 通过esc键退出摄像q = 1print("暂停程序")cv2.destroyAllWindows()breakif cv2.waitKey(10) == 27:kill_all_flag = 1q = 1print("结束程序")cv2.destroyAllWindows()breakif kill_all_flag == 1:breakcap.release()print("全部退出")return def main():img_main() time.sleep(1)print("已退出所有程序")return if __name__ == "__main__": main()附录:列表的赋值类型和py打包
列表赋值
BUG复现
闲来无事写了个小程序 代码如下:
# -*- coding: utf-8 -*-
"""
Created on Fri Nov 19 19:47:01 2021@author: 16016
"""a_list = ['0','1','2','3','4','5','6','7','8','9','10','11','12','13','14','15']
#print(len(a_list))
#b_list = ['','','','','','','','','','','','','','','','']
c_list = [[],[],[],[],[],[],[],[],[],[],[],[],[],[],[],[]]
#for i in range(16):
if len(a_list):for j in range(16):a_list[j]=str(a_list[j])+'_'+str(j)print("序号:",j)print('a_list:\n',a_list)c_list[j]=a_listprint('c_list[0]:\n',c_list[0])print('\n')
# b_list[j]=a_list[7],a_list[8]
# print(b_list[j])# 写入到Excel:
#print(c_list,'\n')
我在程序中 做了一个16次的for循环 把列表a的每个值后面依次加上"_"和循环序号
比如循环第x次 就是把第x位加上_x 这一位变成x_x 我在输出测试中 列表a的每一次输出也是对的
循环16次后列表a应该变成[‘0_0’, ‘1_1’, ‘2_2’, ‘3_3’, ‘4_4’, ‘5_5’, ‘6_6’, ‘7_7’, ‘8_8’, ‘9_9’, ‘10_10’, ‘11_11’, ‘12_12’, ‘13_13’, ‘14_14’, ‘15_15’] 这也是对的
同时 我将每一次循环时列表a的值 写入到空列表c中 比如第x次循环 就是把更改以后的列表a的值 写入到列表c的第x位
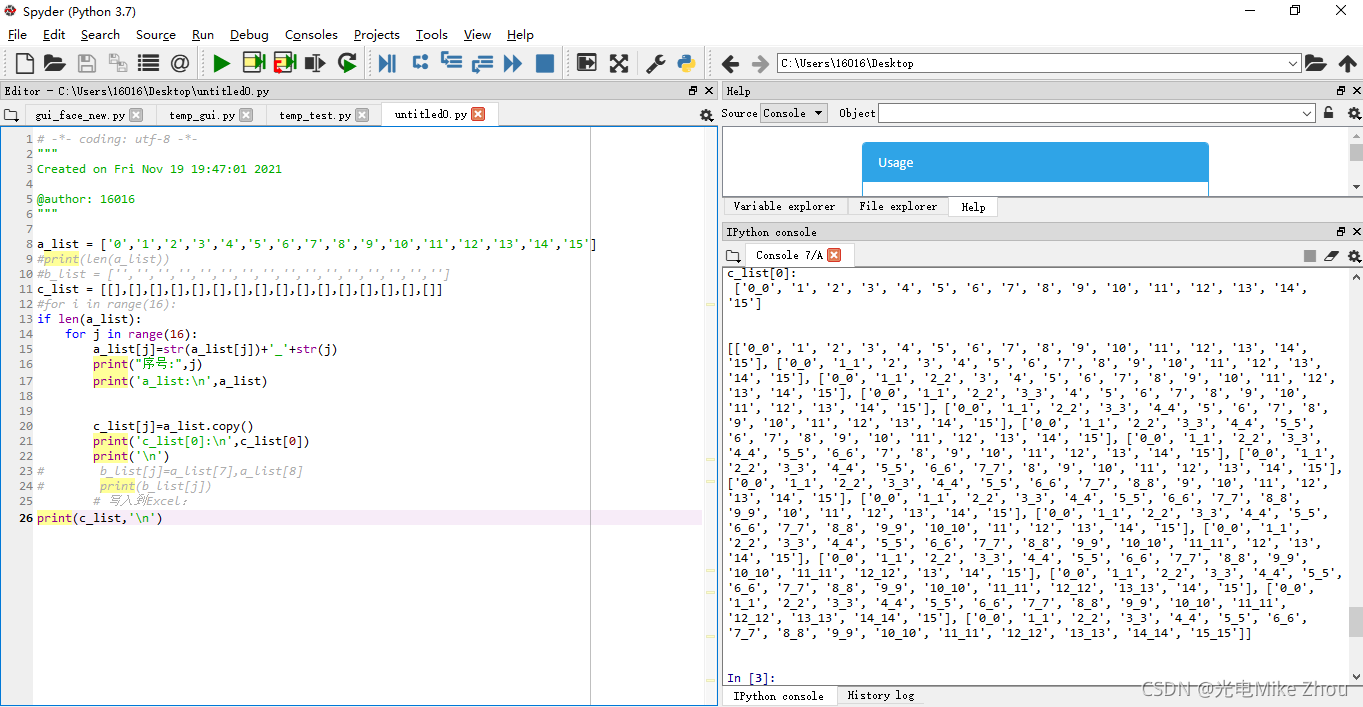
第0次循环后 c[0]的值应该是[‘0_0’, ‘1’, ‘2’, ‘3’, ‘4’, ‘5’, ‘6’, ‘7’, ‘8’, ‘9’, ‘10’, ‘11’, ‘12’, ‘13’, ‘14’, ‘15’] 这也是对的
但是在第1次循环以后 c[0]的值就一直在变 变成了c[x]的值
相当于把c_list[0]变成了c_list[1]…以此类推 最后得出的列表c的值也是每一项完全一样
我不明白这是怎么回事
我的c[0]只在第0次循环时被赋值了 但是后面它的值跟着在改变
如图:
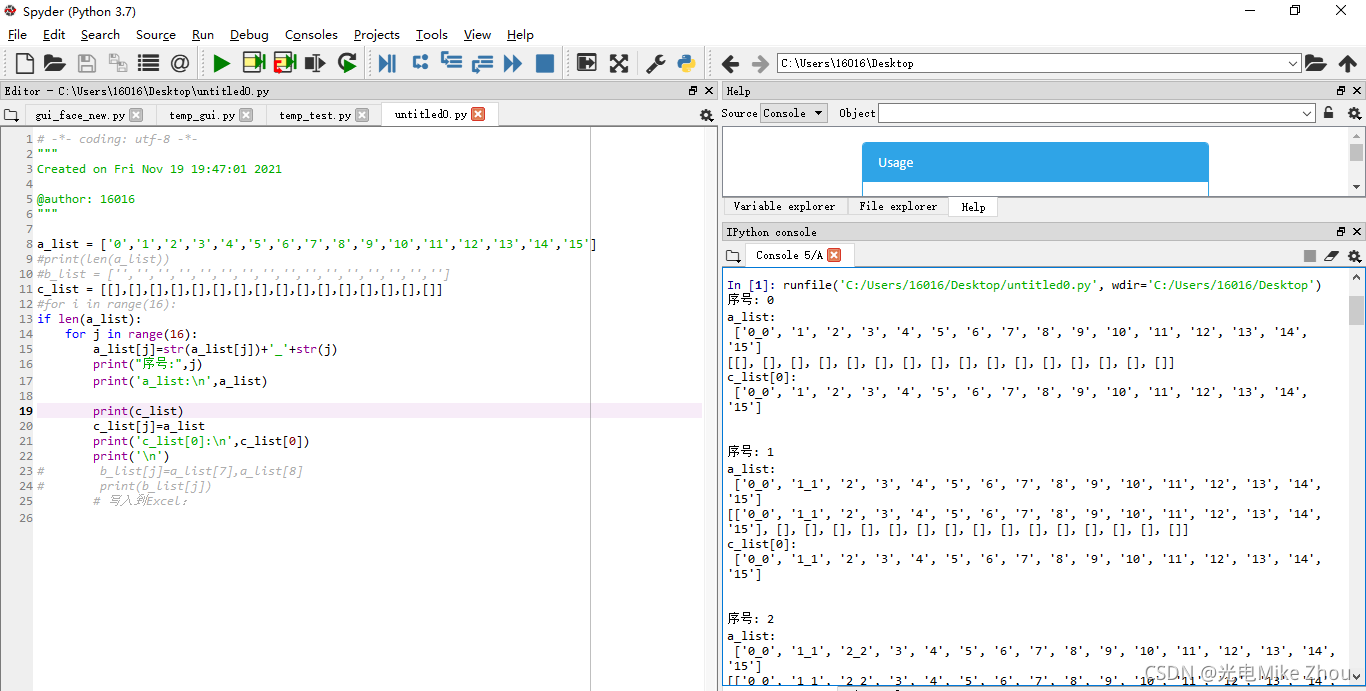
第一次老出bug 赋值以后 每次循环都改变c[0]的值 搞了半天都没搞出来
无论是用appen函数添加 还是用二维数组定义 或者增加第三个空数组来过渡 都无法解决
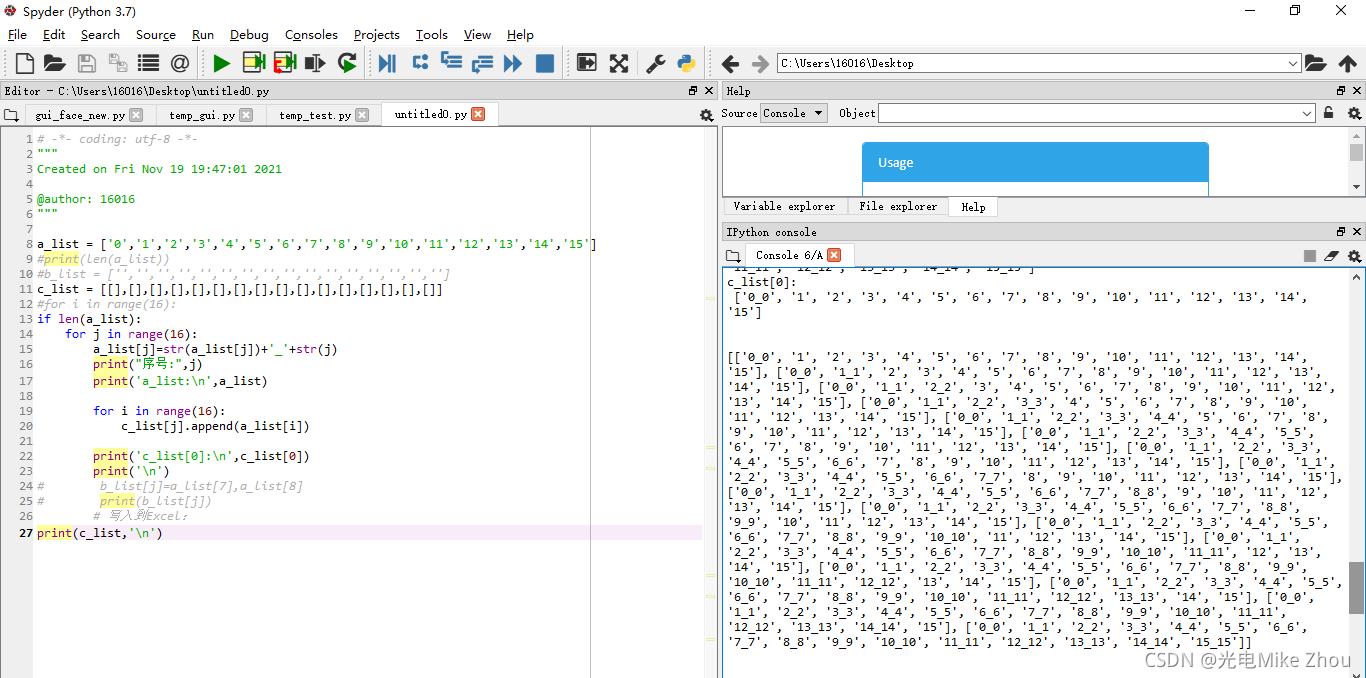
代码改进
