ArduPilot开源飞控之AP_Baro_DroneCAN
ArduPilot开源飞控之AP_Baro_DroneCAN
- 1. 源由
- 2. back-end抽象类
- 3. 方法实现
- 3.1 probe
- 3.2 update
- 3.3 subscribe_msgs
- 3.4 handle_pressure/handle_temperature
- 3.5 CAN port
- 4. 参考资料
1. 源由
鉴于ArduPilot开源飞控之AP_Baro中涉及Sensor Driver有以下总线类型:
- I2C
- Serial UART
- CAN
- SITL //模拟传感器(暂时并列放在这里)
ArduPilot之开源代码Sensor Drivers设计的front-end / back-end分层设计思路,AP_Baro主要描述的是front-end。
为了更好的从整体理解气压计这个传感器的嵌入式应用,这里深入到back-end驱动层,针对基于CAN协议的气压计设备,进行一个研读和理解。
2. back-end抽象类
AP_Baro_Backend驱动层需实现方法:
- void update()
- static AP_Baro_Backend *probe(AP_Baro &baro, AP_HAL::OwnPtr<AP_HAL::Device> dev)
注:通常来说使用ChibiOS的都有定时器,如果没有定时器,可以使用void accumulate(void)来实现传感器的数据定时获取。
class AP_Baro_Backend
{
public:AP_Baro_Backend(AP_Baro &baro);virtual ~AP_Baro_Backend(void) {};// each driver must provide an update method to copy accumulated// data to the frontendvirtual void update() = 0;// accumulate function. This is used for backends that don't use a// timer, and need to be called regularly by the main code to// trigger them to read the sensorvirtual void accumulate(void) {}void backend_update(uint8_t instance);// Check that the baro valid by using a mean filter.// If the value further that filtrer_range from mean value, it is rejected.bool pressure_ok(float press);uint32_t get_error_count() const { return _error_count; }#if AP_BARO_MSP_ENABLEDvirtual void handle_msp(const MSP::msp_baro_data_message_t &pkt) {}
#endif#if AP_BARO_EXTERNALAHRS_ENABLEDvirtual void handle_external(const AP_ExternalAHRS::baro_data_message_t &pkt) {}
#endif/*device driver IDs. These are used to fill in the devtype fieldof the device ID, which shows up as BARO_DEVID* parameters tousers.*/enum DevTypes {DEVTYPE_BARO_SITL = 0x01,DEVTYPE_BARO_BMP085 = 0x02,DEVTYPE_BARO_BMP280 = 0x03,DEVTYPE_BARO_BMP388 = 0x04,DEVTYPE_BARO_DPS280 = 0x05,DEVTYPE_BARO_DPS310 = 0x06,DEVTYPE_BARO_FBM320 = 0x07,DEVTYPE_BARO_ICM20789 = 0x08,DEVTYPE_BARO_KELLERLD = 0x09,DEVTYPE_BARO_LPS2XH = 0x0A,DEVTYPE_BARO_MS5611 = 0x0B,DEVTYPE_BARO_SPL06 = 0x0C,DEVTYPE_BARO_UAVCAN = 0x0D,DEVTYPE_BARO_MSP = 0x0E,DEVTYPE_BARO_ICP101XX = 0x0F,DEVTYPE_BARO_ICP201XX = 0x10,DEVTYPE_BARO_MS5607 = 0x11,DEVTYPE_BARO_MS5837 = 0x12,DEVTYPE_BARO_MS5637 = 0x13,DEVTYPE_BARO_BMP390 = 0x14,};protected:// reference to frontend objectAP_Baro &_frontend;void _copy_to_frontend(uint8_t instance, float pressure, float temperature);// semaphore for access to shared frontend dataHAL_Semaphore _sem;virtual void update_healthy_flag(uint8_t instance);// mean pressure for range filterfloat _mean_pressure; // number of dropped samples. Not used for now, but can be usable to choose more reliable sensoruint32_t _error_count;// set bus ID of this instance, for BARO_DEVID parametersvoid set_bus_id(uint8_t instance, uint32_t id) {_frontend.sensors[instance].bus_id.set(int32_t(id));}
};
3. 方法实现
由于气压数据来自CAN总线,因此,其逻辑与MSP协议类似,相对简单,没有校准等复杂物理公式。
3.1 probe
实例初始化。