后来在我华科同学的指导下 突然想到赋值可以赋的是个地址 地址里面的值一直变化 导致赋值也一直变化 于是用第二张图的循环套循环深度复制实现了
代码如下:
# -*- coding: utf-8 -*-
"""
Created on Fri Nov 19 19:47:01 2021@author: 16016
"""a_list = ['0','1','2','3','4','5','6','7','8','9','10','11','12','13','14','15']
#print(len(a_list))
#b_list = ['','','','','','','','','','','','','','','','']
c_list = [[],[],[],[],[],[],[],[],[],[],[],[],[],[],[],[]]
#for i in range(16):
if len(a_list):for j in range(16):a_list[j]=str(a_list[j])+'_'+str(j)print("序号:",j)print('a_list:\n',a_list)for i in range(16):c_list[j].append(a_list[i])print('c_list[0]:\n',c_list[0])print('\n')
# b_list[j]=a_list[7],a_list[8]
# print(b_list[j])# 写入到Excel:
print(c_list,'\n')
解决了问题
优化
第三次是请教了老师 用copy函数来赋真值
代码如下:
# -*- coding: utf-8 -*-
"""
Created on Fri Nov 19 19:47:01 2021@author: 16016
"""a_list = ['0','1','2','3','4','5','6','7','8','9','10','11','12','13','14','15']
#print(len(a_list))
#b_list = ['','','','','','','','','','','','','','','','']
c_list = [[],[],[],[],[],[],[],[],[],[],[],[],[],[],[],[]]
#for i in range(16):
if len(a_list):for j in range(16):a_list[j]=str(a_list[j])+'_'+str(j)print("序号:",j)print('a_list:\n',a_list)c_list[j]=a_list.copy()print('c_list[0]:\n',c_list[0])print('\n')
# b_list[j]=a_list[7],a_list[8]
# print(b_list[j])# 写入到Excel:
#print(c_list,'\n')
同样能解决问题
最后得出问题 就是指针惹的祸!
a_list指向的是个地址 而不是值 a_list[i]指向的才是单个的值 copy()函数也是复制值而不是地址
如果这个用C语言来写 就直观一些了 难怪C语言是基础 光学Python不学C 遇到这样的问题就解决不了
C语言yyds Python是什么垃圾弱智语言
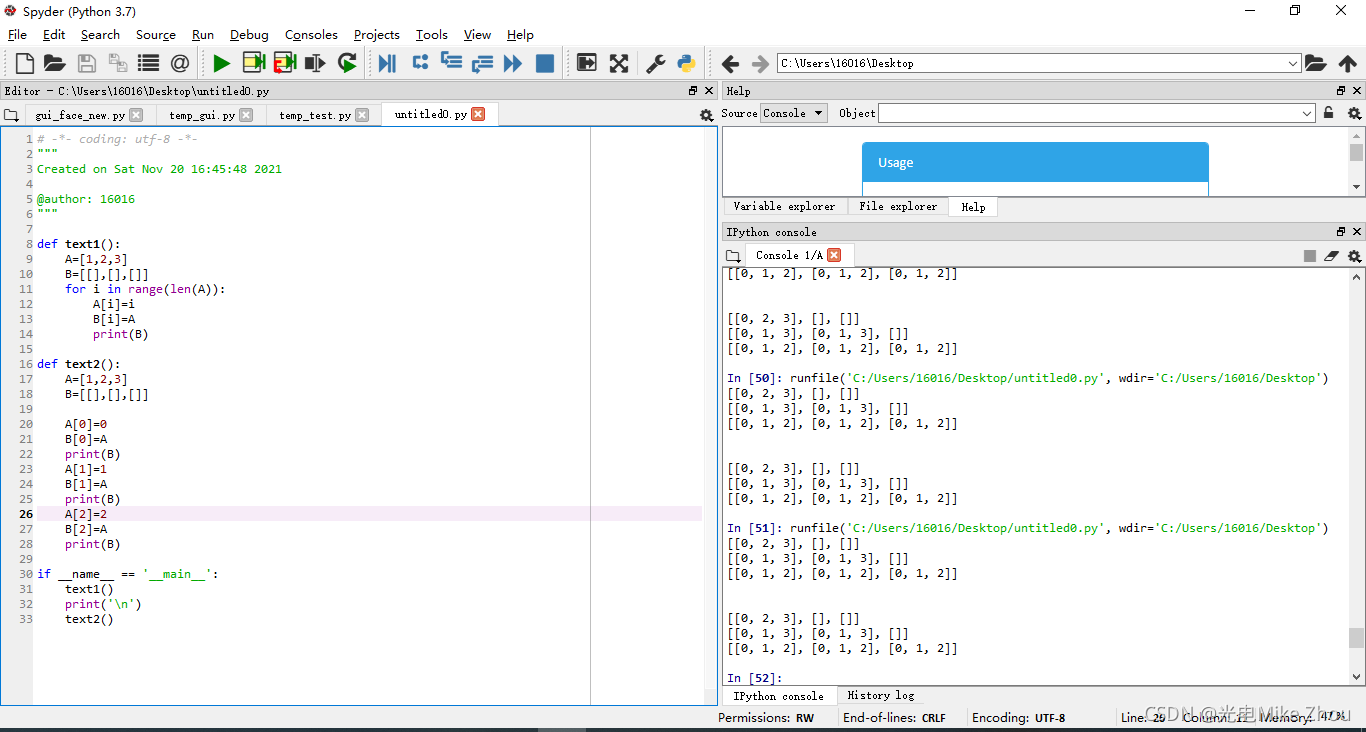
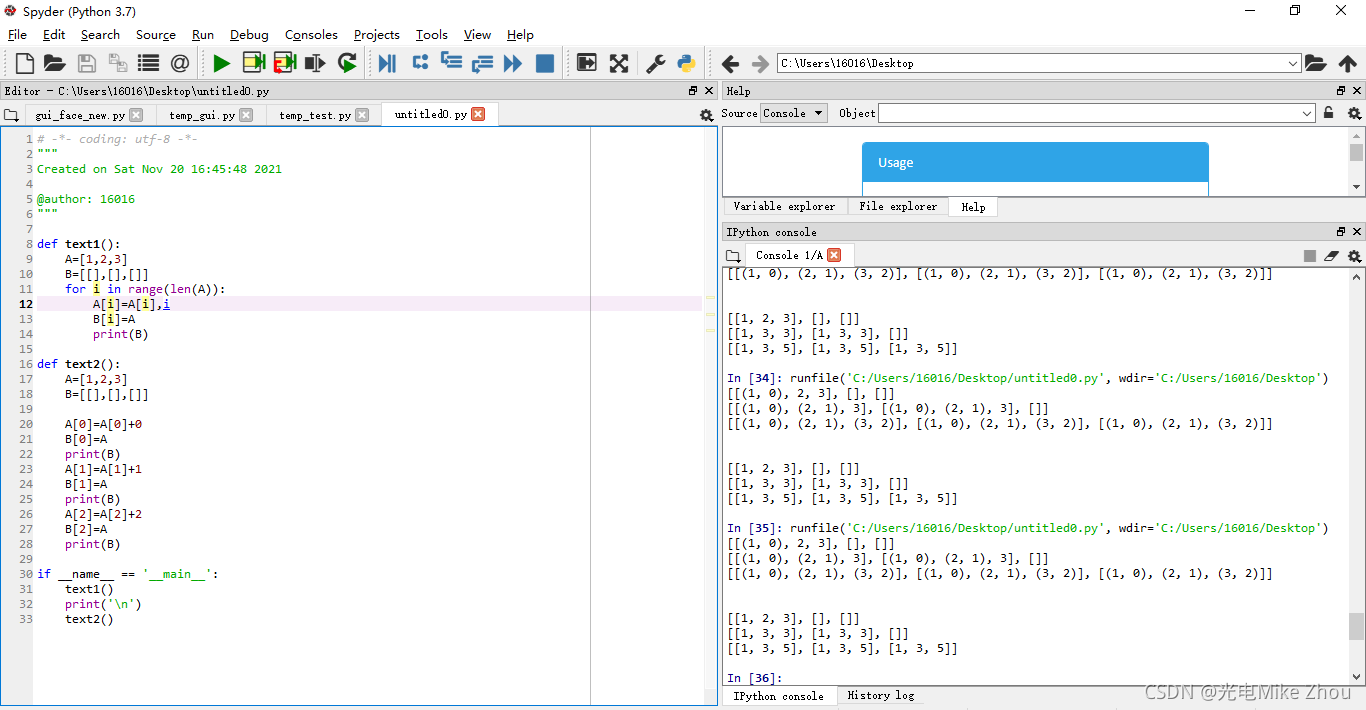
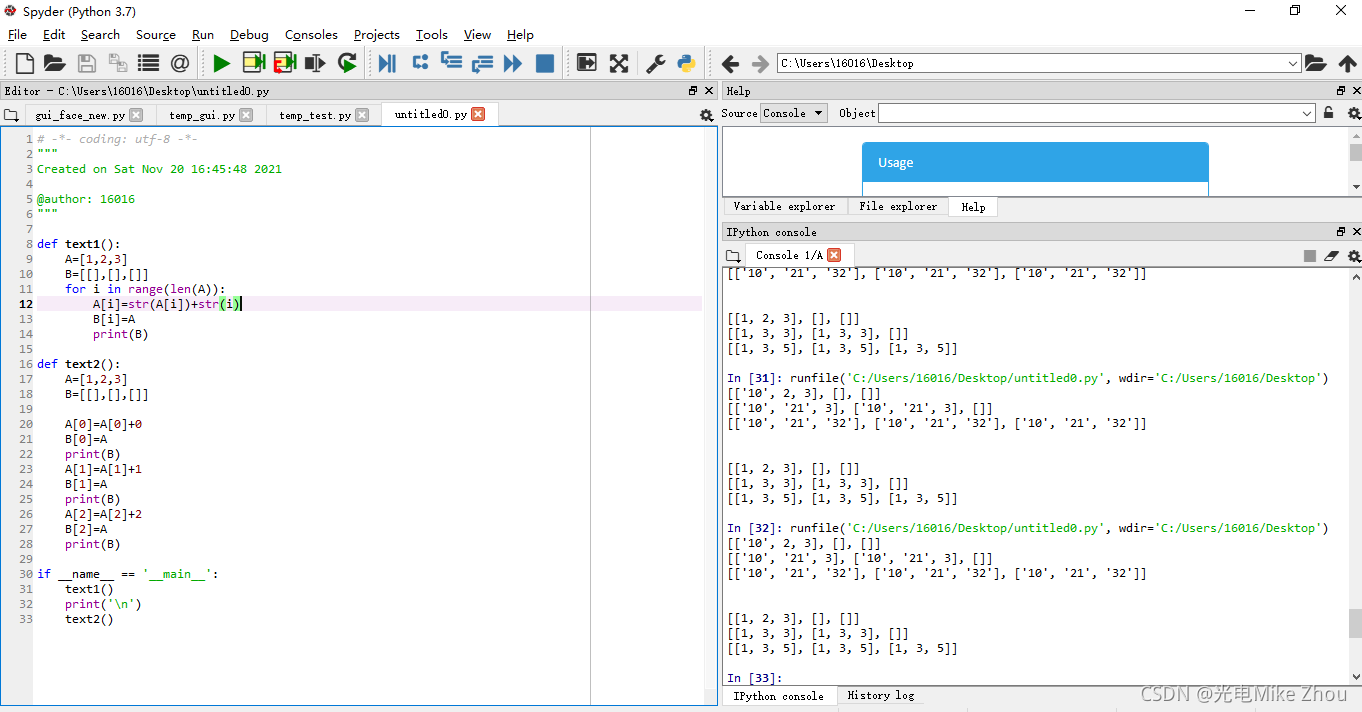
总结
由于Python无法单独定义一个值为指针或者独立的值 所以只能用列表来传送
只要赋值是指向一个列表整体的 那么就是指向的一个指针内存地址 解决方法只有一个 那就是将每个值深度复制赋值(子列表内的元素提取出来重新依次连接) 或者用copy函数单独赋值
如图测试:

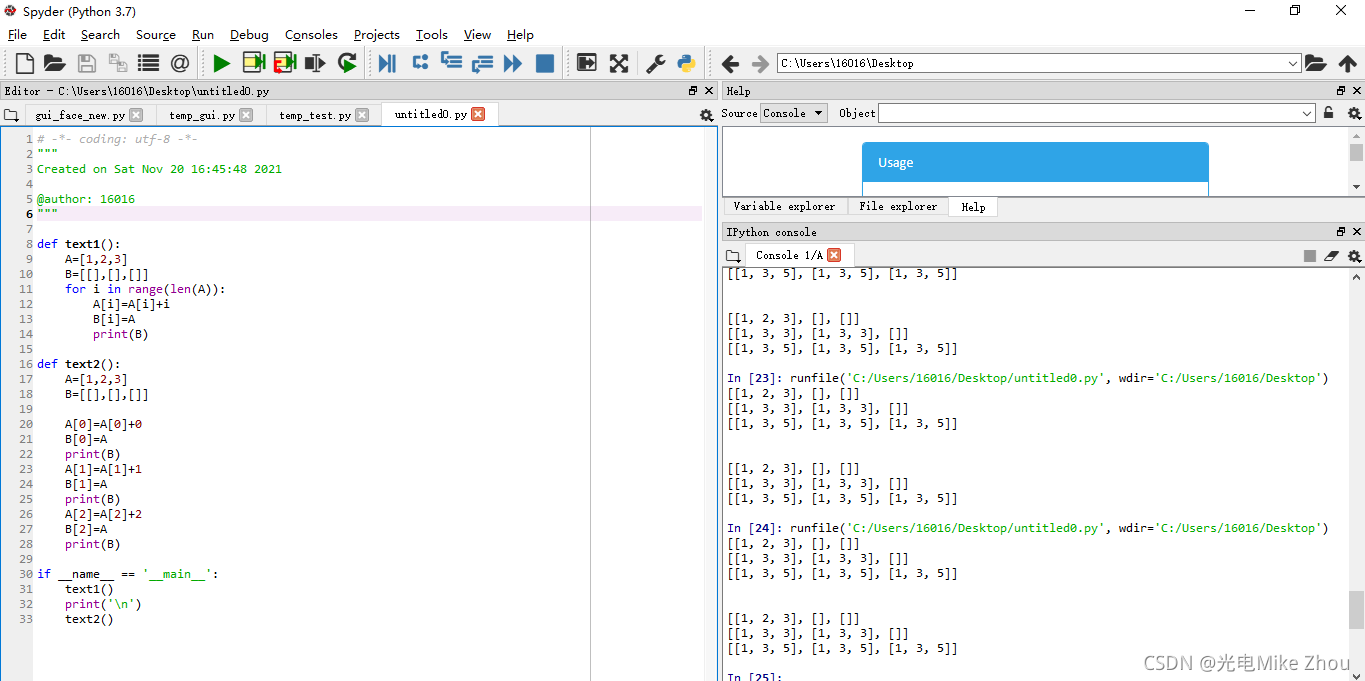
部分代码:
# -*- coding: utf-8 -*-
"""
Created on Sat Nov 20 16:45:48 2021@author: 16016
"""def text1():A=[1,2,3]B=[[],[],[]]for i in range(len(A)):A[i]=A[i]+iB[i]=Aprint(B)def text2():A=[1,2,3]B=[[],[],[]]A[0]=A[0]+0B[0]=Aprint(B)A[1]=A[1]+1B[1]=Aprint(B)A[2]=A[2]+2B[2]=Aprint(B)if __name__ == '__main__':text1()print('\n')text2()
py打包
Pyinstaller打包exe(包括打包资源文件 绝不出错版)
依赖包及其对应的版本号
PyQt5 5.10.1
PyQt5-Qt5 5.15.2
PyQt5-sip 12.9.0
pyinstaller 4.5.1
pyinstaller-hooks-contrib 2021.3
Pyinstaller -F setup.py 打包exe
Pyinstaller -F -w setup.py 不带控制台的打包
Pyinstaller -F -i xx.ico setup.py 打包指定exe图标打包
打包exe参数说明:
-F:打包后只生成单个exe格式文件;
-D:默认选项,创建一个目录,包含exe文件以及大量依赖文件;
-c:默认选项,使用控制台(就是类似cmd的黑框);
-w:不使用控制台;
-p:添加搜索路径,让其找到对应的库;
-i:改变生成程序的icon图标。
如果要打包资源文件
则需要对代码中的路径进行转换处理
另外要注意的是 如果要打包资源文件 则py程序里面的路径要从./xxx/yy换成xxx/yy 并且进行路径转换
但如果不打包资源文件的话 最好路径还是用作./xxx/yy 并且不进行路径转换
def get_resource_path(relative_path):if hasattr(sys, '_MEIPASS'):return os.path.join(sys._MEIPASS, relative_path)return os.path.join(os.path.abspath("."), relative_path)而后再spec文件中的datas部分加入目录
如:
a = Analysis(['cxk.py'],pathex=['D:\\Python Test\\cxk'],binaries=[],datas=[('root','root')],hiddenimports=[],hookspath=[],hooksconfig={},runtime_hooks=[],excludes=[],win_no_prefer_redirects=False,win_private_assemblies=False,cipher=block_cipher,noarchive=False)