AP_Baro_DroneCAN::probe├──> WITH_SEMAPHORE(_sem_registry);├──> AP_Baro_DroneCAN* backend = nullptr;│├──> <for (uint8_t i = 0; i < BARO_MAX_DRIVERS; i++)>│ └──> <_detected_modules[i].driver == nullptr && _detected_modules[i].ap_dronecan != nullptr>│ ││ │ /********************************************************************************│ │ * Registered DroneCAN Baro Node *│ │ ********************************************************************************/│ ├──> backend = new AP_Baro_DroneCAN(baro);│ ├──> <backend == nullptr>│ │ └──> AP::can().log_text(AP_CANManager::LOG_ERROR,LOG_TAG,│ │ "Failed register DroneCAN Baro Node %d on Bus %d\n",│ │ _detected_modules[i].node_id,│ │ _detected_modules[i].ap_dronecan->get_driver_index());│ ├──> <else>│ │ ├──> _detected_modules[i].driver = backend;│ │ ├──> backend->_pressure = 0;│ │ ├──> backend->_pressure_count = 0;│ │ ├──> backend->_ap_dronecan = _detected_modules[i].ap_dronecan;│ │ ├──> backend->_node_id = _detected_modules[i].node_id;│ │ ├──> backend->_instance = backend->_frontend.register_sensor();│ │ ├──> backend->set_bus_id(backend->_instance, AP_HAL::Device::make_bus_id(AP_HAL::Device::BUS_TYPE_UAVCAN,│ │ │ _detected_modules[i].ap_dronecan->get_driver_index(),│ │ │ backend->_node_id, 0));│ │ └──> AP::can().log_text(AP_CANManager::LOG_INFO,LOG_TAG,│ │ "Registered DroneCAN Baro Node %d on Bus %d\n",│ │ _detected_modules[i].node_id,│ │ _detected_modules[i].ap_dronecan->get_driver_index());│ └──> break;└──> return backend;
3.2 update
front-end / back-end数据更新。
AP_Baro_DroneCAN::update├──> float pressure = 0;├──> WITH_SEMAPHORE(_sem_baro);└──> <new_pressure>├──> <_pressure_count != 0>│ ├──> pressure = _pressure / _pressure_count;│ ├──>_pressure_count = 0;│ └──>_pressure = 0;├──> _copy_to_frontend(_instance, pressure, _temperature);├──> _frontend.set_external_temperature(_temperature);└──> new_pressure = false;
3.3 subscribe_msgs
CAN协议消息处理钩子。
AP_Baro_DroneCAN::subscribe_msgs├──> ap_dronecan == nullptr>│ └──> return;├──> <Canard::allocate_sub_arg_callback(ap_dronecan, &handle_pressure, ap_dronecan->get_driver_index()) == nullptr>│ └──> AP_BoardConfig::allocation_error("pressure_sub");└──> <Canard::allocate_sub_arg_callback(ap_dronecan, &handle_temperature, ap_dronecan->get_driver_index()) == nullptr>└──> AP_BoardConfig::allocation_error("temperature_sub");
3.4 handle_pressure/handle_temperature
处理CAN协议中气压数据。
AP_Baro_DroneCAN::handle_pressure├──> WITH_SEMAPHORE(_sem_registry);├──> driver = get_dronecan_backend(ap_dronecan, transfer.source_node_id, true);├──> <driver == nullptr>│ └──> return;└──> WITH_SEMAPHORE(driver->_sem_baro);├──> _update_and_wrap_accumulator(&driver->_pressure, msg.static_pressure, &driver->_pressure_count, 32);└──> driver->new_pressure = true;
处理CAN协议中温度数据。
AP_Baro_DroneCAN::handle_temperature├──> WITH_SEMAPHORE(_sem_registry);├──> driver = get_dronecan_backend(ap_dronecan, transfer.source_node_id, false);├──> <driver == nullptr>│ └──> return;└──> WITH_SEMAPHORE(driver->_sem_baro);└──> driver->_temperature = KELVIN_TO_C(msg.static_temperature);
3.5 CAN port
目前的官方文档有不一致的问题,希望后续能有完善和更新。
- 【1】Inconsistent CAN startup documentation
- 【2】Inconsistent CAN startup documentation #5475
init_ardupilot└──> AP_CANManager::init└──> AP_DroneCAN::init└──> AP_Baro_DroneCAN::subscribe_msgs
4. 参考资料
【1】ArduPilot开源飞控系统之简单介绍
【2】ArduPilot之开源代码Task介绍
【3】ArduPilot飞控启动&运行过程简介
【4】ArduPilot之开源代码Library&Sketches设计
【5】ArduPilot之开源代码Sensor Drivers设计
相关文章:

ArduPilot开源飞控之AP_Baro_DroneCAN
ArduPilot开源飞控之AP_Baro_DroneCAN 1. 源由2. back-end抽象类3. 方法实现3.1 probe3.2 update3.3 subscribe_msgs3.4 handle_pressure/handle_temperature3.5 CAN port 4. 参考资料 1. 源由 鉴于ArduPilot开源飞控之AP_Baro中涉及Sensor Driver有以下总线类型: …...
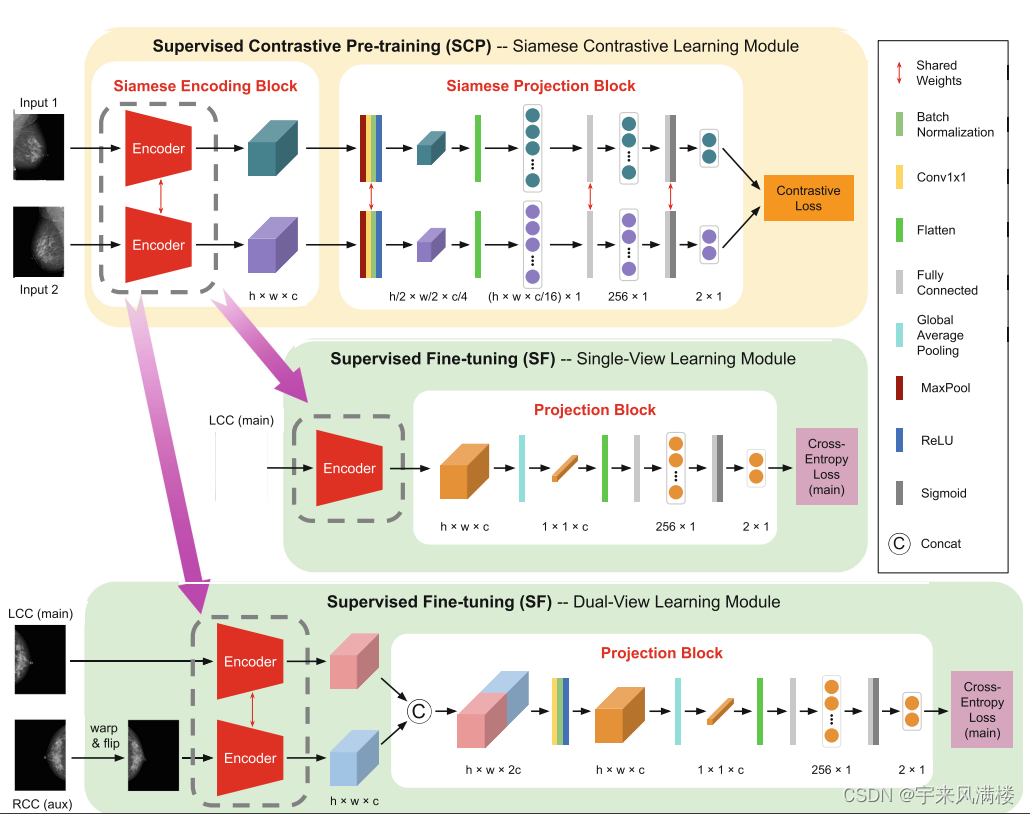
Supervised Contrastive Pre-training for Mammographic Triage Screening Model
方法 品红色箭头表示将生成的孪生编码器分别迁移到单视角学习模块和双视角学习模块...