而后直接Pyinstaller -F setup.spec即可
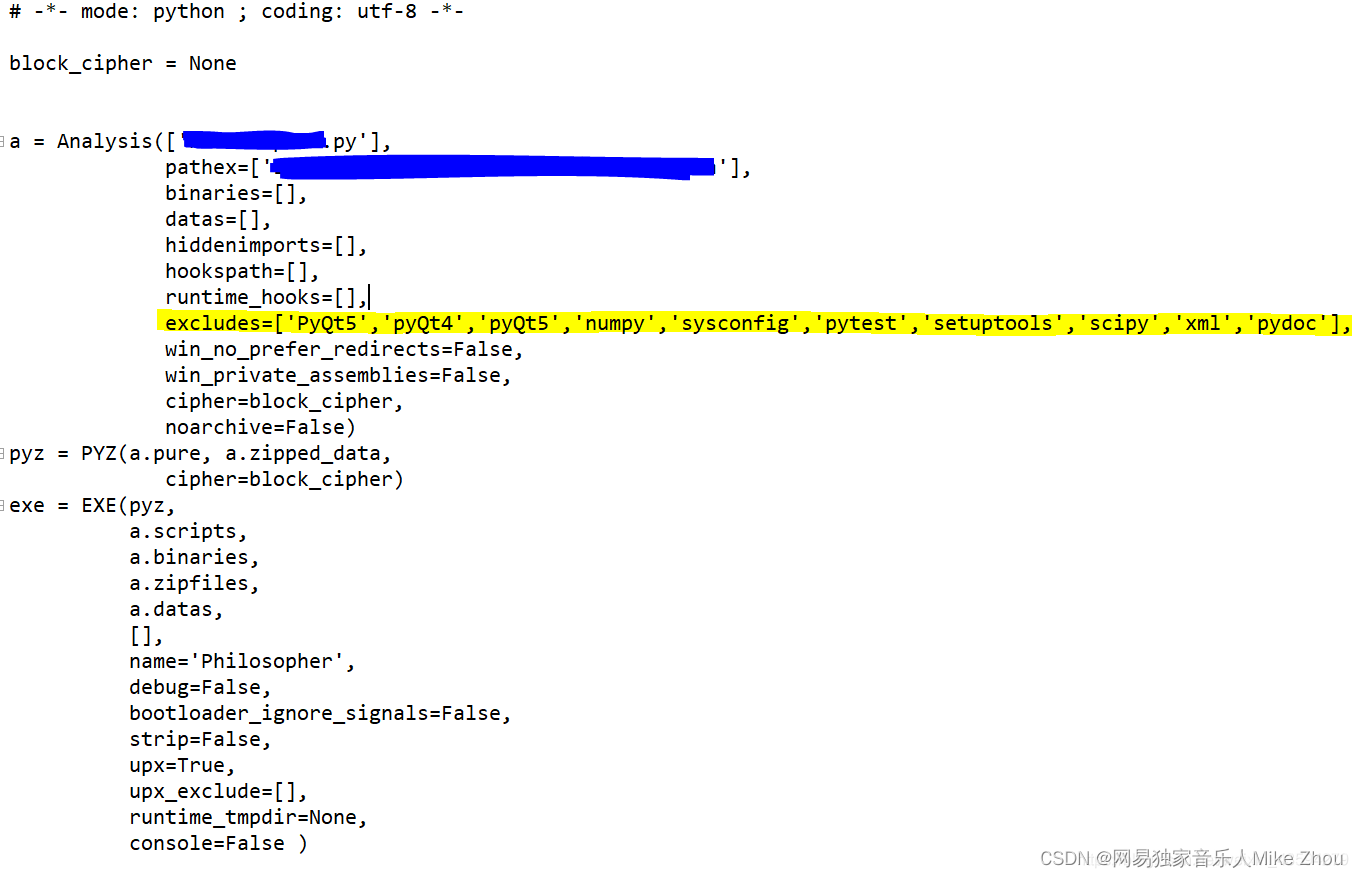
如果打包的文件过大则更改spec文件中的excludes 把不需要的库写进去(但是已经在环境中安装了的)就行
这些不要了的库在上一次编译时的shell里面输出
比如:
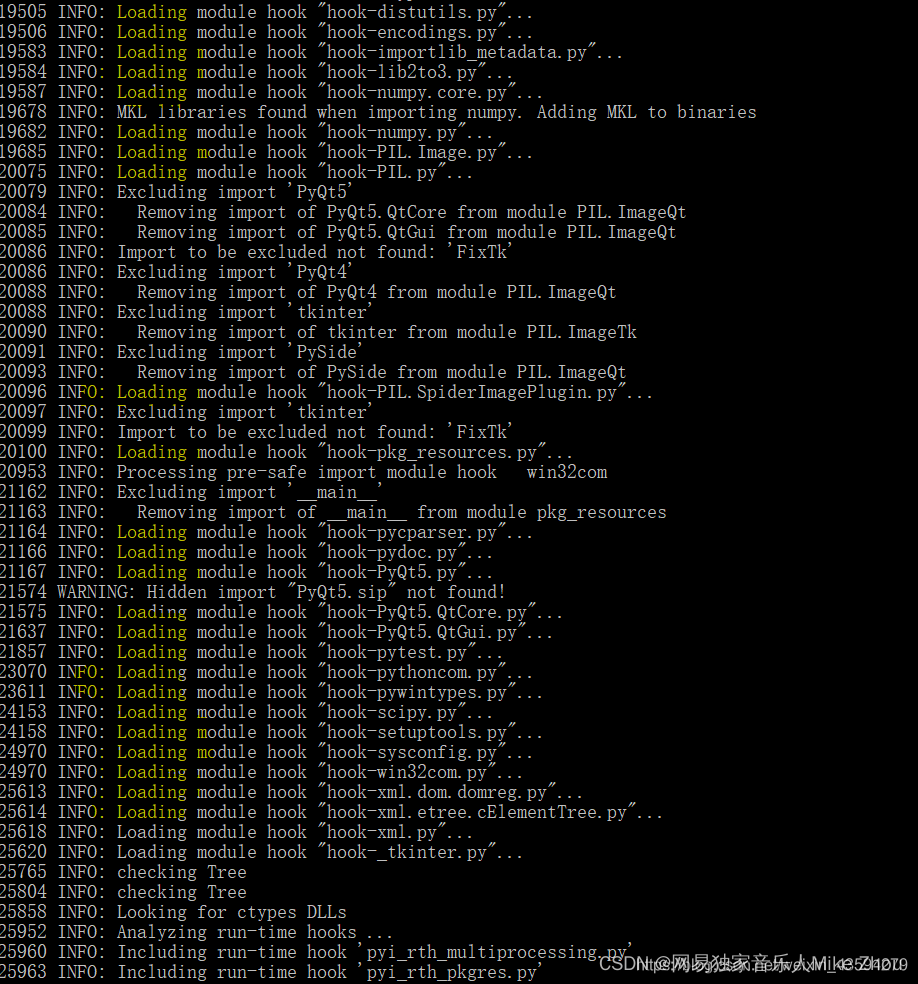
然后用pyinstaller --clean -F 某某.spec
相关文章:
【Python】基于OpenCV人脸追踪、手势识别控制的求生之路FPS游戏操作
【Python】基于OpenCV人脸追踪、手势识别控制的求生之路FPS游戏操作 文章目录 手势识别人脸追踪键盘控制整体代码附录:列表的赋值类型和py打包列表赋值BUG复现代码改进优化总结 py打包 视频: 基于OpenCV人脸追踪、手势识别控制的求实之路FPS游戏操作 手…...
约束优化算法(optimtool.constrain)
import optimtool as oo from optimtool.base import np, sp, pltpip install optimtool>2.4.2约束优化算法(optimtool.constrain) import optimtool.constrain as oc oc.[方法名].[函数名]([目标函数], [参数表], [等式约束表], [不等式约数表], [初…...
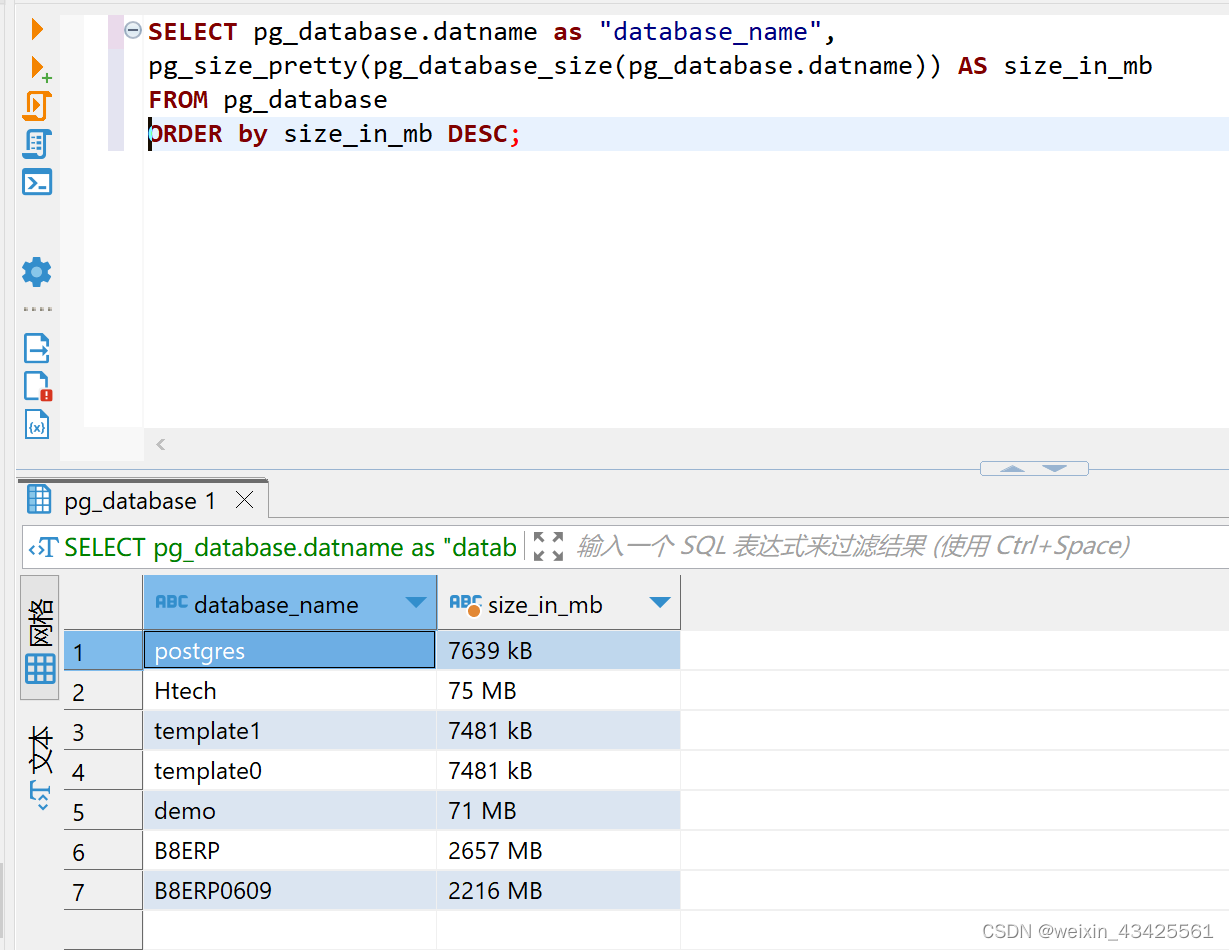
如何查看postgresql中的数据库大小?
你可以使用以下命令来查看PostgreSQL数据库的大小: SELECT pg_database.datname as "database_name", pg_size_pretty(pg_database_size(pg_database.datname)) AS size_in_mb FROM pg_database ORDER by size_in_mb DESC;这将返回一个表格࿰…...
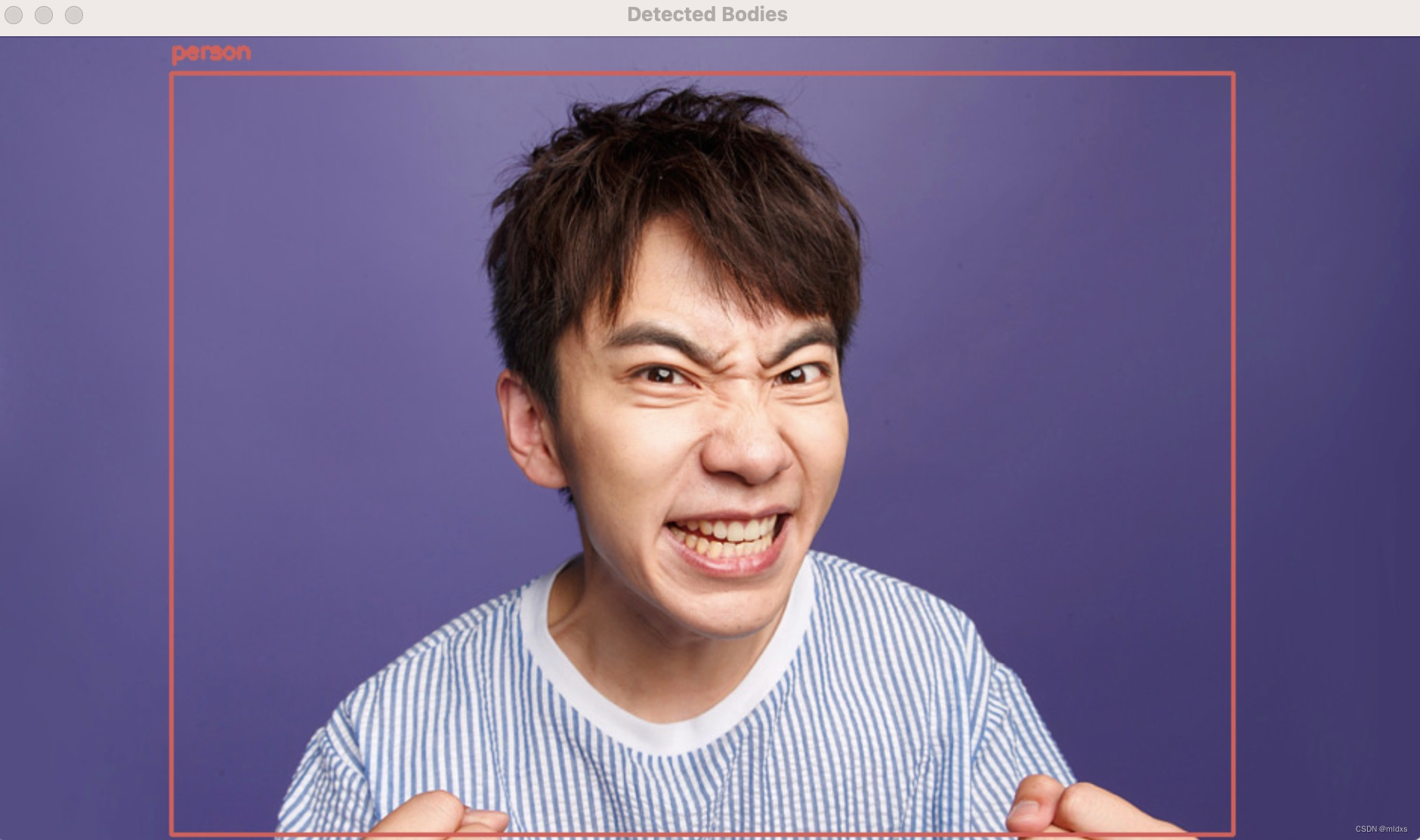
使用python-opencv检测图片中的人像
最简单的方法进行图片中的人像检测 使用python-opencv配合yolov3模型进行图片中的人像检测 1、安装python-opencv、numpy pip install opencv-python pip install numpy 2、下载yolo模型文件和配置文件: 下载地址: https://download.csdn.net/down…...