JVM技术文档--JVM优化思路以及问题定位--JVM可调整参数汇总
阿丹: 一个优秀的程序员,是因为在线上的排查以及遇到的线上、生产事故较多所以定位问题以及解决问题会比普通程序员快很多,所以一个优秀的程序员要逐渐形成自己的方法论,来完善和解决问题。 我们是如何发现问题的呢? …...

Oracle10g数据库迁移方案
试验了很多次Oracle数据库迁移才成功,贴出来给大家参考一下,我看到有的地方写迁移之后还需要重新建立temp表空间,这个还没有研究。另外说一点的是两个数据库的版本一定要一致,之前失败过一次,就是因为两个数据库的版本…...

备忘录模式:对象状态的保存与恢复
欢迎来到设计模式系列的第十八篇文章,本篇将介绍备忘录模式。备忘录模式是一种行为型设计模式,它允许在不破坏封装性的前提下捕获一个对象的内部状态,并在之后恢复该状态。这种模式通常用于需要提供撤销操作的情况。 什么是备忘录模式&#…...

C# InvokeRequired线程安全
C# InvokeRequired线程安全 为了保证新家的线程可能要对主界面的控件元素的属性发生一些改变,此时防止此操作对于主线程的影响,就提出了 InvokeRequired方法,保证主线程的安全,同时新加的线程也可以改变主页面中元素的值。 定义…...
pdf怎么转成jpg图片格式
pdf怎么转成jpg图片格式?对于大家平时在工作或者生活中的图片使用习惯,经常需要将各种格式的文件转换成易于浏览和使用的JPG格式图片以便保存。如今,因为pdf文件具有更强的稳定性和设备兼容性,PDF文件在平时的电脑使用过程中可以说…...
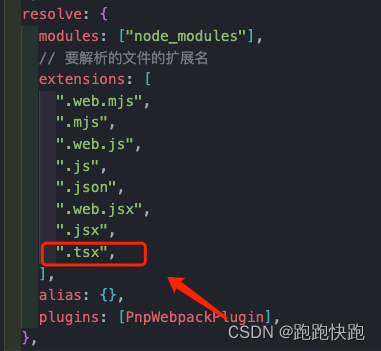
React +ts + babel+webpack
babel babel/preset-typescript 专门处理ts "babel/cli": "^7.17.6", "babel/core": "^7.17.8", "babel/preset-env": "^7.16.11", "babel/preset-react": "^7.16.7", "babel/preset…...
红队专题-REVERSE二进制逆向反编译
红队专题 招募六边形战士队员IDA pro安装python2加入环境变量py2安装pip安装IDA 7.0 proIDAPython: importing "site" failed. 招募六边形战士队员 一起学习 代码审计、安全开发、web攻防、逆向等。。。 私信联系 IDA pro 安装python2 python-2.7.3.msi 加入环…...

Spring技术原理之Bean生命周期原理解析
Spring技术原理之Bean生命周期原理解析 Spring作为Java领域中的优秀框架,其核心功能之一是依赖注入和生命周期管理。其中,Bean的生命周期管理是Spring框架中一个重要的概念。在本篇文章中,我们将深入探讨Spring技术原理中的Bean生命周期原理…...
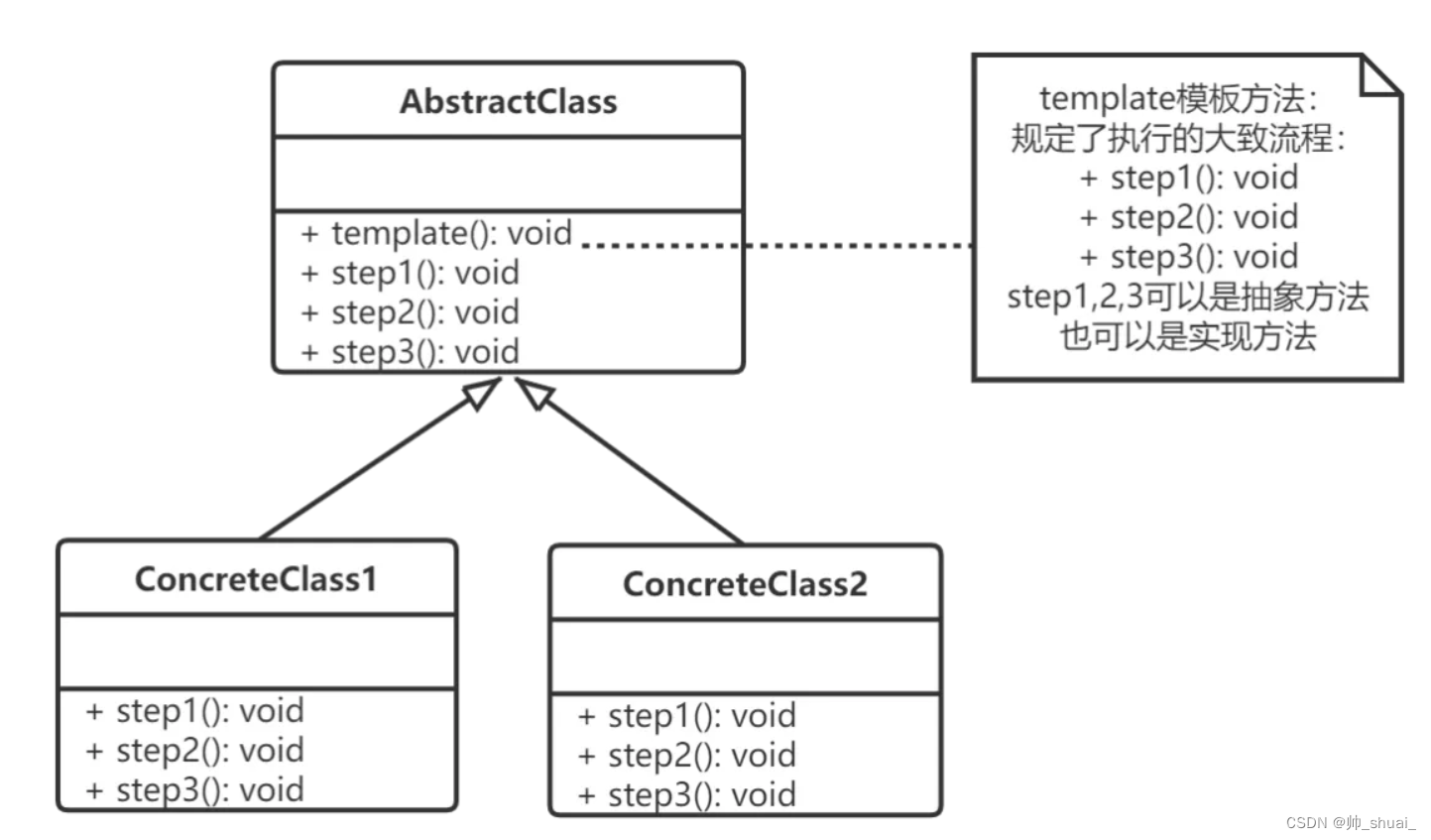
Unity实现设计模式——模板方法模式
Unity实现设计模式——模板方法模式 模板模式(Template Pattern), 指在一个抽象类公开定义了执行它的方法的模板。它的子类可以按需要重写方法实现,但调用将以抽象类中定义的方式进行。 简单说, 模板方法模式定义一个操作中的算法的骨架&…...
)
C++实现高性能内存池(二)
文章目录 一、设计内存池二、实现MemoryPool::construct() 实现MemoryPool::deallocate() 实现MemoryPool::~MemoryPool() 实现MemoryPool::allocate() 实现三、与 std::vector 的性能对比一、设计内存池 在上节中,我们在模板链表栈中使用了默认构造器来管理栈操作中的元素内…...