项目进展(三)-电机驱动起来了,发现了很多关键点,也遇到了一些低级错误,
一、前言 昨天电机没有驱动起来,头发掉一堆,不过今天,终于终于终于把电机驱动起来了!!!!,特别开心,哈哈哈哈,后续继续努力完善!!&…...
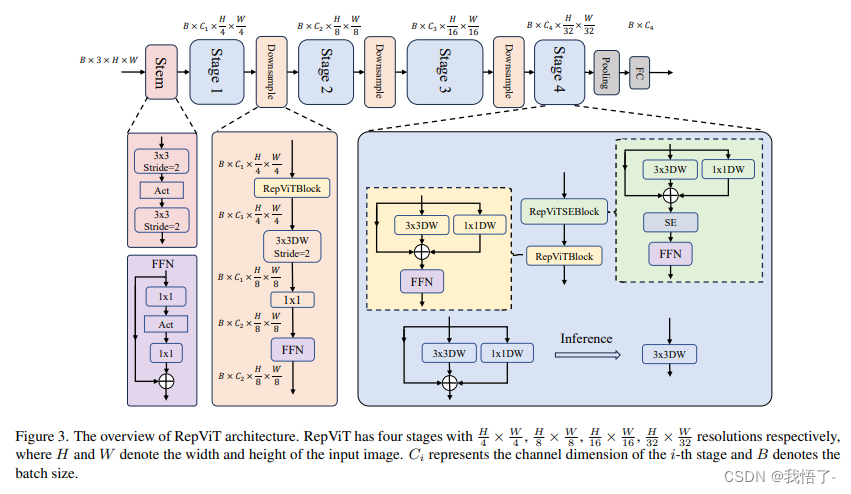
目标检测算法改进系列之Backbone替换为RepViT
RepViT简介 轻量级模型研究一直是计算机视觉任务中的一个焦点,其目标是在降低计算成本的同时达到优秀的性能。轻量级模型与资源受限的移动设备尤其相关,使得视觉模型的边缘部署成为可能。在过去十年中,研究人员主要关注轻量级卷积神经网络&a…...