沪深300期权一个点多少钱?
经中国证监会批准,深圳证券交易所于2019年12月23日上市嘉实沪深300ETF期权合约品种。该产品是以沪深300为标的物的嘉实沪深300ETF交易型指数基金为标的衍生的标准化合约,下文介绍沪深300期权一个点多少钱?本文来自:期权酱 一、沪深300期权涨…...
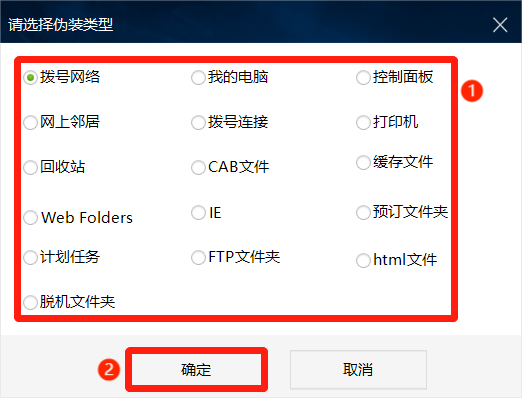
怎么防止重要文件夹丢失?文件夹安全如何保护?
我们在使用电脑的过程中,会将重要数据放在文件夹中,那么,我们该怎么防止重要文件夹丢失呢?下面我们就一起来了解一下。 EFS加密 EFS加密可以对于NTFS卷上的文件夹进行加密,加密后的文件夹将只允许加密时登录系统的用户…...

用于物体识别和跟踪的下游任务自监督学习-1-引言
一:引言: 图像和视频理解是计算机视觉应用中的基本问题,旨在使机器能够像人类一样解释和理解视觉数据。这些问题涉及识别图像和视频中的对象、人物、动作、事件和场景。如图1.1-(a)所示的图像识别任务包括对象检测[1]…...

式子表达ds类——多用位置/值域表示未知数+区间覆盖转区间加:CF407E
https://www.luogu.com.cn/problem/CF407E 多用位置/值域表示未知数 推出的式子中 n n n 表示长度,应该直接换成 r − l 1 r-l1 r−l1 区间覆盖转区间加 推出的式子有 m x , m n mx,mn mx,mn,朴素思路是用单调队列区间覆盖维护 那样就不能很方便…...
)
Python 实现秒表功能(比较好玩的题目)
以下实例使用 time 模块来实现秒表功能: import time print(按下回车开始计时,按下ctrlc停止计时) while True:input("")starttimetime.time()print(开始)try:while True:print(计时:,round(time.time()-starttime,0),秒)time.sle…...
DALL-E 3调参教程;百度新出的AI写小说神器;通义听悟看播客也太爽了;系列博文带你理解生成式AI | ShowMeAI日报
👀日报&周刊合集 | 🎡生产力工具与行业应用大全 | 🧡 点赞关注评论拜托啦! 🔥 2023年诺贝尔奖全部揭晓,一文看完6类奖项花落谁家 https://www.nobelprize.org/prizes 随着最后一项「经济学奖」的揭秘&a…...

设计模式-享元模式
概念 共享内存(主要考虑内存,而非效率)相同的数据,共享使用(JS中未找到经典应用场景) 演示 <!-- 无限下拉列表,将事件代理到高层节点上 --> <!-- 如果都绑定到<a>标签&#x…...