学习 Kubernetes的难点和安排
Kubernetes 技术栈的特点可以用四个字来概括,那就是“新、广、杂、深”: 1.“新”是指 Kubernetes 用到的基本上都是比较前沿、陌生的技术,而且版本升级很快,经常变来变去。 2.“广”是指 Kubernetes 涉及的应用领域很多、覆盖面非…...

【MATLAB源码-第42期】基于matlab的人民币面额识别系统(GUI)。
操作环境: MATLAB 2022a 1、算法描述 基于 MATLAB 的人民币面额识别系统设计可以分为以下步骤: 1. 数据收集与预处理 数据收集: 收集不同面额的人民币照片,如 1 元、5 元、10 元、20 元、50 元和 100 元。确保在不同环境、不…...
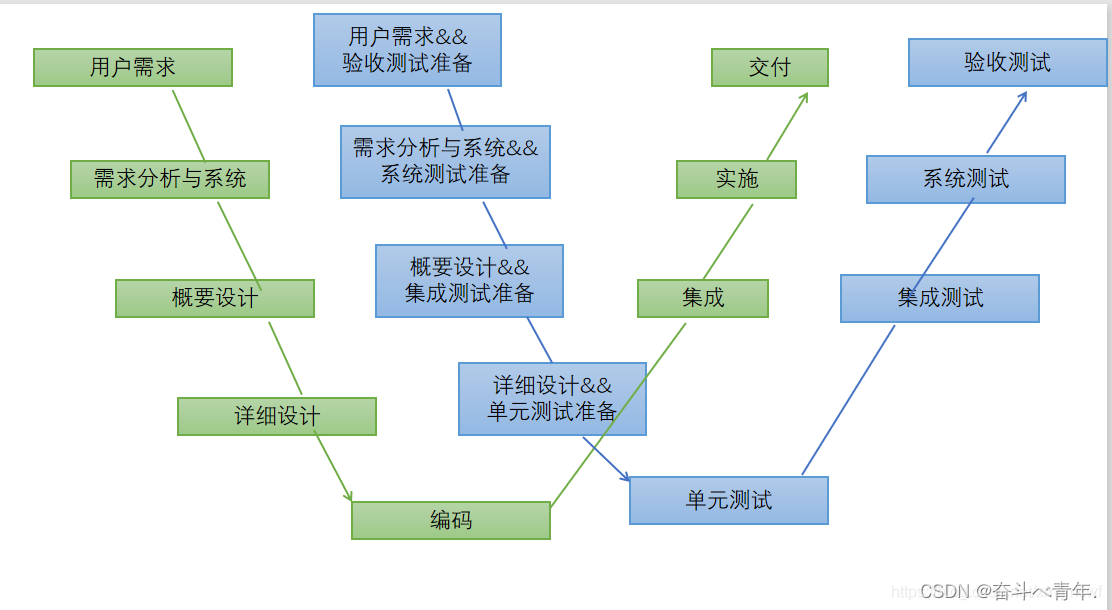
【软件测试】软件测试的基础概念
一、一个优秀的测试人员需要具备的素质 技能方面: 优秀的测试用例设计能力:测试用例设计能力是指,无论对于什么类型的测试,都能够设计出高效的发现缺陷,保证产品质量的优秀测试用例。这就需要我们掌握设计测试用例的方…...
Docker-mysql,redis安装
安装MySQL 下载MySQL镜像 终端运行命令 docker pull mysql:8.0.29镜像下载完成后,需要配置持久化数据到本地 这是mysql的配置文件和存储数据用的目录 切换到终端,输入命令,第一次启动MySQL容器 docker run --restartalways --name mysq…...