中秋时节赏明月,五子棋戏月饼趣 — Flutter中秋限定版五子棋
前言 当中秋时节来临,我们都期待着与亲人朋友共度这个美好的节日。这个时候,除了传统的赏月和品尝美味的月饼,我还有一个特别的建议——尝试一款有趣的Flutter五子棋游戏!这款五子棋游戏以中秋为主题,游戏的棋子也可爱…...
:从模糊描述到博物馆级输出的9类失效提示词避坑清单)
Midjourney后印象派风格实战手册(2024最新版):从模糊描述到博物馆级输出的9类失效提示词避坑清单
更多请点击: https://intelliparadigm.com 第一章:后印象派风格的本质解构与Midjourney语义映射 后印象派并非单一技法流派,而是一场以主观表达重构视觉真实性的认知革命。其核心在于色彩的情感自主性、形体的结构性简化,以及空间…...

Claude 代码在大型代码库中的运作方式:最佳实践与入门指南
How Claude Code works in large codebases: Best practices and where to start Claude 代码在大型代码库中的运作方式:最佳实践与入门指南 https://claude.com/blog/how-claude-code-works-in-large-codebases-best-practices-and-where-to-start The most succ…...

深度解析Beyond Compare 5密钥生成:从逆向工程到高效激活的实用指南
深度解析Beyond Compare 5密钥生成:从逆向工程到高效激活的实用指南 【免费下载链接】BCompare_Keygen Keygen for BCompare 5 项目地址: https://gitcode.com/gh_mirrors/bc/BCompare_Keygen 在软件授权验证领域,Beyond Compare 5的RSA加密机制一…...
ROS Melodic下UVC摄像头花屏?手把手教你修改usb_cam的pixel_format参数
ROS Melodic下UVC摄像头花屏问题深度解析与实战解决方案 当你在ROS Melodic环境下兴奋地插上UVC摄像头,准备开始你的机器人视觉项目时,突然发现屏幕上显示的是一堆杂乱无章的颜色块——这种"花屏"现象让许多ROS新手感到挫败。本文将带你深入理…...
)
别再死记硬背了!用Python手把手带你画一棵哈夫曼树(附完整代码)
用Python动态构建哈夫曼树:从理论到可视化的完整实践指南 在计算机科学中,数据压缩是一个永恒的话题。想象一下,当你需要传输大量数据时,如何用最少的比特数表示最多的信息?这就是哈夫曼编码要解决的问题。传统的教科书…...

基于LangBot框架快速构建智能对话机器人:从工具集成到RAG应用实战
1. 项目概述:一个能“听懂人话”的智能对话机器人如果你正在寻找一个能快速搭建、高度定制,并且能真正理解你意图的智能对话机器人,那么langbot-app/LangBot这个项目绝对值得你花时间深入研究。它不是一个简单的聊天接口封装,而是…...

AD中域用户密码策略不生效的解决方案
每到一个月,AD就会提示修改密码,改就改吧,但是还提示一些乱七八糟的规则。 我把这些规则都禁用或是设为没有定义了,但还是报“不能和之前的0个密码相同”, 最后, 解决方案: 在域控制器服务器中&…...

NotebookLM心理学研究辅助:为什么92%的心理学博士生漏用了“语义锚定”功能?
更多请点击: https://intelliparadigm.com 第一章:NotebookLM心理学研究辅助 NotebookLM 是 Google 推出的基于用户上传文档进行深度语义理解的 AI 助手,其“以你的资料为中心”的设计范式特别契合心理学研究中对原始文献、访谈转录稿、实验…...

涿州靠谱软体沙发家具城,为你打造舒适家居的理想之选!
在涿州,选择一家靠谱的软体沙发家具城至关重要,它不仅关系到家居的舒适度,还影响着生活品质。今天就为大家推荐涿州市雅木轩家具店(简称:旭日家具),并将它与其他大厂进行对比,让你更…...

Godot引擎集成CEF实现Web混合渲染:gdcef项目架构与实战指南
1. 项目概述与核心价值最近在折腾一个老项目的现代化改造,需要把传统的桌面应用嵌入到Web视图中,实现混合渲染。在技术选型时,我绕不开一个名字:CEF,也就是Chromium Embedded Framework。它几乎是桌面应用内嵌浏览器控…...