五种I/O模型
目录 1、阻塞IO模型2、非阻塞IO模型3、IO多路复用模型4、信号驱动IO模型5、异步IO模型总结 blockingIO - 阻塞IOnonblockingIO - 非阻塞IOIOmultiplexing - IO多路复用signaldrivenIO - 信号驱动IOasynchronousIO - 异步IO 5种模型的前4种模型为同步IO,只有异步IO模…...

用nativescript开发ios程序常用命令?
NativeScript是一个用于跨平台移动应用程序开发的开源框架,允许您使用JavaScript或TypeScript构建原生iOS和Android应用程序。以下是一些常用的NativeScript命令,用于开发iOS应用程序: 1、创建新NativeScript项目: tns create m…...
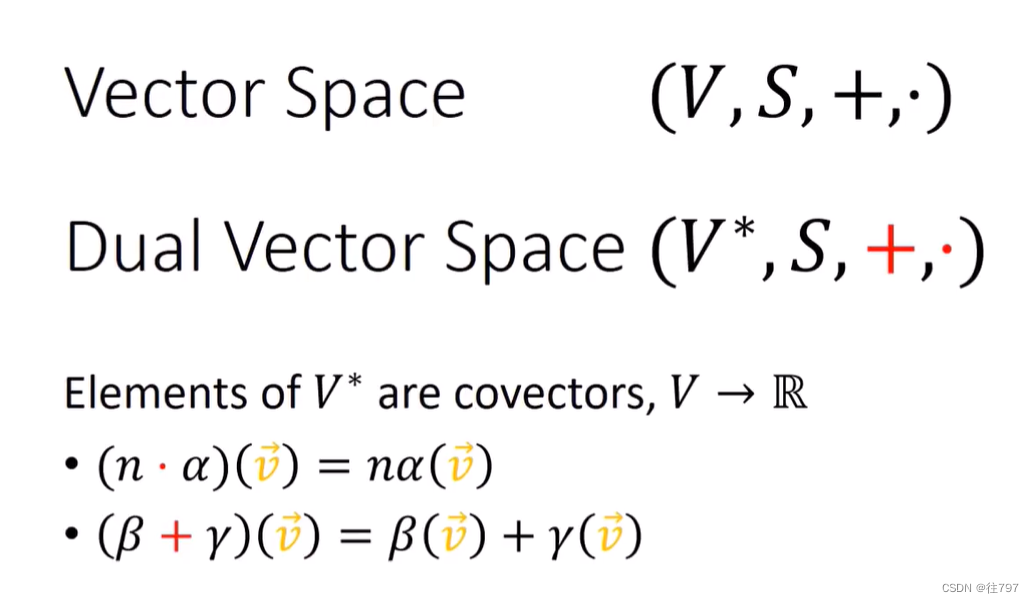
6.Tensors For Beginners-What are Convector
Covectors (协向量) What‘s a covector Covectors are “basically” Row Vectors 在一定程度上,可认为 协向量 基本上就像 行向量。 但不能简单地认为 这就是列向量进行转置! 行向量 和 列向量 是根本不同类型的对象。 …...
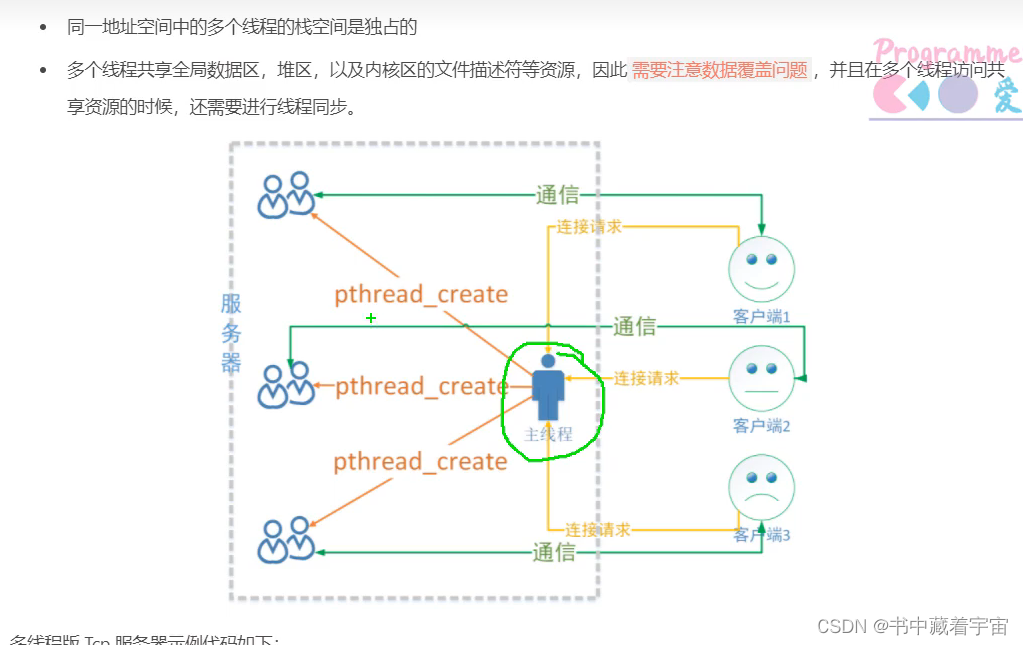
Linux多线程网络通信
思路:主线程(只有一个)建立连接,就创建子线程。子线程开始通信。 共享资源:全局数据区,堆区,内核区描述符。 线程同步不同步需要取决于线程对共享资源区的数据的操作,如果是只读就不…...

矩阵的c++实现(2)
上一次我们了解了矩阵的运算和如何使用矩阵解决斐波那契数列,这一次我们多看看例题,了解什么情况下用矩阵比较合适。 先看例题 1.洛谷P1939 【模板】矩阵加速(数列) 模板题应该很简单。 补:1<n<10^9 10^9肯定…...

RPC 框架之Thrift入门(一)
📋 个人简介 💖 作者简介:大家好,我是阿牛,全栈领域优质创作者。😜📝 个人主页:馆主阿牛🔥🎉 支持我:点赞👍收藏⭐️留言Ὅ…...
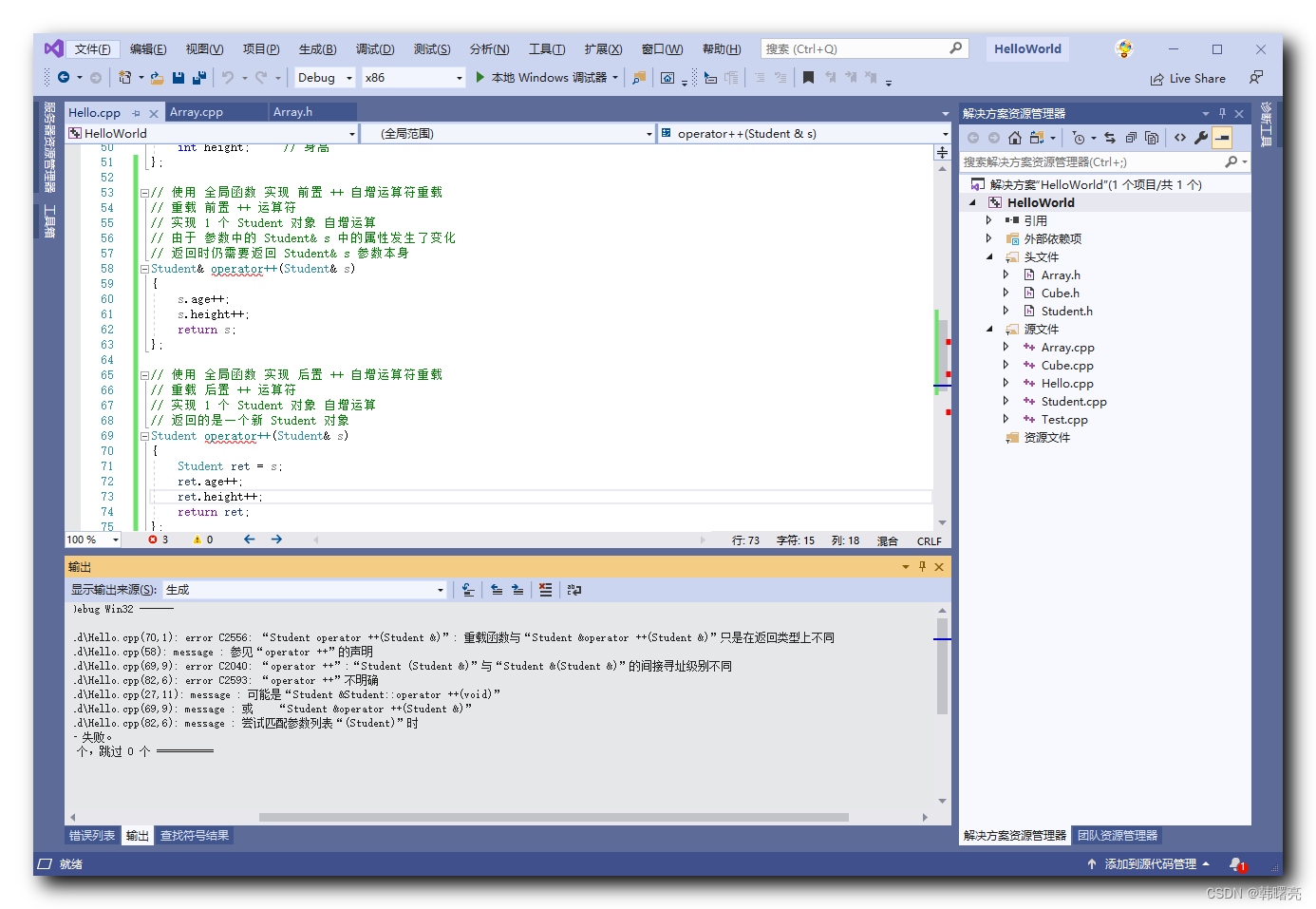
【C++】运算符重载 ⑥ ( 一元运算符重载 | 后置运算符重载 | 前置运算符重载 与 后置运算符重载 的区别 | 后置运算符重载添加 int 占位参数 )
文章目录 一、后置运算符重载1、前置运算符重载 与 后置运算符重载 的区别2、后置运算符重载添加 int 占位参数 上 2 2 2 篇博客 【C】运算符重载 ④ ( 一元运算符重载 | 使用 全局函数 实现 前置 自增运算符重载 | 使用 全局函数 实现 前置 - - 自减运算符重载 )【C】运算符…...

538. 把二叉搜索树转换为累加树
题目描述 给出二叉 搜索 树的根节点,该树的节点值各不相同,请你将其转换为累加树(Greater Sum Tree),使每个节点 node 的新值等于原树中大于或等于 node.val 的值之和。 提醒一下,二叉搜索树满足下列约束…...

java8日期时间工具类
【README】 1)本文总结了java8中日期时间常用工具方法;包括: 日期时间对象格式化为字符串;日期时间字符串解析为日期时间对象;日期时间对象转换; 转换过程中,需要注意的是: Instan…...

算法-动态规划/trie树-单词拆分
算法-动态规划/trie树-单词拆分 1 题目概述 1.1 题目出处 https://leetcode.cn/problems/word-break/description/?envTypestudy-plan-v2&envIdtop-interview-150 1.2 题目描述 2 动态规划 2.1 解题思路 dp[i]表示[0, i)字符串可否构建那么dp[i]可构建的条件是&…...

如何用录播姬BililiveRecorder轻松修复损坏的直播录制文件?3步快速解决方案
如何用录播姬BililiveRecorder轻松修复损坏的直播录制文件?3步快速解决方案 【免费下载链接】BililiveRecorder 录播姬 | mikufans 生放送录制 项目地址: https://gitcode.com/gh_mirrors/bi/BililiveRecorder 录播姬BililiveRecorder是一款专业的B站直播录制…...

AI提示词极限赛:突破边界的艺术
好的,这是一份关于AI提示词极限赛的技术文章大纲:标题: 突破边界:AI提示词极限赛的技术深度解析与实战策略摘要: 探讨AI提示词极限赛的核心技术要点、优化策略与评估方法,助力参赛者提升提示词设计能力。关…...

Visual C++运行库一键修复:3分钟解决Windows软件启动失败的终极方案
Visual C运行库一键修复:3分钟解决Windows软件启动失败的终极方案 【免费下载链接】vcredist AIO Repack for latest Microsoft Visual C Redistributable Runtimes 项目地址: https://gitcode.com/gh_mirrors/vc/vcredist 你是否曾经兴奋地双击一个游戏或专…...

Vim/Neovim集成AI编程助手Neural:提升开发效率的本地化实践
1. 项目概述:在Vim/Neovim中集成AI编程助手 如果你和我一样,是个常年泡在终端和编辑器里的开发者,那你肯定对Vim或Neovim有着特殊的感情。它们高效、可定制,几乎成了我们思维的外延。但有时候,面对一些重复性的代码模…...
ANLI计算结果才准确)
避开这3个坑,你的夜间灯光数据(NPP/VIIRS)ANLI计算结果才准确
避开这3个坑,你的夜间灯光数据(NPP/VIIRS)ANLI计算结果才准确 深夜的城市灯光如同流动的星河,而NPP/VIIRS卫星捕捉的这些光点正成为区域经济研究的"新货币"。但当我第一次用ArcGIS计算昆明各区县的平均灯光指数&#x…...

Shannon 没有想到的事——当信息论遇上有限算力
从一个日常经验开始你有没有过这种体验——打开一本教科书,前三页还能跟上,到第四页突然看不懂了。每个字你都认识,但连在一起就变成了噪音。你翻回去重读,还是不行。于是你合上书,换了一本"入门版"…...

终极解放!淘宝自动任务神器让你每天多出30分钟自由时间
终极解放!淘宝自动任务神器让你每天多出30分钟自由时间 【免费下载链接】taojinbi 淘宝淘金币自动执行脚本,包含蚂蚁森林收取能量,芭芭农场全任务,解放你的双手 项目地址: https://gitcode.com/gh_mirrors/ta/taojinbi 你知…...

如何用Tuna插件在OBS中实现专业级音乐信息显示:5分钟快速配置指南
如何用Tuna插件在OBS中实现专业级音乐信息显示:5分钟快速配置指南 【免费下载链接】tuna Song information plugin for obs-studio 项目地址: https://gitcode.com/gh_mirrors/tuna1/tuna 想要让直播观众实时了解你正在播放的歌曲信息吗?Tuna插件…...

COSI-Corr安装指南:从零到一,轻松集成ENVI环境
1. COSI-Corr是什么?为什么需要它? 如果你正在处理遥感影像数据,特别是需要测量地表形变的话,COSI-Corr绝对是你工具箱里不可或缺的利器。这个由加州理工学院开发的软件,专门用于从光学卫星和航空影像中提取地面形变信…...
)
仅限首批GA客户开放!Gemini Advanced for Workspace隐藏API接口曝光(含/alpha/v2beta1/insights endpoints调用凭证获取路径)
更多请点击: https://intelliparadigm.com 第一章:Gemini Advanced for Workspace隐藏API的GA权限边界与合规性初探 Gemini Advanced for Workspace(GAWS)虽未正式开放全部后端接口文档,但通过网络流量分析与OAuth 2.…...